Introduction
Dans le cadre de notre participation à la RoboCup Junior, notre association a organisé la conception et la programmation de robots adaptés pour la compétition. Ce rapport détaille notre organisation, les rôles de chacun, et les étapes de notre travail pour préparer la compétition.
Présentation des Équipes
Notre association présente 7 équipes composées d’enfants âgés de 8 à 16 ans. Les équipes sont organisées en fonction de l’âge et des compétences des participants :
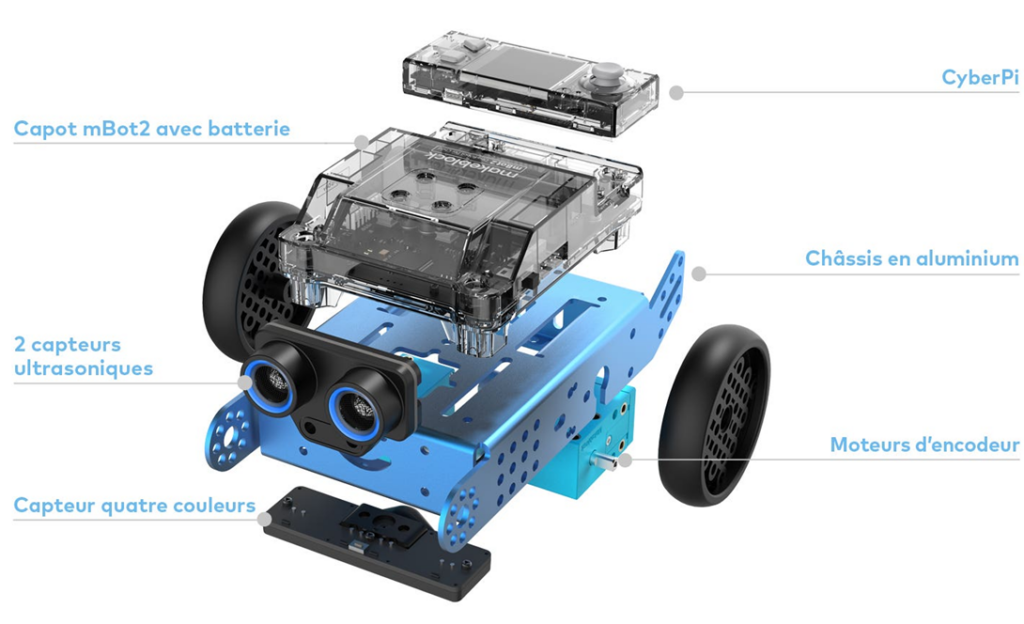
- Les plus jeunes (8-14 ans) travaillent sur une base de robot MBOT avec une programmation en mode block. Les moins expérimentés optent pour RESCUE LINE ENTRY, les plus expérimentés pour RESCUE LINE.
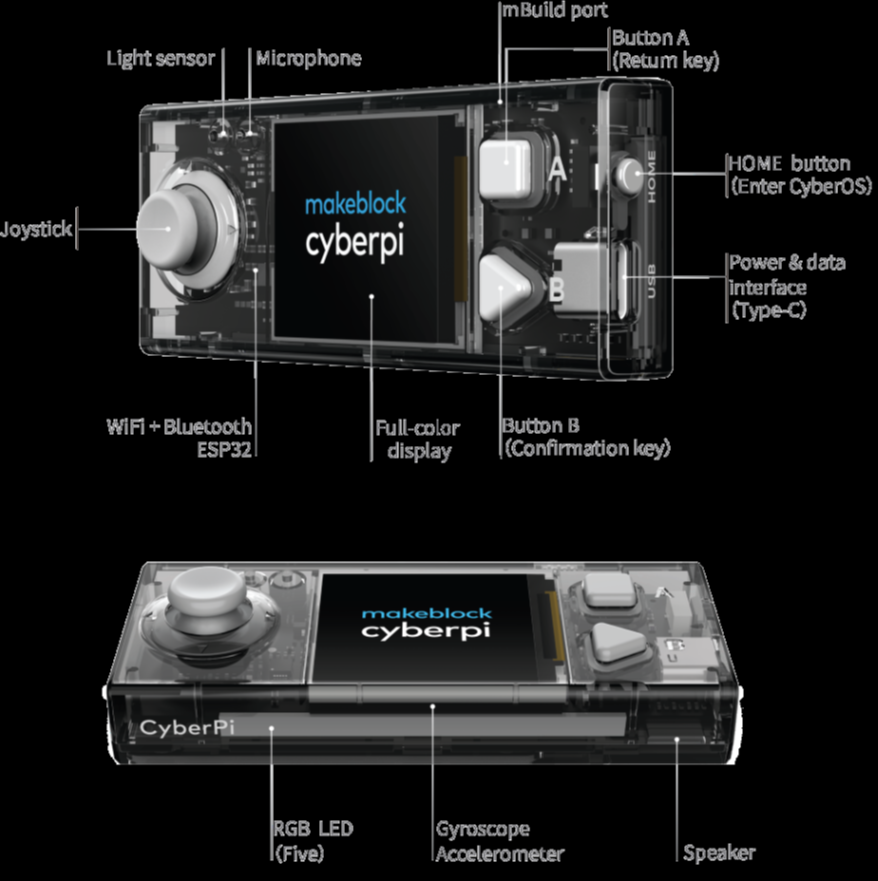
- L’équipe des plus grands (14-16 ans) choisissent de réaliser leur propre robot en utilisant le langage Python pour la RESCUE LINE.
Répartition des Tâches
Travail des Plus Jeunes
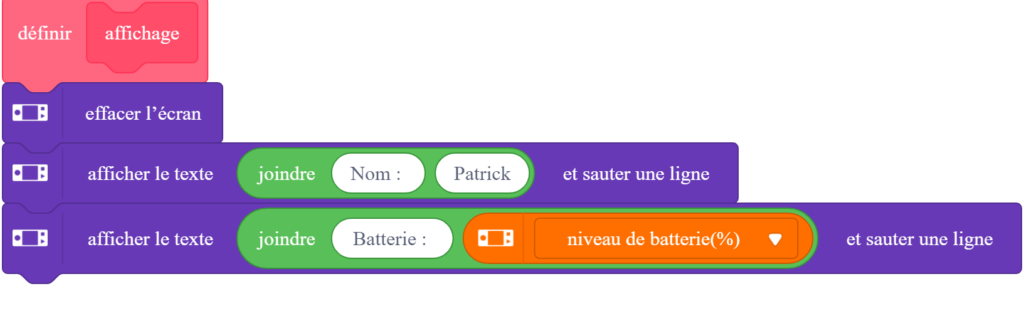
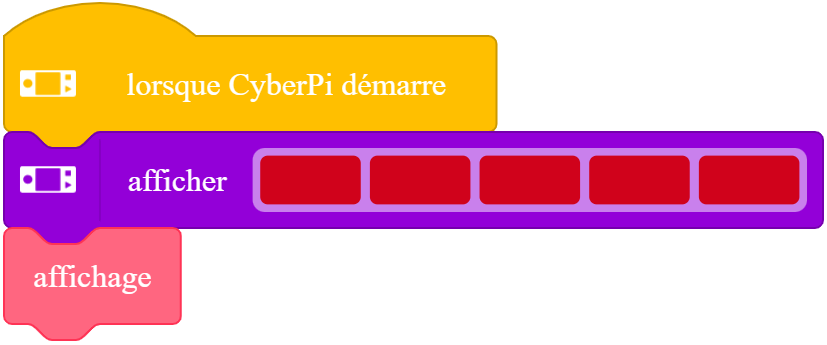
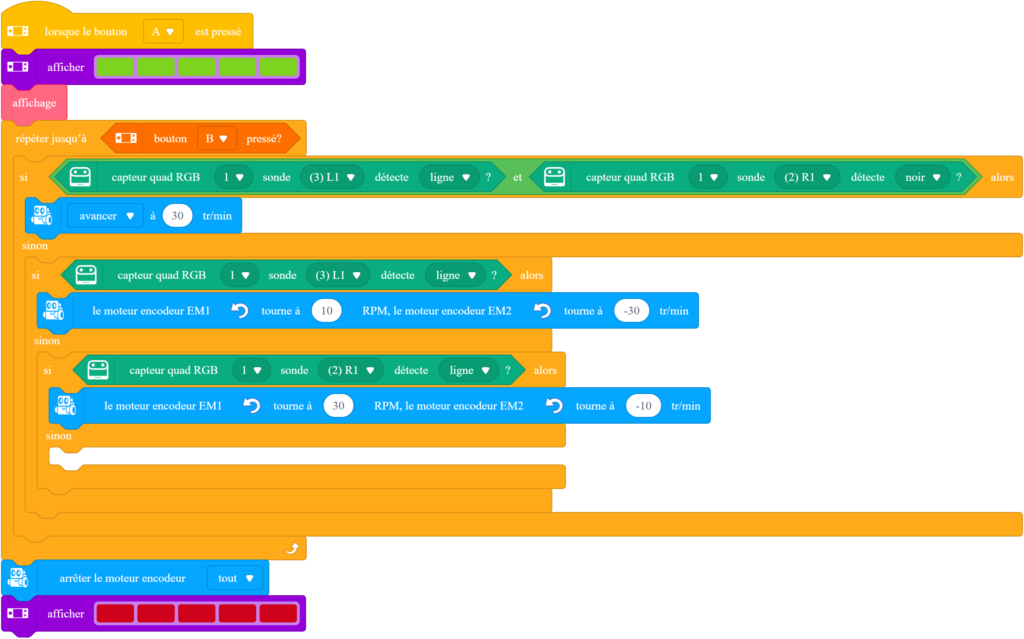
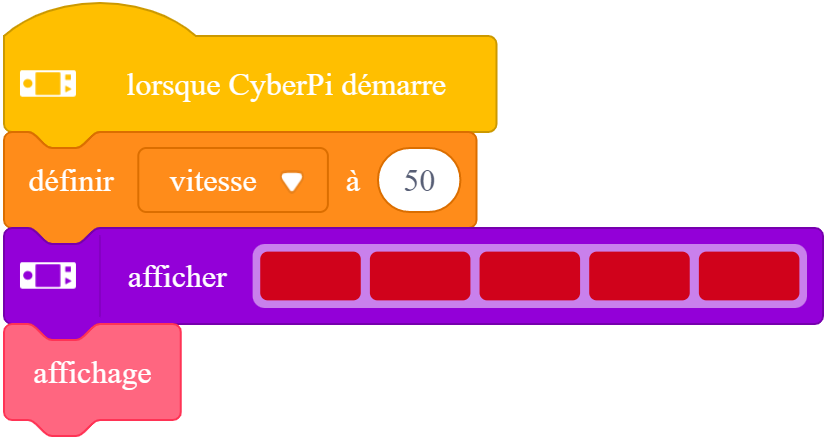
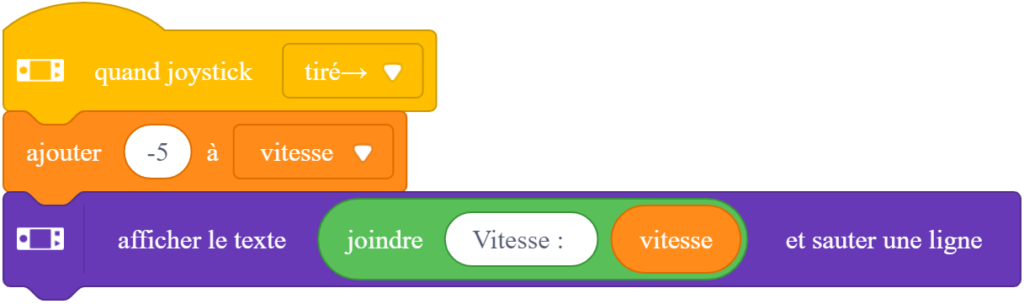
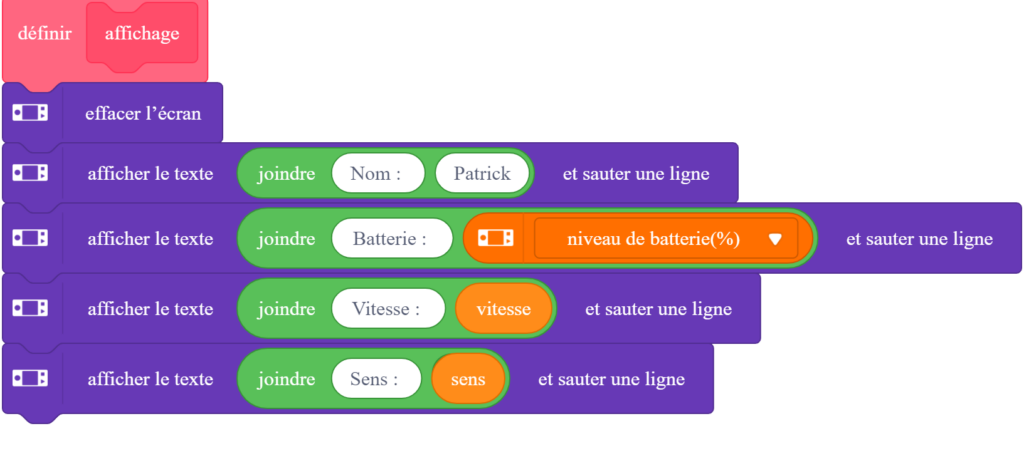
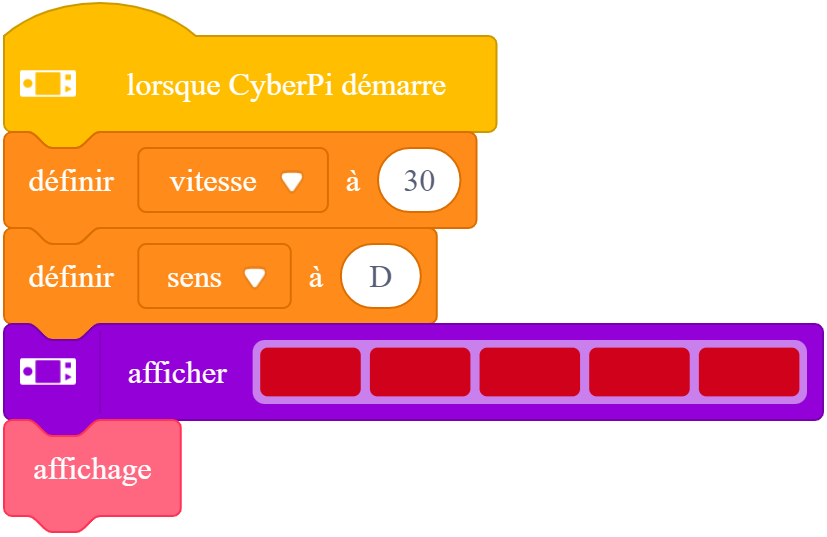
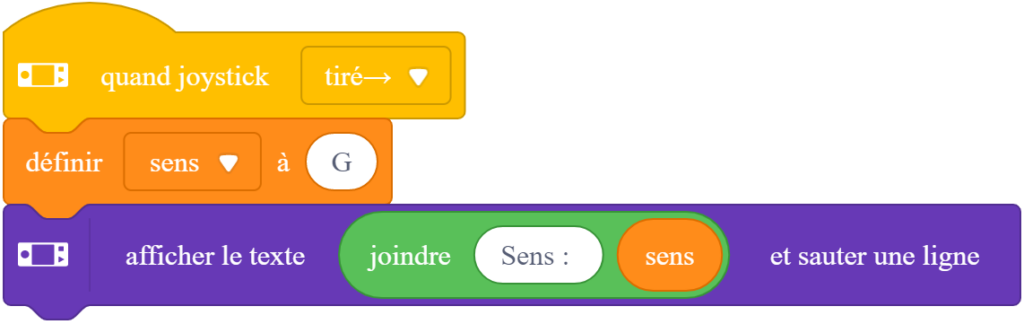
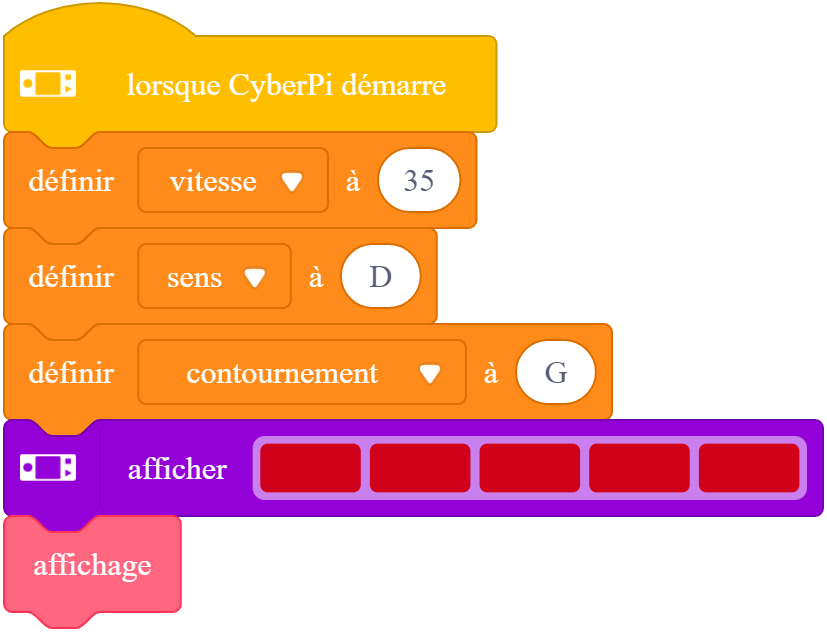
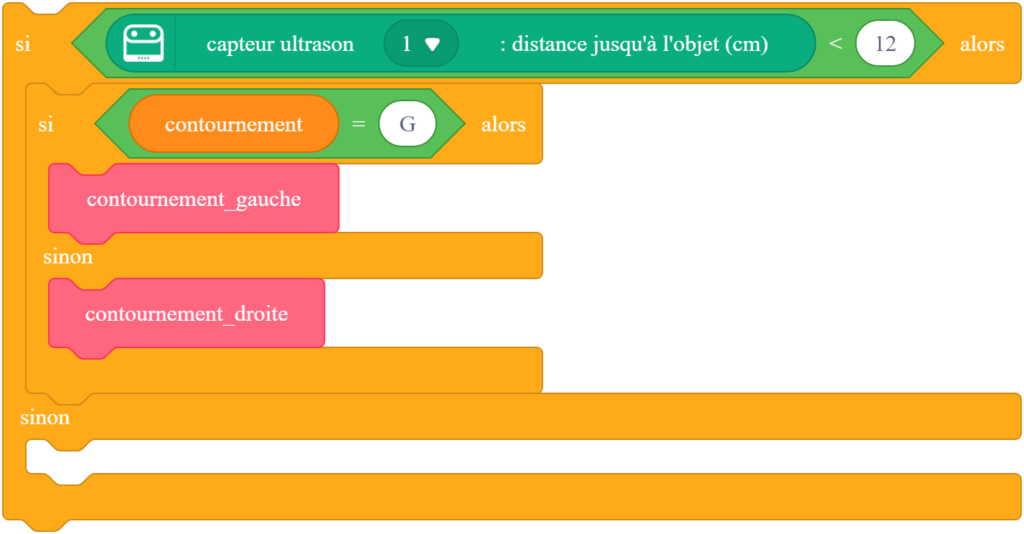
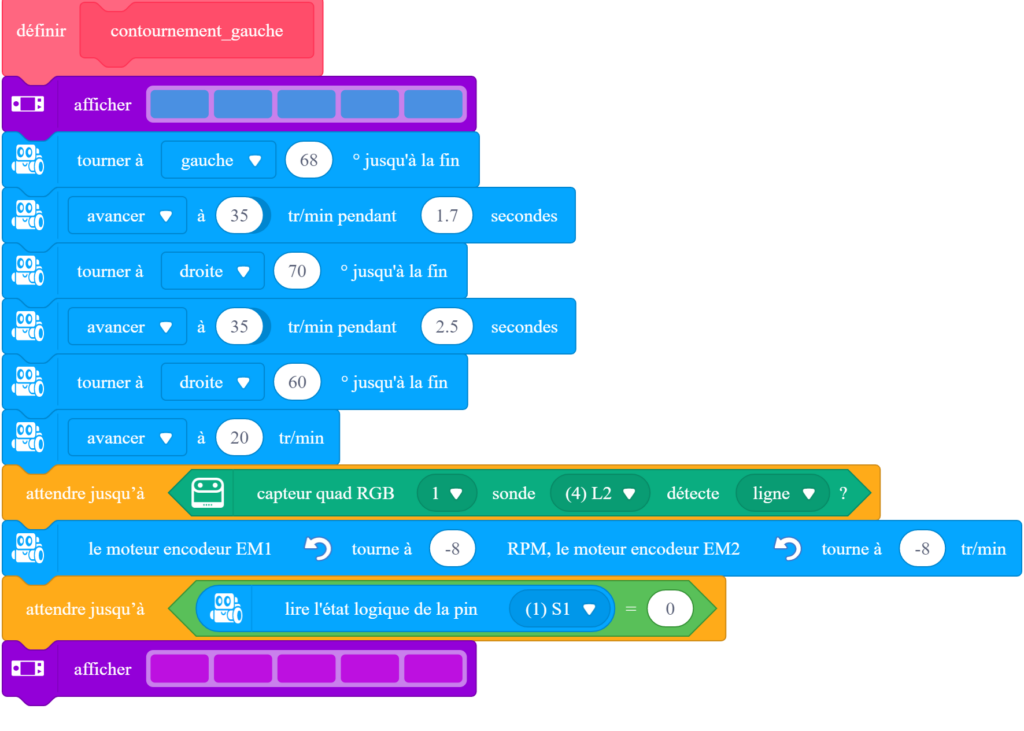
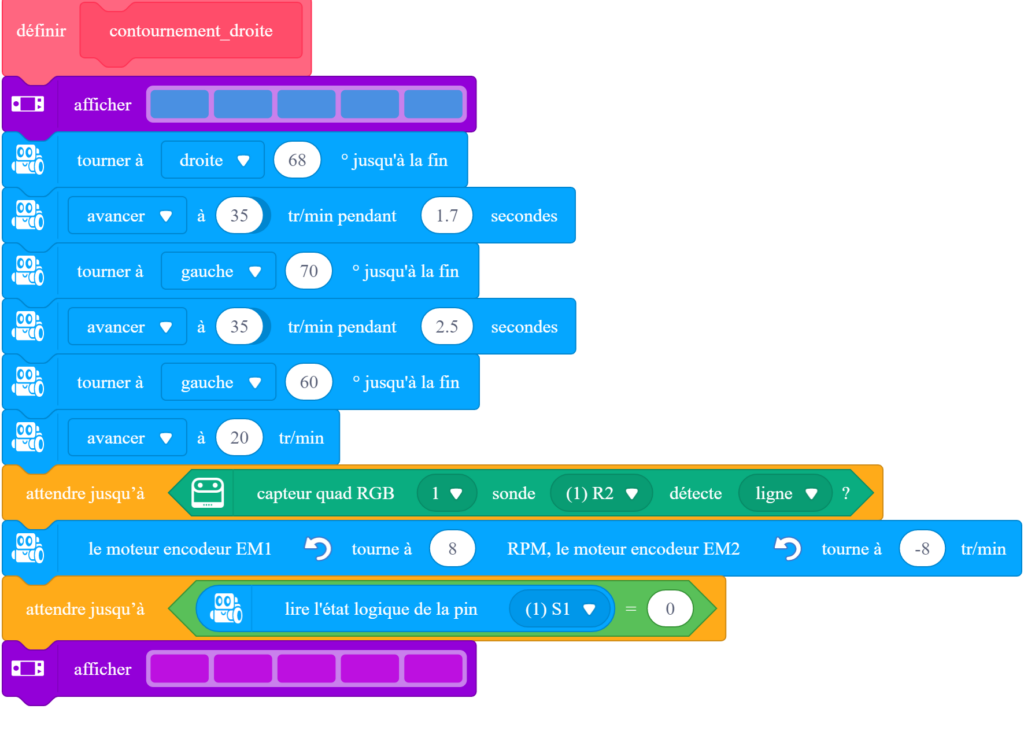
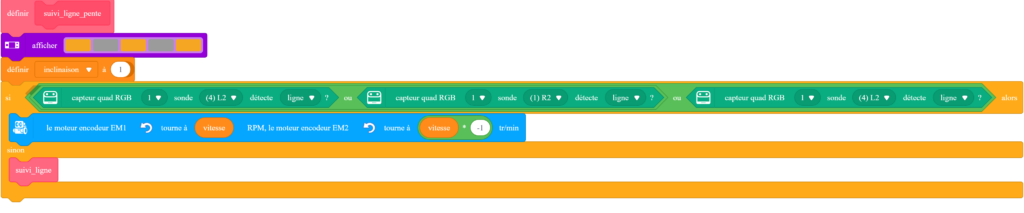
Les moins expérimentés se sont concentrés sur la programmation en mode block, ce qui leur a permis de comprendre les bases de la programmation et de la robotique. Ils ont travaillé sur des tâches simples mais essentielles, comme le déplacement du robot, la détection de couleurs et le suivi de ligne. Ils sont utilisés différents robots au plus simple jusqu’au MBOT :
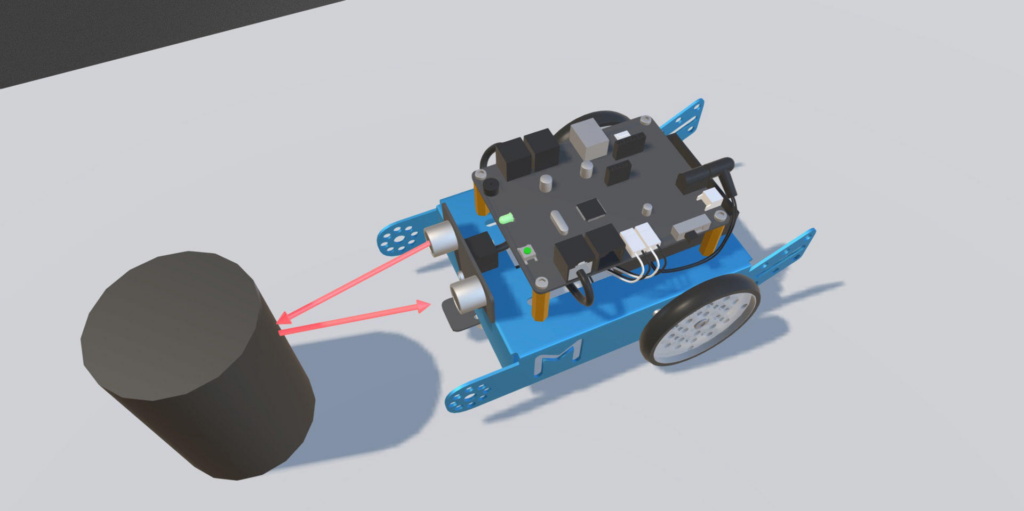
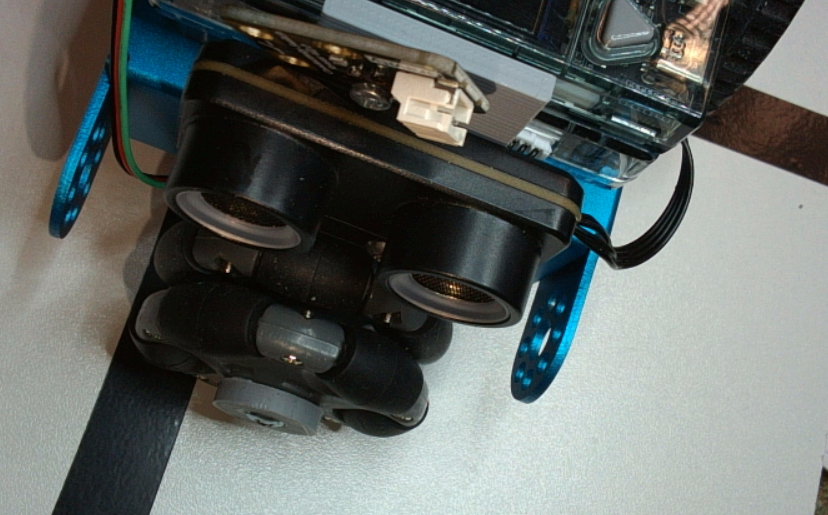
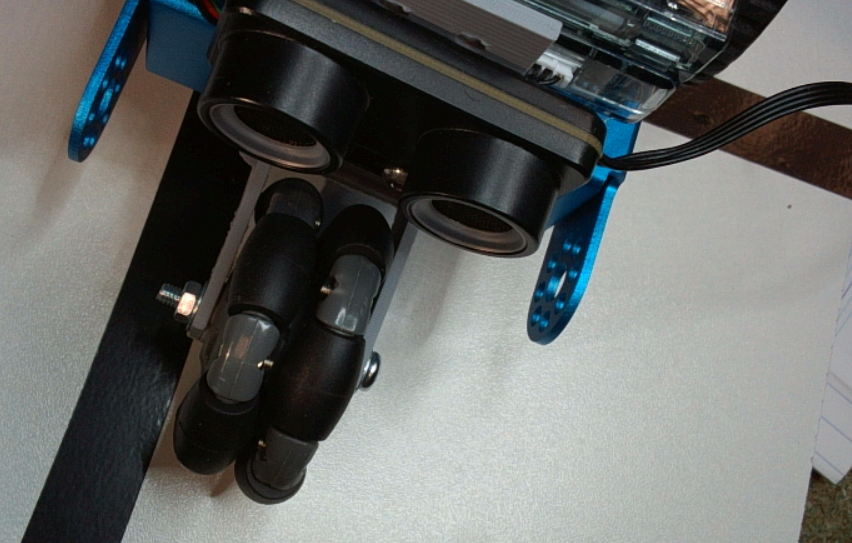
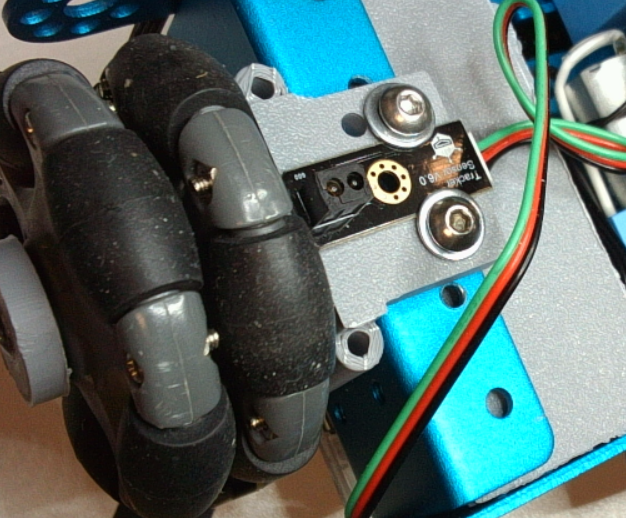
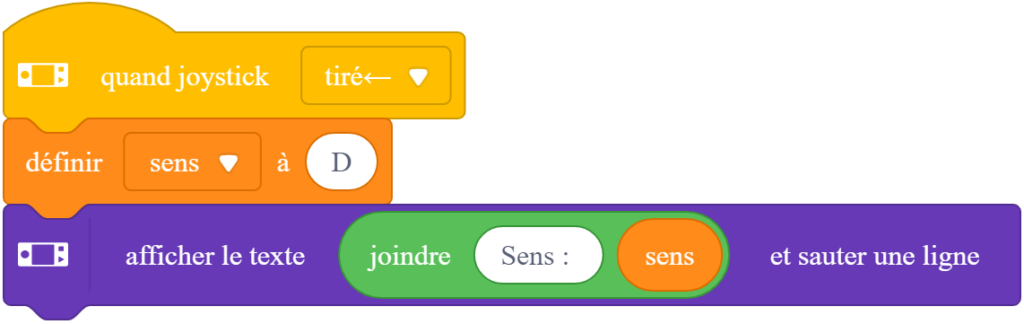
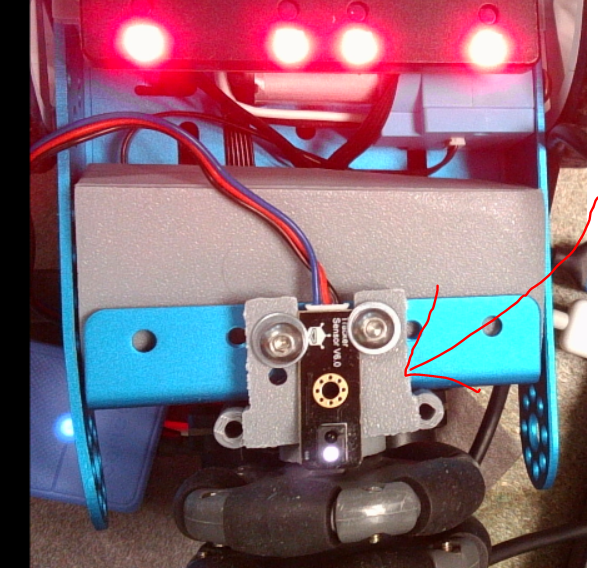
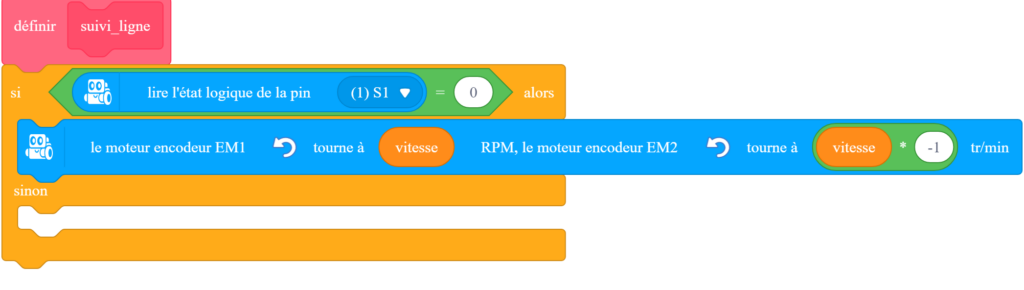
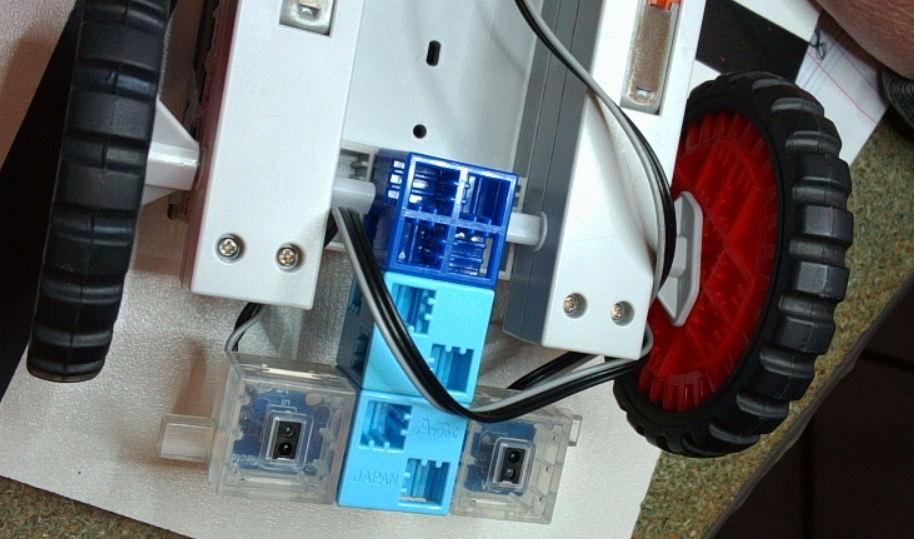
Un robot avec deux capteurs de suivi de ligne :

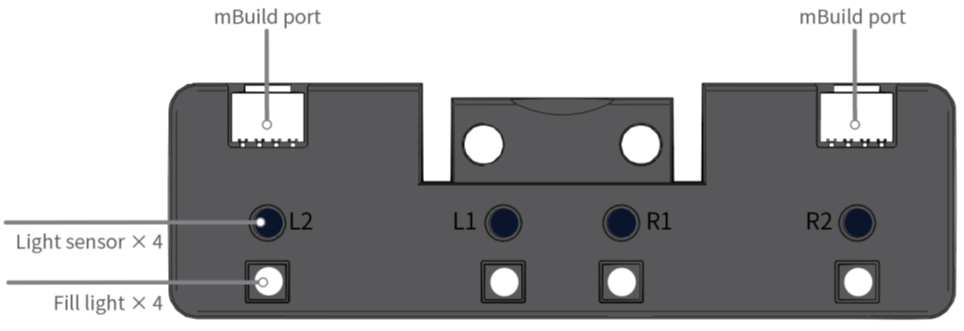
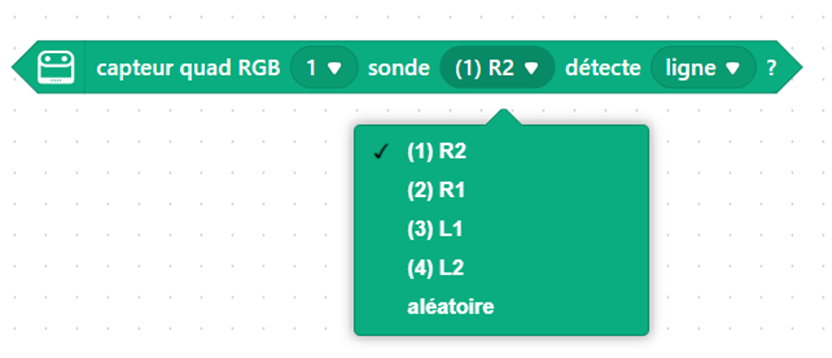
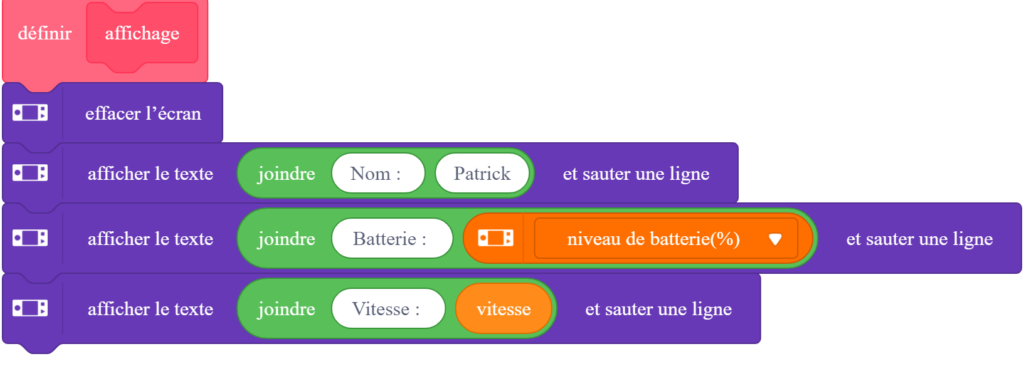
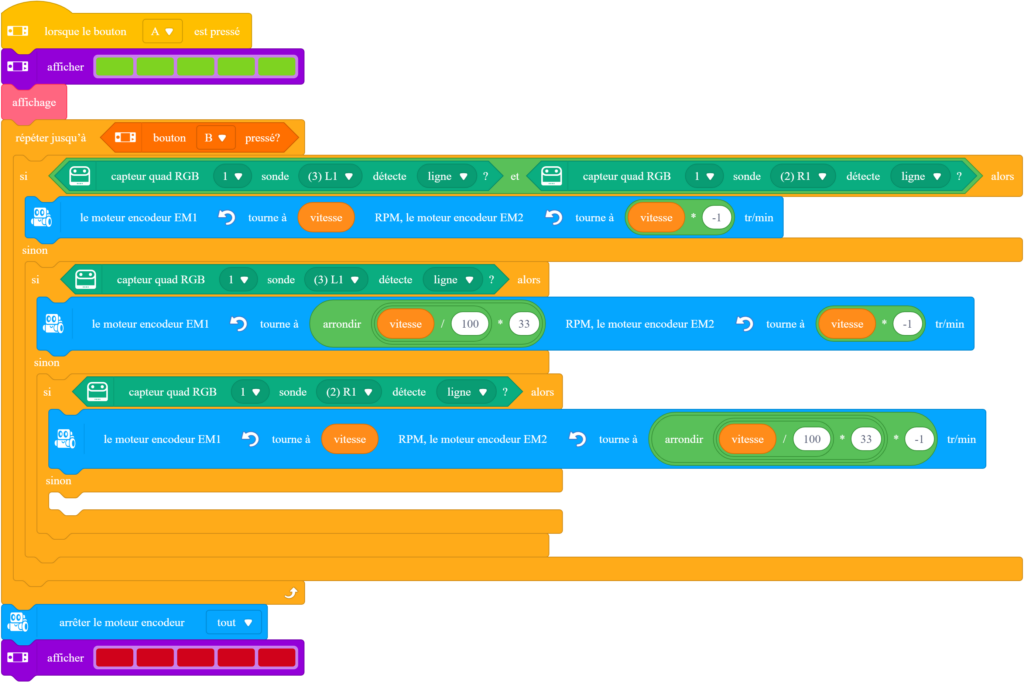
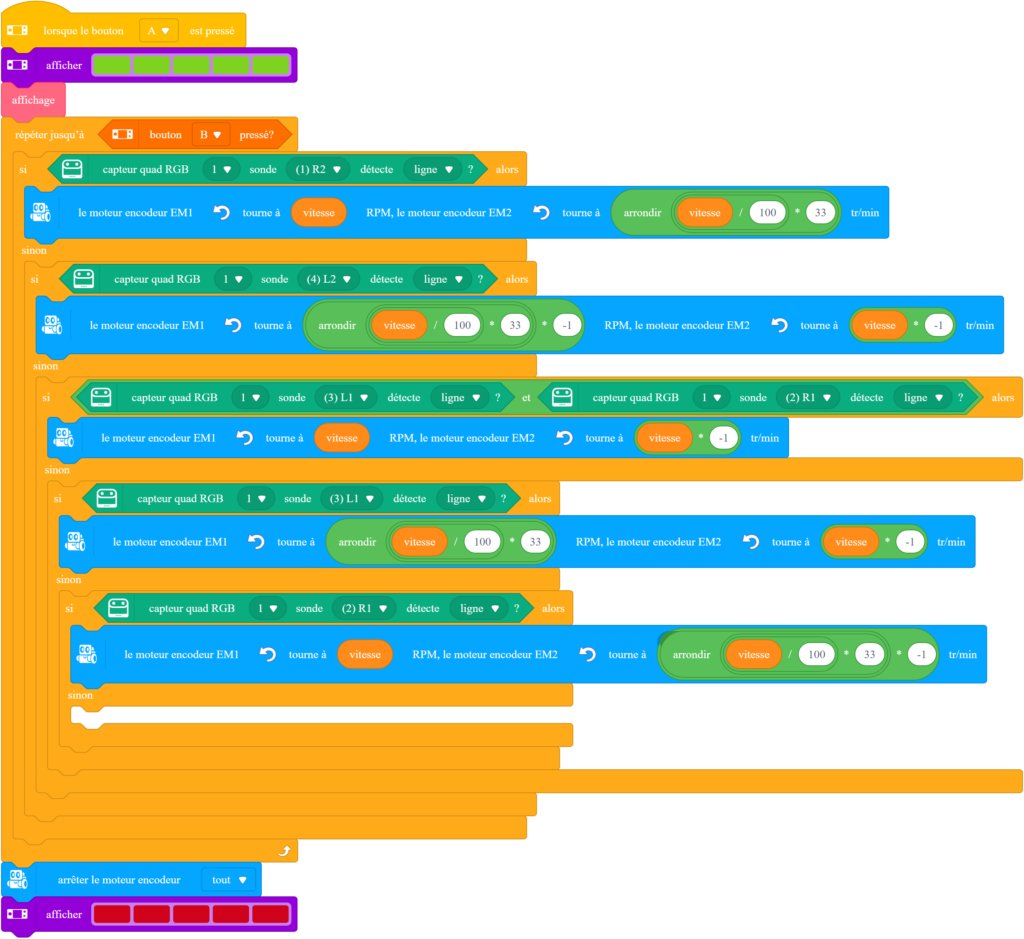
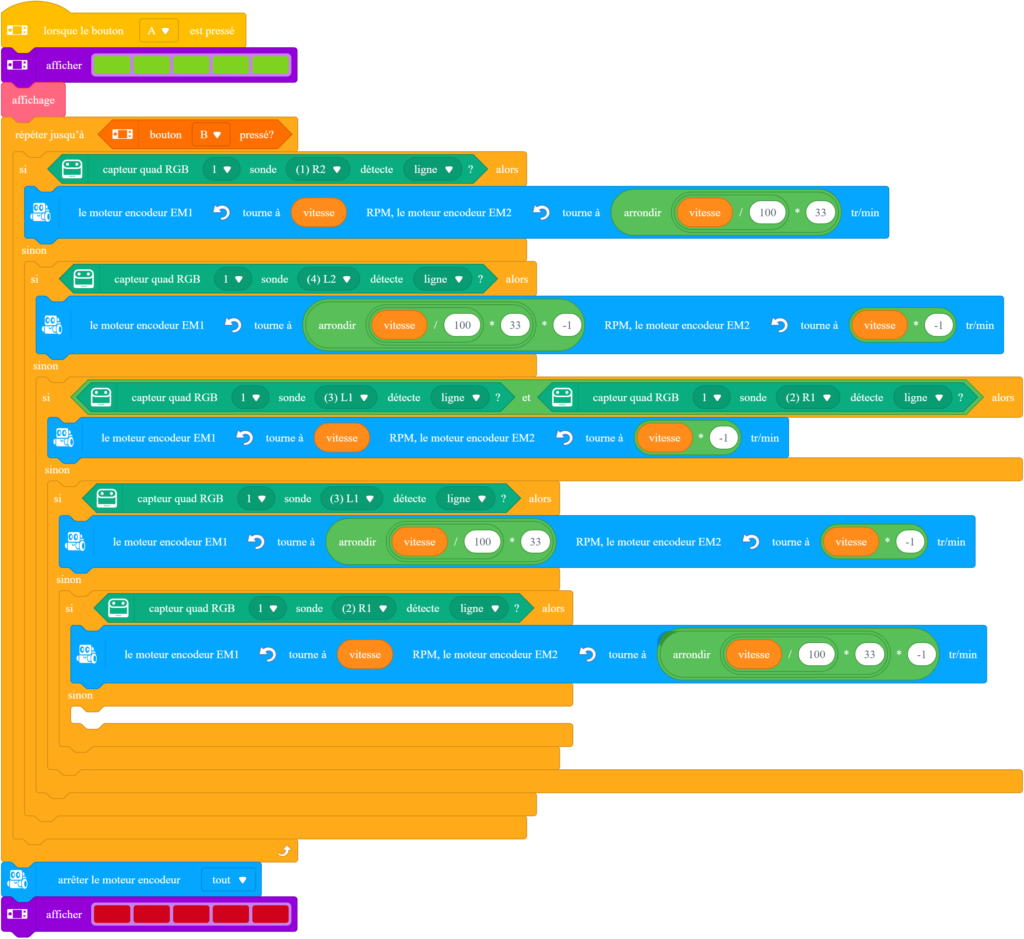
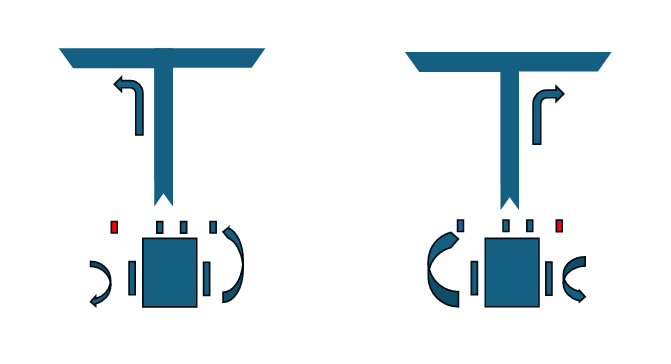
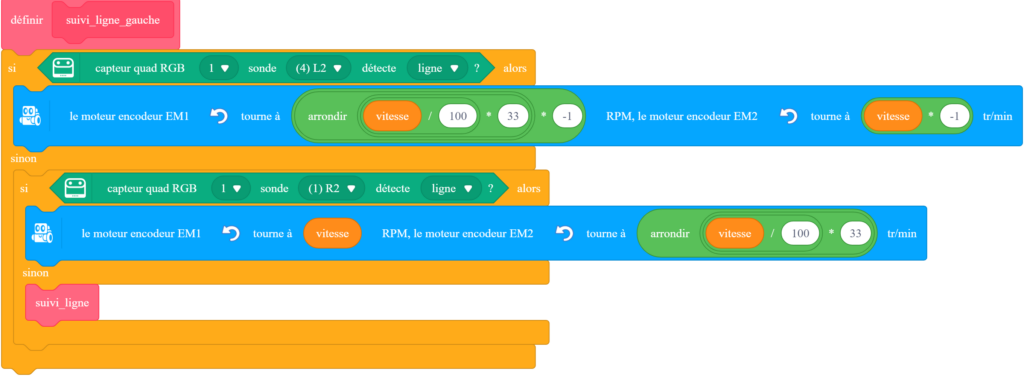
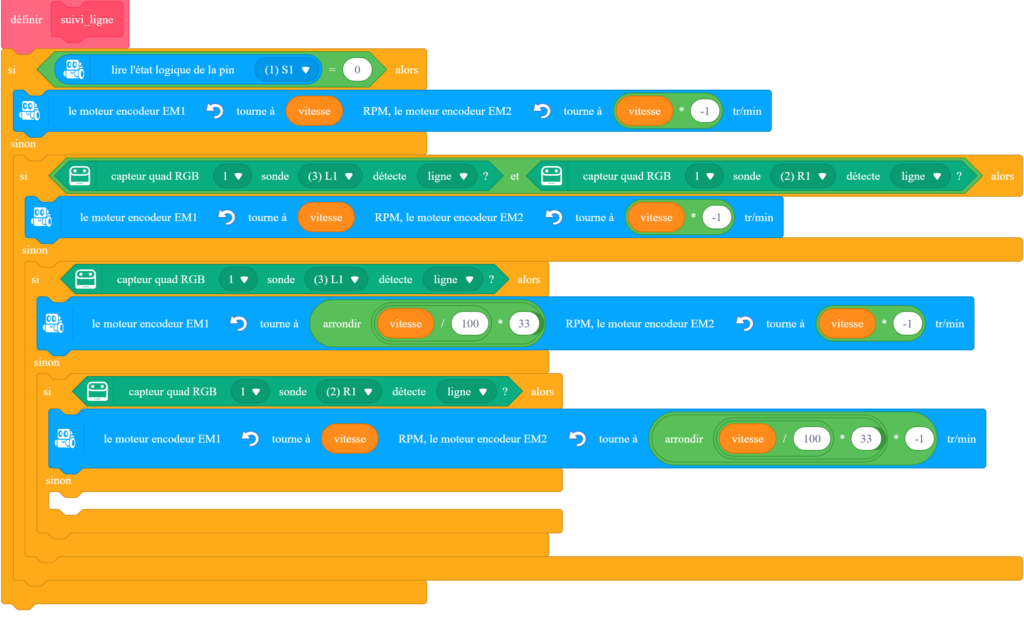
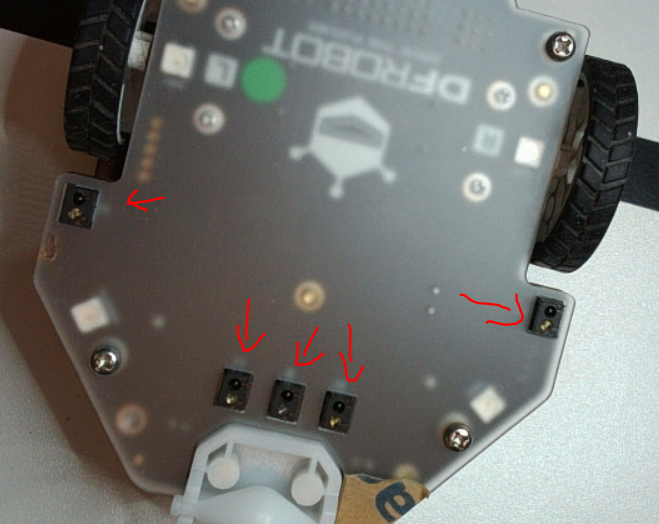
Puis un robot avec cinq capteurs de suivi de ligne
Travail des plus expérimentés
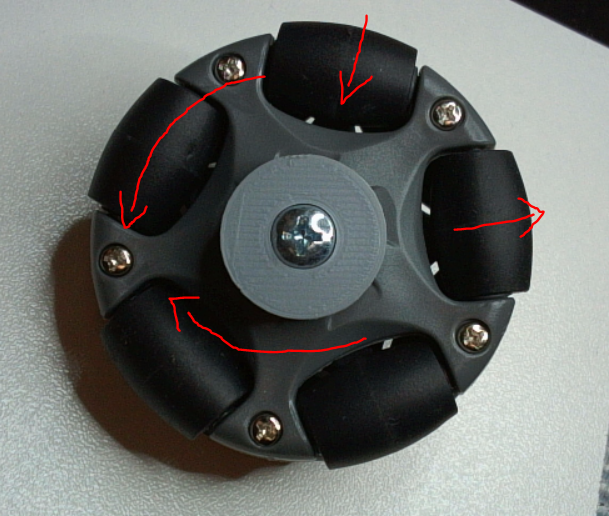
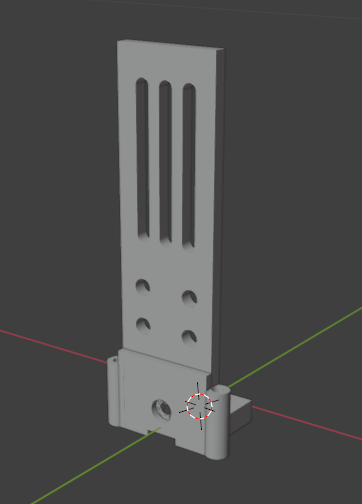
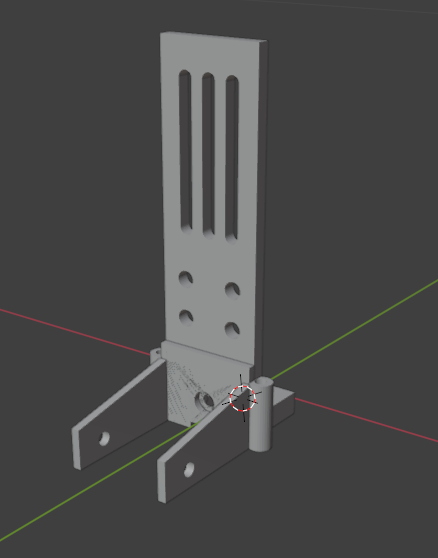
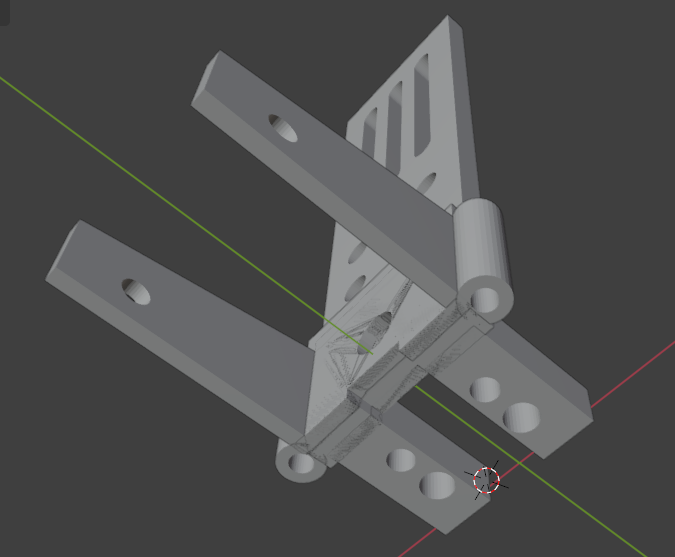
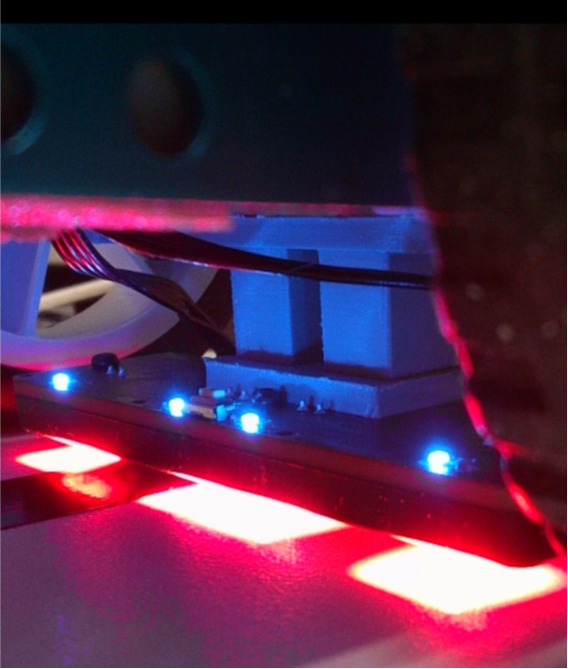
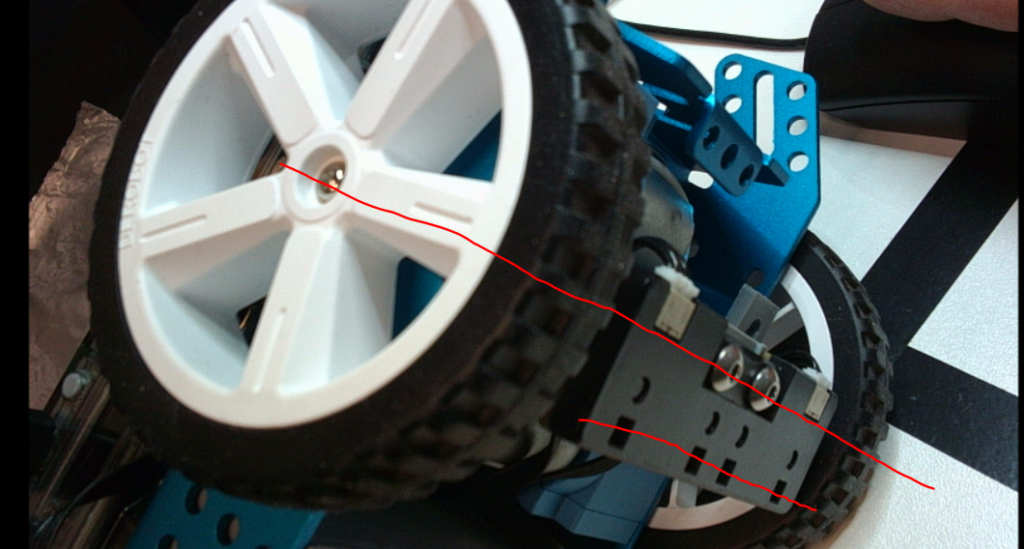
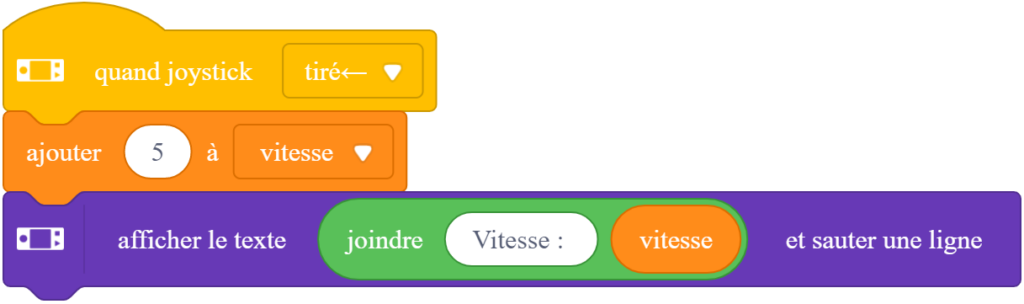
Les plus expérimentés ont pris en charge la compréhension des problématiques techniques et l’élaboration de solutions pour la conception des robots. Ils ont travaillé sur des aspects plus complexes, comme la gestion du capteur de ligne, l’équilibrage du robot et l’optimisation globale des performances du robot en fonction des exigences du parcours pour la compétition de la Robocup junior.
Collaboration et Tests
Travail en Commun entre les différentes équipes
Bien que les plus grands aient été principalement responsables de la conception technique, un travail en commun a été essentiel. Les solutions techniques élaborées par les plus grands ont été testées par tous les membres des équipes. Cela a permis de valider les solutions et de faire des choix éclairés sur les meilleures options à adopter.
Tests et Validation
Nous avons organisé des sessions de tests régulières où chaque équipe pouvait tester les solutions proposées. Les retours des plus jeunes ont été précieux pour ajuster et améliorer les solutions techniques. Cette collaboration a permis de s’assurer que les robots étaient performants et prêts pour la compétition.