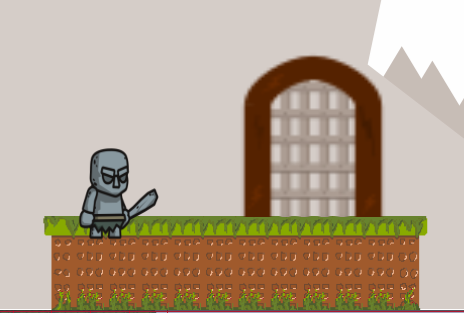
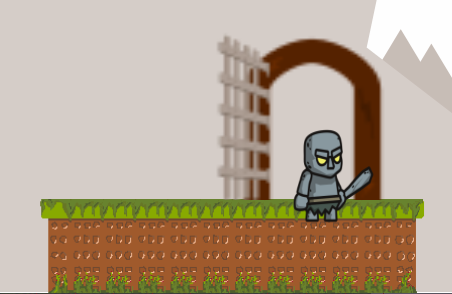
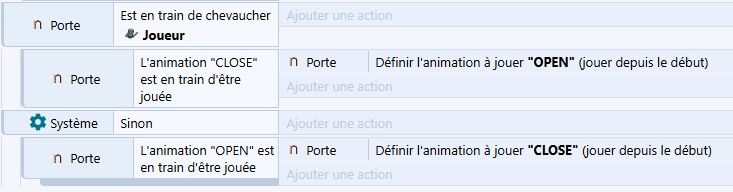
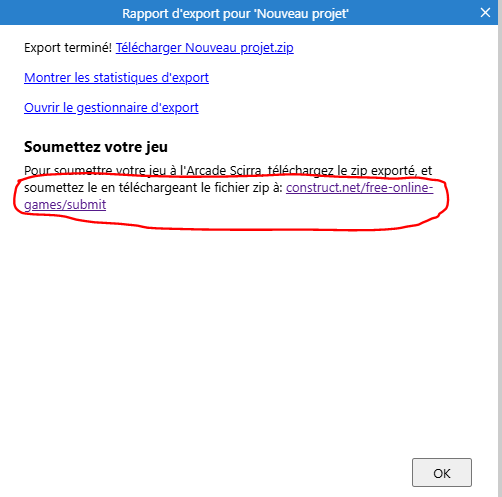
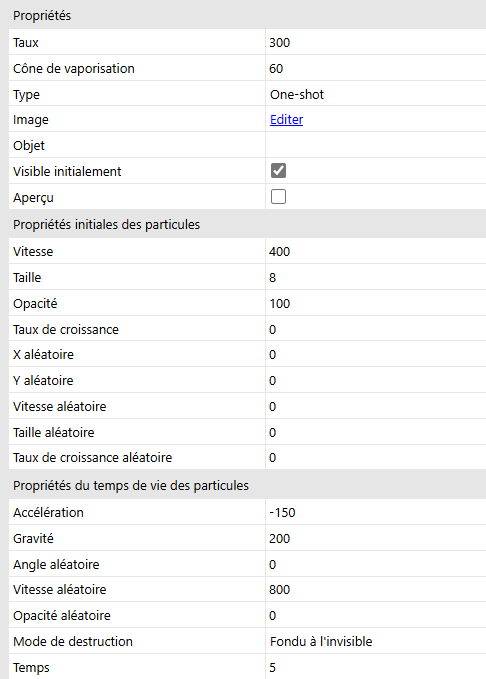
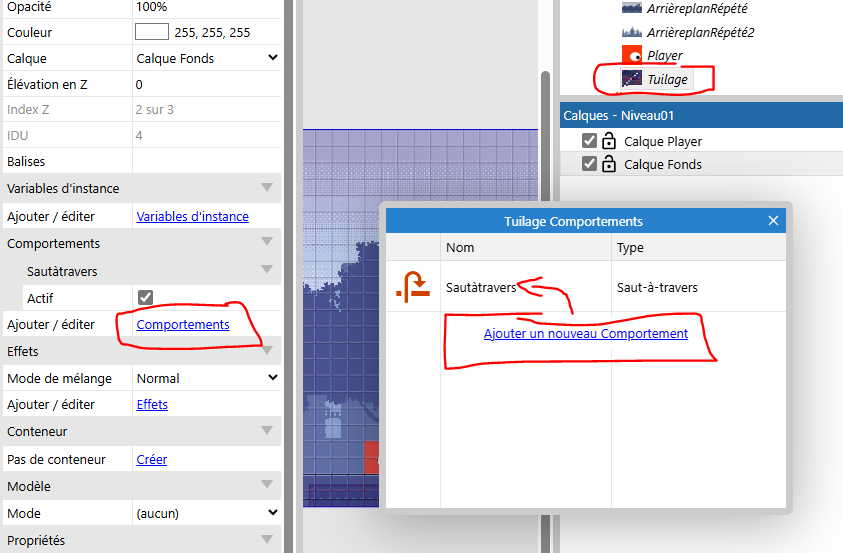
A l’approche du joueur la porte s’ouvre et se referme dès que le joueur s’éloigne :
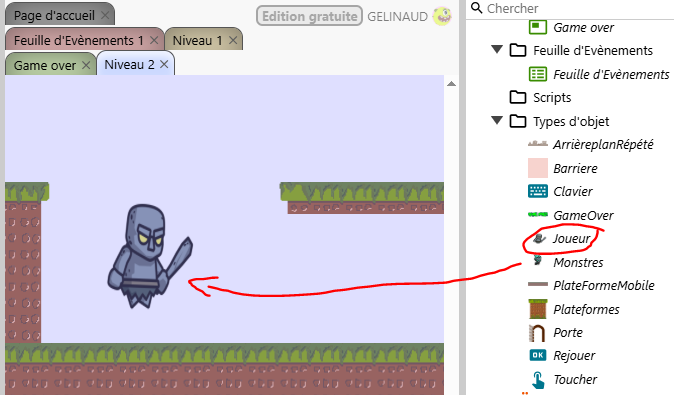
Tu te positionnes sur le calque Joueur :
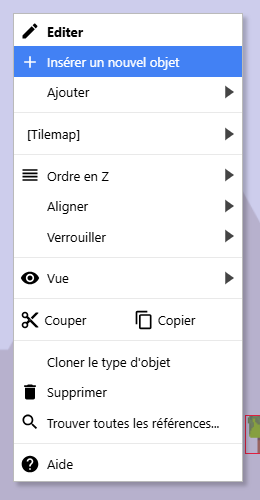
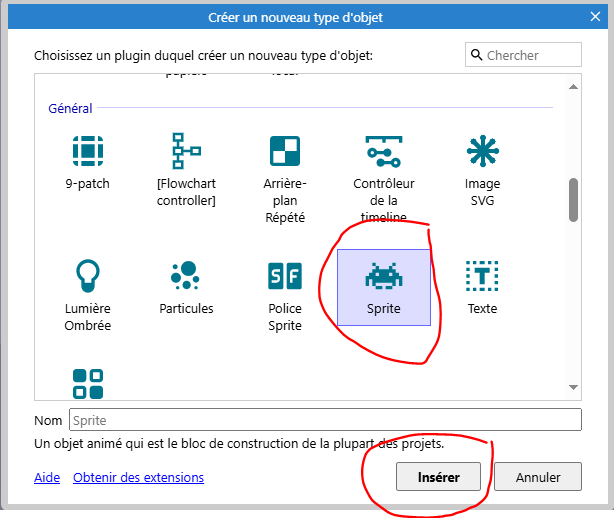
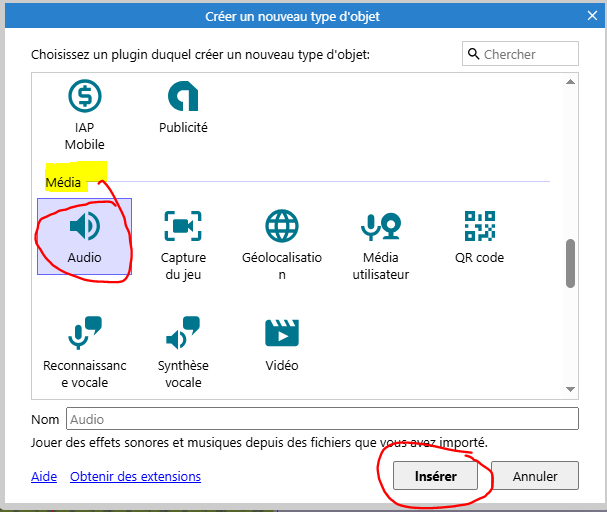
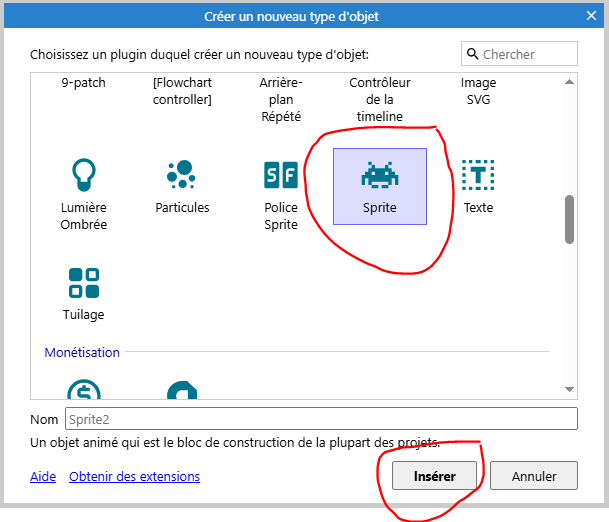
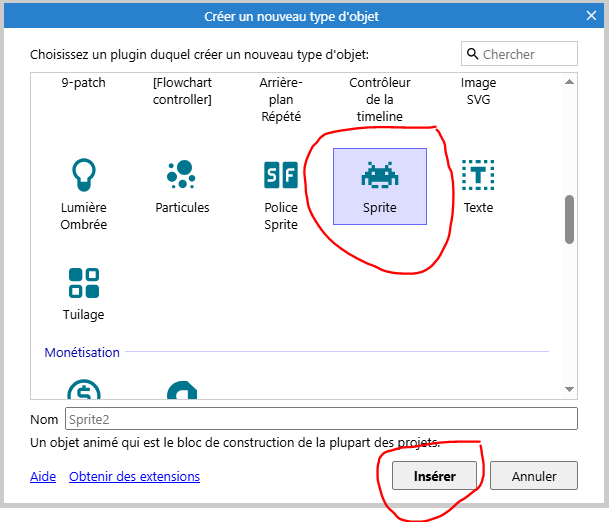
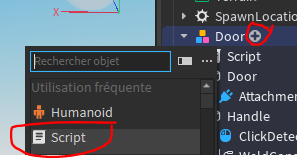
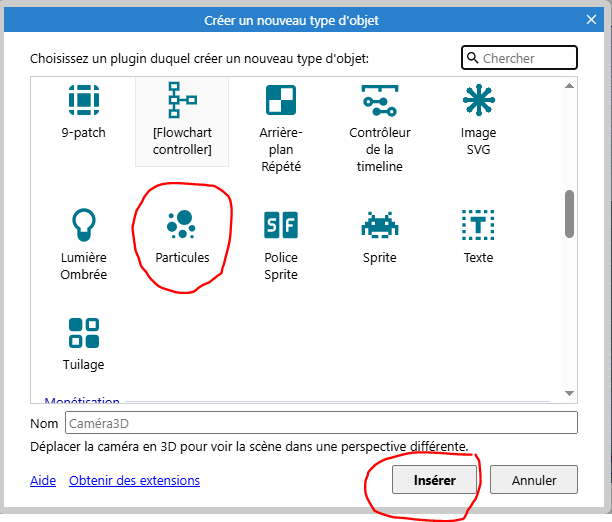
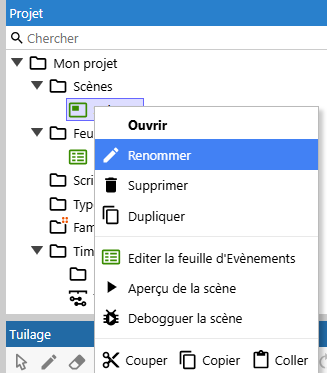
Clic droit sur la souris pour demander Insérer un nouvel objet :
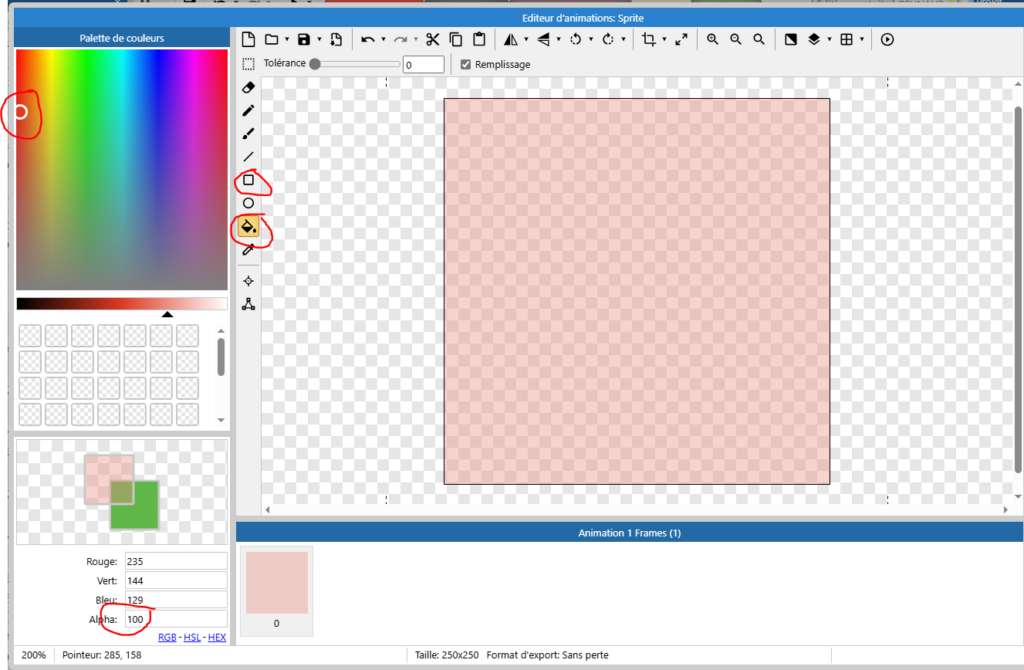
Crée des images de portes fermées et ouvertes, où choisis dans :
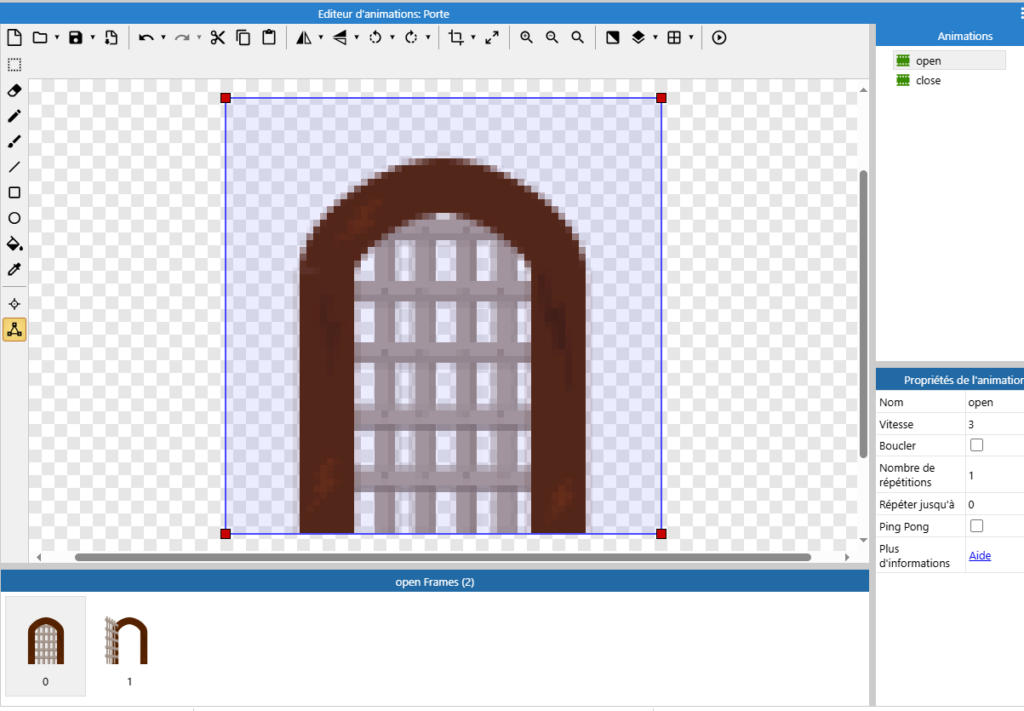
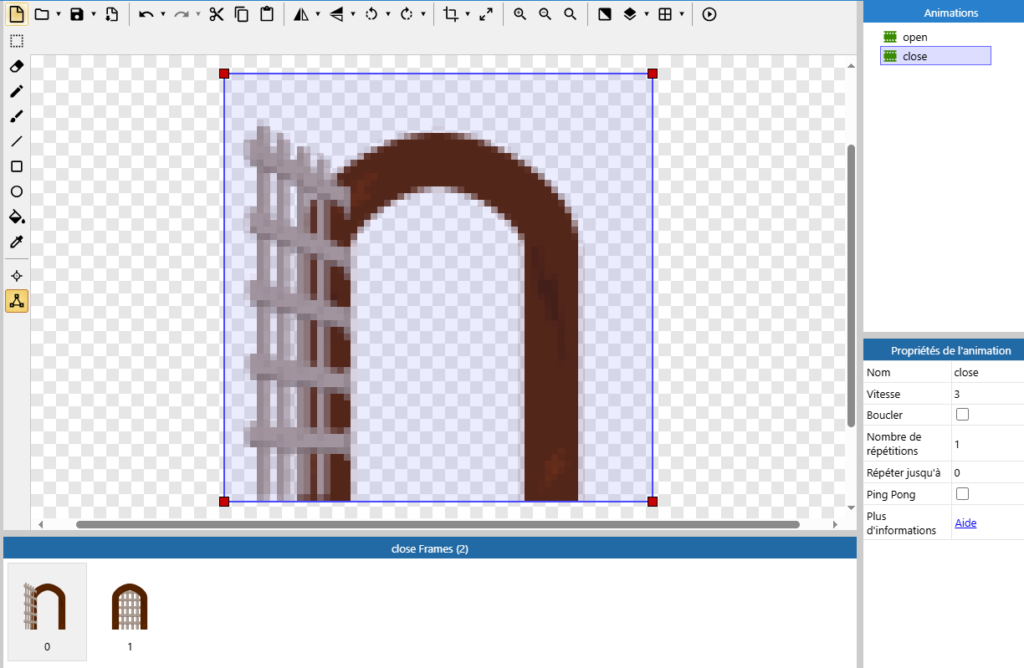
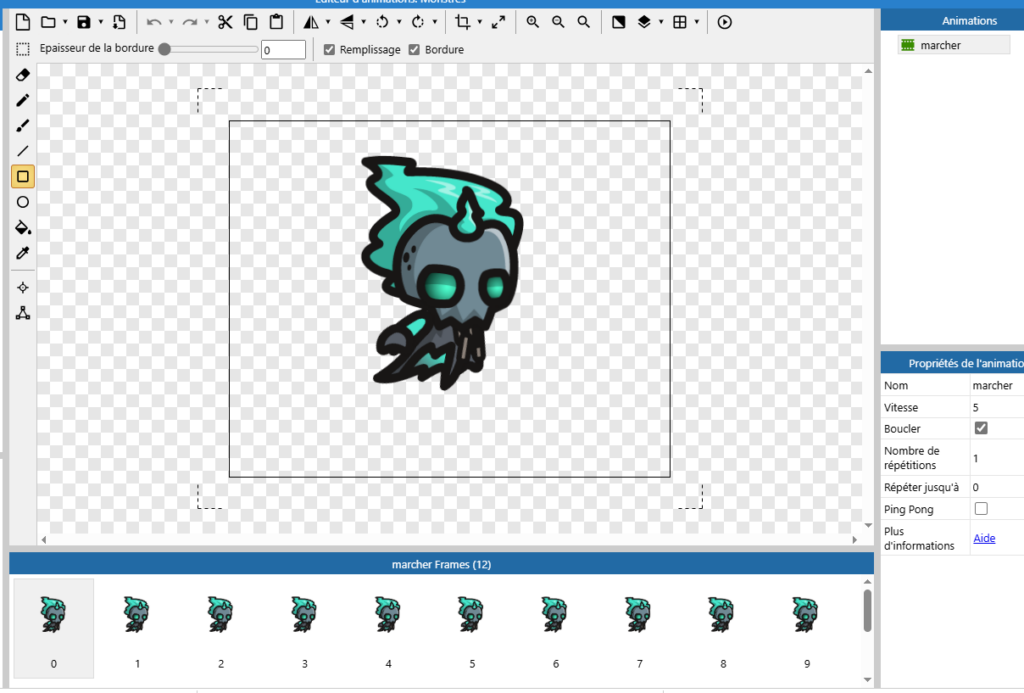
Sur ce sprite, crée deux animations : open et close :
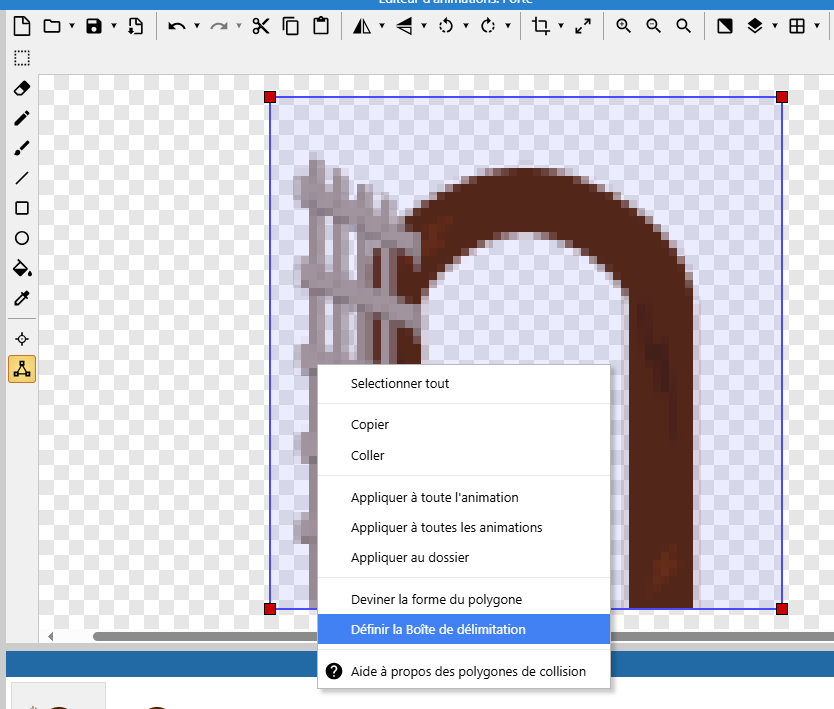
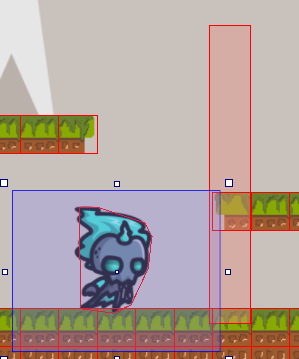
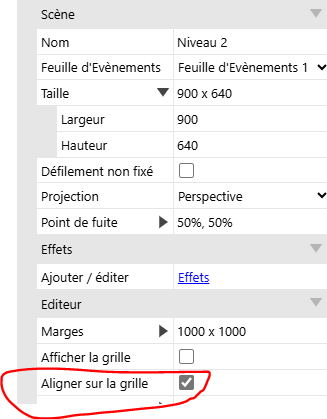
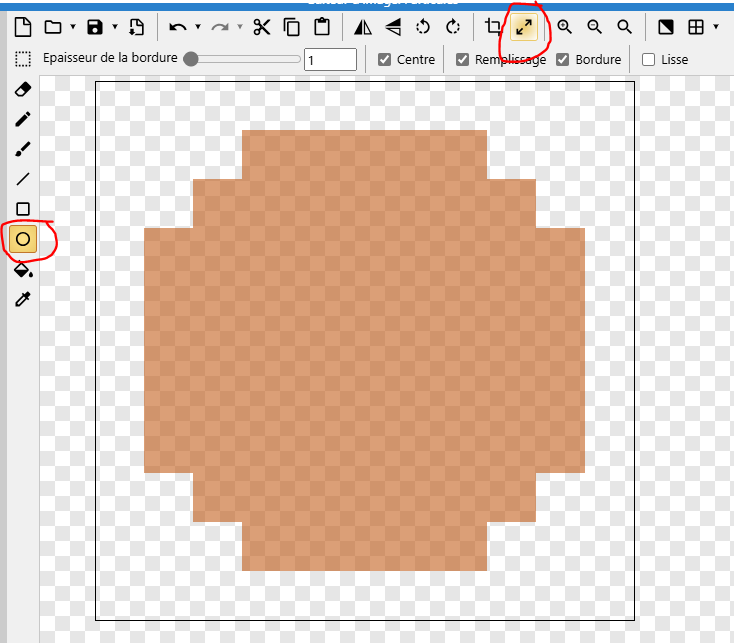
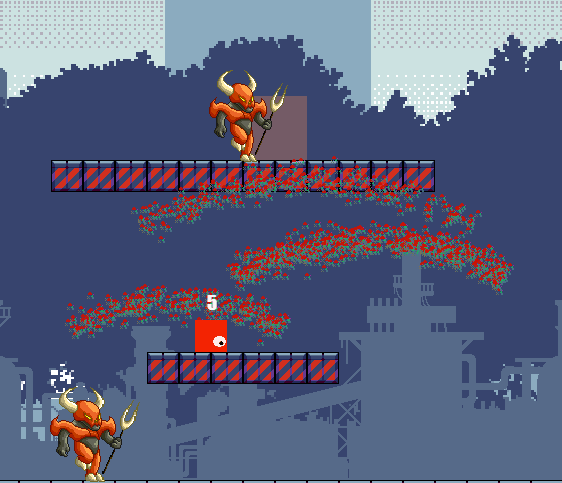
Tu vas redéfinir la zone de collision pour quelle soit la plus grande que possible et même dépasse la largeur de la porte. La largeur de la zone de collision permet le déclenchement automatique de l’ouverture de la porte.
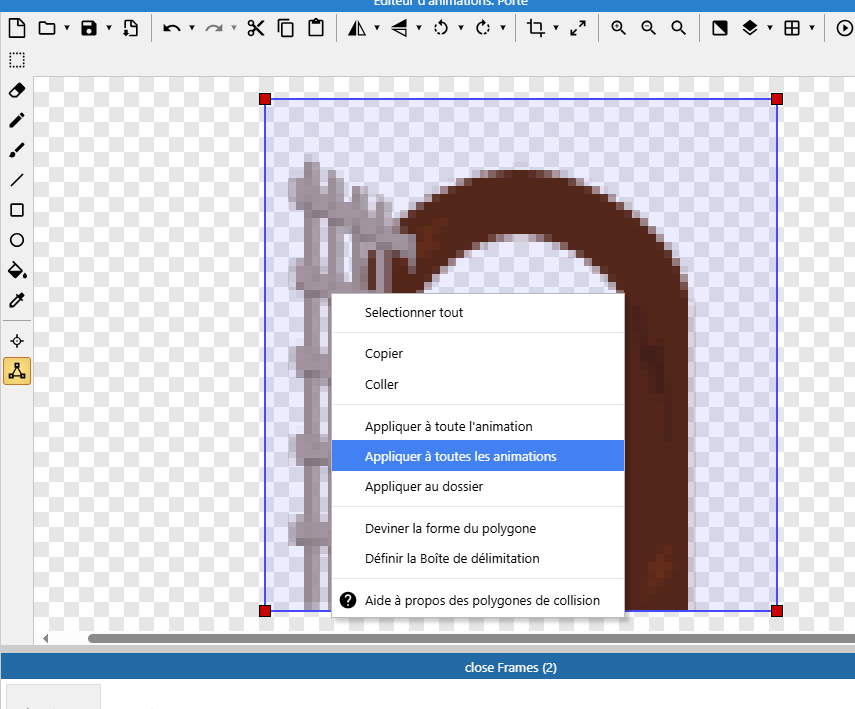
Puis applique ta nouvelle boite de collision à toutes les animations de la porte.
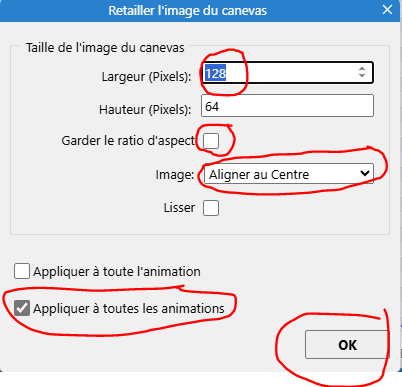
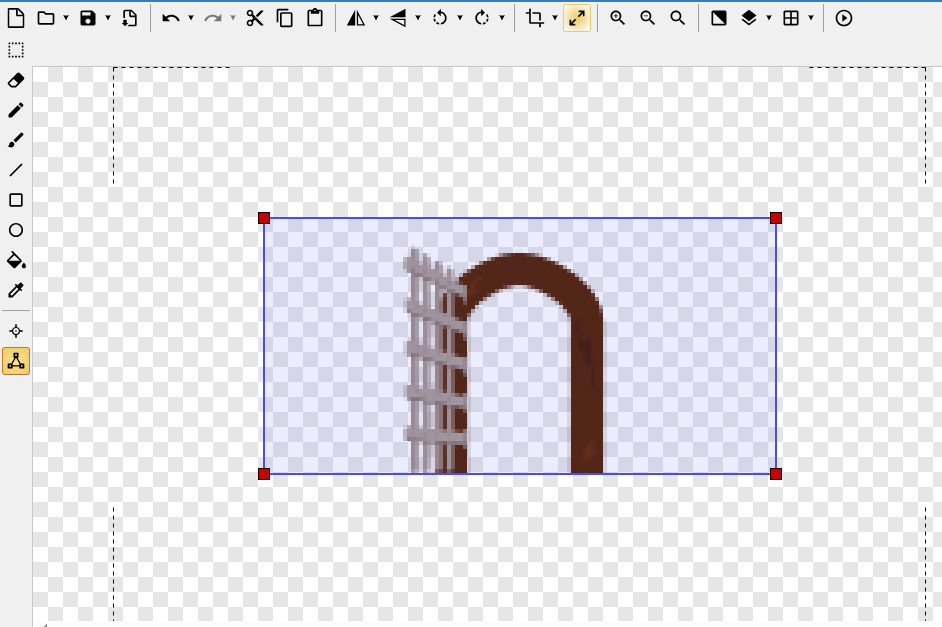
Tu peux agrandir la zone de collision en agrandissant la taille de ton image :
Redemande à redéfinir la zone de collision en fonction de la nouvelle taille de ton image :
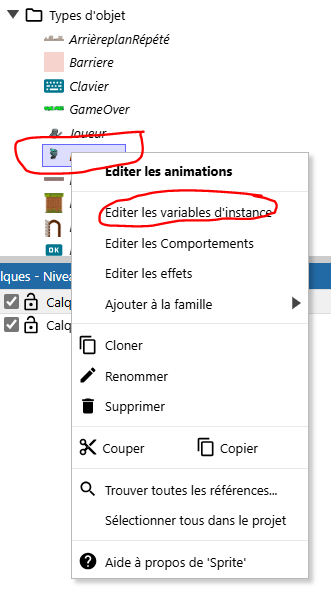
Pense à renommer ton sprite :
Maintenant dans ta feuille d’événements rajoute les instructions suivantes pour gérer l’ouverture de la porte en fonction de la proximité du joueur :
Un « obby » (course d’obstacle) est un type de jeu sur Roblox où les joueurs doivent traverser une série d’obstacles pour atteindre la fin. Voici un guide pour créer votre propre obby avec des critères spécifiques et des instructions détaillées pour chaque partie.
Critères :
Avoir au minimum 10 niveaux différents : Votre obby doit comporter au moins 10 niveaux uniques.
Respecter toutes les parties : Suivez toutes les instructions pour chaque partie.
Ne pas utiliser la tool-box pour les scripts ou certains obstacles : Évitez d’utiliser la tool-box pour les scripts et certains obstacles.
Avoir au minimum un script spécial : Incluez au moins un script spécial dans votre obby.
Objectif : Créer un lobby (zone de départ) où le joueur apparaîtra et le décorer.
Instructions :
Créer le lobby : Utilisez des « parts » (blocs) pour créer un espace où le joueur apparaîtra au début du jeu.
Décorer le lobby : Ajoutez des éléments décoratifs pour rendre le lobby attrayant.
Suggestion pour la suite
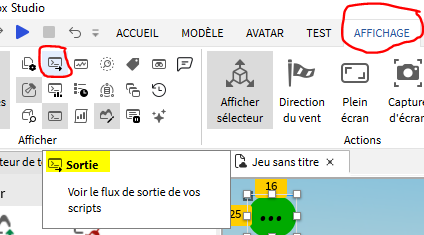
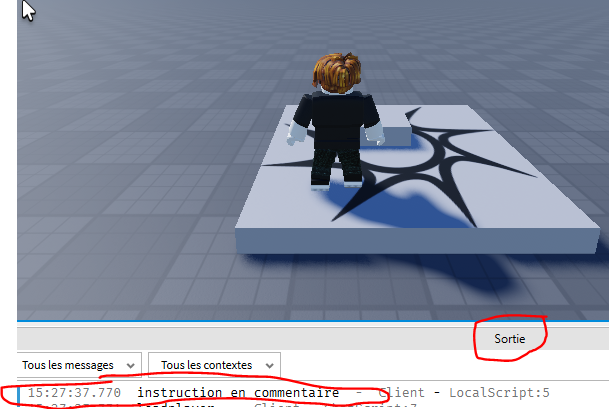
Pour t’aider, oublie pas d’utiliser la fenêtre de sortie et la possibilité de mettre des commentaires dans ton script :
Commentaire d’une ligne :
–print(« instruction en commentaire »)
Commentaire de plusieurs instructions :
–[[ print(« instruction en commentaire ») print(« instruction en commentaire ») –]]
Partie II : Niveau 1 du jeu – Système de Déplacement de Part par un menu
Objectif : Créer un système pour déplacer une part à droite et à gauche pour aider le joueur à finir le premier niveau.
Instructions :
Créer une part : Ajoutez une part et renommez-la.
Créer un « Screen Gui » : Dans « StarterGui », ajoutez un « Screen Gui » et placez une « Frame » à l’intérieur.
Système d’ouverture/fermeture : Créez deux boutons pour ouvrir et fermer la « Frame ».
Boutons de déplacement : Ajoutez deux boutons pour déplacer la part à droite et à gauche.
Indice : Utilisez [nom de la variable de la part].Position += Vector3.new(x, y, z) pour déplacer la part.
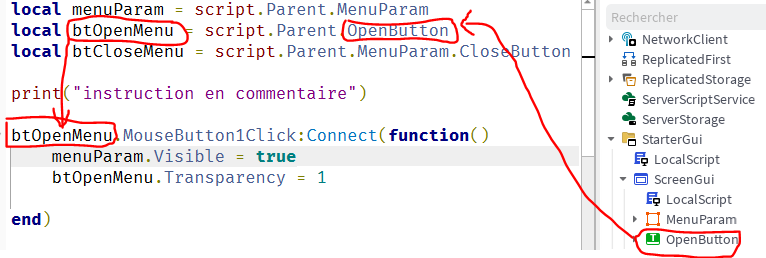
Comment indiquer une ressource dans un script :
local btOpenMenu = script.Parent.OpenButton
Comment détecter un click de la souris sur un bouton :
btOpenMenu.MouseButton1Click:Connect(function()
end)
Comment déplacer un objet Roblox :
myPart.Position += Vector3.new(10,0,0)
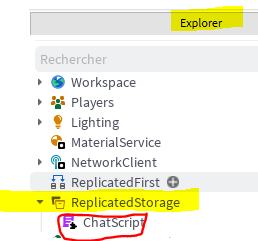
Gérer les niveaux, afficher dans le chat du joueur son niveau :
Rajouter un script ChatScript sous ReplicatedStorage :
Puis coder dans ce script :
local ChatScript = {}
function ChatScript.sendMessage(player, message)
local character = player.Character or player.CharacterAdded:Wait()
if character then
local head = character:WaitForChild("Head")
if head then
game:GetService("Chat"):Chat(head, message)
end
end
end
return ChatScript
Rajouter dans votre script qui gère votre interface les instructions suivantes lorsque le joueur referme la fenêtre :
local chat = require(game.ReplicatedStorage.ChatScript)
chat.sendMessage(player, "niveau : 1")
Partie III : Niveau 2 – Parts Mobiles
Objectif : Faire en sorte qu’une ou plusieurs parts bougent continuellement.
Instructions :
Ajouter des parts mobiles : Dans un de vos niveaux, ajoutez des parts qui bougent.
Indice : Utilisez while true do et for i = 1, x do pour créer un mouvement continu.
Déplacer un objet x fois :
for i = 1, 50 do maPart.Position += Vector3.new(5,0,0) wait(1) end
Déplacer un objet Roblox tout le temps :
while true do maPart.Position += Vector3.new(0.05,0,0) wait(0.01) end
Déplacer un objet jusqu’à une position :
while maPart.Position.X<60 do maPart.Position += Vector3.new(5,0,0) wait(0.01) end
Synchroniser le déplacement avec le moteur de Roblox :
clickDetector.MouseClick:Connect(function() if level1.Part01.Transparency == 1 then level1.Part01.Transparency = 0 else level1.Part01.Transparency = 01 end level1.Part01.CanCollide = not level1.Part01.CanCollide end)
Script pour faire apparaître/disparaître un niveau de jeu :
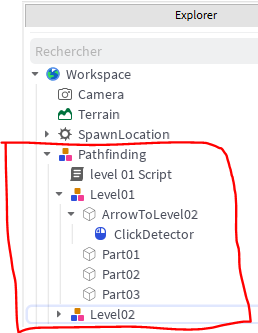
local clickDetector = script.Parent.ClickDetector local level1 = workspace.Pathfinding.Level01
for , level in level1:GetChildren() do level.Transparency = 1 level.CanCollide = false end
clickDetector.MouseClick:Connect(function() for _, level in level1:GetChildren() do level.Transparency = level.Transparency == 1 and 0 or 1 level.CanCollide = not level.CanCollide end end)
Partie VI : Pathfinding (recherche de chemin) avec des Parts
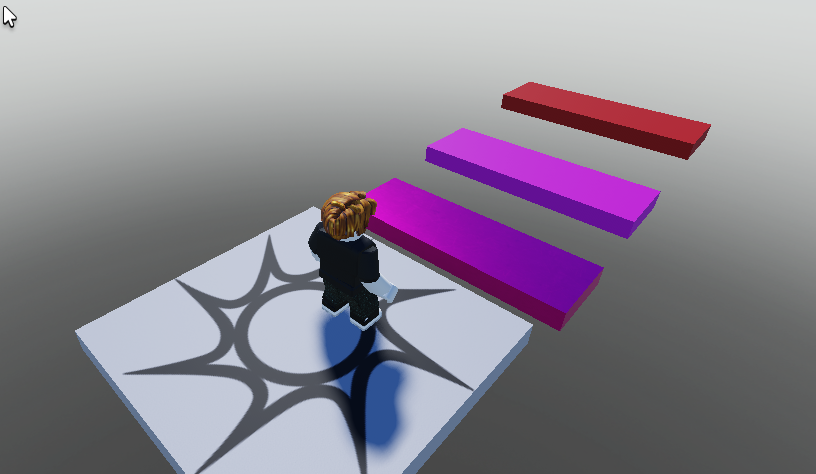
Objectif : Créer un chemin de parts où le joueur doit sauter au bon moment pour passer à la prochaine part.
Instructions :
Créer 3 parts : Ajoutez des parts et renommez-les.
Créer un patherme : Disposez les parts de manière à ce que le joueur doive sauter au bon moment pour passer à la suivante.
Indice : Utilisez la Transparency pour rendre certaines parts invisibles.
Indice : supprimer l’objet baseplate
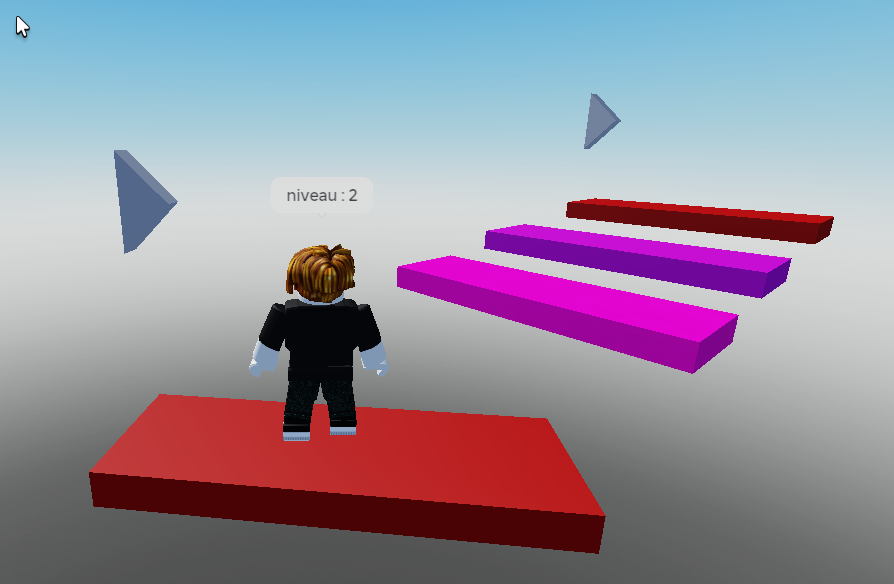
Exemple de Pathfinding avec deux niveaux :
Exemple pour passer à un niveau 2 :
Exemple de script pour faire apparaître le niveau 2 lors du clic sur le ClickDetector:
local clickDetector = script.Parent.Level01.ArrowToLevel02.ClickDetector
— récupération de tous les parts du niveau 2 local levels = script.Parent.Level02:GetChildren()
— récupération du système de chat local chat = require(game.ReplicatedStorage.ChatScript)
-- envoie du message au chat du joueur
chat.sendMessage(otherPart, "niveau : 2")
-- rendre visible tous les objets du niveau 2
for _, level in levels do
level.Transparency = 0
end
end)
Partie VII : Labyrinthe avec Portes Temporisées
Objectif : Créer un labyrinthe avec des portes qui s’ouvrent temporairement.
Instructions :
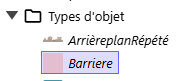
Créer un labyrinthe : Utilisez des parts pour créer un labyrinthe.
Ajouter une porte : Ajoutez une part et renommez-la.
Créer un bouton : Ajoutez une autre part qui servira de bouton.
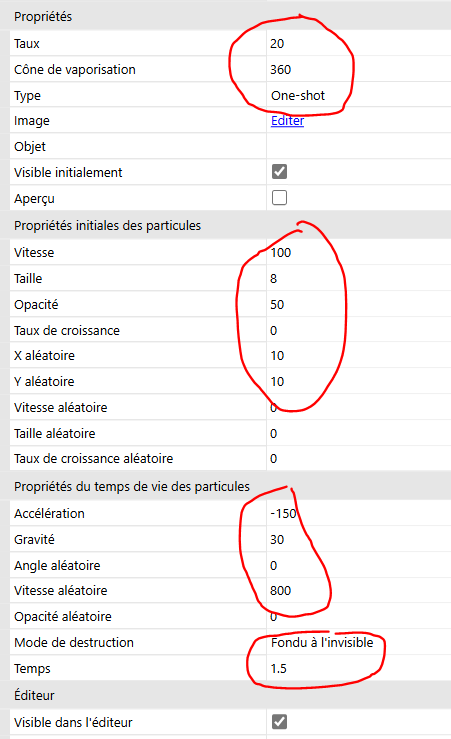
Script de porte temporisée : Lorsque le joueur appuie sur le bouton, il a un nombre de secondes « x » pour passer la porte, sinon elle se referme.
Condition : La porte doit s’ouvrir soit vers les côtés, soit vers le haut en animation.
Ajouter 3 portes : Créez au moins 3 portes comme cela dans le même script.
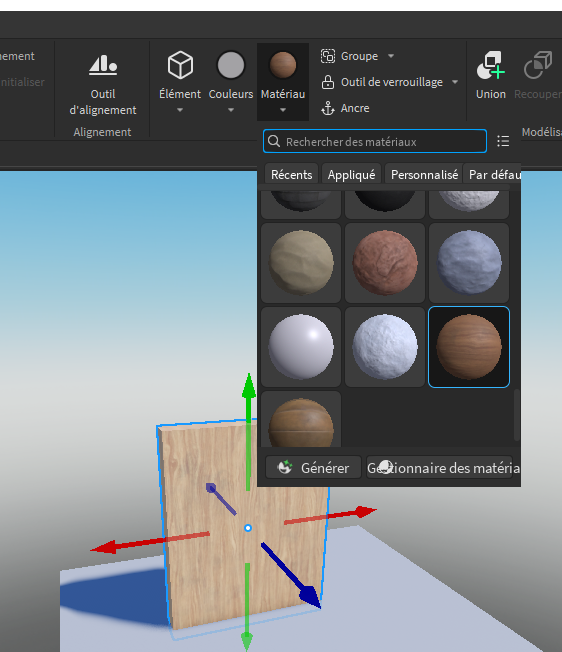
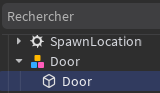
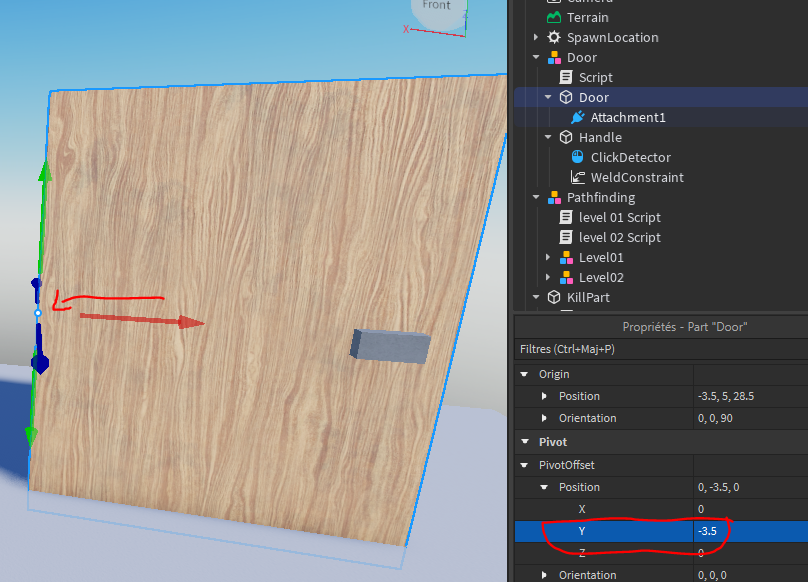
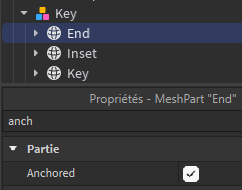
Créez une porte à partir d’un part :
Rangez le part et renommez le dans l’explorateur :
Puis créez avec un part une poignée :
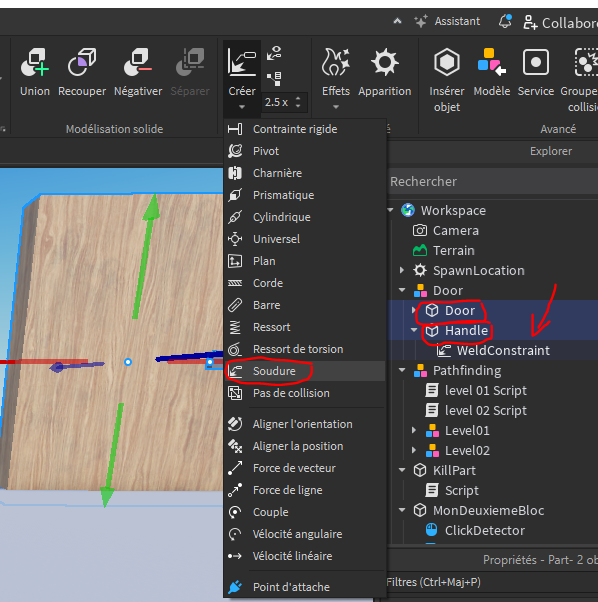
Créez une contrainte rigide entre la porte et la poignée :
Sélectionnez la poignée puis la porte puis demande une « soudure » entre les deux éléments :
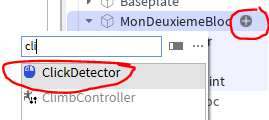
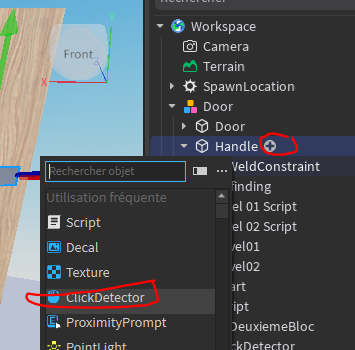
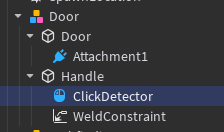
Demandez un clickDetector sur la poignée :
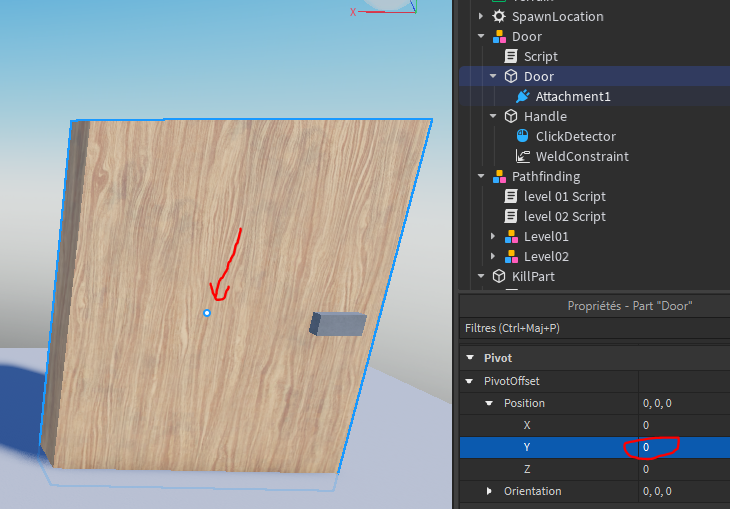
Modifiez le pivot de la porte :
Créez un script pour ouvrir la porte :
local clickDetector = script.Parent.Handle.ClickDetector local door = script.Parent.Door
local function doorRotation(door, push, rotation) if push ~= 0 then for i = 1, (rotation//math.abs(push)) do door:PivotTo(door:GetPivot() * CFrame.Angles(math.rad(push), 0, 0)) wait(0.01) end end
Refermez la porte au bout de x secondes, rajouter ces deux instructions :
task.wait(5) doorRotation(door, -1, 90)
Modifier le script pour déplacer la porte vers le haut :
local clickDetector = script.Parent.Handle.ClickDetector local door = script.Parent.Door
local distance = clickDetector.MaxActivationDistance
local function doorPushUp(door, push) door.CFrame += Vector3.new(0,push,0) while door.CFrame.Position.Y>5 and door.CFrame.Position.Y<15 do wait(0.01) door.CFrame += Vector3.new(0,push,0) end end
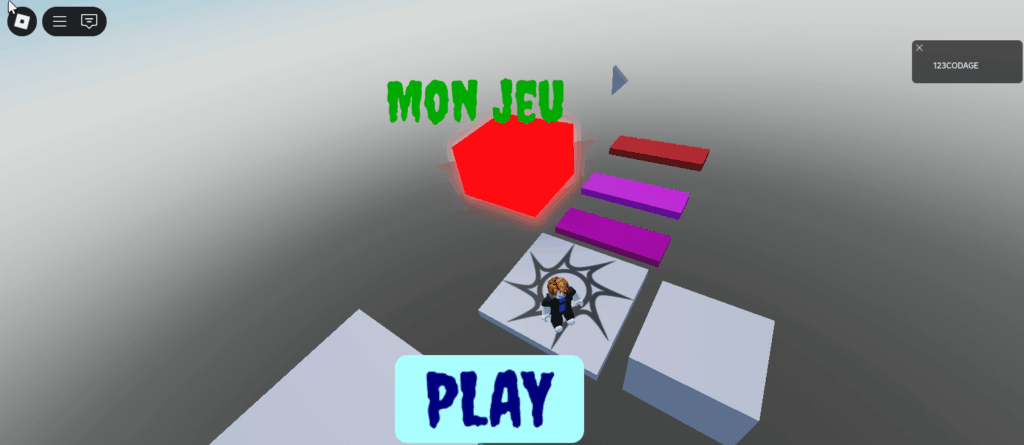
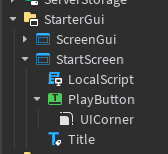
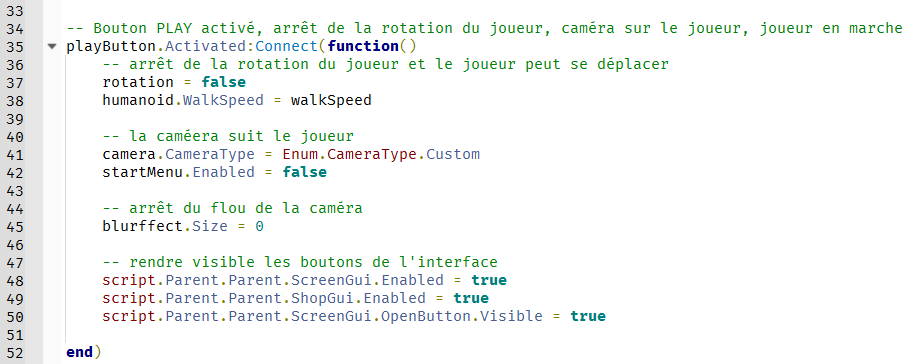
Créer un menu de lancement du jeu : Afficher le titre du jeu et un bouton PLAY.
Créer un script de démarrage : Lancer le jeu par le bouton play.
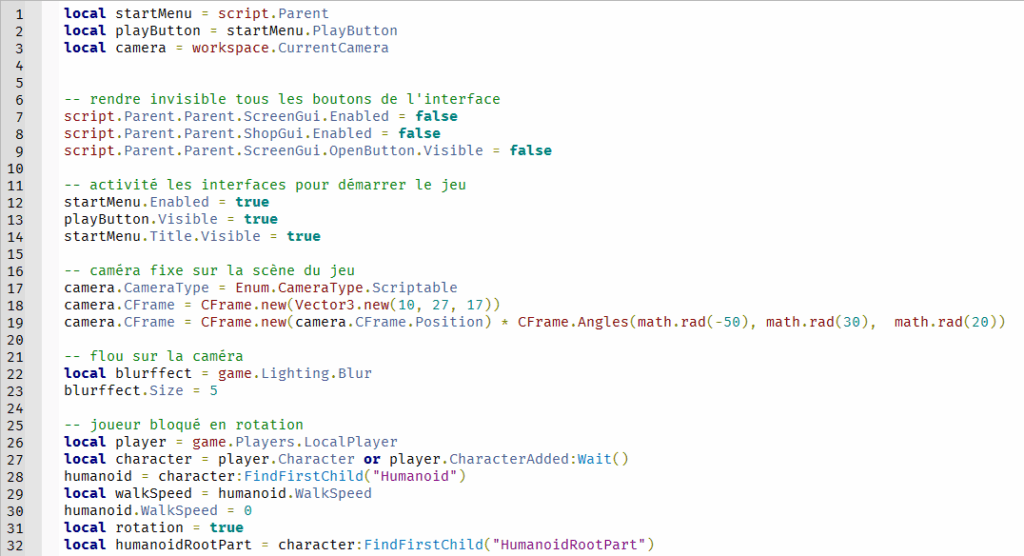
Créez un menu de démarrage du jeu :
Crée un script pour afficher le menu et lance le jeu :
Partie IX : Animation glissade du joueur
Objectif : Crée une animation de glissade
Instructions :
Créer une animation : Lancer le jeu par le bouton play.
Créer un script pour lancer l’animation sur l’appuie d’une touche du clavier
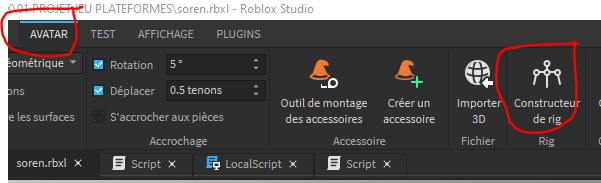
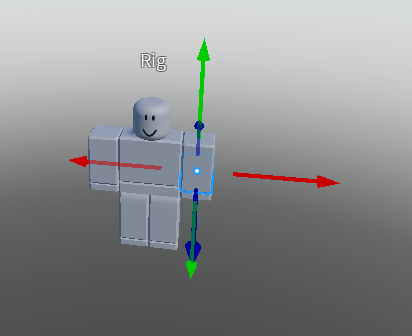
Choisis AVATAR puis constructeur de RIG
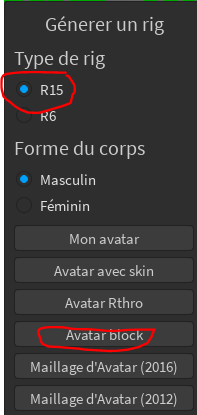
Choisis ton RIG :
R6 : Moins de parties mobiles, mouvements moins fluides, apparence plus simple.
R15 : Plus de parties mobiles, mouvements plus fluides et réalistes, apparence plus détaillée.
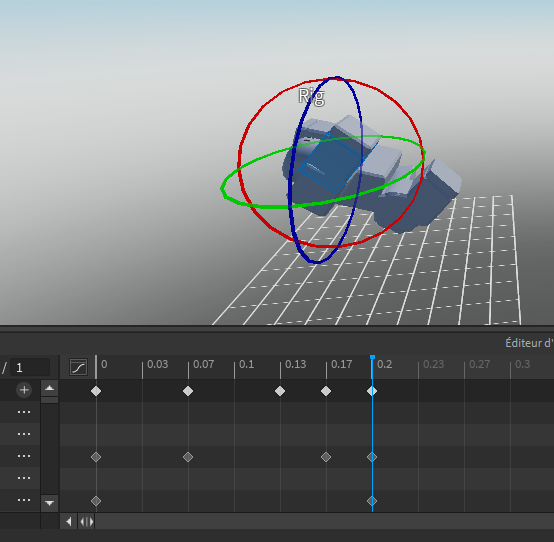
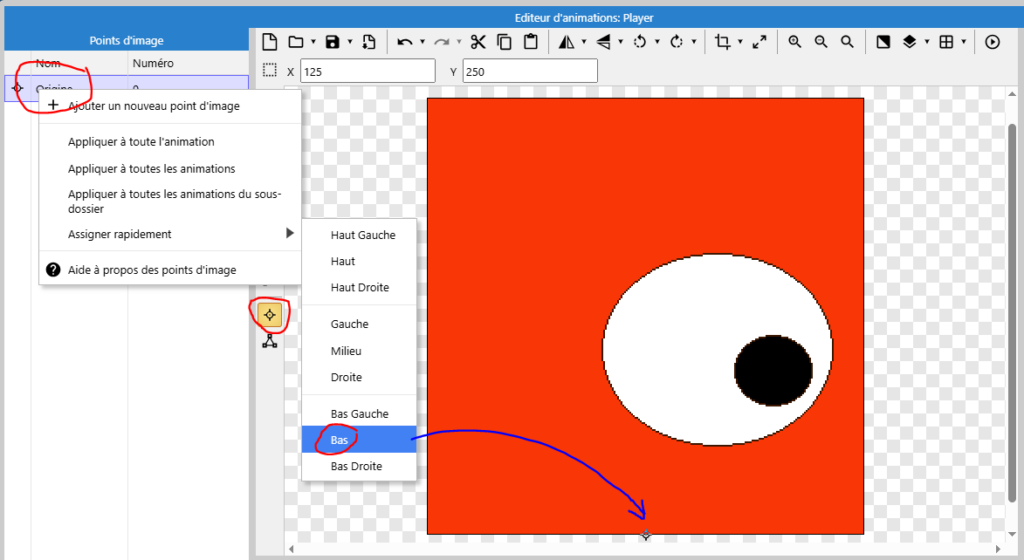
Déplace ton RIG pour créer l’animation
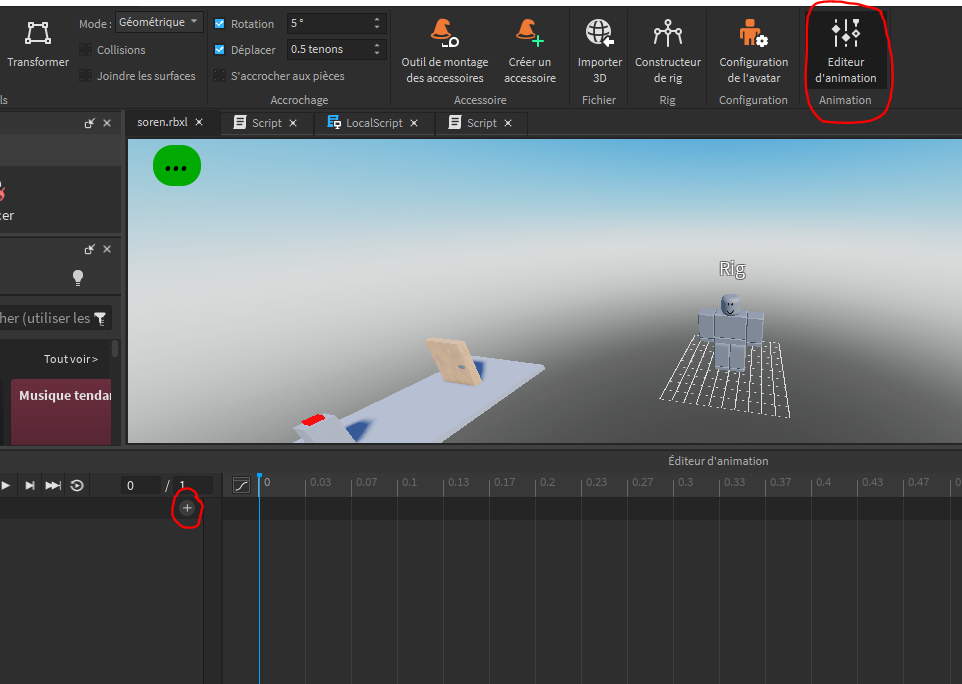
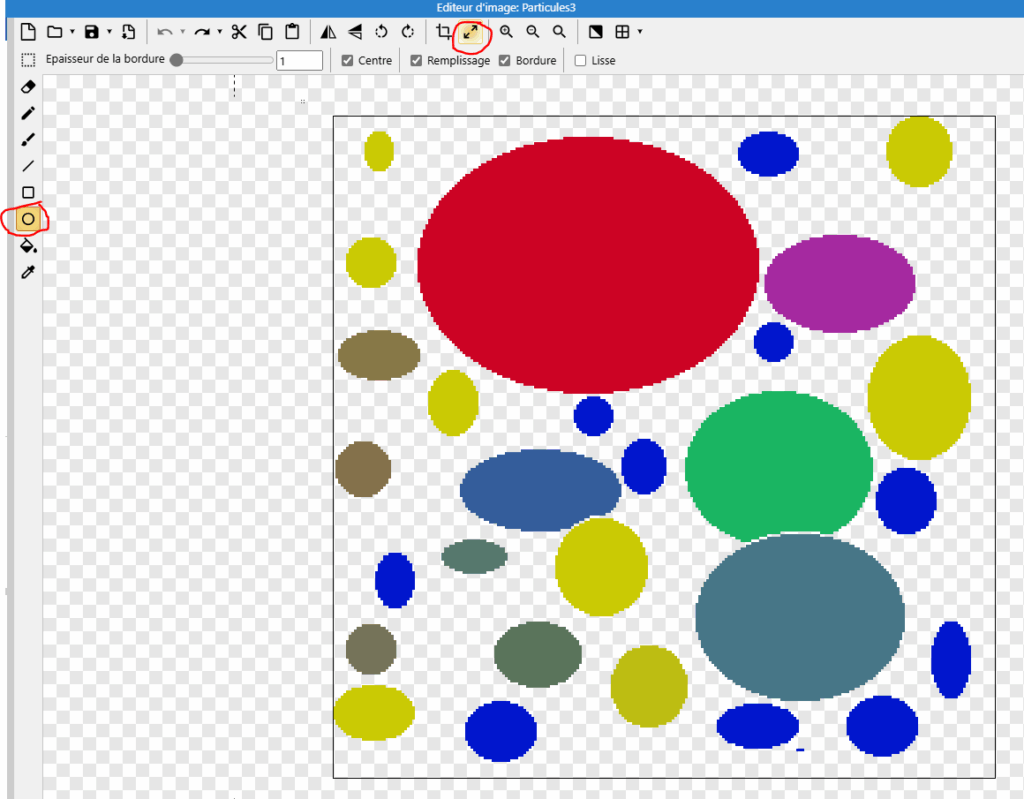
Ouvre l’éditeur d’animation :
L’éditeur d’animation ouvre une Timelapse :
Une timelapse dans un éditeur d’animation est une technique qui permet de capturer et de montrer le processus de création d’une animation. Cela signifie que vous enregistrez votre travail à intervalles réguliers et ensuite vous compilez ces enregistrements en une vidéo qui montre l’ensemble du processus de l’animation.
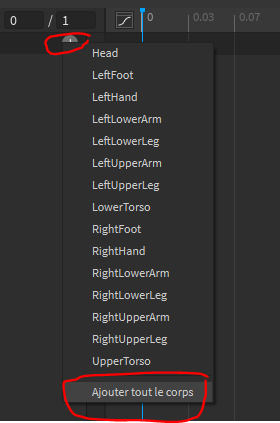
Demande à créer l’animation sur l’ensemble du corps en appuyant sur le + :
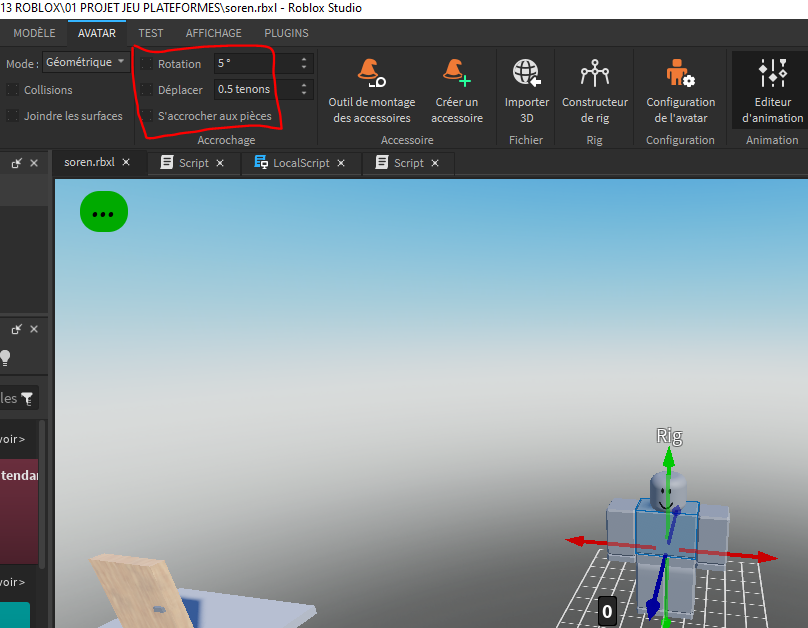
Décoche Rotation et Déplacer
Modifie les positions du corps étape par étape pour animer une glissade :
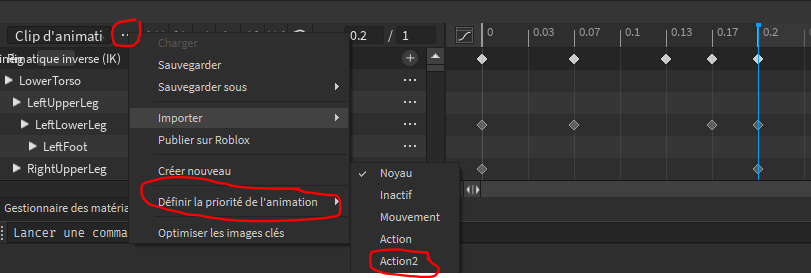
Définis la priorité de l’animation :
Action2 : Utilisé pour les animations qui doivent avoir la priorité sur les animations d’inactivité et de mouvement, mais pas nécessairement sur les animations de haute priorité.
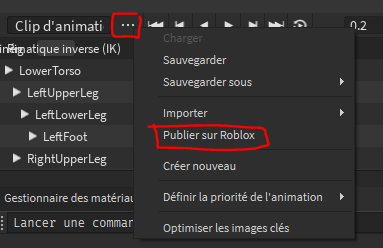
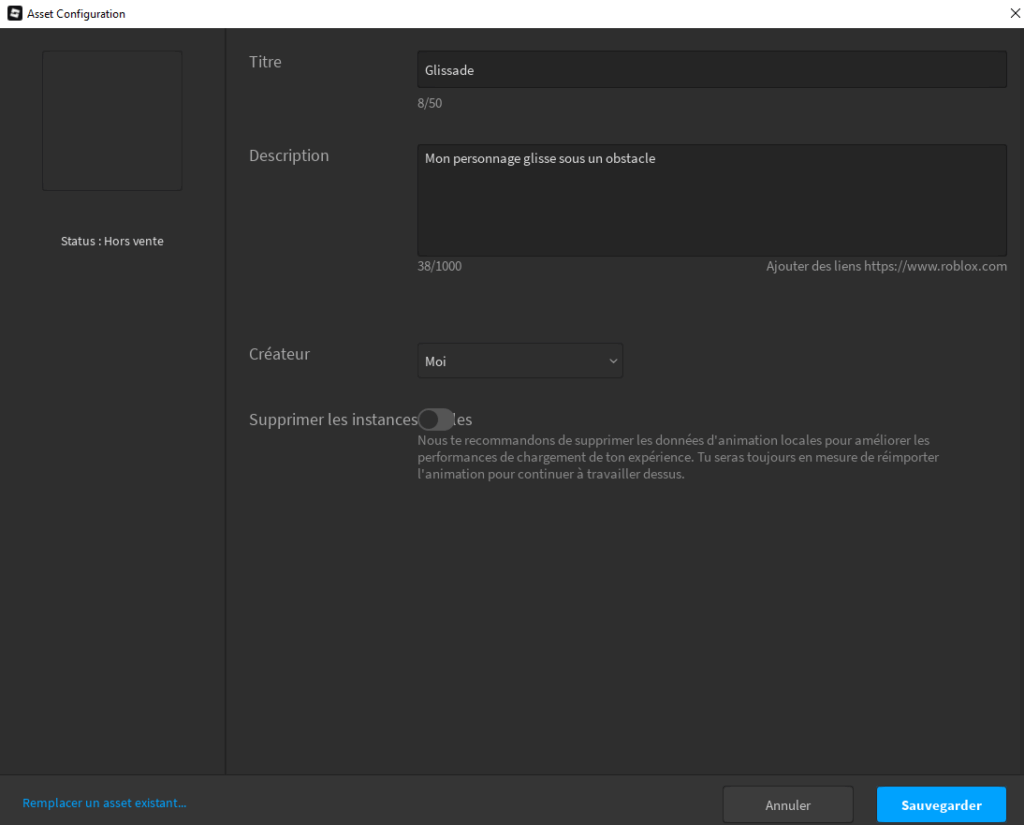
Sauvegarde l’animation et garde bien sa référence car tu vas en avoir besoin :
Copie la référence de l’animation :
Garde bien l’identifiant puis ferme la fenêtre:
Script de l’animation
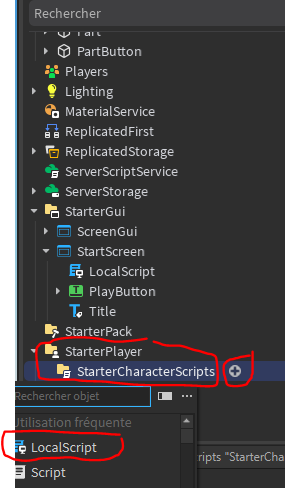
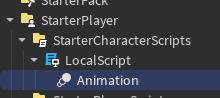
Crée un localscript sous StarterPlayer dans StarterCharacterScripts :
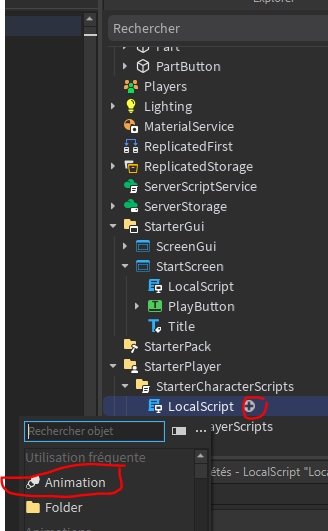
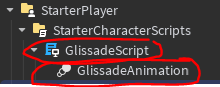
Puis une animation :
Modifie les noms du script et de l’animation :
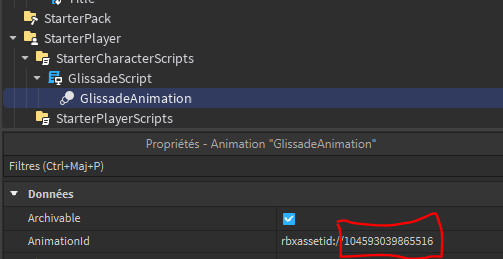
Tu peux maintenant coller la référence de l’animation dans AnimationId de ton animation :
Code du script pour lancer l’animation
Code ton script pour que l’animation se lance sur une touche du clavier, dans l’exemple la touche CTRL :
local UIS = game:GetService(« UserInputService »)
UIS.InputBegan:Connect(function(input, gpe) if gpe then return end if input.KeyCode == Enum.KeyCode.LeftControl then print(« animation glissade ») end end)
Vérifie que tu as le message dans la sortie lorsque tu appuies sur CTRL
Code pour lancer l’animation dans une fonction et que tu ne puisses pas la lancer plusieurs fois :
local in_progress = false local function ActivationGlissade() if not in_progress then in_progress = true print(« animation glissade ») task.wait(1) in_progress = false end end
UIS.InputBegan:Connect(function(input, gpe) if gpe then return end if input.KeyCode == Enum.KeyCode.LeftControl then ActivationGlissade() end end)
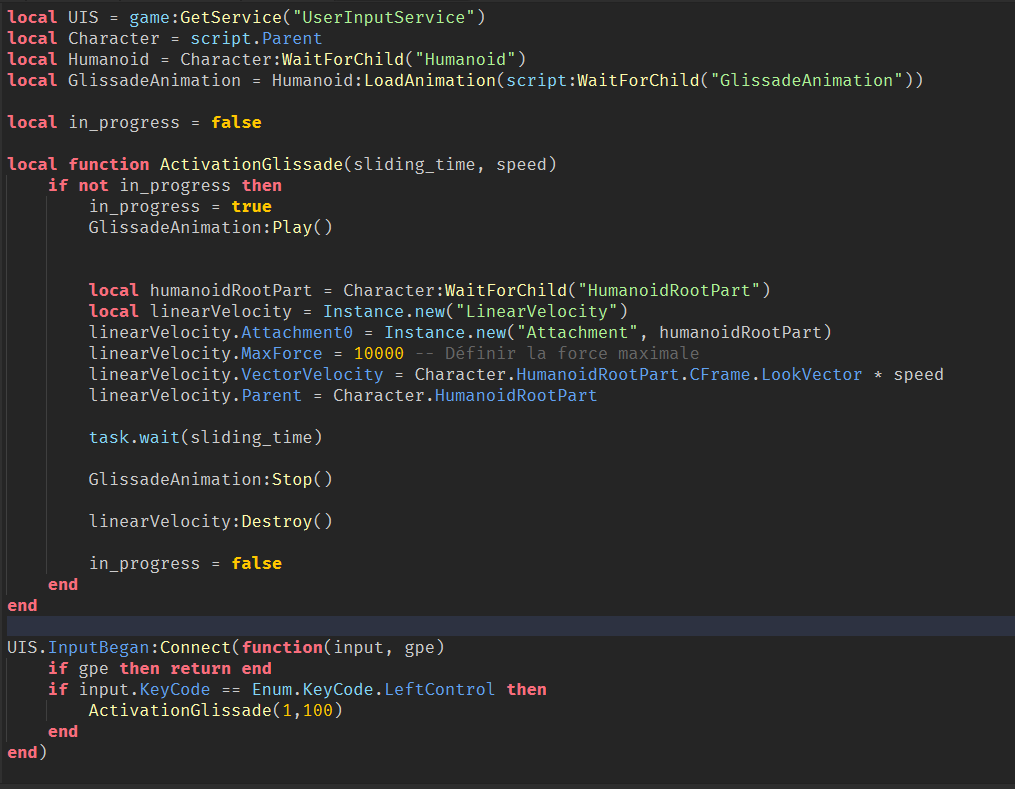
Code pour lancer l’animation :
local UIS = game:GetService(« UserInputService »)
local Character = script.Parent local Humanoid = Character:WaitForChild(« Humanoid ») local GlissadeAnimation = Humanoid:LoadAnimation(script:WaitForChild(« GlissadeAnimation »))
local in_progress = false
local function ActivationGlissade() if not in_progress then in_progress = true GlissadeAnimation:Play() task.wait(1) in_progress = false end end
Ton animation se lance mais ne s’arrête plus :
local function ActivationGlissade() if not in_progress then in_progress = true GlissadeAnimation:Play()
local humanoidRootPart = Character:WaitForChild(« HumanoidRootPart ») local linearVelocity = Instance.new(« LinearVelocity ») linearVelocity.Attachment0 = Instance.new(« Attachment », humanoidRootPart) linearVelocity.MaxForce = 10000 — Définir la force maximale linearVelocity.VectorVelocity = Character.HumanoidRootPart.CFrame.LookVector * 30 linearVelocity.Parent = Character.HumanoidRootPart
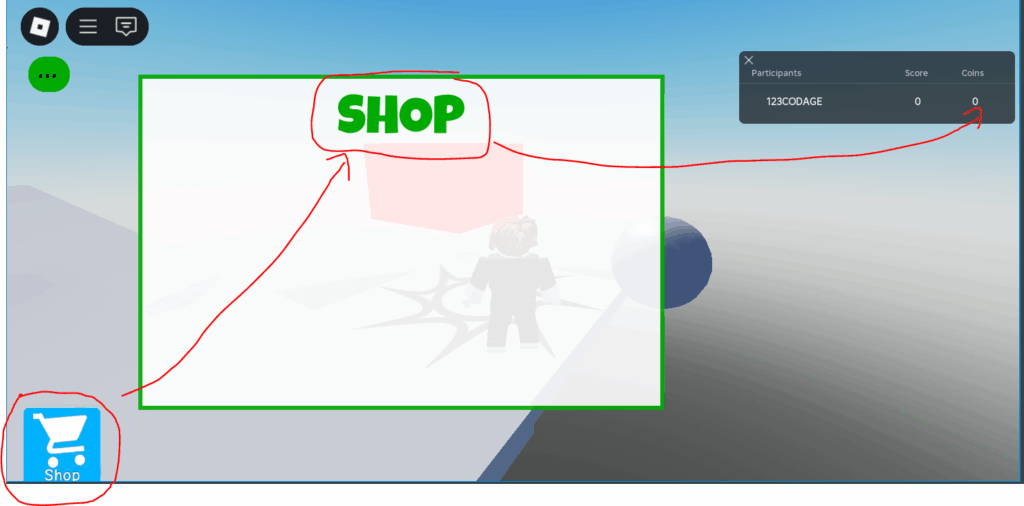
Objectif : Créé une boutique avec des objets à acheter
Crée un bouton et une fenêtre pour ta boutique sous StarterGUI :
Pout ta boutique crée :
un bouton pour ouvrir et fermer la fenêtre de ta boutique
une fenêtre avec un titre
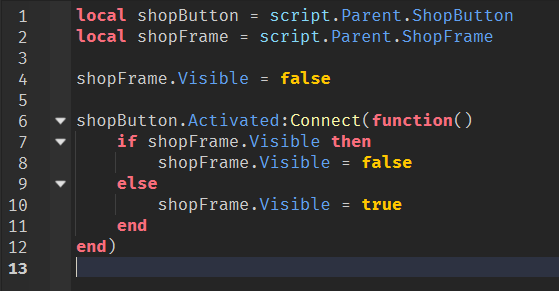
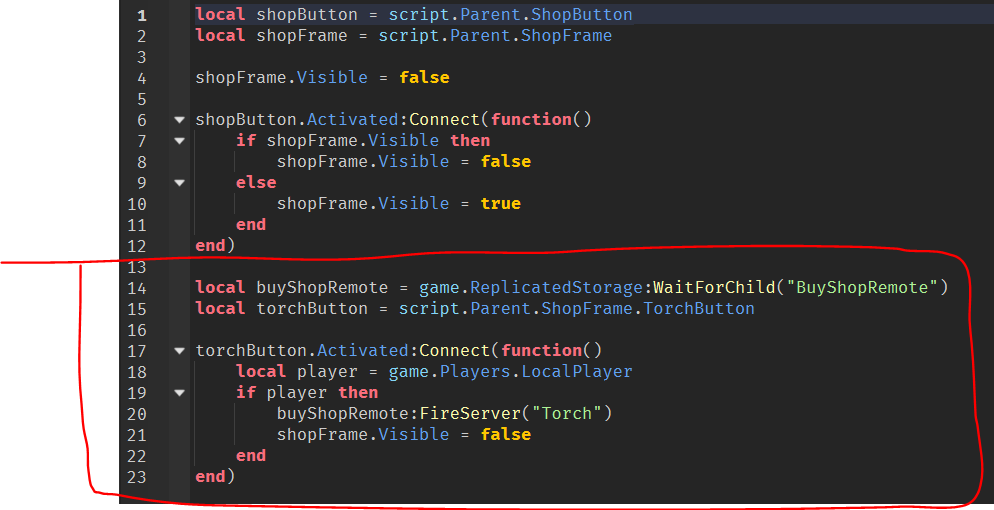
un localscript pour gérer l’ouverture de ta boutique
Ton script :
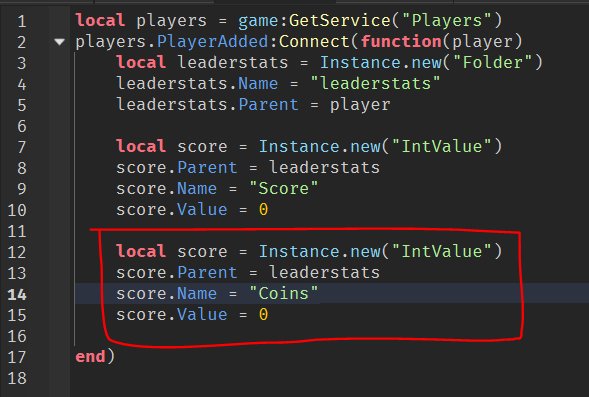
Modifie sous ServerScriptService le script leaderstats pour gérer un portemonnaie numérique :
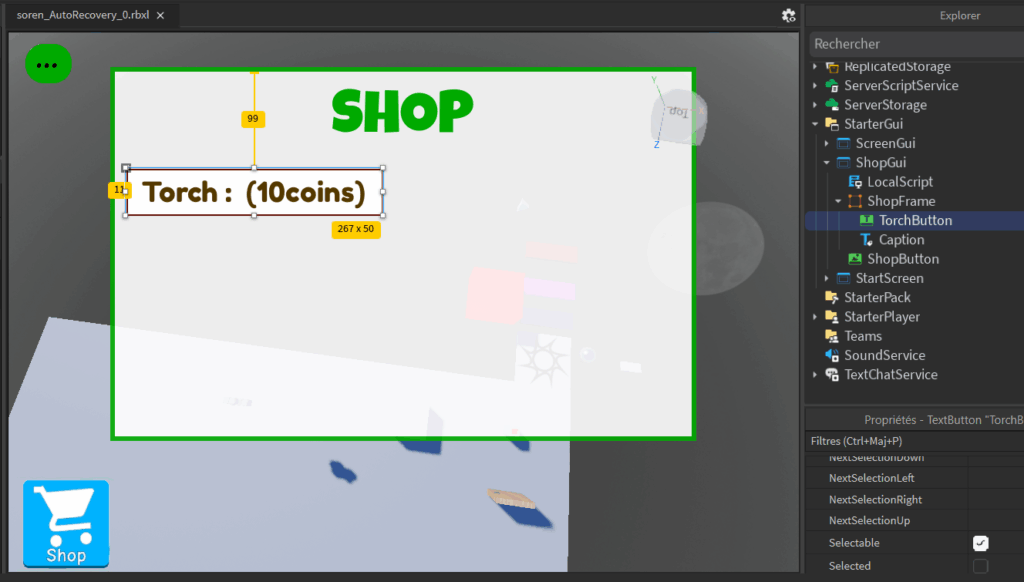
Modifie ta boutique pour proposer l’achat d’une torche par l’ajout d’un TextButton:
L’objectif est de placer la torche achetée dans la boutique dans le BackPack du joueur. Le Backpack est principalement utilisé pour contenir des outils que les joueurs peuvent s’équiper et utiliser. Ces outils peuvent être des objets interactifs, des armes, ou tout autre objet qui peut être utilisé pour interagir avec le monde du jeu.
Le Backpackest principalement géré côté client. Chaque joueur a son propre Backpack, et les outils qu’il contient sont spécifiques à ce joueur.
Bien que le Backpacksoit géré côté client, les outils peuvent être ajoutés ou retirés par des scripts côté serveur en utilisant des RemoteEvents pour communiquer avec le client.
ReplicatedStorageest souvent utilisé pour stocker des objets et des ressources qui doivent être partagés entre le serveur et les clients, ce qui en fait un endroit logique pour organiser les RemoteEvents.
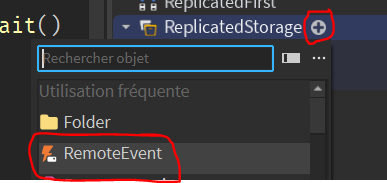
Crée un RemoteEvent sur ReplicatedStorage :
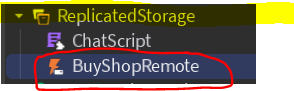
Puis renomme le RemoteEvent :
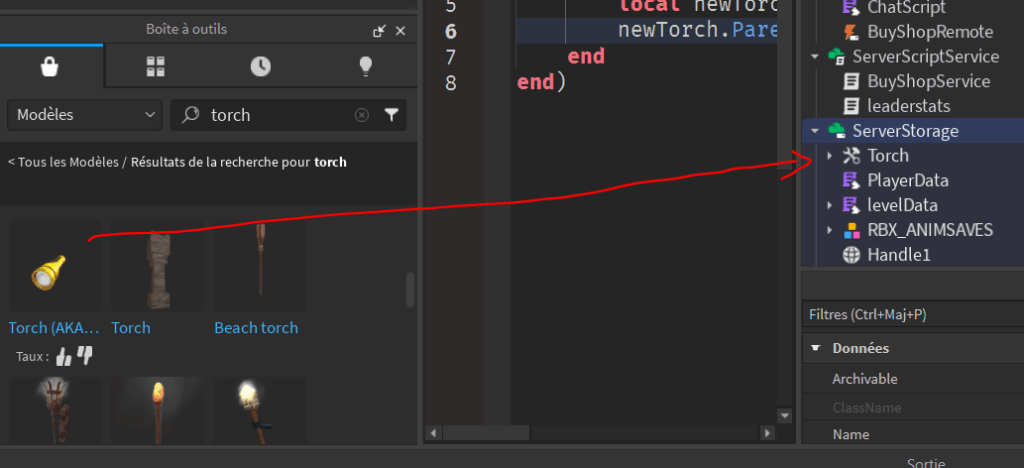
Puis stocke une torche dans le ServerStorage.
ServerStorage offre un endroit organisé pour stocker les objets côté serveur, ce qui peut faciliter la gestion et la maintenance du code et des ressources du jeu.
Modifie le script du caddy pour prendre la torche :
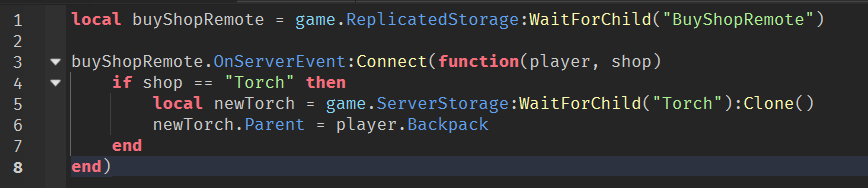
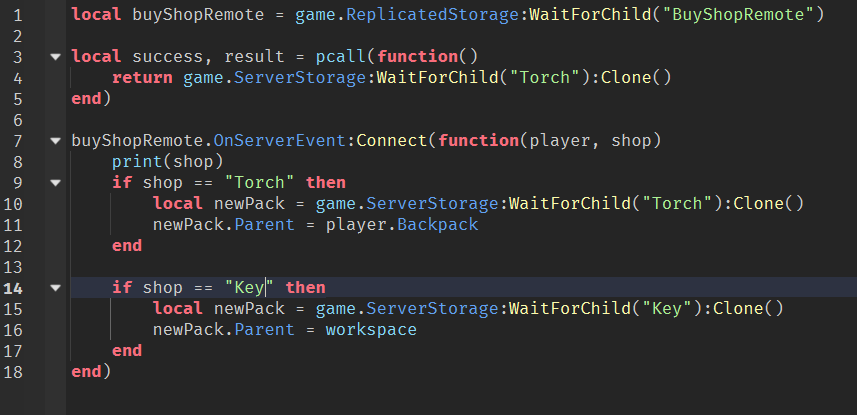
Puis crée un script BuyShopService dans ServerScriptService pour ajouter la torche au BackPack :
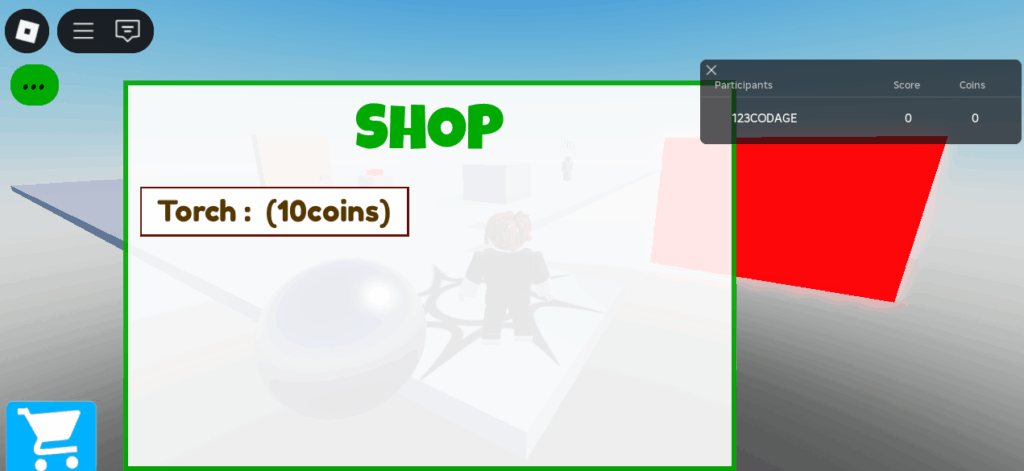
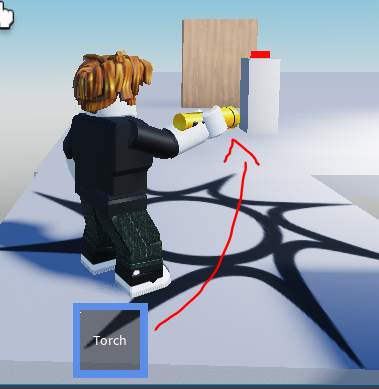
Lance le jeu pour tester le résultat :
Achète la torche, on ne contrôle pas pour l’instant si tu disposes de suffisamment d’argent :
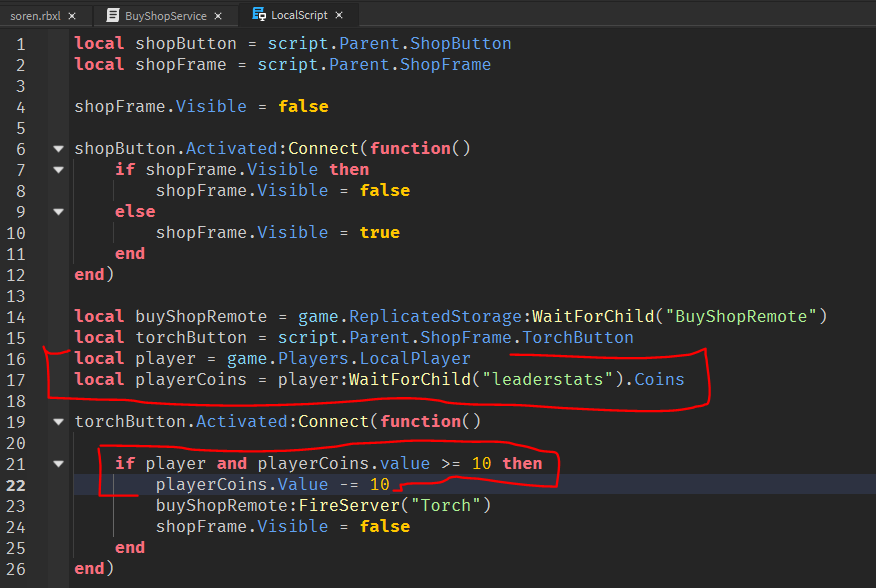
Maintenant contrôle si le joueur peut acheter la torche, modifie le script de ta boutique :
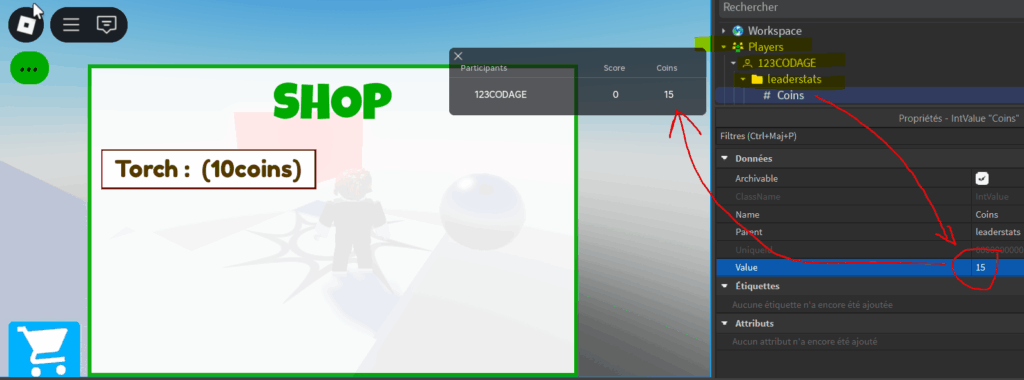
Puis pour tester, modifie la valeur de coins lorsque tu lances le jeu :
Au lieu de mettre l’objet dans BackPack, tu peux le mettre à disposition dans le Workspace :
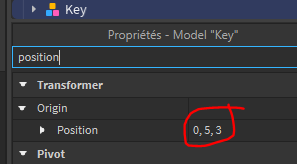
Donne une position correcte à l’objet dans ServerStorage :
Ainsi que :
Partie XII : Modifie l’éclairage du jeu
Objectif : Modifier l’éclairage global du jeu
Propose à ton joueur de vivre une ambiance différente en :
Modifiant le niveau de l’éclairage global.
Modifiant l’heure de la journée.
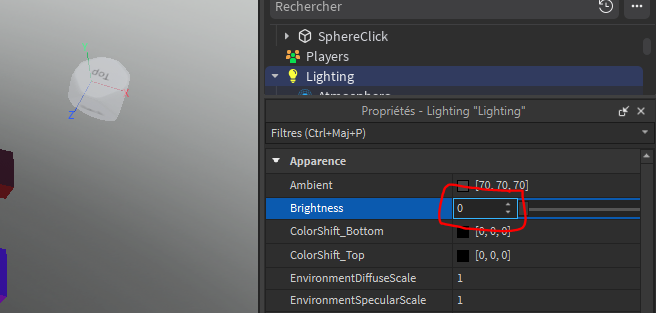
Change l’éclairage global
L’éclairage global correspond à la luminescence du soleil ou de la lune.
Dans la fenêtre de l’Explorateur , sélectionnez Lighting .
Dans la fenêtre Propriétés , modifie le paramètre Brightness :
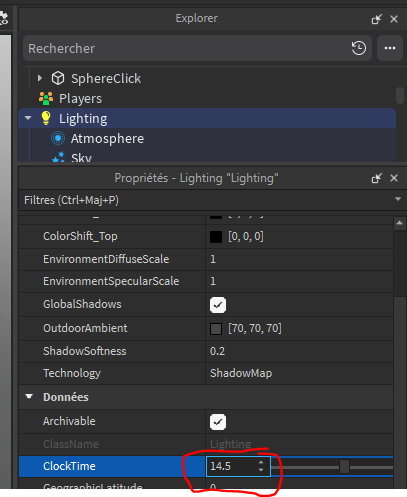
Changer l’heure de la journée
Change l’heure de la journée pour modifier l’éclairage global de ton jeu.
Dans la fenêtre de l’Explorateur , sélectionnez Lighting .
Dans la fenêtre Propriétés , modifie le paramètre ClockTime :
Jouer avec un script sur la luminosité :
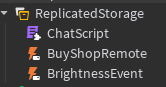
Crée un nouveau RemoteEvent BrightnessEvent:
Crée un script BrightnessService sous ServerScriptService :
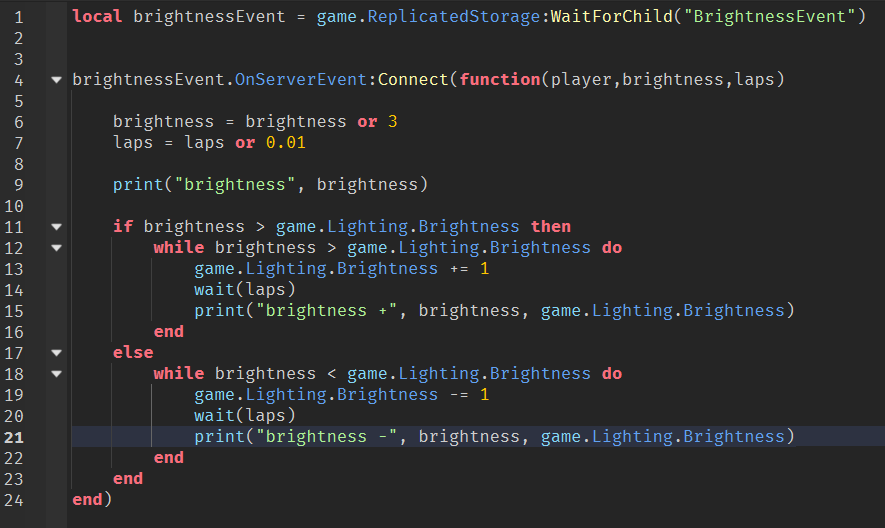
Puis dans le script saisie le programme suivant :
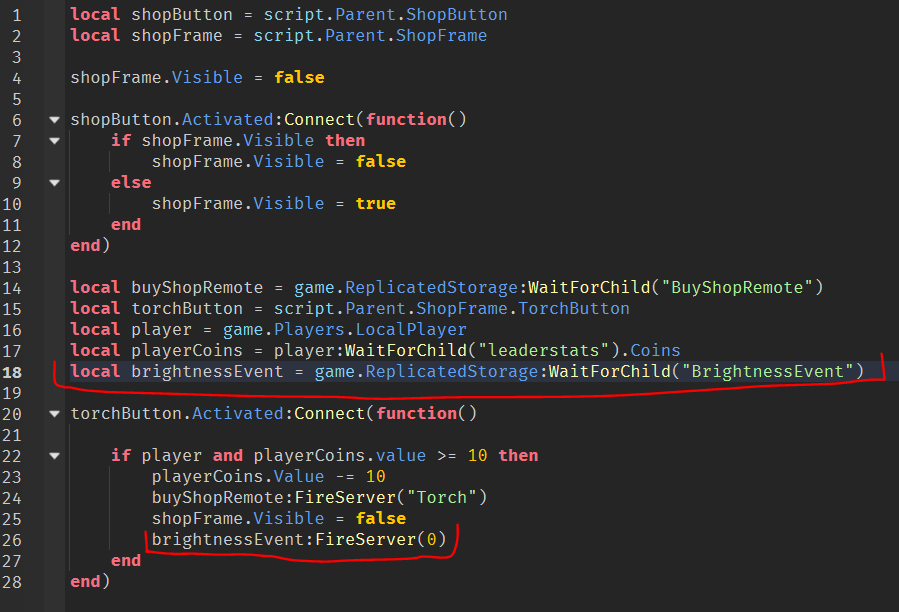
Puis diminue la lumière dès que le joueur achète la torche :
Partie XIII : Téléportation
Objectif :
Tu vas utiliser la téléportation pour ton jeu mais également pour tester plus rapidement des phases de ton jeu. Tu pourras mettre ainsi une téléportation pour déplacer ton joueur dans une zone à tester sans avoir à parcourir tout le jeu.
Mise en place des points de téléportation
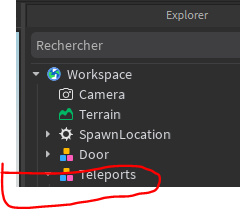
Dans Workspace crée un nouveau model :
Que tu renommes Teleports :
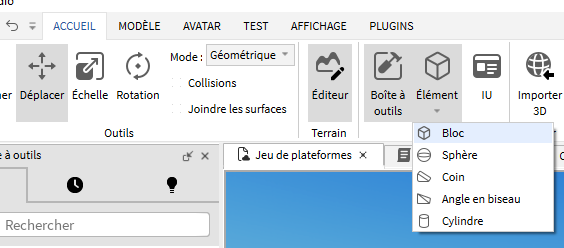
Puis crée deux bocs :
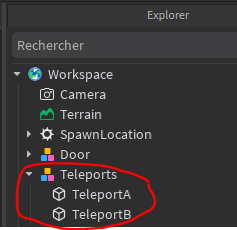
Que tu glisses sous Teleports et renommes en TeleportA et Teleport B :
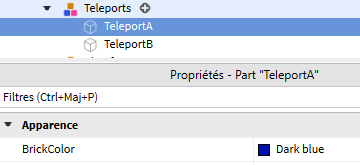
Modifie la couleur :
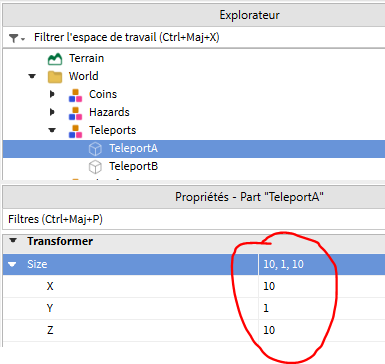
Modifie la taille :
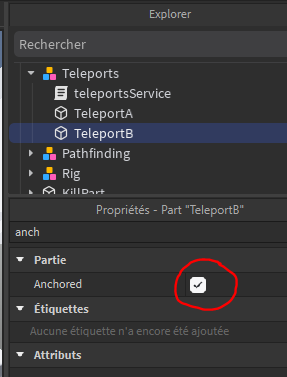
Puis modifie ce paramètre :
Puis place dans ton jeu les deux points de téléportation, le point A près de ton joueur au lancement du jeu, puis le point B à l’endroit d’arrivée de ton joueur.
Programme ta première téléportation
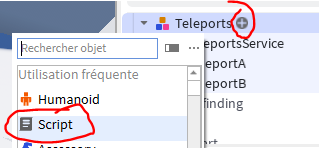
Puis viens créer un nouveau script sous Teleleports :
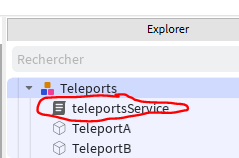
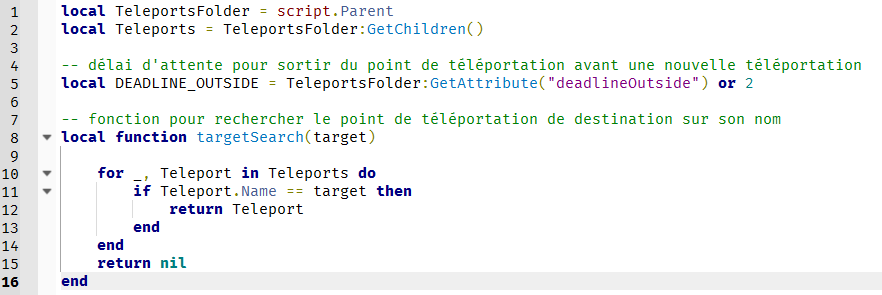
Renomme le nouveau script en TeleportService :
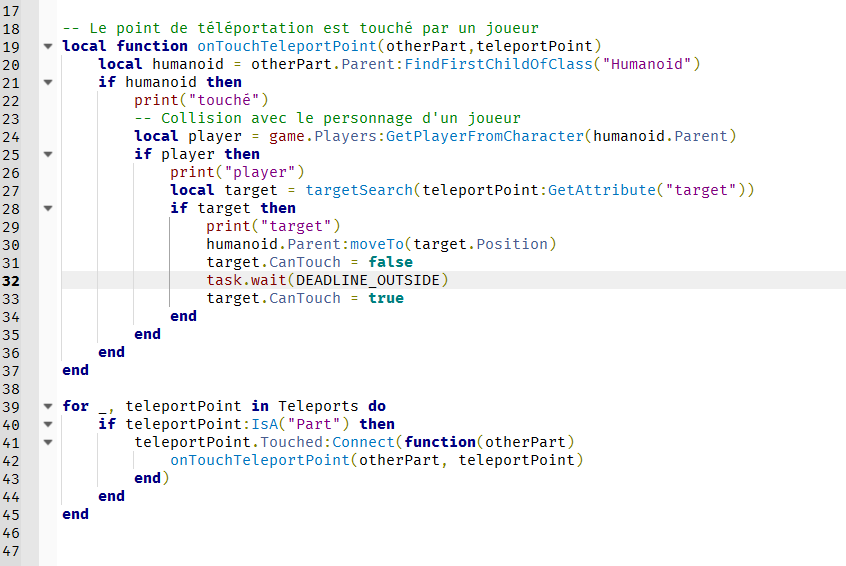
Puis écris le programme suivant dans le script TeleportService :
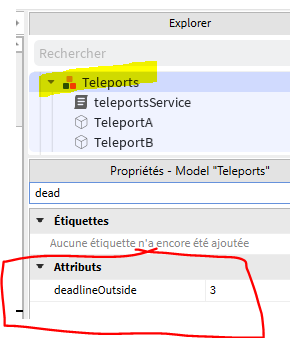
Sur le model Teleports crée la propriété deadlineOutside temps en seconde, cette propriété est utilisée pour indiquer le temps pour que le joueur puisse sortir du point de téléportation avant une nouvelle téléportation :
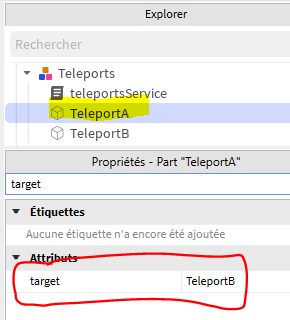
Puis pour chaque point de téléportation, crée une nouvelle propriété target pour indiquer le point de téléportation de destination :
Lance ton jeu et essaye la téléportation
Conclusion
En suivant ces instructions, vous serez en mesure de créer un obby complet et fonctionnel sur Roblox. Assurez-vous de respecter tous les critères et d’utiliser les indices pour vous aider à compléter chaque partie. Bonne chance et amusez-vous bien !
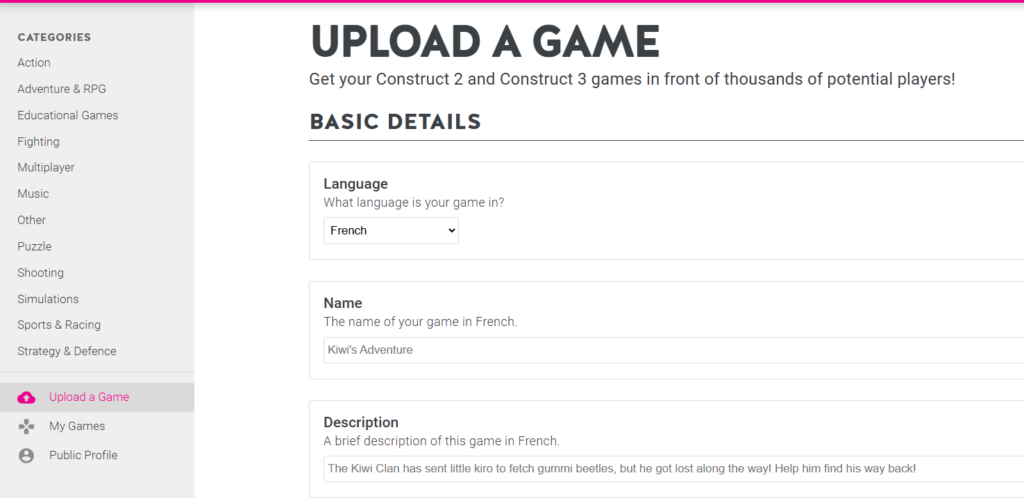
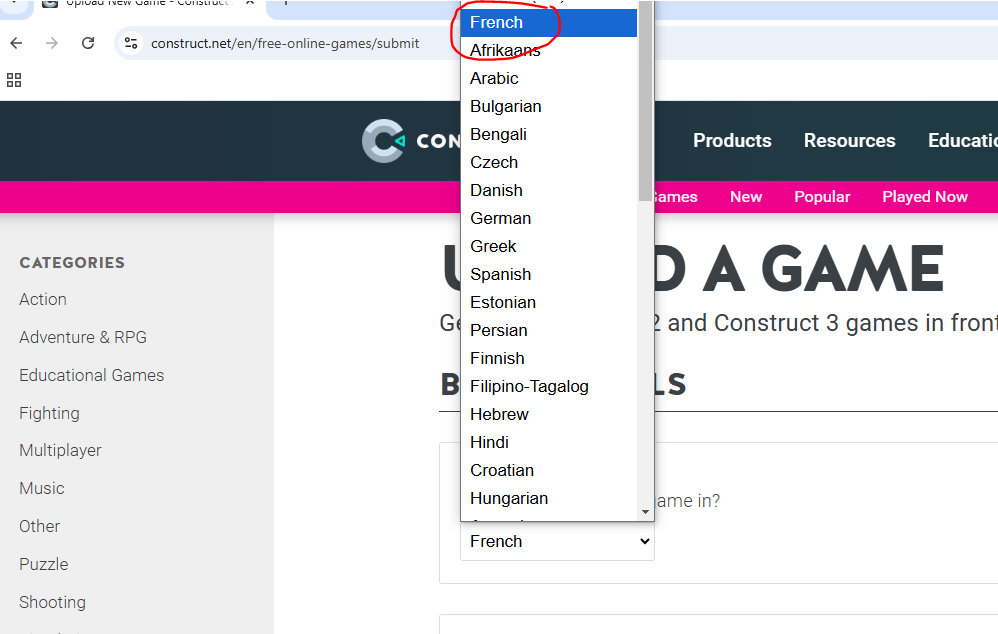
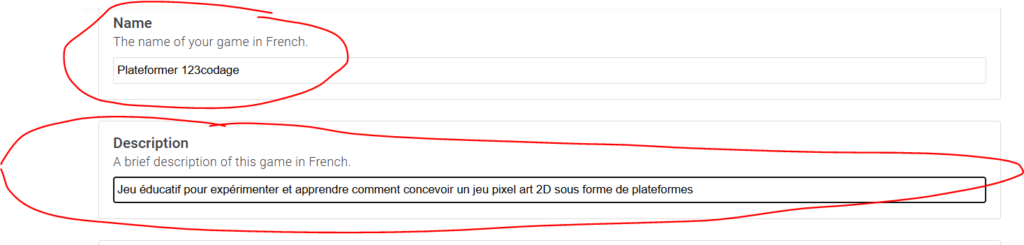
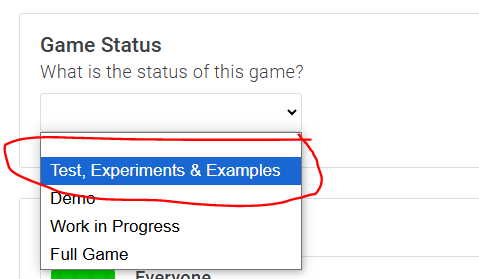
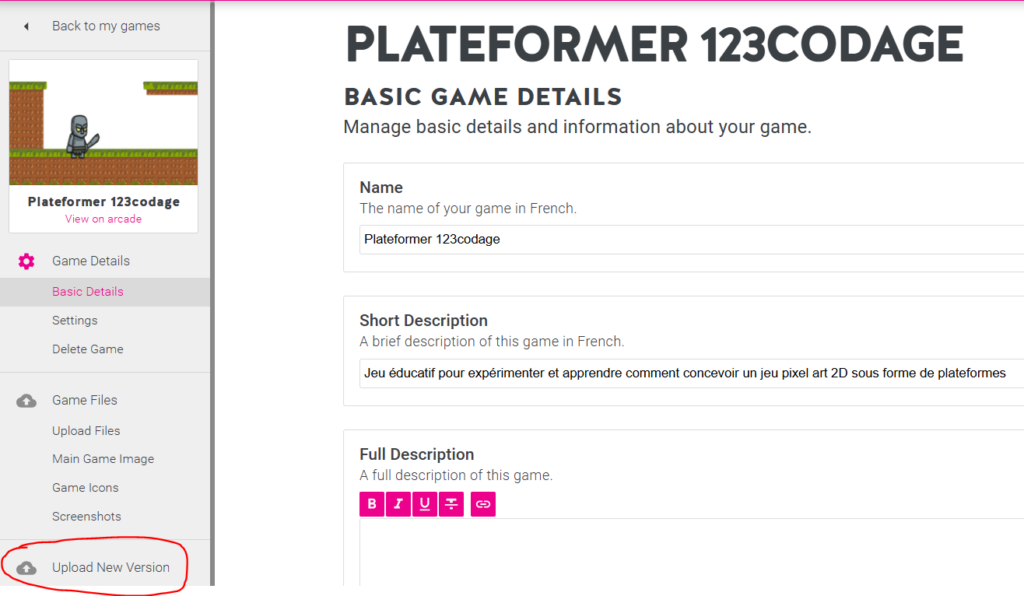
A toi de choisir le statut de ton jeu : en cours de création (Work in Progress) ou complétement terminé (Full Game)
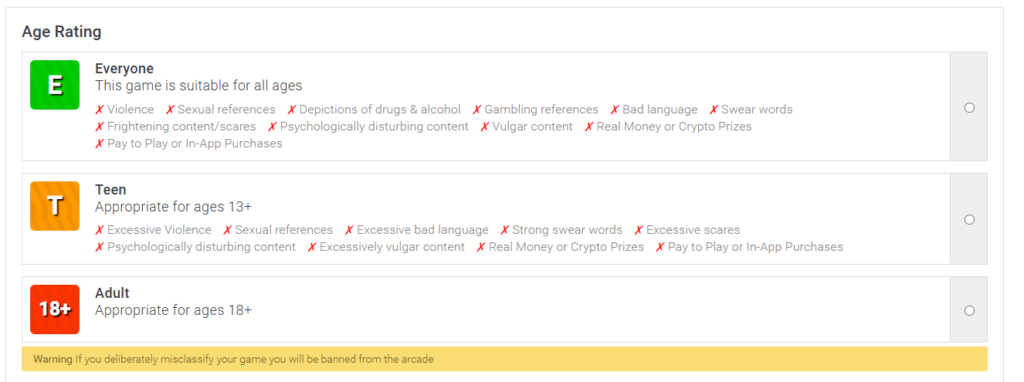
Choisir le public qui peut jouer à ton jeu en fonction de son âge :
Tous les âges
A partir des adolescents de plus de 13 ans
Seulement les adultes
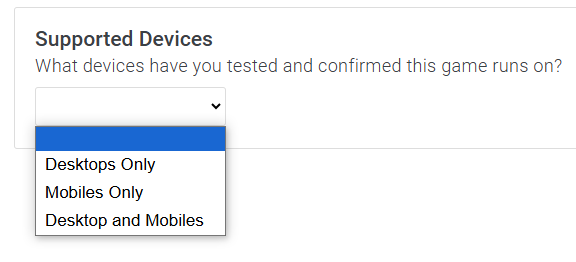
Choisis le type d’appareil sur lequel on peut jouer avec ton jeu :
Les ordinateurs seulement
Les smartphones seulement
Les deux ordinateurs et smartphones
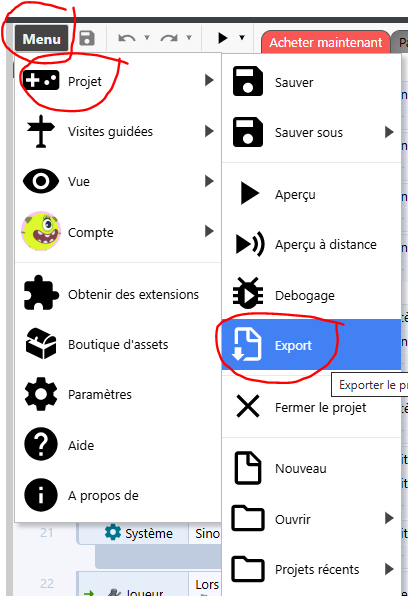
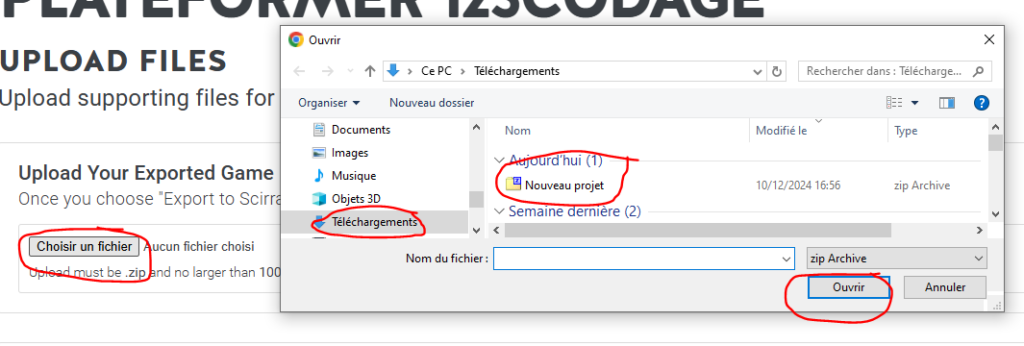
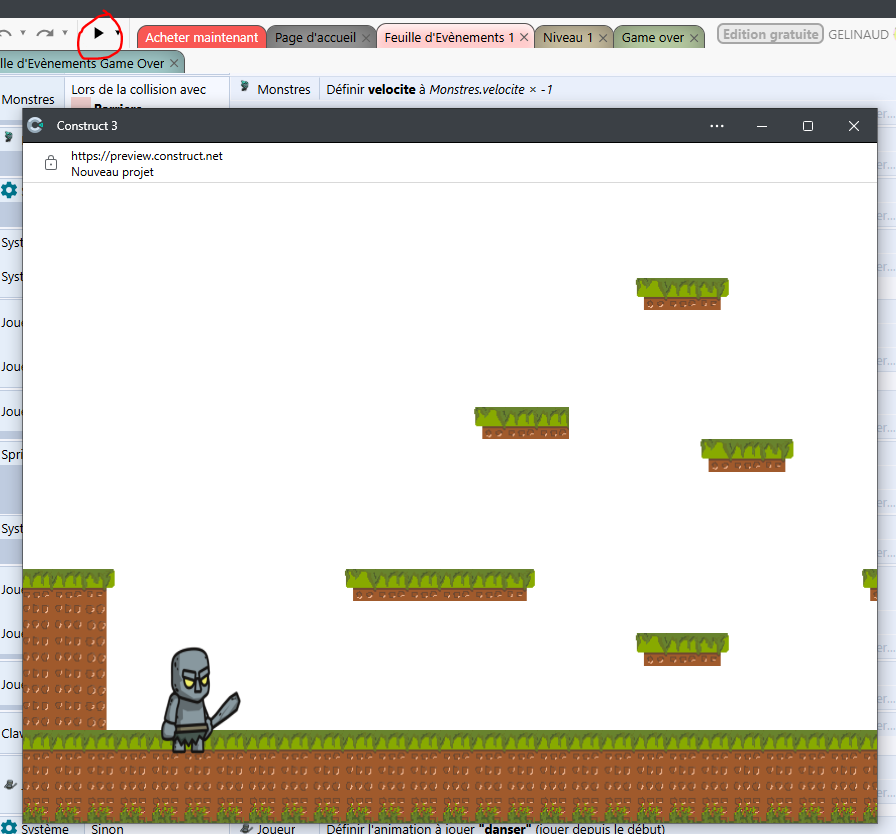
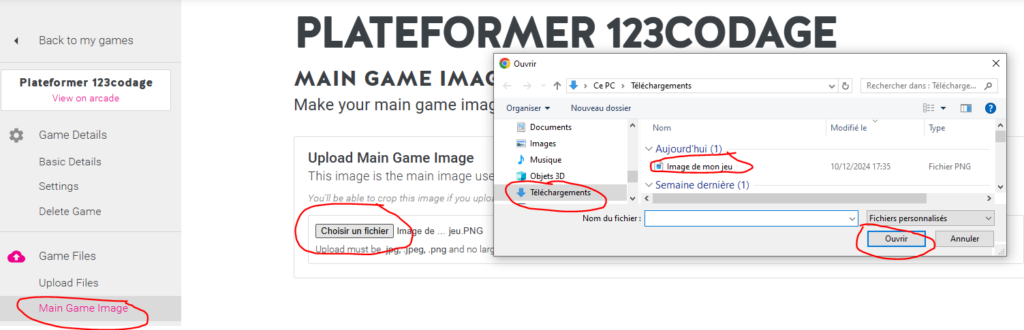
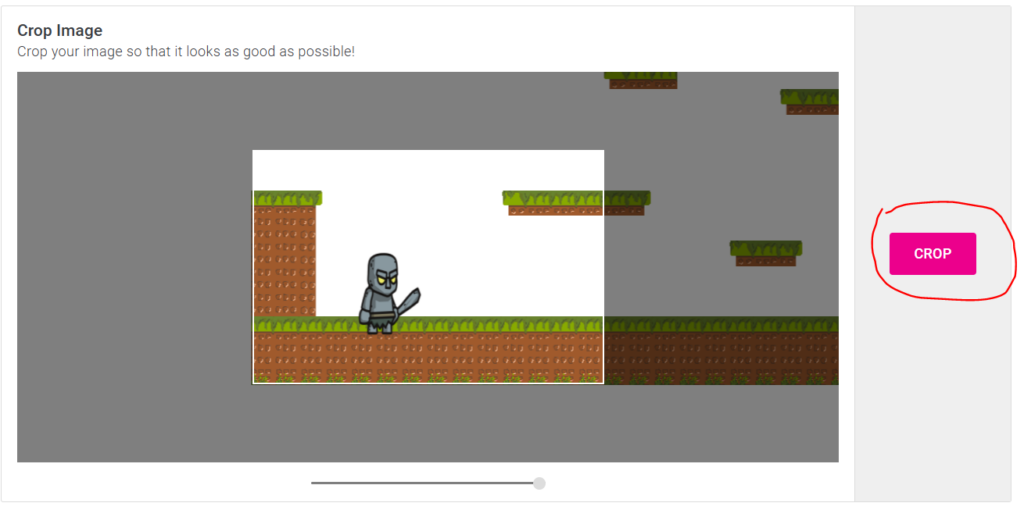
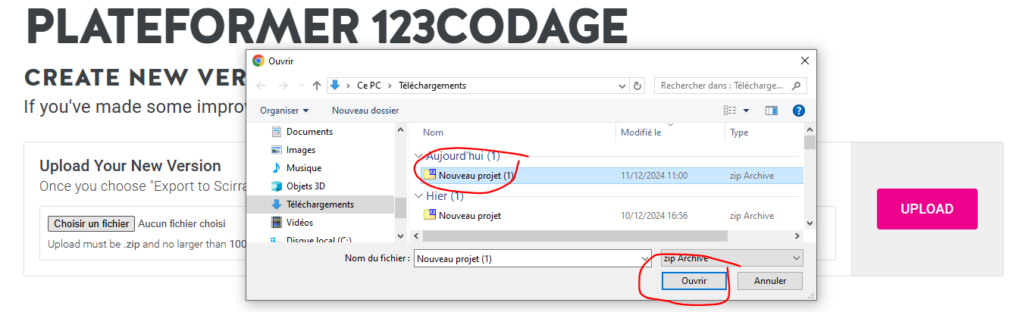
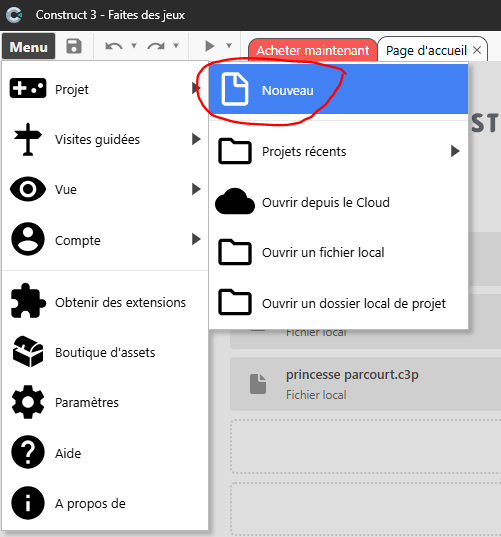
Maintenant que tu as téléchargé ton jeu, tu dois mettre une image représentative de ton jeu. Pour cela lance ton jeu dans contruct 3 :
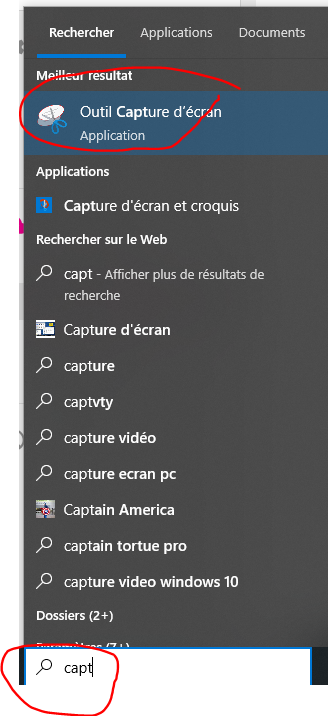
Puis utilise l’outil capture de windows pour copier une image de ton jeu :
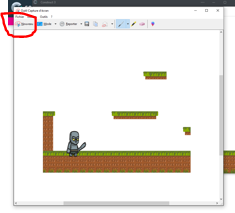
Dans l’outil capteur clic sur nouveau en haut à gauche de l’outil capture, puis avec la souris sélectionne une partie de l’écran de ton jeu :
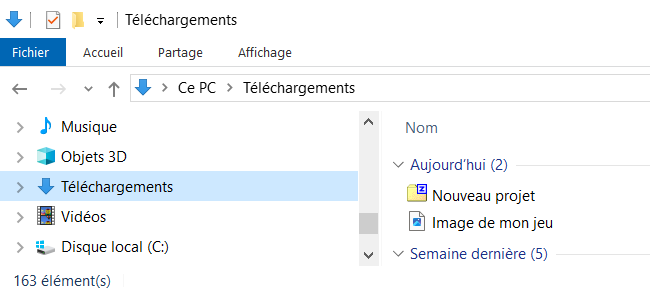
Dans l’outil capture Fichier Enregistrer sous le répertoire téléchargement :
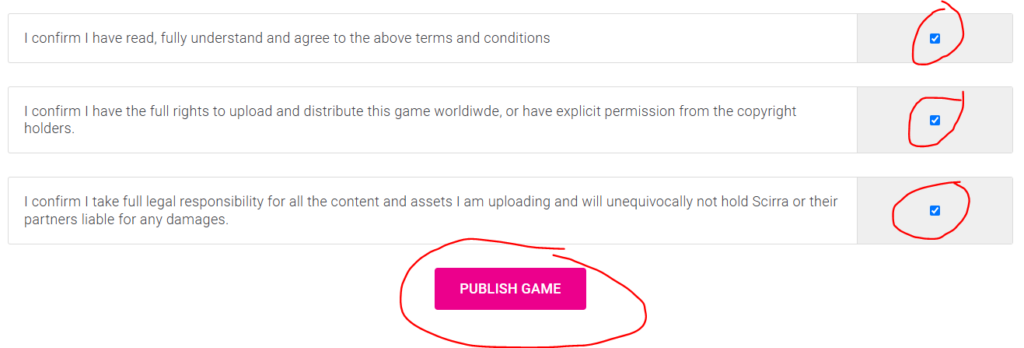
Accepte les conditions suivante pour publier ton jeu :
Je confirme avoir lu, compris pleinement et accepté les termes et conditions ci-dessous.
Je confirme que j’ai tous les droits pour télécharger et distribuer ce jeu dans le monde entier, ou que j’ai l’autorisation explicite des détenteurs des droits d’auteur.
Je confirme que j’assume l’entière responsabilité juridique de tout le contenu et des ressources que je télécharge et que je ne tiendrai définitivement pas Scirra ou ses partenaires responsables de tout dommage.
Principalement :
Tu dois faire attention à ce que les images et les sons de ton jeu soient libre des droits d’auteur.
Tu ne dois pas télécharger un jeu dont le contenu contient :
Du contenu diffamatoire, sur la religion, la race, l’orientation sexuelle, le sexe, l’origine nationale/ethnique ou d’autres groupes ciblés.
Des représentations réalistes de personnes ou d’animaux tués, mutilés, torturés ou maltraités, ou du contenu qui encourage la violence
ACCORD
Le présent Accord d’utilisation (« Accord ») est un contrat juridiquement contraignant entre vous et Scirra Ltd. et avec notre société mère, nos filiales et sociétés affiliées (« Scirra », « Construct » ou « nous »).
Nous nous réservons le droit, à notre discrétion, de changer, modifier, ajouter ou supprimer des parties de l’Accord à tout moment en publiant l’Accord modifié sur notre Plateforme ou dans nos Services (par exemple via des avis dans le jeu). En cas de changement important, nous pouvons également fournir un avis supplémentaire en envoyant un e-mail ou un message dans les Services. Sauf indication contraire de notre part, les modifications entrent en vigueur immédiatement après leur publication. Chaque fois que vous accédez à nos Services, à la Plateforme ou à des Jeux de Plateformes tierces, la version alors en vigueur de l’Accord s’applique et vous acceptez que les modifications s’appliquent à votre utilisation continue des Services.
Le fait que vous n’annuliez pas votre compte ou ne cessiez pas d’utiliser nos Services après avoir reçu la notification de l’Accord modifié constituera votre acceptation des conditions modifiées. Si vous n’acceptez pas les modifications ou l’une des conditions du présent Contrat, votre seul recours est de résilier votre compte ou de cesser d’utiliser nos Services.
Si une partie du présent Contrat est jugée illégale ou inapplicable, le reste du Contrat ne sera pas affecté et continuera d’être pleinement valide, contraignant et applicable.
LITIGES
Tous les litiges doivent être réglés par les tribunaux du Royaume-Uni. Le présent contrat doit être interprété conformément aux lois du Royaume-Uni. Toutes les parties consentent par les présentes à la juridiction des tribunaux du Royaume-Uni. Si une partie du présent contrat est jugée inapplicable ou invalide par la loi, les autres parties du contrat resteront en vigueur.
INDEMNITÉ
Vous acceptez de défendre, d’indemniser et de dégager de toute responsabilité Scirra, ses concédants de licence et ses sociétés affiliées de toutes responsabilités, réclamations et dépenses, y compris les honoraires d’avocat, découlant de ou en relation avec la violation du présent Contrat ou l’utilisation de Construct Arcade, par vous ou toute personne utilisant votre Compte, ou de ou en relation avec tout contenu généré par l’utilisateur, ou la création, la distribution, la promotion et l’utilisation de toute œuvre dérivée, créée ou fournie par vous ou toute personne utilisant votre Compte. Scirra se réserve le droit, à ses propres frais, d’assumer la défense et le contrôle exclusifs de toute question autrement sujette à indemnisation de votre part. Dans ce cas, vous n’aurez plus aucune obligation de fournir une indemnisation à Scirra dans cette affaire. Cette section concernant l’indemnisation survivra à la résiliation du présent contrat.
CONTENU GÉNÉRÉ PAR L’UTILISATEUR
Vous serez seul responsable du contenu que vous téléchargez sur l’Arcade et des conséquences de sa publication. Vous affirmez, déclarez et/ou garantissez que pour chaque fichier ou sous-fichier que vous téléchargez sur l’arcade, l’une des conditions suivantes est remplie, permettant le téléchargement, la publication et la distribution sur l’arcade :
Vous détenez l’intégralité des droits d’auteur sur ces fichiers
Vous avez l’autorisation écrite explicite du détenteur des droits d’auteur autorisant la distribution en vertu du présent Contrat d’utilisation
Vous disposez d’une licence permissive du détenteur des droits d’auteur autorisant la distribution en vertu du présent Contrat d’utilisation
Vous accordez par la présente à Scirra Ltd une licence mondiale, non exclusive, libre de droits, sous-licenciable et transférable pour utiliser, reproduire, distribuer, préparer des œuvres dérivées, afficher et exécuter les soumissions d’utilisateur en relation avec le site Web Construct.net et l’activité de Scirra Ltd (et de son successeur), y compris, sans limitation, pour la promotion et la redistribution d’une partie ou de la totalité du site Web Construct.net (et des œuvres dérivées de celui-ci) dans tous les formats de média et par tous les canaux de média. Cette licence que vous avez accordée prend fin une fois que vous avez supprimé votre jeu du site Web Construct.net avec un délai de grâce raisonnable par la suite pour nous permettre de faire de notre mieux pour supprimer tout contenu publié.
Vous accordez par la présente à chaque utilisateur de l’Arcade une licence non exclusive pour accéder à vos soumissions d’utilisateur via le site Web et pour utiliser, reproduire, distribuer, préparer des œuvres dérivées, afficher et exécuter ces soumissions d’utilisateur comme autorisé par la fonctionnalité du site Web et en vertu des présentes conditions d’utilisation. La licence susmentionnée que vous avez accordée prend fin une fois que vous avez supprimé ou effacé une soumission d’utilisateur de l’Arcade.
Vous acceptez de ne pas télécharger de jeux dont le contenu contient :
AGREEMENT
Le présent Accord d’utilisation (« Accord ») est un contrat juridiquement contraignant entre vous et Scirra Ltd. et avec notre société mère, nos filiales et sociétés affiliées (« Scirra », « Construct » ou « nous »).
Nous nous réservons le droit, à notre discrétion, de changer, modifier, ajouter ou supprimer des parties de l’Accord à tout moment en publiant l’Accord modifié sur notre Plateforme ou dans nos Services (par exemple via des avis dans le jeu). En cas de changement important, nous pouvons également fournir un avis supplémentaire en envoyant un e-mail ou un message dans les Services. Sauf indication contraire de notre part, les modifications entrent en vigueur immédiatement après leur publication. Chaque fois que vous accédez à nos Services, à la Plateforme ou à des Jeux de Plateformes tierces, la version alors en vigueur de l’Accord s’applique et vous acceptez que les modifications s’appliquent à votre utilisation continue des Services.
Le fait que vous n’annuliez pas votre compte ou ne cessiez pas d’utiliser nos Services après avoir reçu la notification de l’Accord modifié constituera votre acceptation des conditions modifiées. Si vous n’acceptez pas les modifications ou l’une des conditions du présent Contrat, votre seul recours est de résilier votre compte ou de cesser d’utiliser nos Services.
Si une partie du présent Contrat est jugée illégale ou inapplicable, le reste du Contrat ne sera pas affecté et continuera d’être pleinement valide, contraignant et applicable.
LITIGES
Tous les litiges doivent être réglés par les tribunaux du Royaume-Uni. Le présent contrat doit être interprété conformément aux lois du Royaume-Uni. Toutes les parties consentent par les présentes à la juridiction des tribunaux du Royaume-Uni. Si une partie du présent contrat est jugée inapplicable ou invalide par la loi, les autres parties du contrat resteront en vigueur.
INDEMNITÉ
Vous acceptez de défendre, d’indemniser et de dégager de toute responsabilité Scirra, ses concédants de licence et ses sociétés affiliées de toutes responsabilités, réclamations et dépenses, y compris les honoraires d’avocat, découlant de ou en relation avec la violation du présent Contrat ou l’utilisation de Construct Arcade, par vous ou toute personne utilisant votre Compte, ou de ou en relation avec tout contenu généré par l’utilisateur, ou la création, la distribution, la promotion et l’utilisation de toute œuvre dérivée, créée ou fournie par vous ou toute personne utilisant votre Compte. Scirra se réserve le droit, à ses propres frais, d’assumer la défense et le contrôle exclusifs de toute question autrement sujette à indemnisation de votre part. Dans ce cas, vous n’aurez plus aucune obligation de fournir une indemnisation à Scirra dans cette affaire. Cette section concernant l’indemnisation survivra à la résiliation du présent contrat.
CONTENU GÉNÉRÉ PAR L’UTILISATEUR
Vous serez seul responsable du contenu que vous téléchargez sur l’Arcade et des conséquences de sa publication. Vous affirmez, déclarez et/ou garantissez que pour chaque fichier ou sous-fichier que vous téléchargez sur l’arcade, l’une des conditions suivantes est remplie, permettant le téléchargement, la publication et la distribution sur l’arcade :
Vous détenez l’intégralité des droits d’auteur sur ces fichiers
Vous avez l’autorisation écrite explicite du détenteur des droits d’auteur autorisant la distribution en vertu du présent Contrat d’utilisation
Vous disposez d’une licence permissive du détenteur des droits d’auteur autorisant la distribution en vertu du présent Contrat d’utilisation
Vous accordez par la présente à Scirra Ltd une licence mondiale, non exclusive, libre de droits, sous-licenciable et transférable pour utiliser, reproduire, distribuer, préparer des œuvres dérivées, afficher et exécuter les soumissions d’utilisateur en relation avec le site Web Construct.net et l’activité de Scirra Ltd (et de son successeur), y compris, sans limitation, pour la promotion et la redistribution d’une partie ou de la totalité du site Web Construct.net (et des œuvres dérivées de celui-ci) dans tous les formats de média et par tous les canaux de média. Cette licence que vous avez accordée prend fin une fois que vous avez supprimé votre jeu du site Web Construct.net avec un délai de grâce raisonnable par la suite pour nous permettre de faire de notre mieux pour supprimer tout contenu publié.
Vous accordez par la présente à chaque utilisateur de l’Arcade une licence non exclusive pour accéder à vos soumissions d’utilisateur via le site Web et pour utiliser, reproduire, distribuer, préparer des œuvres dérivées, afficher et exécuter ces soumissions d’utilisateur comme autorisé par la fonctionnalité du site Web et en vertu des présentes conditions d’utilisation. La licence susmentionnée que vous avez accordée prend fin une fois que vous avez supprimé ou effacé une soumission d’utilisateur de l’Arcade.
Vous acceptez de ne pas télécharger de jeux dont le contenu contient :
Du contenu diffamatoire, discriminatoire ou mesquin, y compris des références ou des commentaires sur la religion, la race, l’orientation sexuelle, le sexe, l’origine nationale/ethnique ou d’autres groupes ciblés, en particulier si l’application est susceptible d’humilier, d’intimider ou de mettre en danger une personne ou un groupe ciblé. Les satiristes politiques et les humoristes professionnels sont généralement exemptés de cette exigence.
Des représentations réalistes de personnes ou d’animaux tués, mutilés, torturés ou maltraités, ou du contenu qui encourage la violence
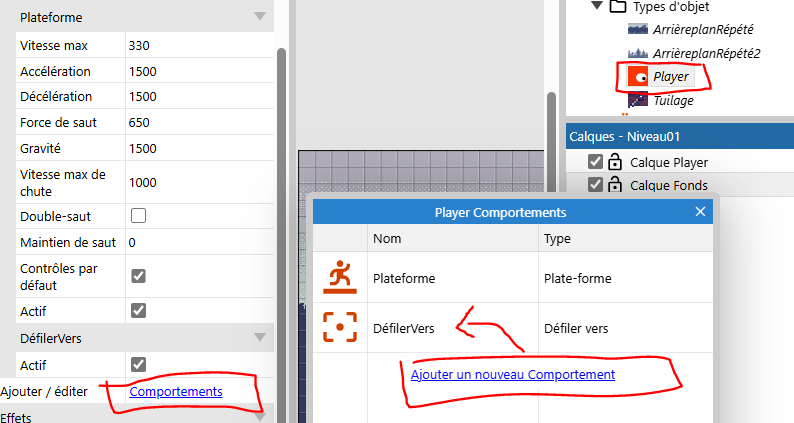
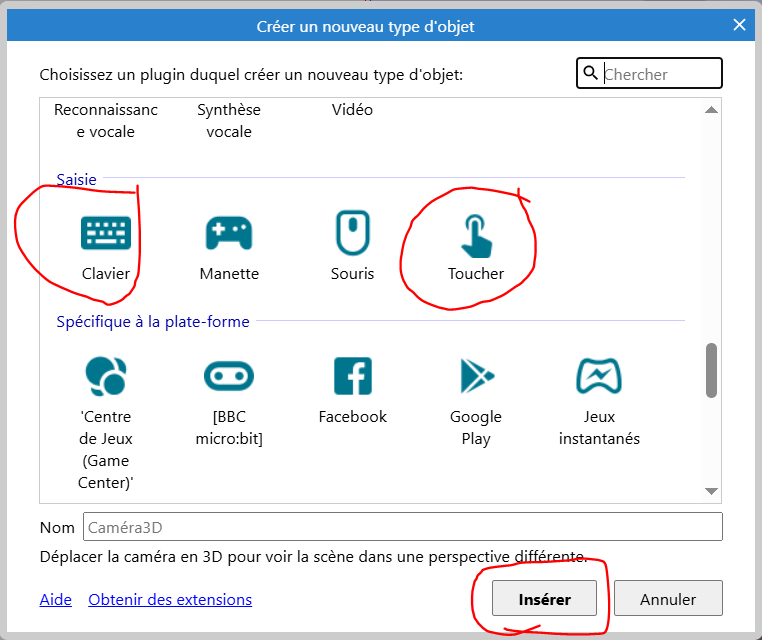
Sur l’onglet Niveau01 demande par le clic droit Insérer un nouvel objet puis choisis Clavier puis Toucher :
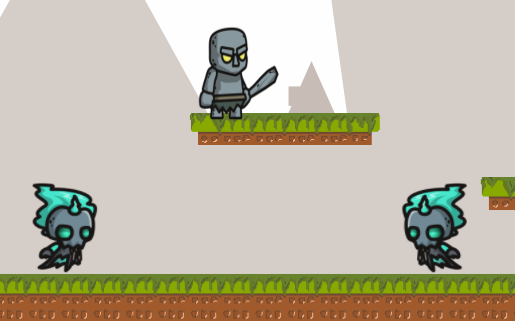
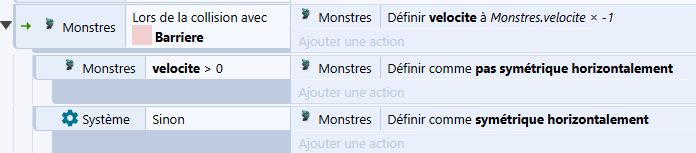
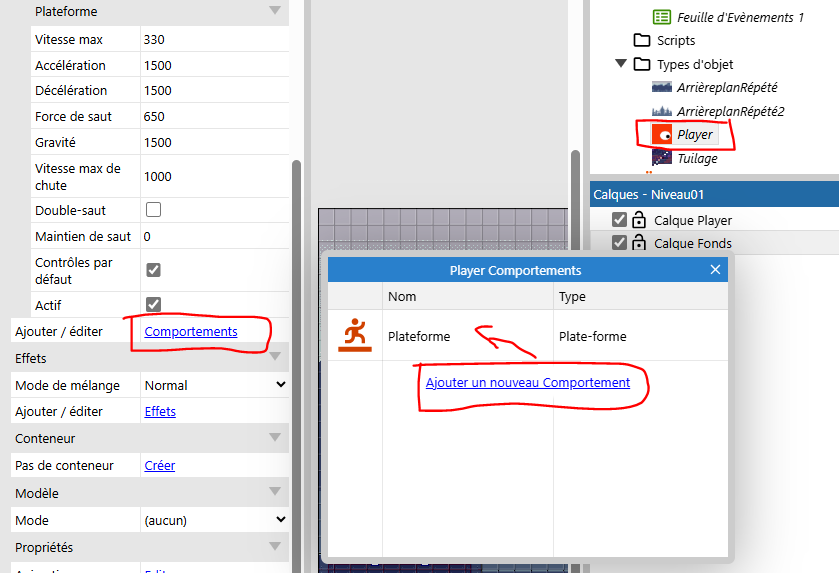
Ton joueur marche, attend, saute, chute. Mais tu constates quand to joueur marche, il ne va que dans un sens vers la droite mais ne se retourne pas vers la gauche. Tu vas récupérer les touches du clavier pour indiquer le sens de la marche.
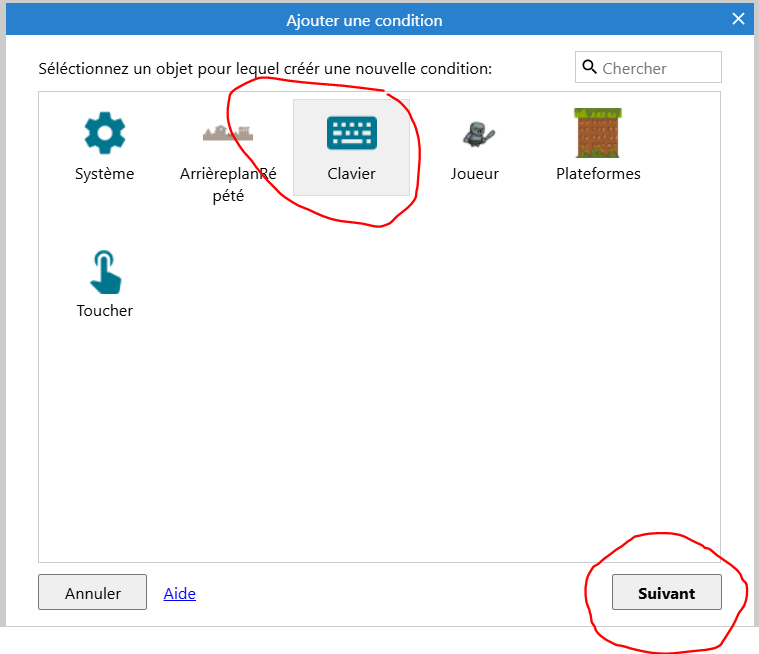
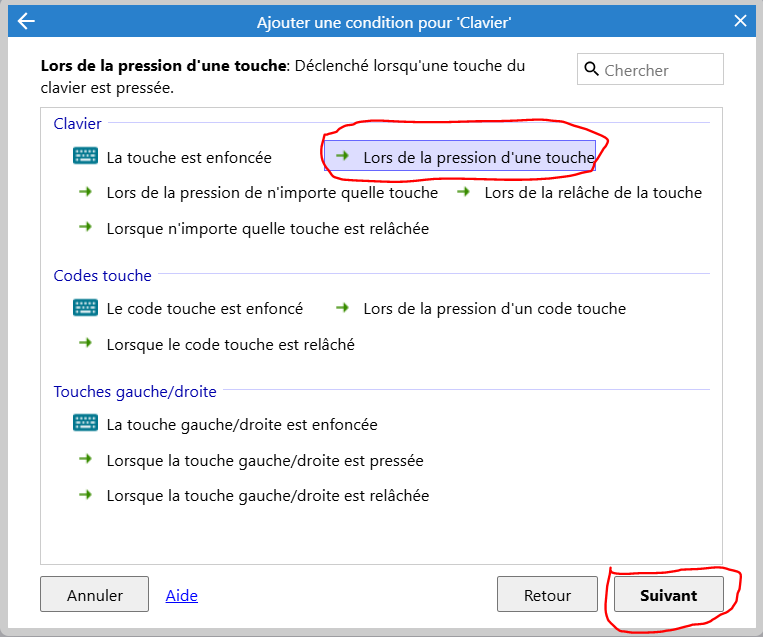
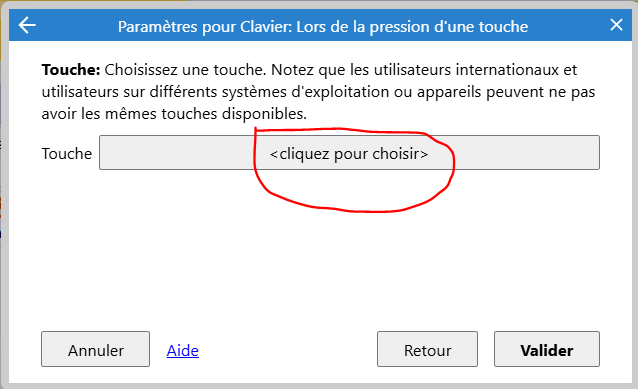
Puis choisis Lors de la pression d’une touche :
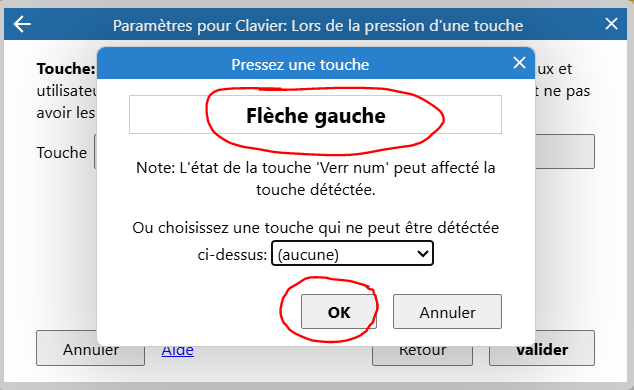
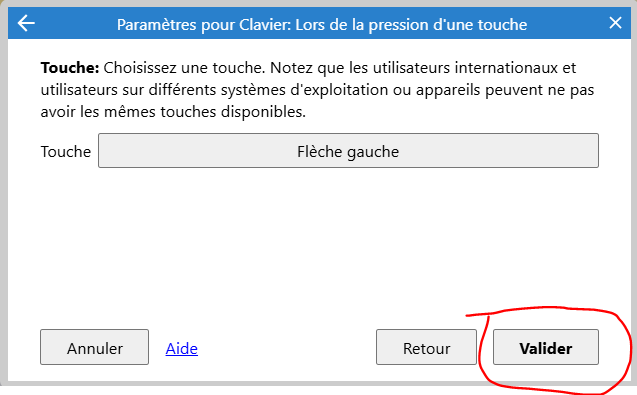
Puis appuis sur la touche de ton clavier pour indiquer la direction gauche :
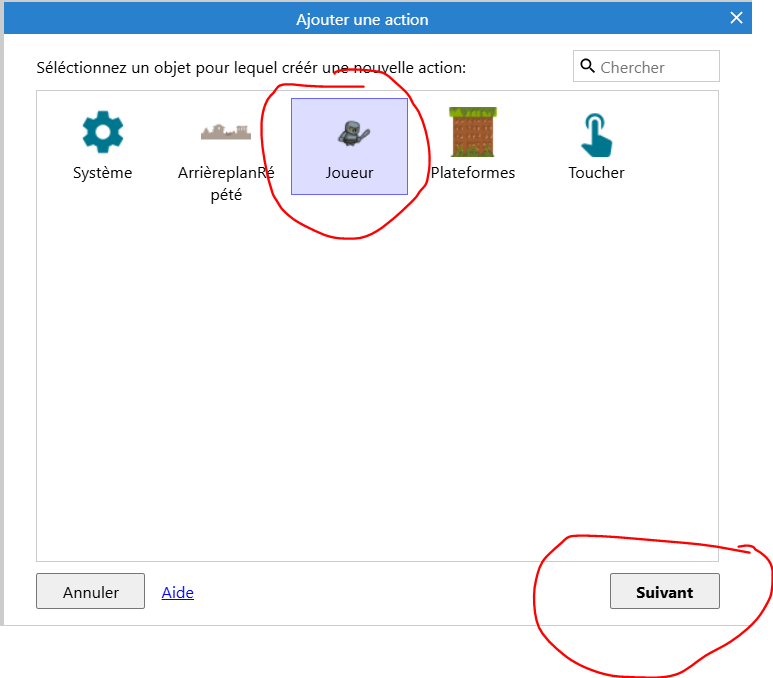
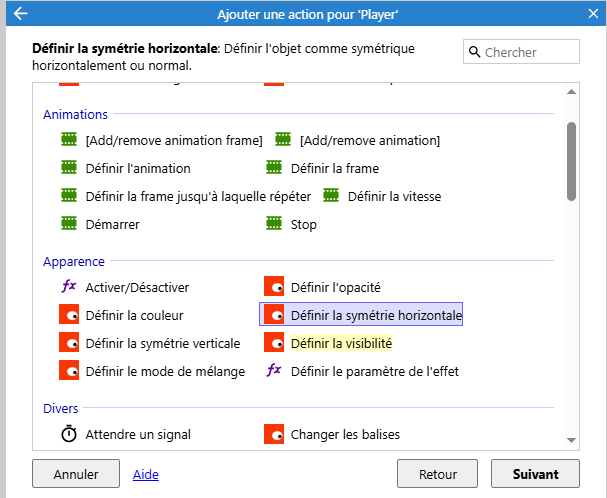
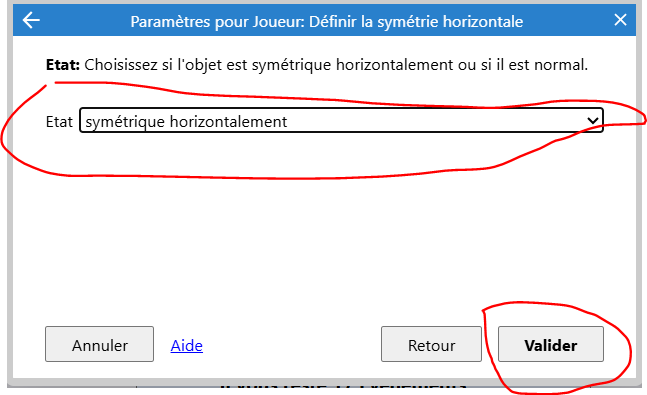
Dans action tu vas inverser l’image :
Dans la paragraphe Apparence, tu choisis de Définir la symétrie horizontale :
Dans le cadre de notre participation à la RoboCup Junior, notre association a organisé la conception et la programmation de robots adaptés pour la compétition. Ce rapport détaille notre organisation, les rôles de chacun, et les étapes de notre travail pour préparer la compétition.
Présentation des Équipes
Notre association présente 7 équipes composées d’enfants âgés de 8 à 16 ans. Les équipes sont organisées en fonction de l’âge et des compétences des participants :
Les plus jeunes (8-14 ans) travaillent sur une base de robot MBOT avec une programmation en mode block. Les moins expérimentés optent pour RESCUE LINE ENTRY, les plus expérimentés pour RESCUE LINE.
L’équipe des plus grands (14-16 ans) choisissent de réaliser leur propre robot en utilisant le langage Python pour la RESCUE LINE.
Répartition des Tâches
Travail des Plus Jeunes
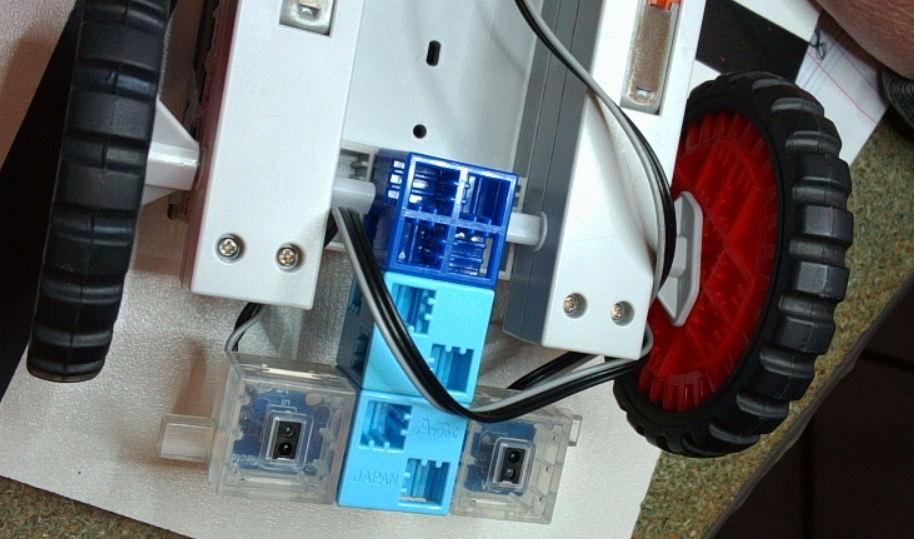
Les moins expérimentés se sont concentrés sur la programmation en mode block, ce qui leur a permis de comprendre les bases de la programmation et de la robotique. Ils ont travaillé sur des tâches simples mais essentielles, comme le déplacement du robot, la détection de couleurs et le suivi de ligne. Ils sont utilisés différents robots au plus simple jusqu’au MBOT :
Un robot avec deux capteurs de suivi de ligne :
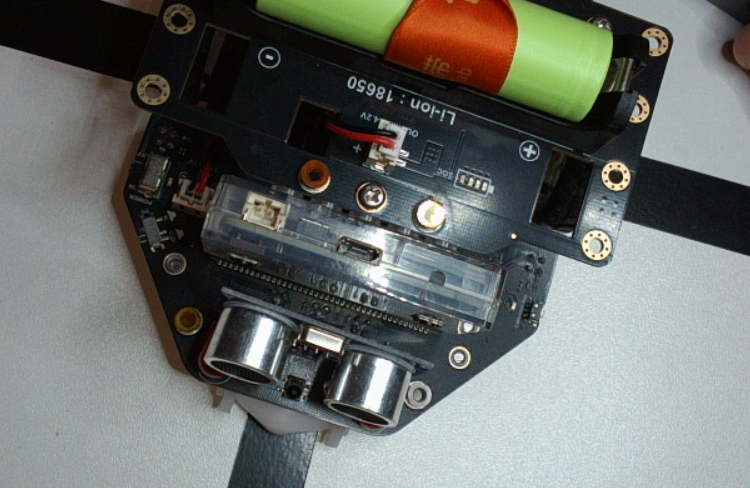
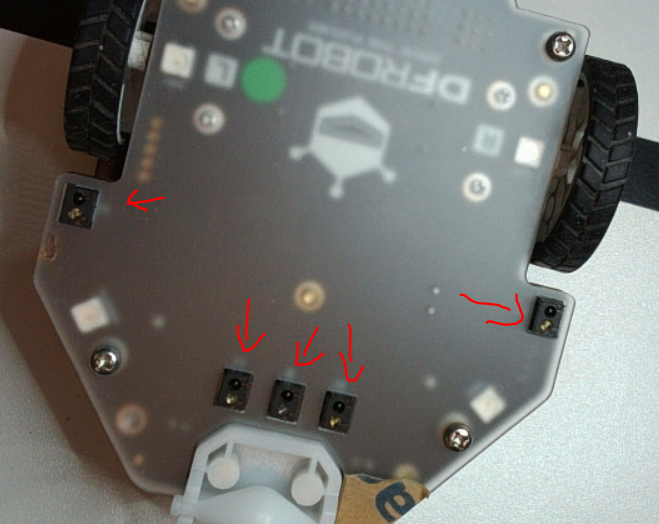
Puis un robot avec cinq capteurs de suivi de ligne
Travail des plus expérimentés
Les plus expérimentés ont pris en charge la compréhension des problématiques techniques et l’élaboration de solutions pour la conception des robots. Ils ont travaillé sur des aspects plus complexes, comme la gestion du capteur de ligne, l’équilibrage du robot et l’optimisation globale des performances du robot en fonction des exigences du parcours pour la compétition de la Robocup junior.
Collaboration et Tests
Travail en Commun entre les différentes équipes
Bien que les plus grands aient été principalement responsables de la conception technique, un travail en commun a été essentiel. Les solutions techniques élaborées par les plus grands ont été testées par tous les membres des équipes. Cela a permis de valider les solutions et de faire des choix éclairés sur les meilleures options à adopter.
Tests et Validation
Nous avons organisé des sessions de tests régulières où chaque équipe pouvait tester les solutions proposées. Les retours des plus jeunes ont été précieux pour ajuster et améliorer les solutions techniques. Cette collaboration a permis de s’assurer que les robots étaient performants et prêts pour la compétition.