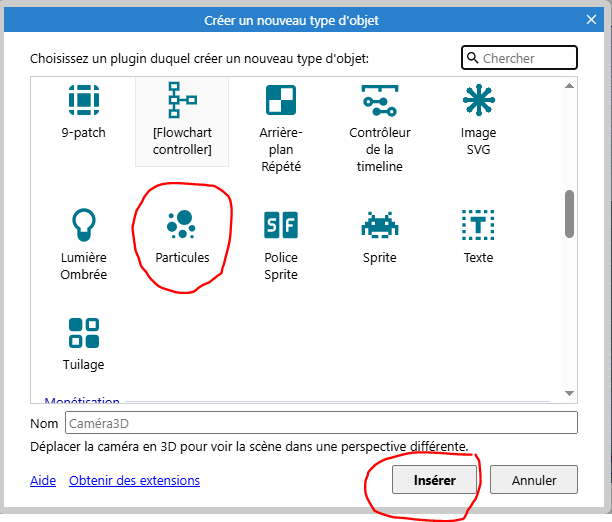
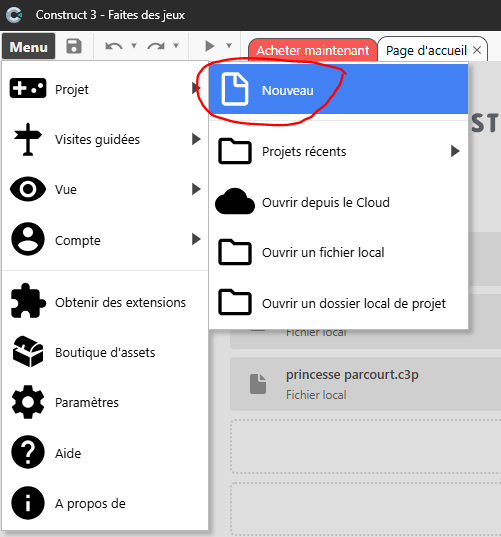
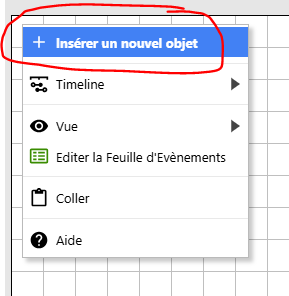
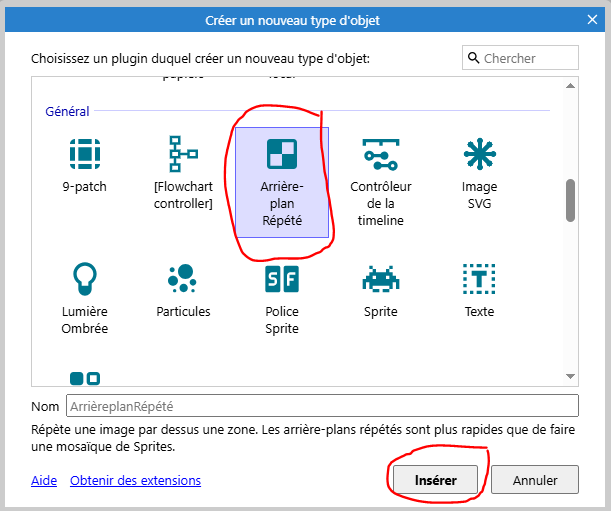
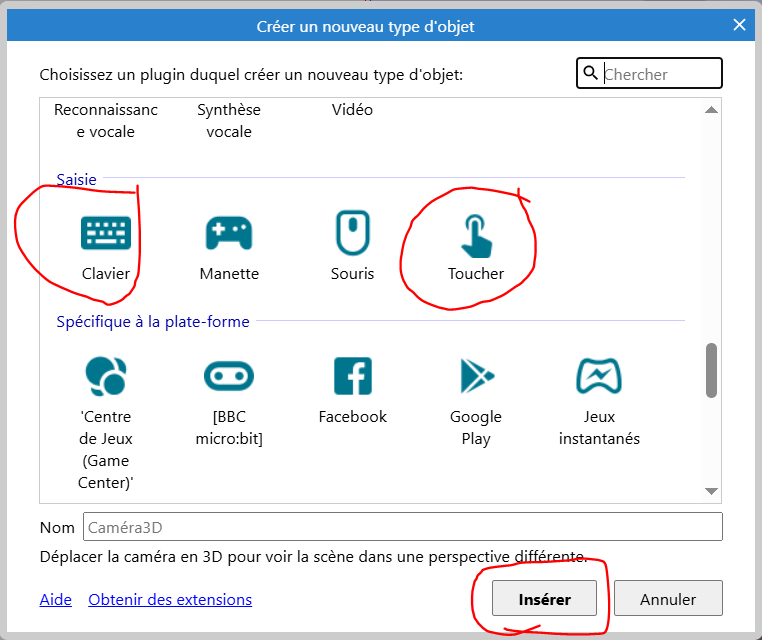
Sur l’onglet Niveau01 demande par le clic droit Insérer un nouvel objet puis choisis Clavier puis Toucher :
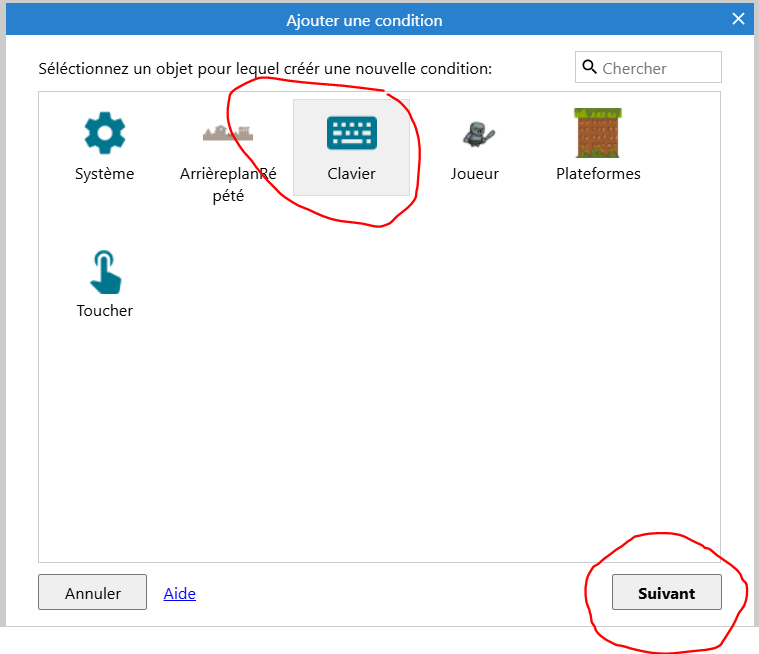
Ton joueur marche, attend, saute, chute. Mais tu constates quand to joueur marche, il ne va que dans un sens vers la droite mais ne se retourne pas vers la gauche. Tu vas récupérer les touches du clavier pour indiquer le sens de la marche.
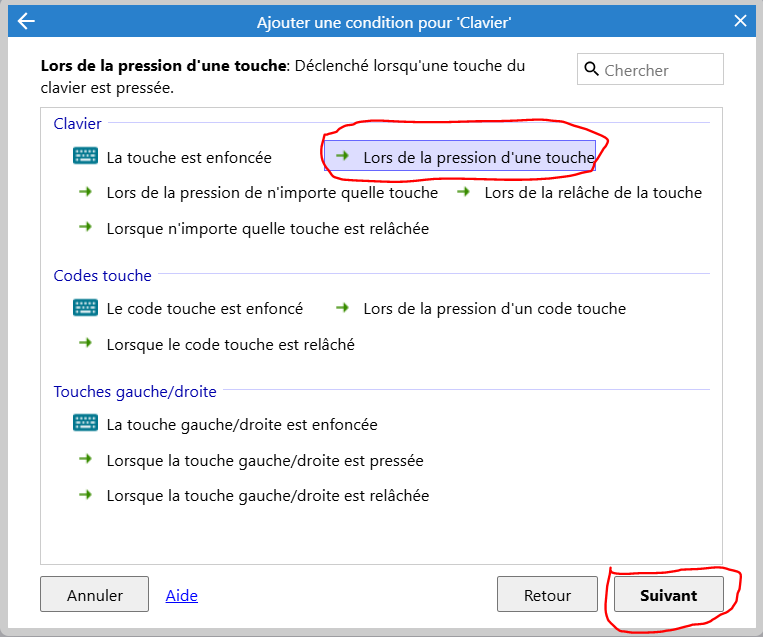
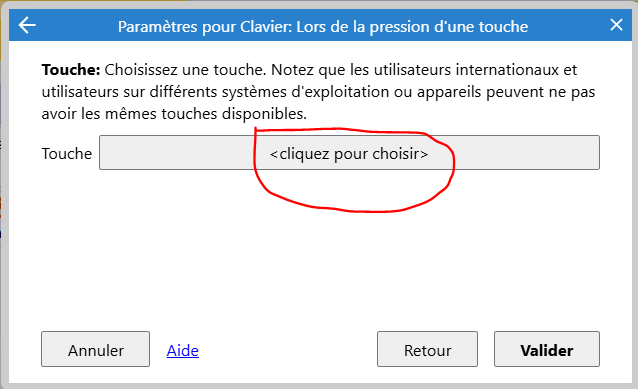
Puis choisis Lors de la pression d’une touche :
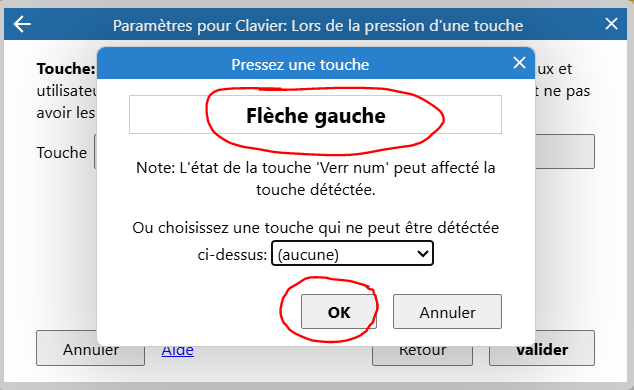
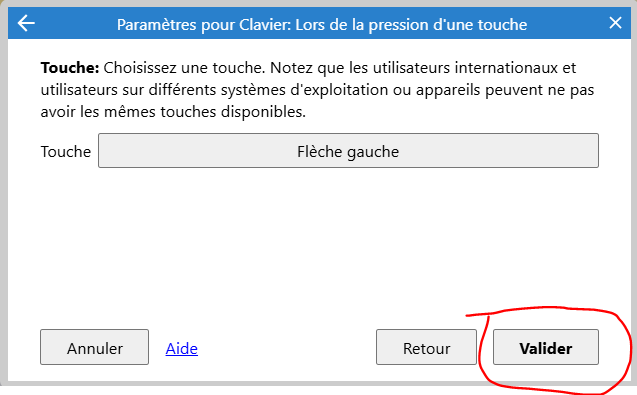
Puis appuis sur la touche de ton clavier pour indiquer la direction gauche :
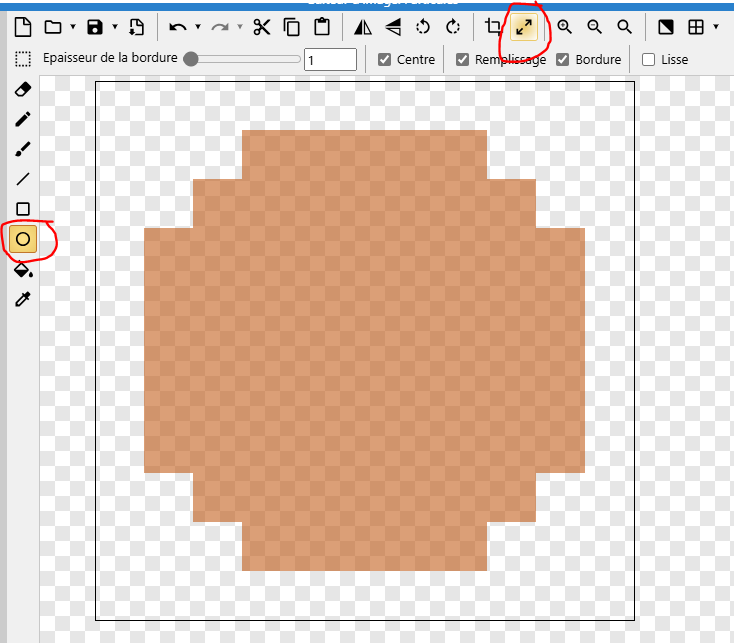
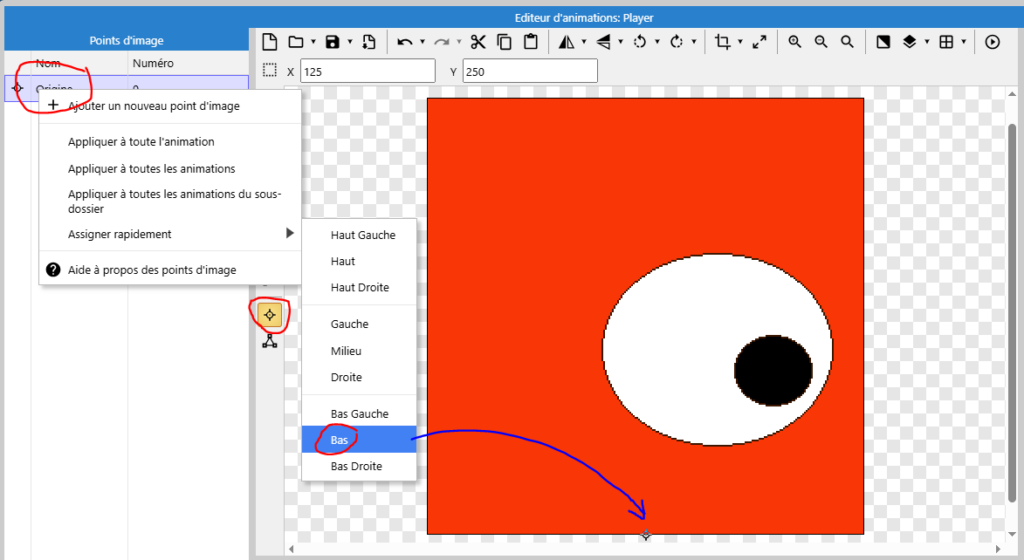
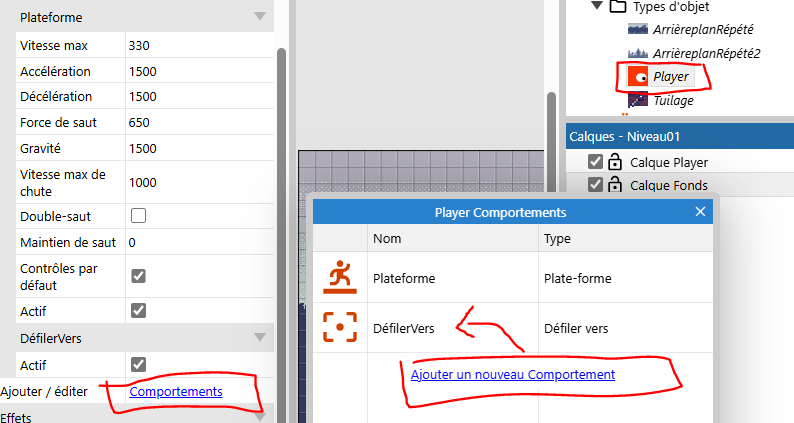
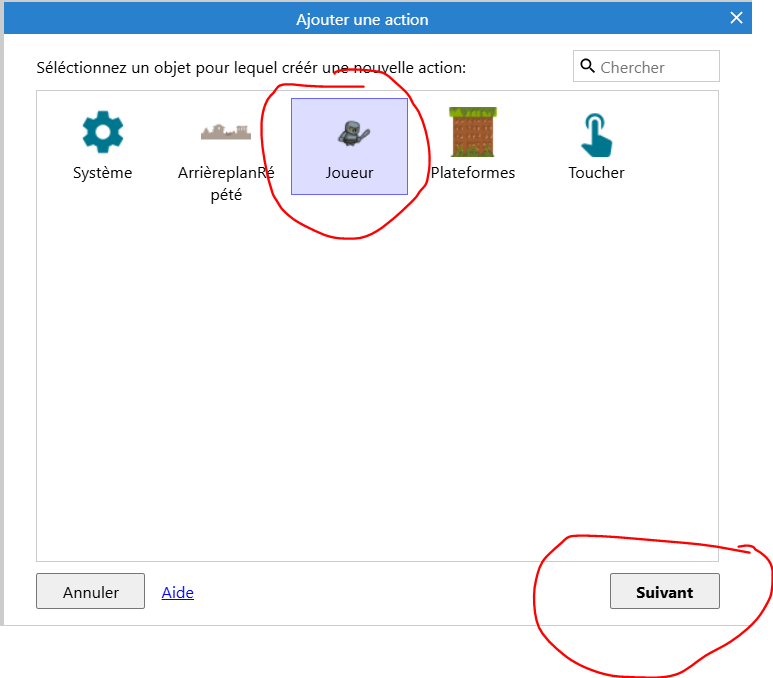
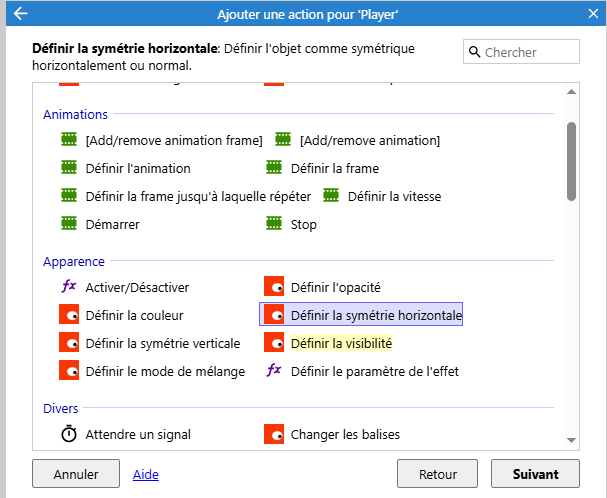
Dans action tu vas inverser l’image :
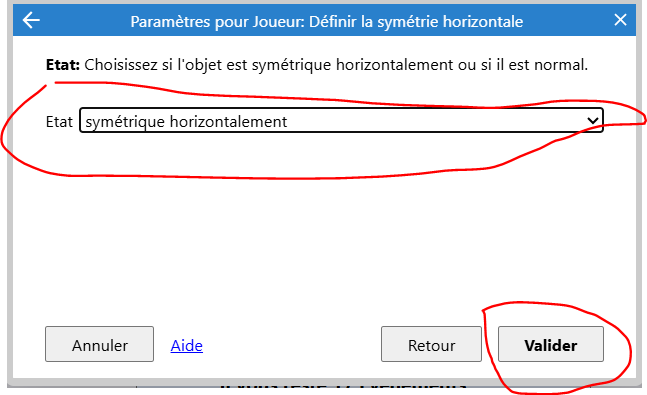
Dans la paragraphe Apparence, tu choisis de Définir la symétrie horizontale :
Dans le cadre de notre participation à la RoboCup Junior, notre association a organisé la conception et la programmation de robots adaptés pour la compétition. Ce rapport détaille notre organisation, les rôles de chacun, et les étapes de notre travail pour préparer la compétition.
Présentation des Équipes
Notre association présente 7 équipes composées d’enfants âgés de 8 à 16 ans. Les équipes sont organisées en fonction de l’âge et des compétences des participants :
Les plus jeunes (8-14 ans) travaillent sur une base de robot MBOT avec une programmation en mode block. Les moins expérimentés optent pour RESCUE LINE ENTRY, les plus expérimentés pour RESCUE LINE.
L’équipe des plus grands (14-16 ans) choisissent de réaliser leur propre robot en utilisant le langage Python pour la RESCUE LINE.
Répartition des Tâches
Travail des Plus Jeunes
Les moins expérimentés se sont concentrés sur la programmation en mode block, ce qui leur a permis de comprendre les bases de la programmation et de la robotique. Ils ont travaillé sur des tâches simples mais essentielles, comme le déplacement du robot, la détection de couleurs et le suivi de ligne. Ils sont utilisés différents robots au plus simple jusqu’au MBOT :
Un robot avec deux capteurs de suivi de ligne :
Puis un robot avec cinq capteurs de suivi de ligne
Travail des plus expérimentés
Les plus expérimentés ont pris en charge la compréhension des problématiques techniques et l’élaboration de solutions pour la conception des robots. Ils ont travaillé sur des aspects plus complexes, comme la gestion du capteur de ligne, l’équilibrage du robot et l’optimisation globale des performances du robot en fonction des exigences du parcours pour la compétition de la Robocup junior.
Collaboration et Tests
Travail en Commun entre les différentes équipes
Bien que les plus grands aient été principalement responsables de la conception technique, un travail en commun a été essentiel. Les solutions techniques élaborées par les plus grands ont été testées par tous les membres des équipes. Cela a permis de valider les solutions et de faire des choix éclairés sur les meilleures options à adopter.
Tests et Validation
Nous avons organisé des sessions de tests régulières où chaque équipe pouvait tester les solutions proposées. Les retours des plus jeunes ont été précieux pour ajuster et améliorer les solutions techniques. Cette collaboration a permis de s’assurer que les robots étaient performants et prêts pour la compétition.
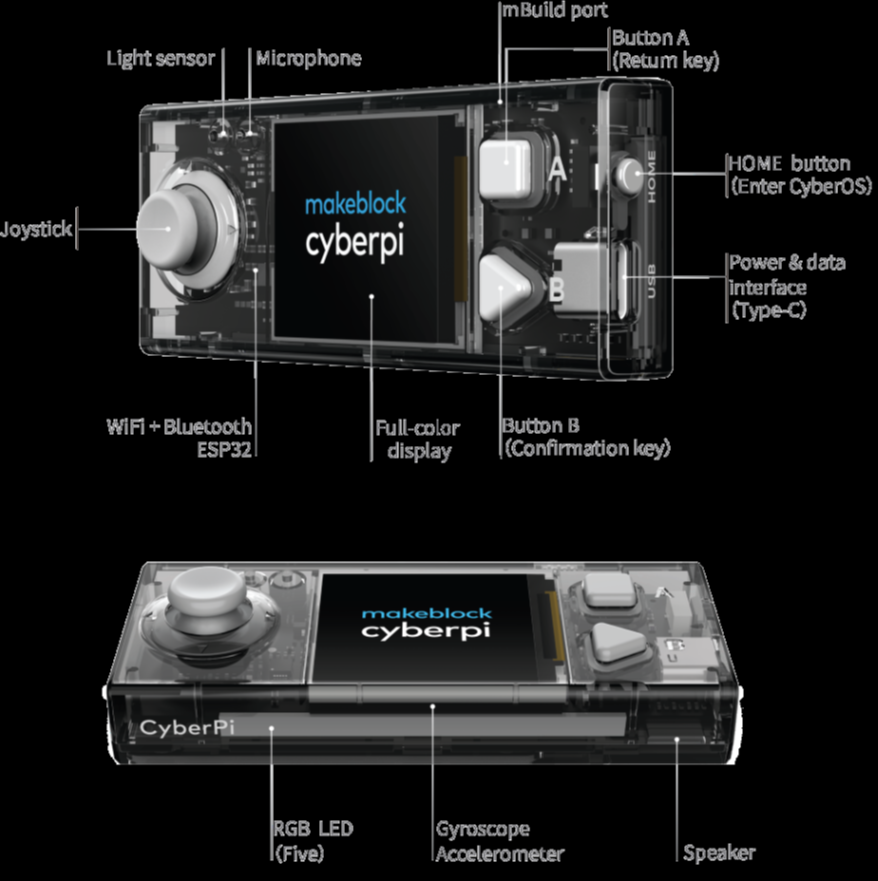
Écran couleur, offrant des interfaces utilisateur conviviales pour l’interaction homme-machine
Système CyberOS, vous permettant d’exécuter les programmes prédéfinis, de définir la langue du système et de mettre à jour le système via le joystick et les boutons intégrés
Un port Micro USB (Type-C) pour la connexion aux PC pour l’alimentation et la communication
Un port de module électronique pour connecter des modules électroniques
Un port de carte d’extension pour la connexion aux cartes d’extension
Plusieurs capteurs intégrés, tels qu’un capteur de lumière et un gyroscope, qui fournissent plusieurs types de sortie de données
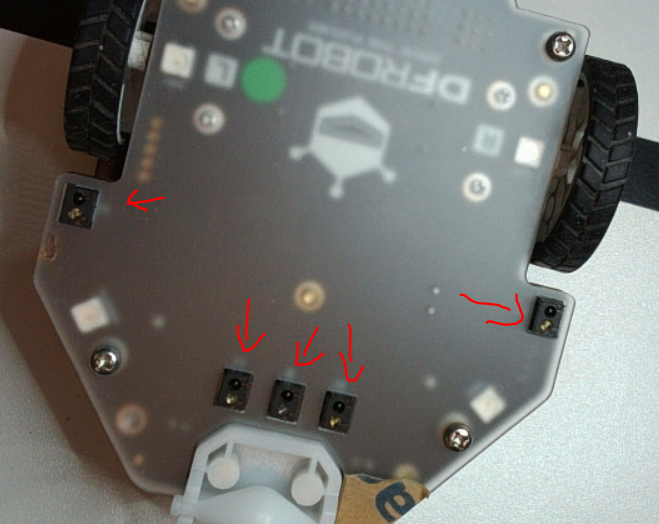
Capteur RVB pour le suivi de la ligne noire
Plage de détection : 5 à 15 mm de l’objet à détecter :
Double pression : lorsque vous appuyez deux fois sur le bouton, le capteur quad RVB commence à mémoriser les valeurs des couleurs de l’arrière-plan (le blanc) et de la ligne noire pour le suivi de ligne. Pour effectuer cette opération, placez les capteurs de lumière sur le parcours avec une ligne noire et appuyez deux fois sur le bouton. Lorsque vous voyez les LED clignoter rapidement, faites glisser les capteurs RVB d’un côté à l’autre au-dessus de la ligne noire sur le fond blanc du parcours pendant environ 2,5 secondes. Les valeurs des paramètres obtenues sont automatiquement stockées.
Si l’apprentissage échoue, les LED clignotent lentement et vous devez recommencer l’apprentissage.
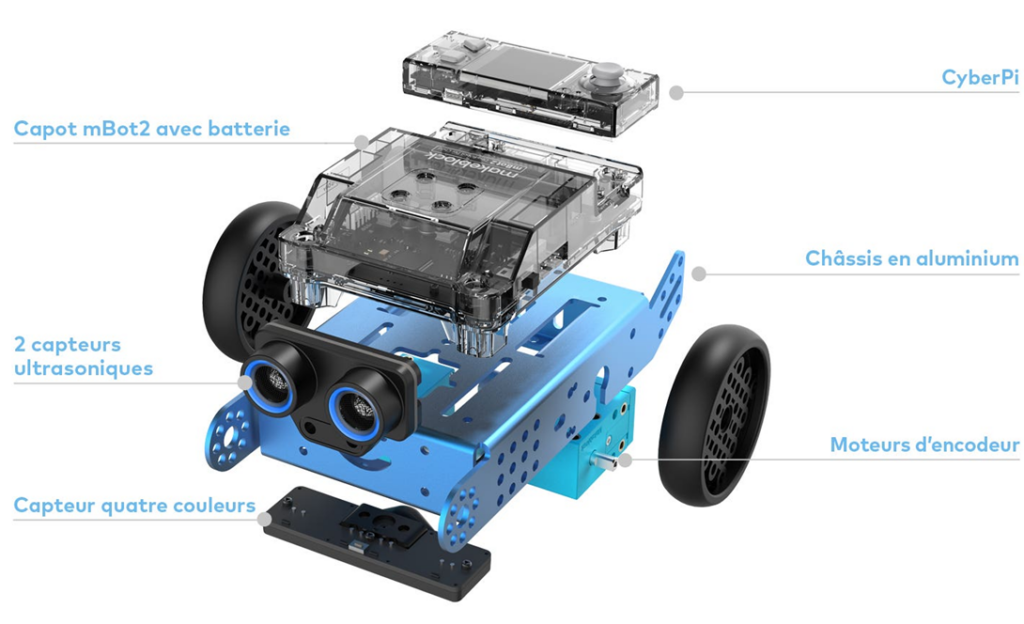
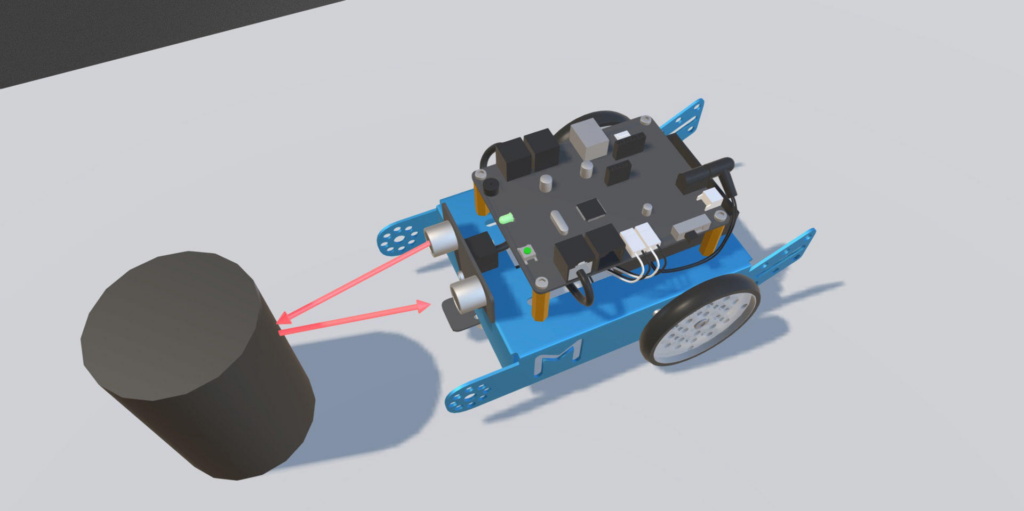
Capteur ultrasons
Le capteur à ultrasons 2 peut être utilisé pour détecter la distance entre un obstacle et celui-ci. L’émetteur de gauche transmet les ondes ultrasonores et le récepteur de droite reçoit les ondes ultrasonores réfléchies. Les êtres humains peuvent entendre des sons de 20 à 20 000 Hz. Les ondes sonores dont les fréquences sont supérieures à 20 000 Hz sont appelées ondes ultrasonores. Les ondes sonores sont réfléchies par les obstacles rencontrés et sont reçues par le récepteur du capteur à ultrasons. En fonction du temps écoulé entre l’émission et la réception, les distances entre le capteur à ultrasons et les obstacles peuvent être calculées.
Distance avec un obstacle :
Gestion des deux moteurs encodeurs
Un moteur électrique encodeur est un moteur équipé d’un dispositif appelé encodeur. L’encodeur est un capteur qui mesure la position angulaire ou la vitesse de rotation du moteur. Il fournit des informations précises sur la position du moteur, ce qui est essentiel pour contrôler avec précision le mouvement du robot.
EM1 : correspond au moteur gauche
EM2 : correspond au moteur droit (attention il est monté à l’envers, pour le faire avancer mettre un nombre négatif)
Rapport Technique : Adaptation du Robot MBOT 2 pour la RoboCup
Introduction
Dans le cadre de notre participation à la RoboCup, nous avons adapté le robot MBOT 2 pour améliorer ses performances, notamment pour le passage des pentes et son équilibrage. Ce rapport détaille les modifications apportées, les défis rencontrés et les solutions mises en place pour atteindre nos objectifs.
Objectifs du Projet
Améliorer l’adhérence du robot pour le passage des pentes.
Optimiser l’équilibrage du robot pour une meilleure stabilité.
Assurer une performance optimale lors de la compétition.
Modifications Apportées
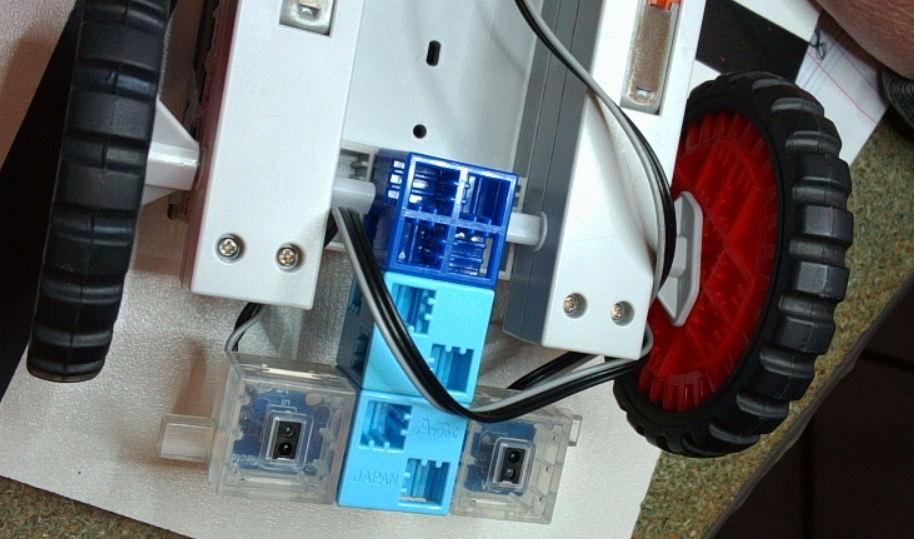
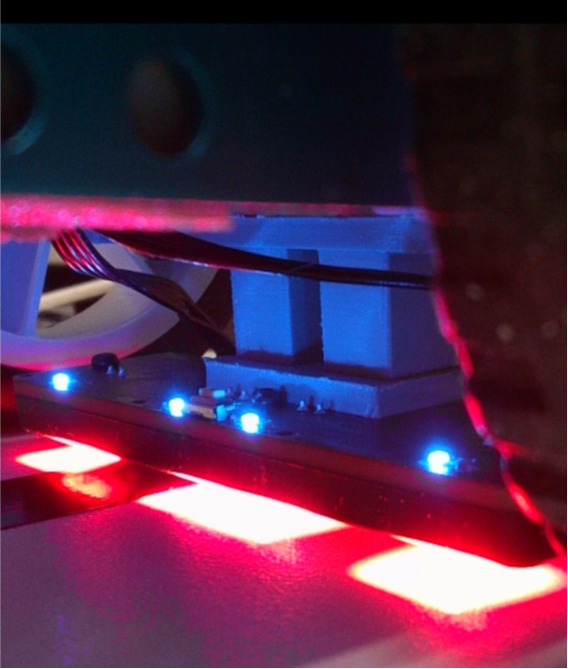
Changement des Roues
Nous avons opté pour des roues avec une bande de caoutchouc afin que le robot adhère mieux au sol, surtout lors du passage des pentes. Ces roues offrent une meilleure traction et permettent au robot de monter et descendre les pentes sans glisser.
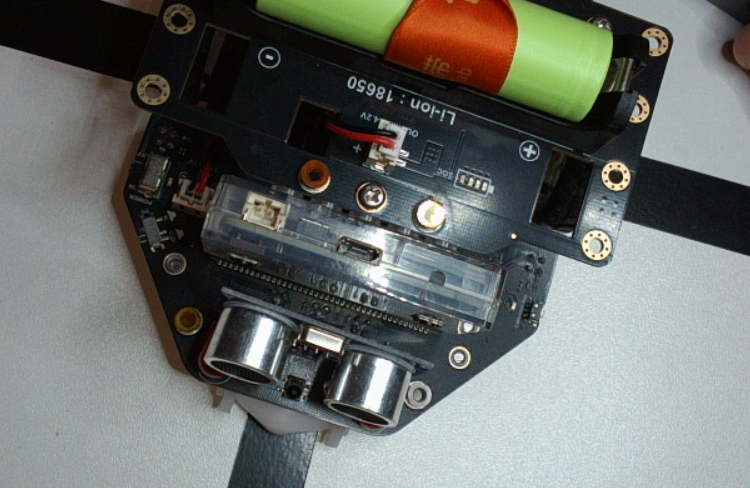
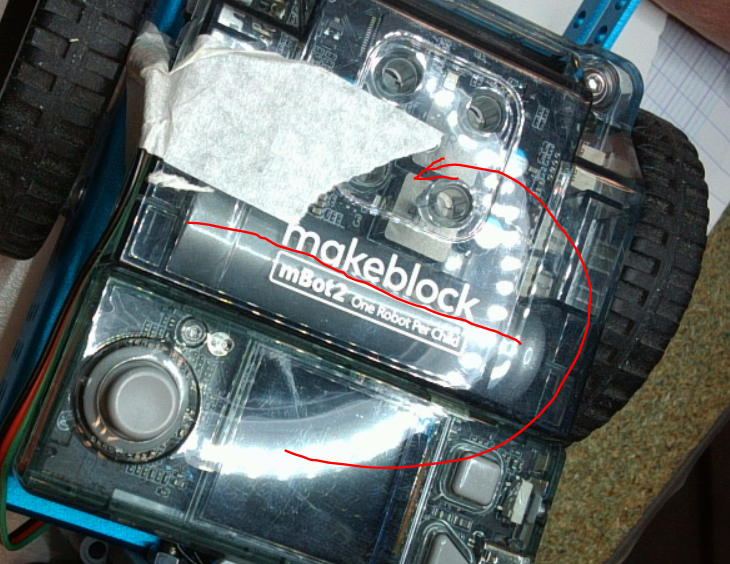
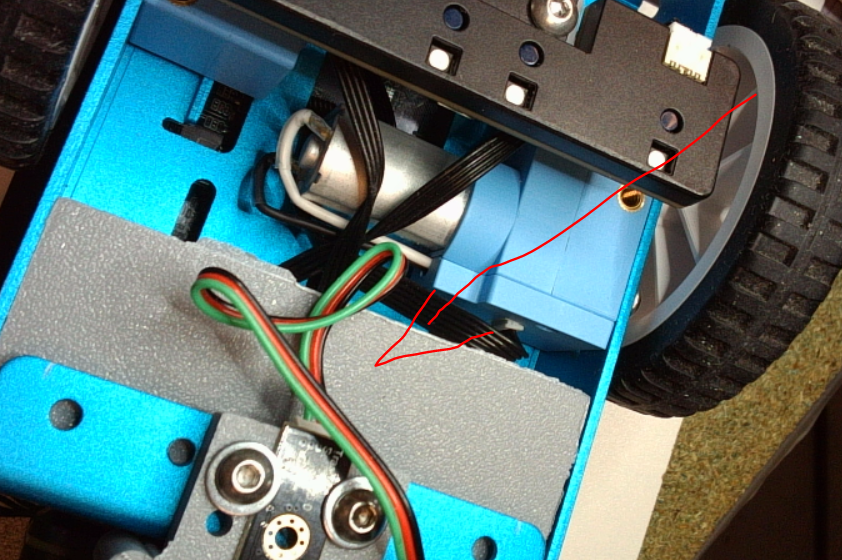
Équilibrage du Robot
Pour améliorer l’équilibrage du robot, nous avons inversé la coque du robot afin de placer la pile plus au centre. Cette modification a permis de répartir le poids de manière plus uniforme et d’améliorer la stabilité globale du robot.
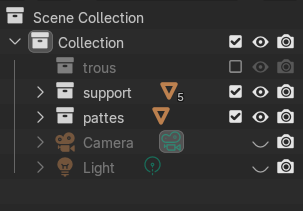
Ajout d’un Caisson avec Poids
Nous avons imaginé un caisson sous le robot, à l’avant, pour ajouter un poids. Après plusieurs essais, nous avons trouvé qu’un gros écrou était la solution idéale. Ce poids supplémentaire aide à maintenir l’avant du robot au sol, ce qui est crucial pour le passage des pentes.
Tests et Validation
Nous avons effectué plusieurs tests pour valider nos modifications. Les résultats ont montré que le robot MBOT 2 est maintenant capable de monter et descendre les pentes avec une meilleure adhérence et une stabilité accrue.
Rapport Technique : Conception d’un Adaptateur pour la roue bidirectionnelle
Introduction
Dans le cadre de notre projet, nous avons conçu un adaptateur pour le robot MBOT 2 afin d’améliorer sa capacité à suivre une ligne noire et à franchir des obstacles. Ce rapport détaille les étapes de conception, les défis rencontrés et les solutions mises en place pour atteindre nos objectifs.
Objectifs du Projet
Permettre au robot MBOT 2 de suivre une ligne noire de manière précise.
Assurer le franchissement des obstacles.
Améliorer la stabilité et la maniabilité du robot.
Conception de l’Adaptateur
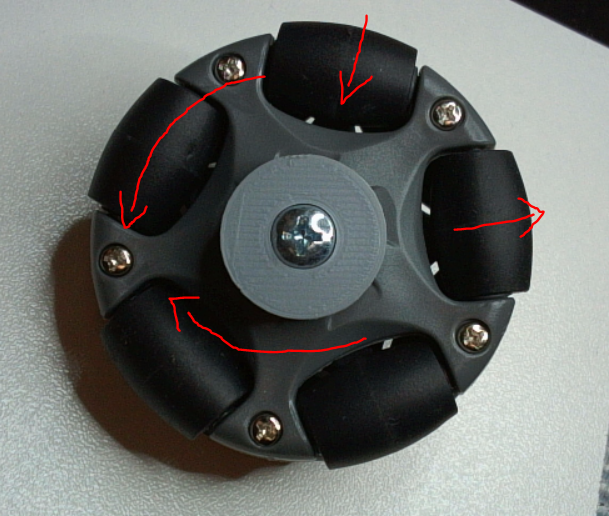
Remplacement de la Rotule par une Roue Bidirectionnelle
Le robot MBOT 2 dispose de base d’une rotule lui permettant de tourner. Cependant, cette rotule ne permet pas au robot de passer les obstacles. Nous avons donc choisi de remplacer la rotule par une roue bidirectionnelle. L’avantage de cette roue est qu’elle permet de tourner dans toutes les directions comme la rotule de base, tout en permettant le franchissement des obstacles.
Première version : deux roues bidirectionnelles
Nous avons conçu une première version avec deux roues bidirectionnelles. Cependant, après réflexion, nous avons réalisé que cette configuration n’était pas optimale.
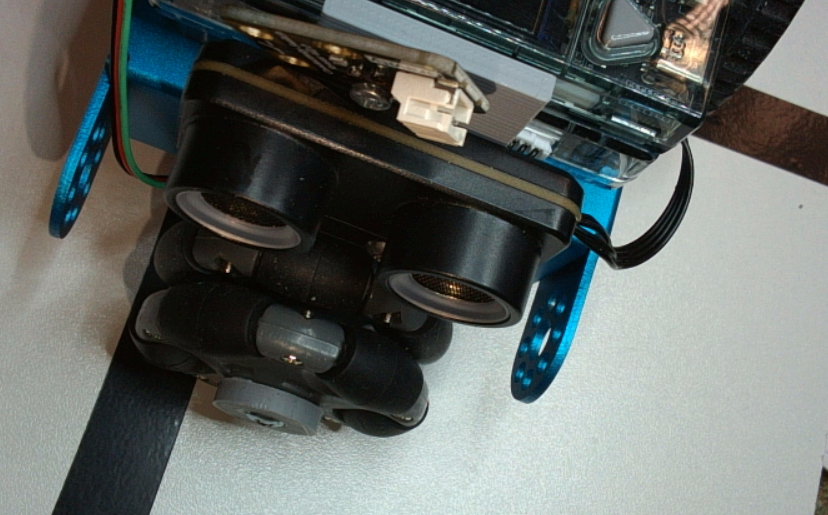
Deuxième version : une roue bidirectionnelle centrale
Nous avons donc réalisé une deuxième version avec une seule roue bidirectionnelle au centre du robot. Cette version a donné de bons résultats et nous a permis d’économiser une roue par robot. Dans cette version, nous avons installé la roue avec l’axe vers l’avant du robot, la roue contre l’avant du robot.
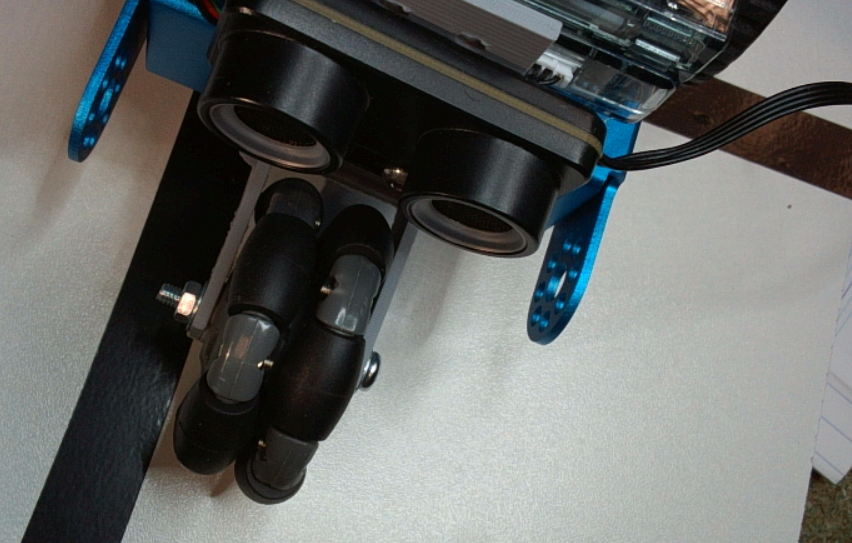
Troisième version : roue parallèle au robot
Nous avons remarqué que dans la disposition précédente, la roue bidirectionnelle avait tendance à rouler sur le côté sur les obstacles et dans le bas de la pente. Nous avons donc réalisé une troisième version avec la roue parallèle au robot. Cette configuration a amélioré la stabilité et la maniabilité du robot.
Intégration de capteurs
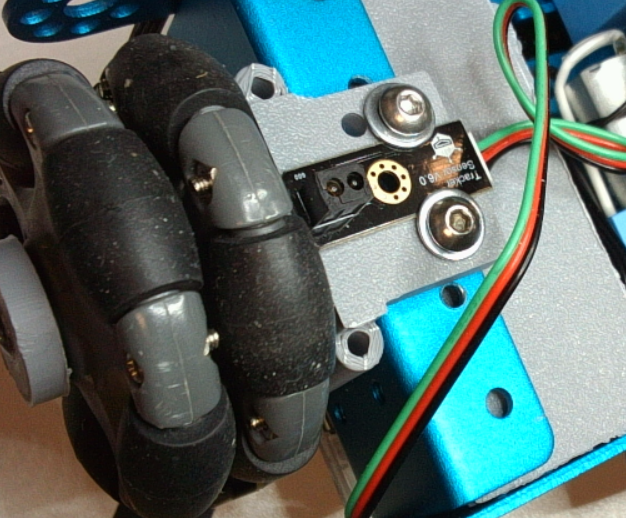
Traqueur de Ligne
Nous avons intégré un traqueur de ligne pour améliorer le suivi de ligne du robot, notamment pour qu’il puisse se redresser sur les lignes droites afin que le robot soit bien parallèle à la ligne noire pour une meilleur prise en compte des carrés verts.
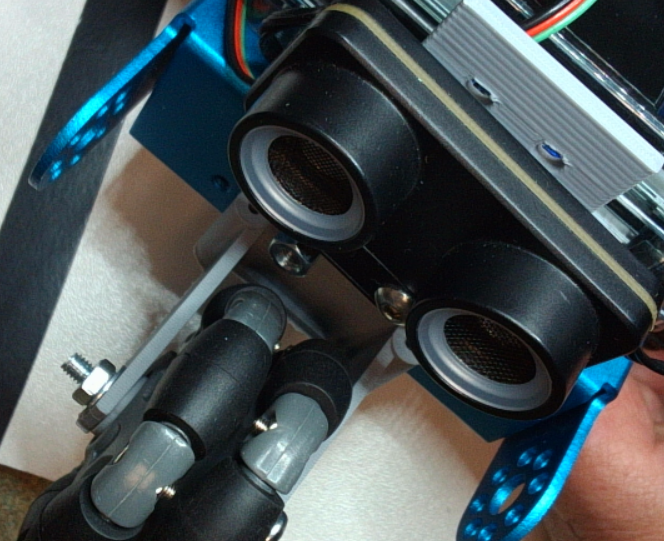
Capteur ultrasons
Un capteur ultrasons a été ajouté pour la détection des obstacles, permettant au robot de les éviter.
Dispositif de détection de bande Conductrice
Nous avons également intégré un dispositif pour détecter la bande conductrice d’électricité afin d’avoir la connaissance de l’arrivée dans la zone de survie.
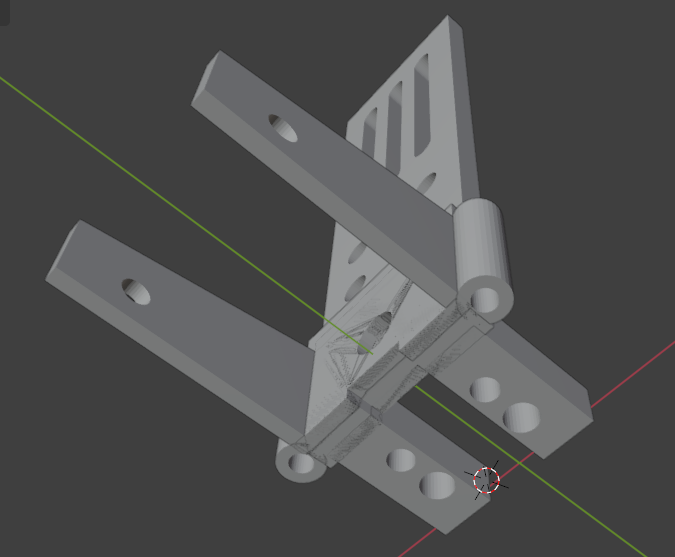
Conception des Adaptateurs avec Blender
Utilisation de Blender
Le travail de conception des adaptateurs du MBOT 2 a été réalisé avec l’outil Blender. Juliette, qui avait déjà une maîtrise de cet outil, a pris en charge le dessin des pièces suite à nos échanges, constatations et idées.
Organisation du Travail
Afin de bien organiser son travail, Juliette a mis en place sous Blender des collections en fonction des configurations de nos adaptateurs. Cette organisation a permis de structurer les différentes pièces et de faciliter les modifications et les ajustements.
Modification des Unités
Juliette a également modifié les unités de base dans Blender pour se mettre à l’unité millimètre. Cette modification a été essentielle pour assurer la précision des dimensions des pièces conçues.
Tests et Validation
Nous avons effectué plusieurs tests pour valider nos modifications. Les résultats ont montré que les adaptateurs conçus avec Blender permettent au robot MBOT 2 de mieux répondre aux exigences de la compétition. Les pièces dessinées par Juliette ont été fabriquées et intégrées au robot, améliorant ainsi ses performances.
Conception d’un Adaptateur RGB pour le Robot MBOT 2
Introduction
Dans le cadre de notre projet, nous avons conçu un adaptateur RGB pour le robot MBOT 2 afin d’améliorer sa capacité à suivre une ligne noire dans diverses conditions, notamment sur des pentes et des angles droits. Ce rapport détaille les étapes de conception, les défis rencontrés et les solutions mises en place pour atteindre nos objectifs.
Objectifs du Projet
Permettre au robot MBOT 2 de suivre une ligne noire de manière précise.
Assurer une bonne mesure de la ligne noire même sur des pentes.
Adapter la position du capteur RGB pour qu’il soit au plus proche du sol sans dépasser les roues.
Conception de l’Adaptateur RGB
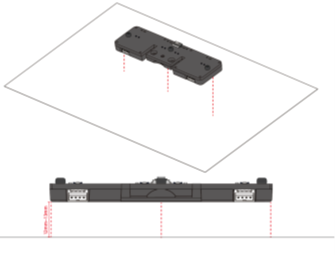
Positionnement du Capteur
Pour que le robot suive correctement la ligne noire, notamment sur des angles droits, nous avons dû rapprocher le capteur RGB des roues. Nous avons déterminé une distance optimale entre l’axe des roues et la position du capteur RGB. Cette distance permet au capteur de détecter la ligne noire avec précision.
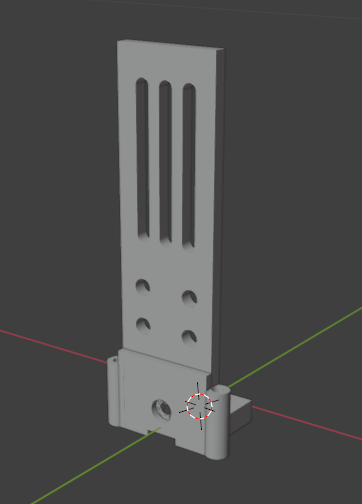
Réglage de la Distance
Dans la conception de l’adaptateur, nous avons prévu une fente qui permet de régler cette distance. Cette fente offre une flexibilité nécessaire pour ajuster la position du capteur en fonction des conditions spécifiques de la piste.
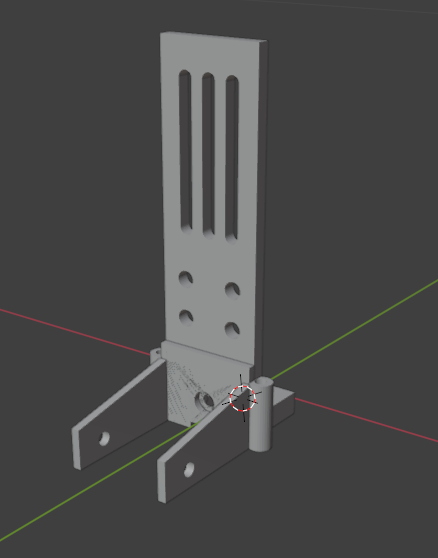
Adaptation pour les Pentes
Nous avons constaté que dans les pentes, le capteur RGB s’éloignait du sol, ce qui rendait la mesure de la ligne noire imprécise. Pour résoudre ce problème, nous avons conçu l’adaptateur de manière à ce que le capteur RGB soit positionné sous les roues, au plus proche du sol. Nous avons également donné un angle au capteur pour qu’il reste proche du sol lors de l’attaque de la pente.
Contraintes Mécaniques
Le capteur RGB ne doit pas dépasser les roues pour éviter les obstacles. Nous avons donc veillé à ce que l’adaptateur respecte cette contrainte tout en permettant une mesure précise de la ligne noire.
Tests et Validation
Nous avons produit plusieurs adaptateurs à l’imprimante 3D et effectué de nombreux tests pour valider la conception de l’adaptateur. Les résultats ont montré que l’adaptateur permet au robot de suivre la ligne noire avec précision, même sur des pentes et des angles droits. Le réglage de la distance via la fente s’est avéré très utile pour optimiser la performance du capteur dans différentes conditions.
Conclusion
La conception de cet adaptateur RGB pour le robot MBOT 2 a été un défi technique intéressant. Grâce à notre travail, le robot peut maintenant suivre une ligne noire de manière précise dans diverses conditions. Nous avons compris l’importance de l’ajustement et de l’adaptation dans la conception des adaptateurs avec l’impression 3D pour répondre aux exigences de la compétition.
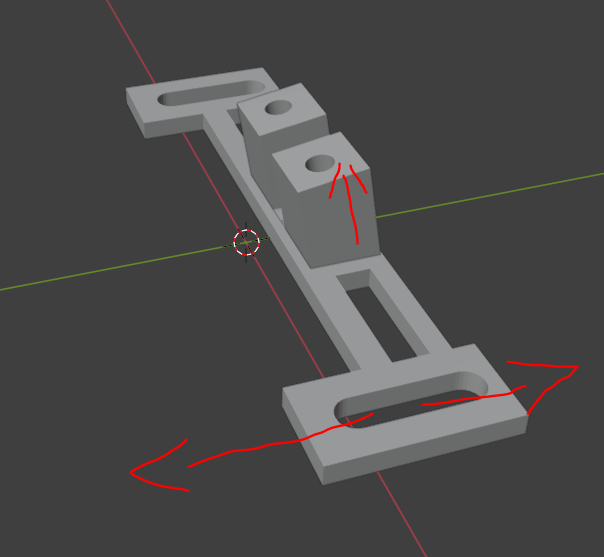
Le robot à l’horizontale, le capteur RGB mesure correctement la ligne noire.
Lorsque le robot attaque une pente, le capteur RGB s’éloigne de la ligne noire. Si la distance est trop importante entre le capteur RGB et le sol, la mesure devient imprécise et fausse.
Avec l’adaptateur que nous avons conçu, le capteur RGB est sous les roues pour une distance optimum entre les capteurs et l’axe des roues pour un suivi des angles droits de la ligne noire et pour une mesure optimum lors du passage des pentes.
La fente permet un réglage fin de l’adaptateur sur le MBOT2 et l’inclinaison permet au capteur RGB d’être au plus près du sol lors de la montée de la pente.
A noter les points importants à vérifier avant une compétition :
La veille :
Valider et donner un numéro de version au programme de la compétition (afficher la version sur le MBOT)
Charger la batterie des MBOT V2
Identifier chaque robot (étiqueter le nom du robot)
Une clé USB par équipe avec le programme de l’équipe chargé
Avant de partir :
Emporter les MBOT V2 équipés chargés de la version du logiciel testé pour la compétition et identfiés pour chaque équipe
Vérifier les fixations des vis des différents éléments (emporter un tournevis)
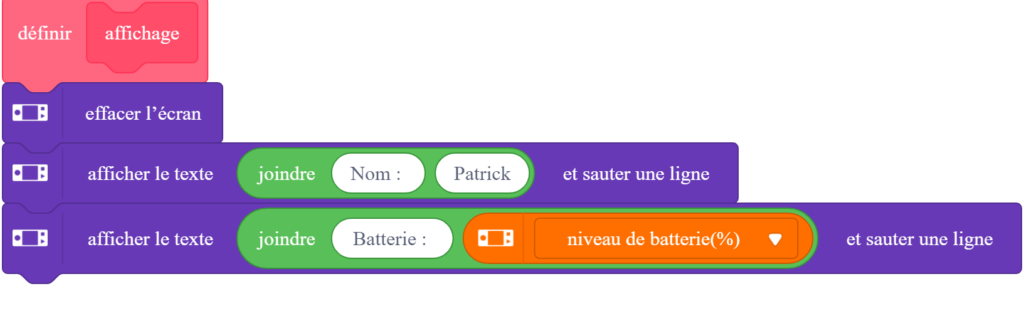
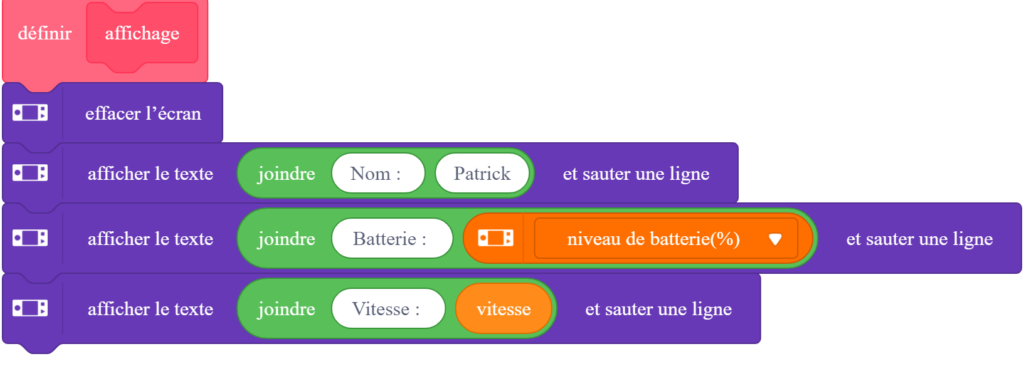
Vérifier le niveau de batterie des robots (afficher le niveau de batterie sur les robots)
Chargement des piles pour robot ADA
Vérifier la présence des câbles USB pour chaque équipe
Amener une feuille blanche et verte pour étalonnage RGB
Penser au HUB USB pour chargement des MBOT V2 lors de la compétition
Chargeur des piles ADA
Prendre les trois batteries supplémentaires
Emporter sur une clé USB identifiée pour chaque équipe avec le programme de la compétition
Emporter un PC avec mBlock et les dernières versions pour chaque équipe
Emporter la documentation sur le MBOT, notre programme, le règlement de la compétition
Emporter des tournevis, des vis 3mm et 5mm de différentes longueurs ainsi que des écrous et rondelles
Prendre du scotch, de la patafix
Prendre des capteurs de lignes et capteurs RGB en remplacement
Prendre moteurs en remplacement
Prendre des roues bidirectionnelles en remplacement
Prendre des crayons et des feuilles
Fer à souder et fil en étain
Prendre la boite d’élastiques
Ecrous pour l’équilibre du robot
Câbles
Une carte micro bit
Ensemble des cartes du robot ADA
Capteur sonore pour détection obstacle
Avant la compétition :
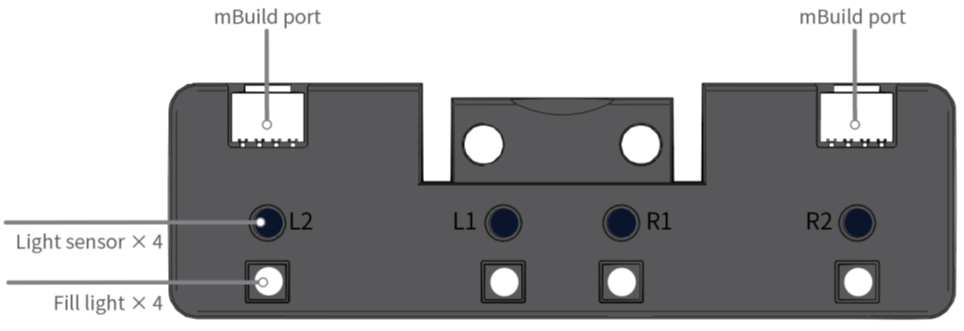
Régler le dispositif RGB avec le tapis de compétition (double click, le dispositif clignote, passer le dispositif du blanc au noir, attention les 4 capteurs doivent mesurer le noir, prévoir une marge de sécurité, les LEDs s’allument sur le blanc et s’éteignent sur la ligne noire)
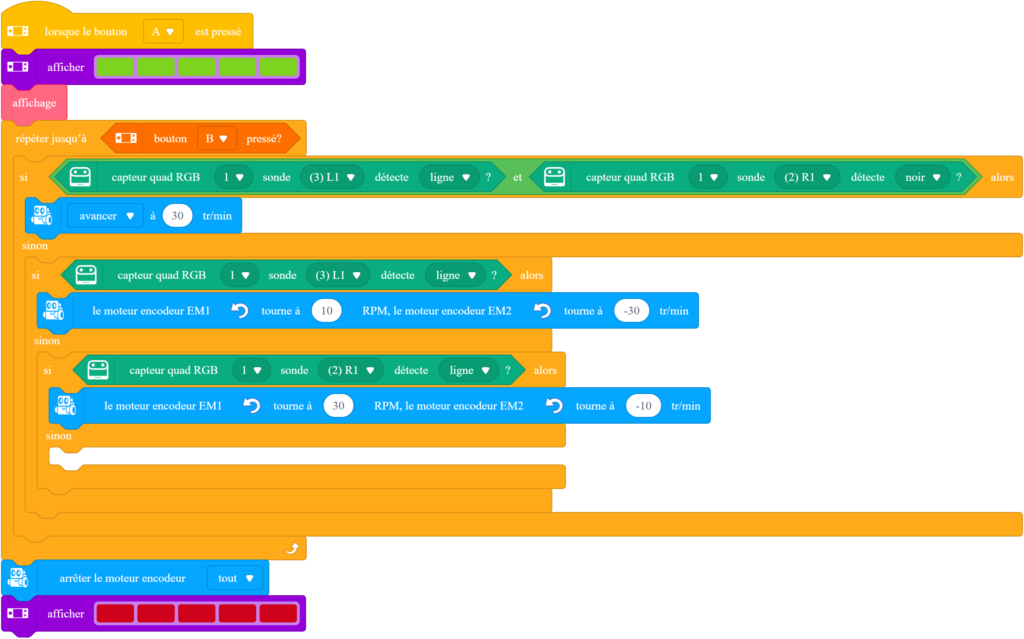
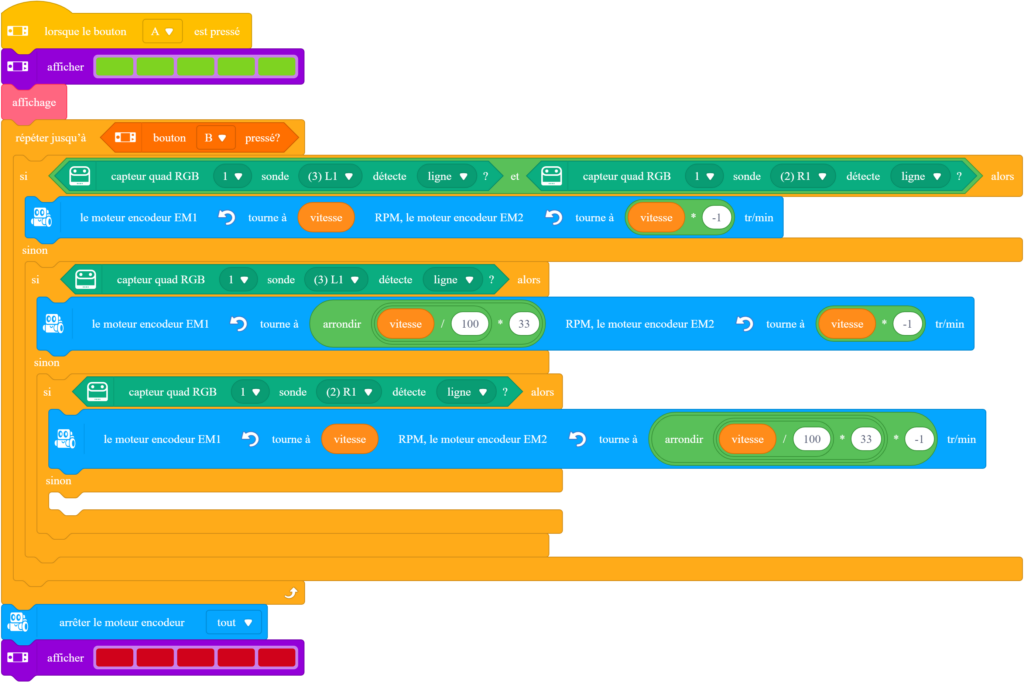
Pour faire tourner ton robot, tu dois faire en sorte que les moteurs de chaque côté tournent à des vitesses différentes. Le moteur droit s’appelle EM2 et le moteur gauche s’appelle EM1.
Pour tourner à droite : Le moteur gauche (EM1) doit tourner plus vite que le moteur droit (EM2).
Pour tourner à gauche : Le moteur droit (EM2) doit tourner plus vite que le moteur gauche (EM1).
Pour que cette différence de vitesse soit bien contrôlée, on utilise des pourcentages. Les pourcentages permettent de définir une proportion de la vitesse maximale. Par exemple :
Si tu veux que ton robot tourne à droite, tu peux régler le moteur gauche (EM1) à 100% de sa vitesse maximale et le moteur droit (EM2) à 30% de sa vitesse maximale. Cela signifie que le moteur gauche tourne à pleine puissance, tandis que le moteur droit tourne beaucoup plus lentement.
Imagine que la vitesse maximale de tes moteurs est comme une course de 100 mètres :
À 100%, le moteur parcourt toute la distance, soit 100 mètres.
À 30%, le moteur ne parcourt que 30 mètres
En utilisant des pourcentages, tu peux facilement ajuster la vitesse de chaque moteur pour que ton robot tourne exactement comme tu le souhaites !
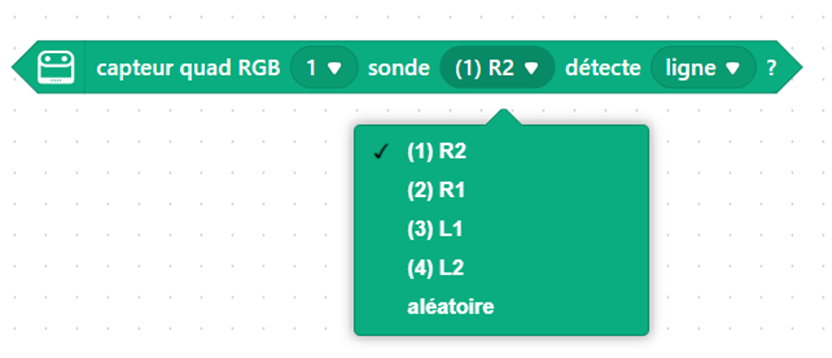
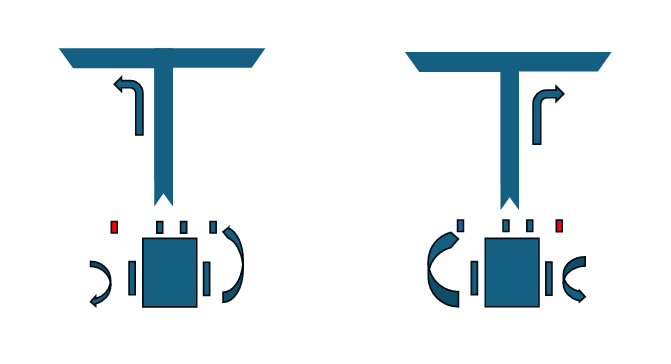
Tu remarques que le robot choisit à gauche sur un croisement :
En inversant L2 par R2 le robot choisit au croisement par la droite :
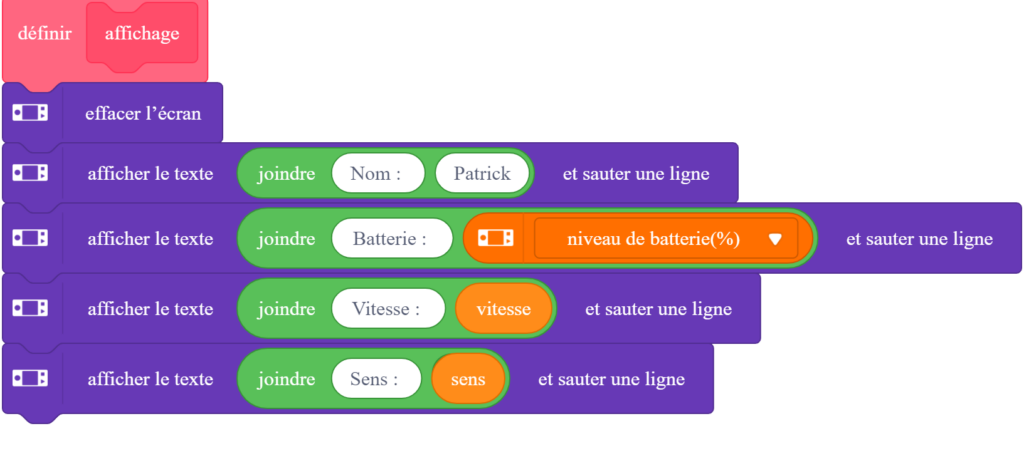
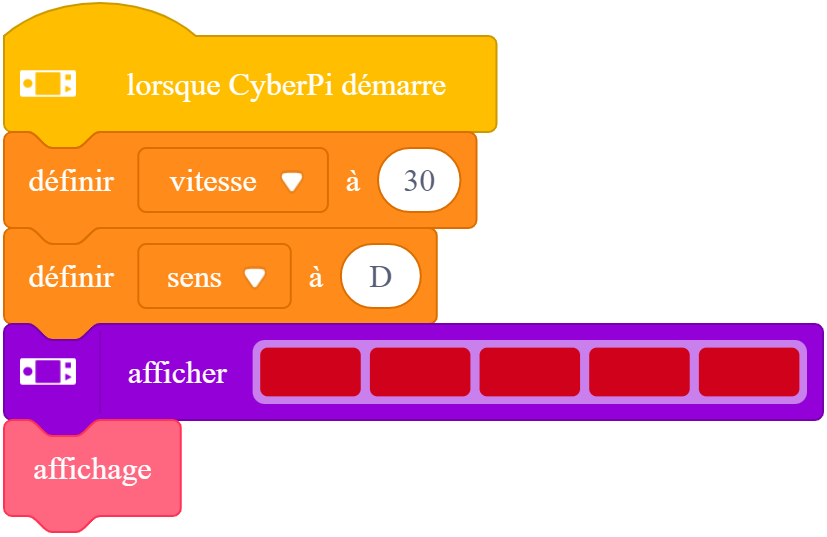
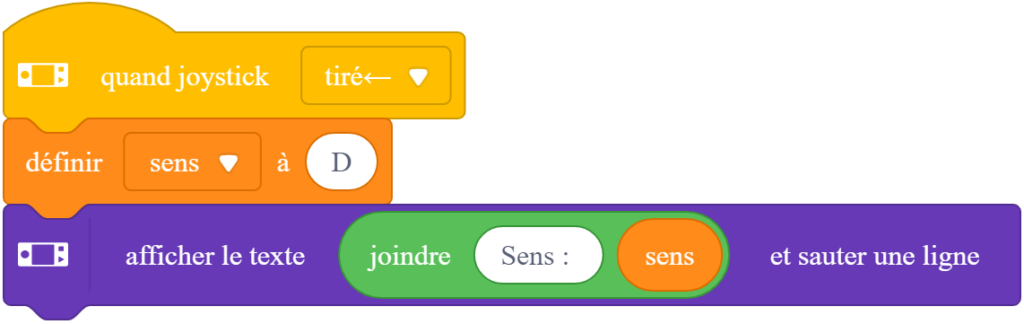
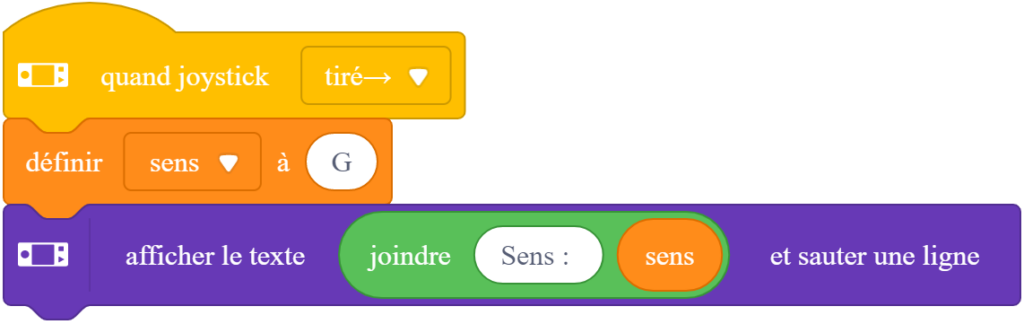
Choisir le sens
Crée une variable sens afin de déterminer dans quel sens le robot doit prendre les croisement :
La variable sens prend deux valeurs :
D pour droite
G pour gauche
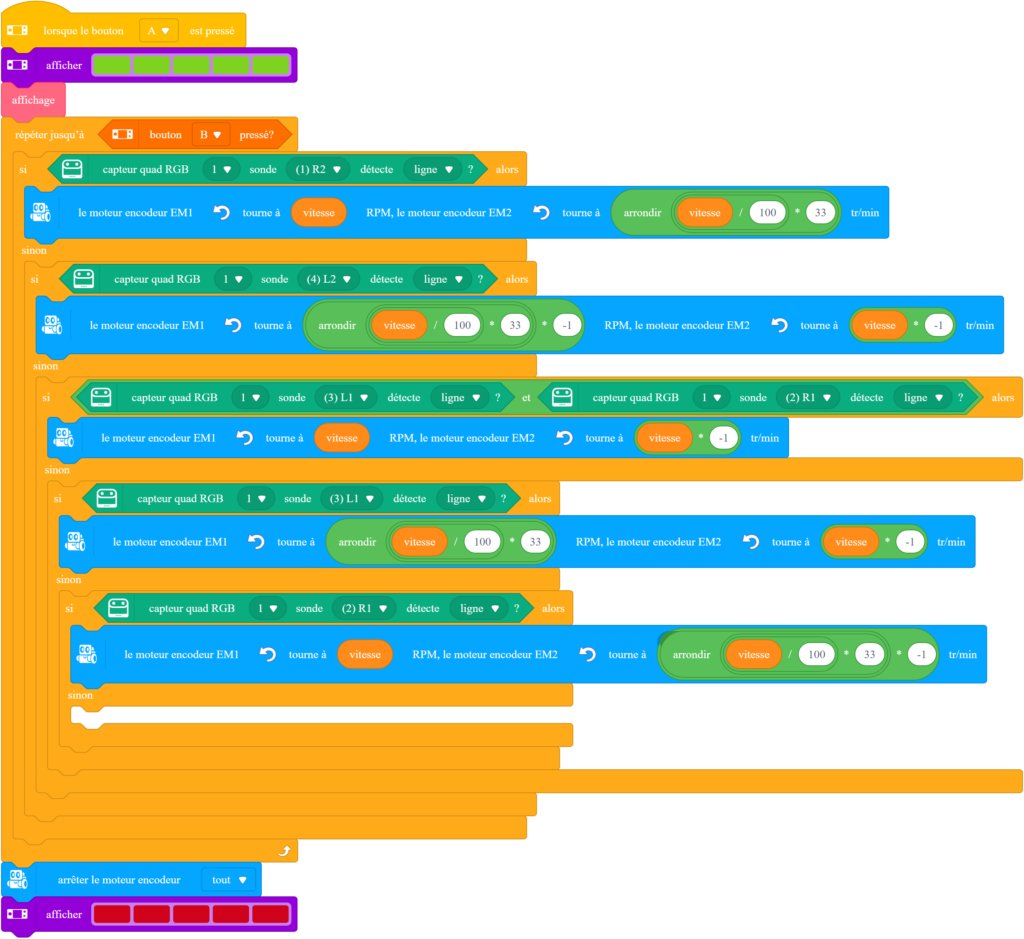
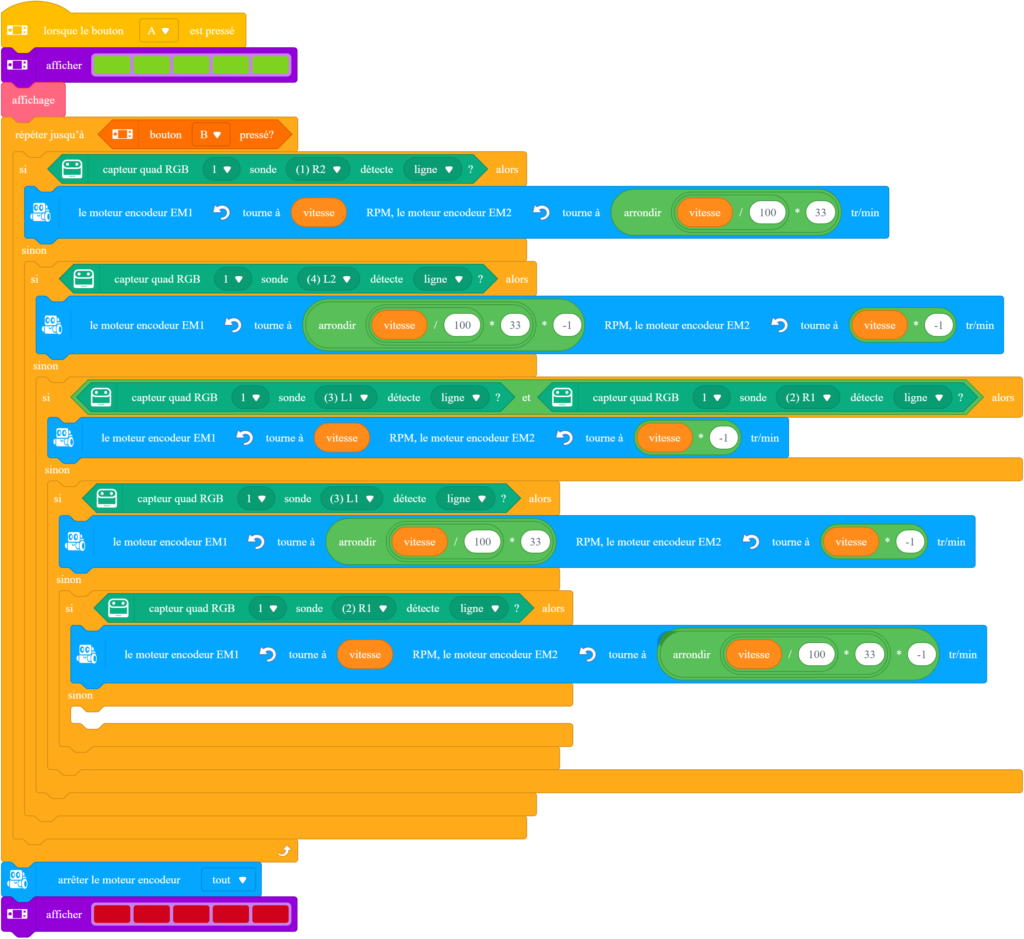
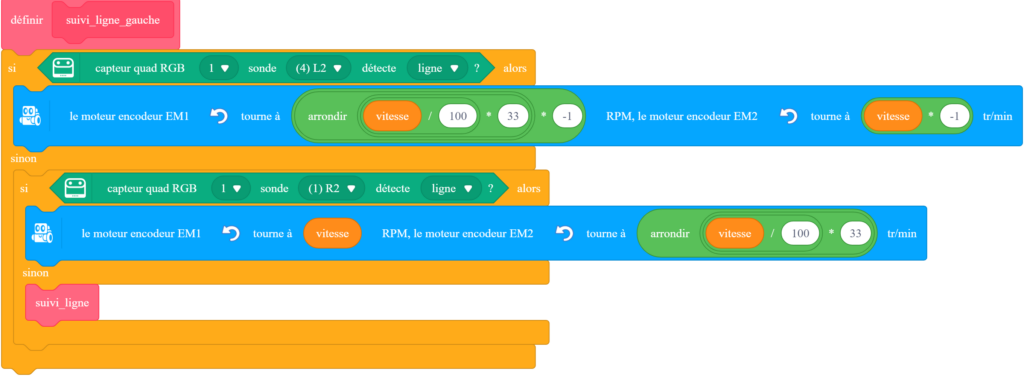
Modifie ton code pour créer ses fonctions :
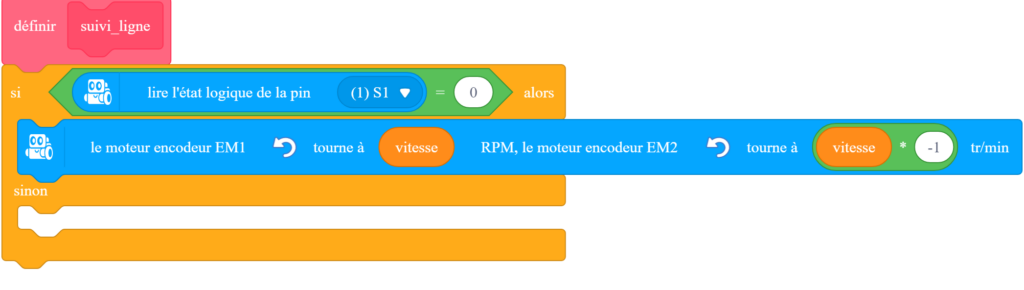
une fonction pour suivre la ligne noire
une fonction pour prendre les virages à angle droit en privilégiant la droite :
une fonction pour prendre les virages à angle droit en privilégiant la gauche :
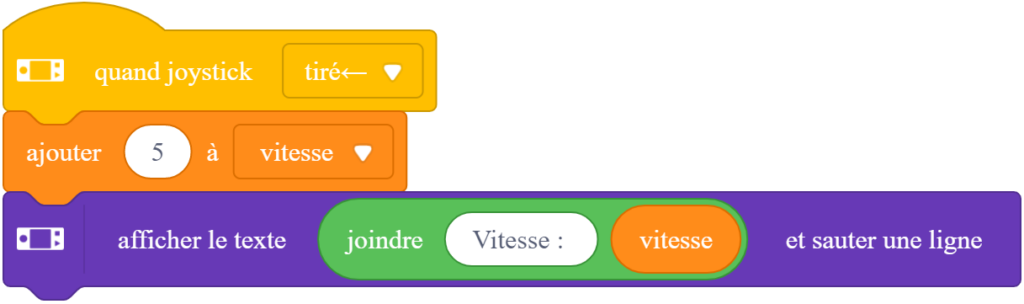
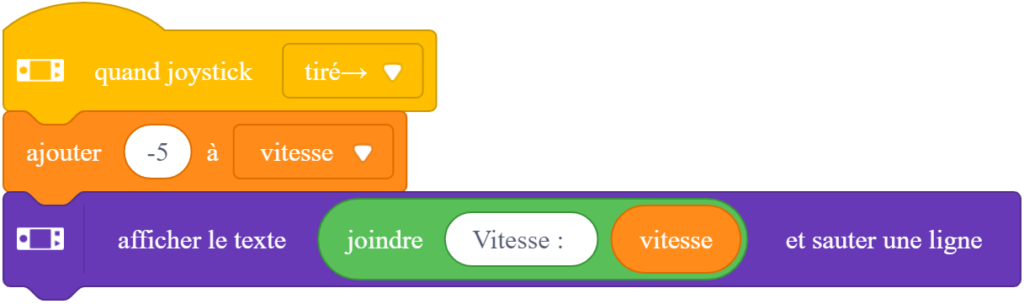
pour modifier le sens avec le joystick
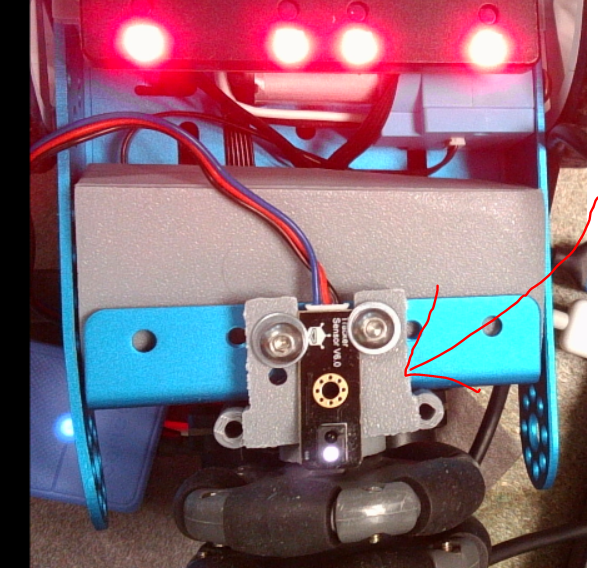
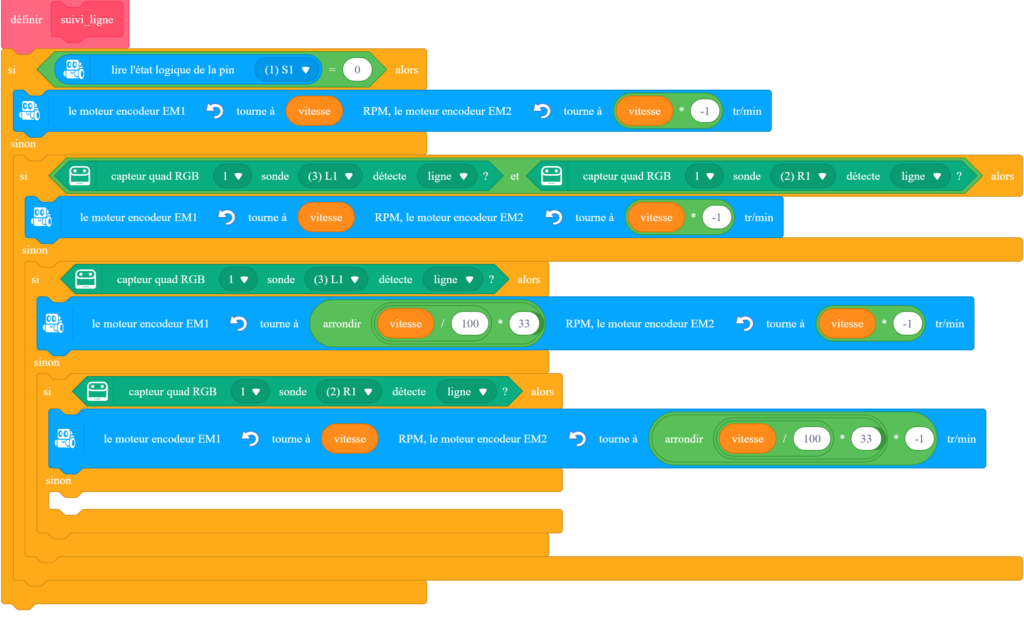
Suivi de ligne en utilisant un trackeur de ligne sur le port S1 du MBOT 2. Son utilisation permet au robot de mieux suivre en ligne droite la ligne noire.