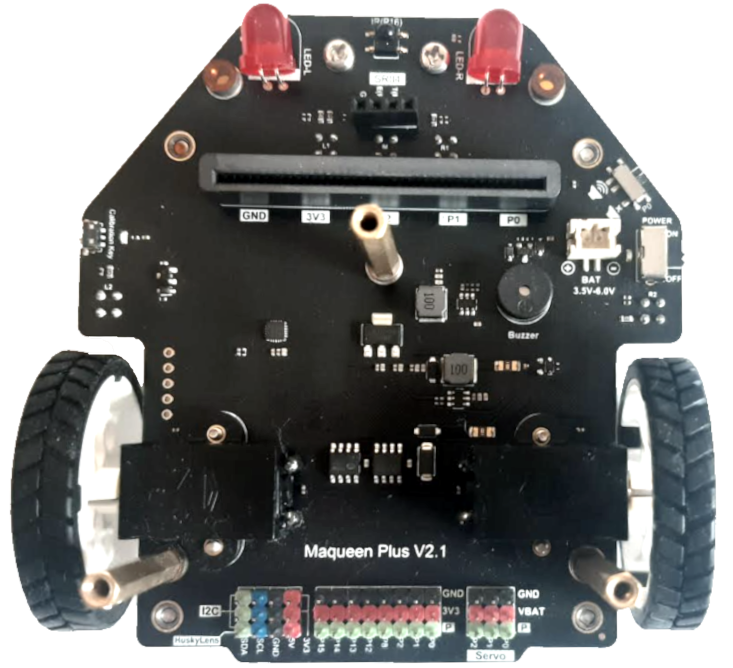
Le Maqueen Plus V2
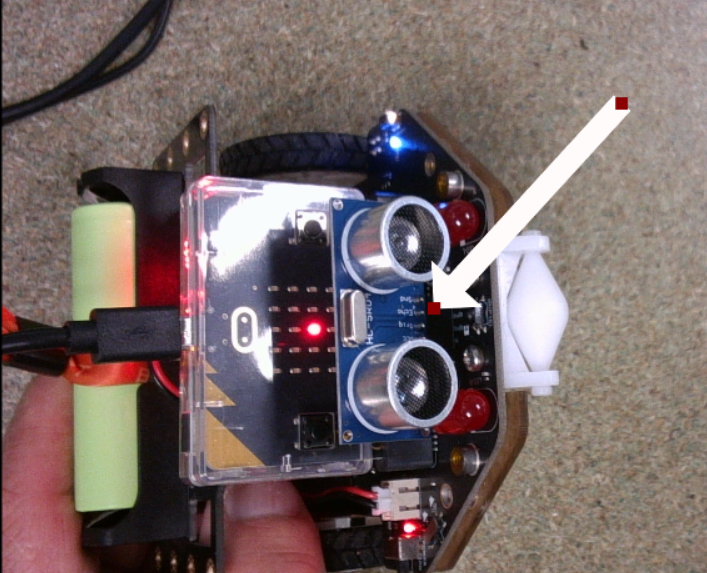
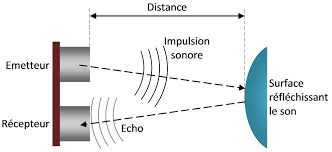
| Caractéristiques : 5 capteurs de suivi de ligne (sorties analogiques et digitales), calibration automatique via bouton-poussoir 2 LEDs frontales rouges 4 LEDS RGB Néopixels Capteur de distance ultrason HC-SR0 4Buzzer pour effets sonores 2 motoréducteurs N20 :vitesse de rotation nominale : 266 tr/minmodulation PWM rapport de réduction: 1:75 Capteur infrarouge permettant au robot d’être télécommandé Port d’extension GPIO : 8 ports : P0 P1 P2 P8 P12 P13 P14 P15 avec 3,3V 3 ports pour servomoteur : P0 P1 P2 avec Vbat 2 Ports I2C 3.3V1 Port I2C 5V Alimentation par batterie Li-Ion 18650 3.7V 3500 mAh avec circuit de chargement Tension de charge : 5 V, temps de charge : 4 heures, indicateur du niveau de charge : 4 LED Dimensions du produit : 14 x 101 x 70 mm | 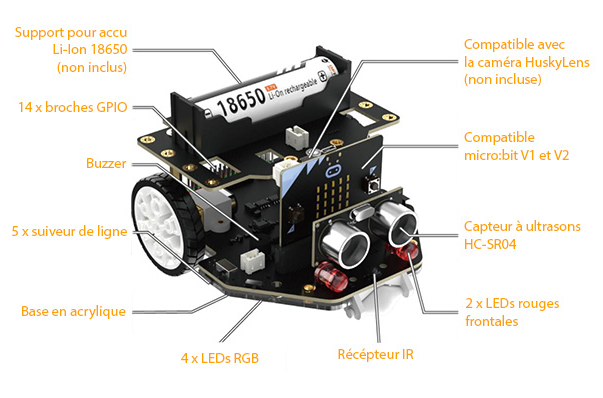 |
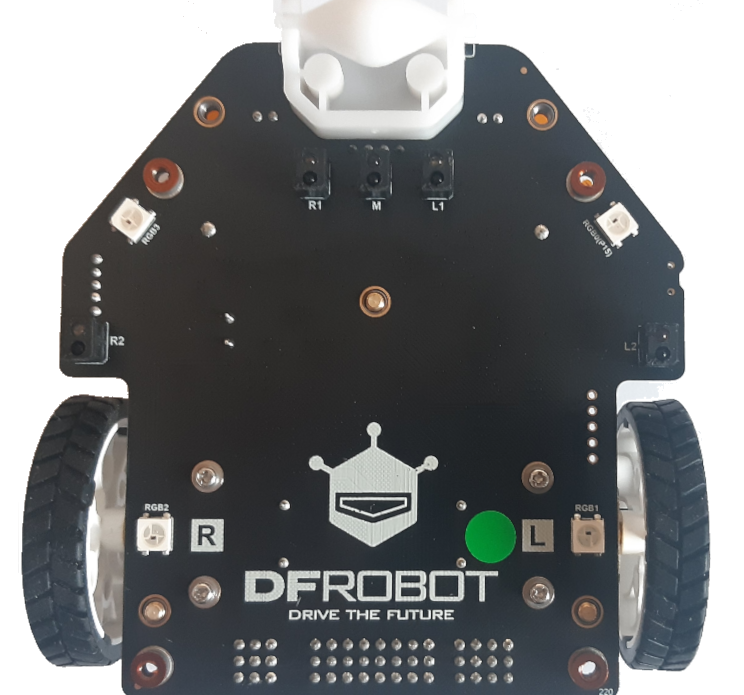
| Le robot dispose à l’avant de 5 capteurs optiques infrarouge. | 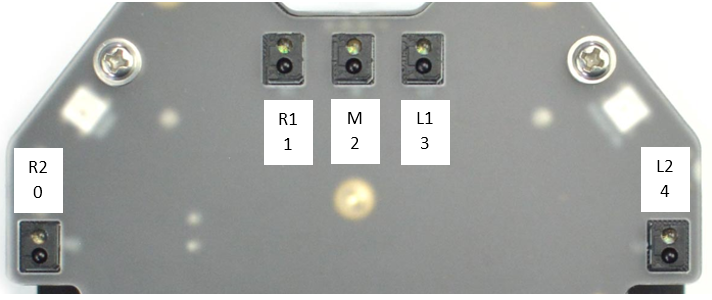 |
| Fonctionnement d’un capteur optique infrarouge | |
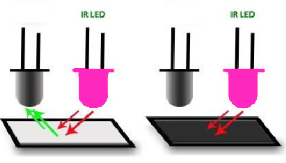 | Le capteur optique infrarouge est constitué : d’une LED infrarouge d’un photo-transistor Le capteur envoie un signal haut lorsqu’il détecte le noir et un signal bas quand il détecte le blanc. |
Pour le programmer
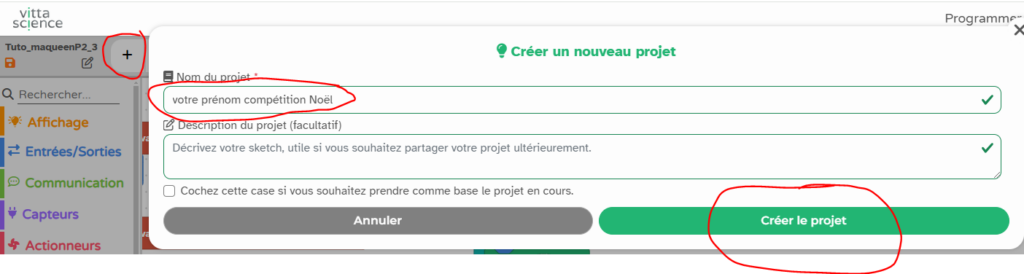
Va sur le site vittascience : fr.vittascience.com

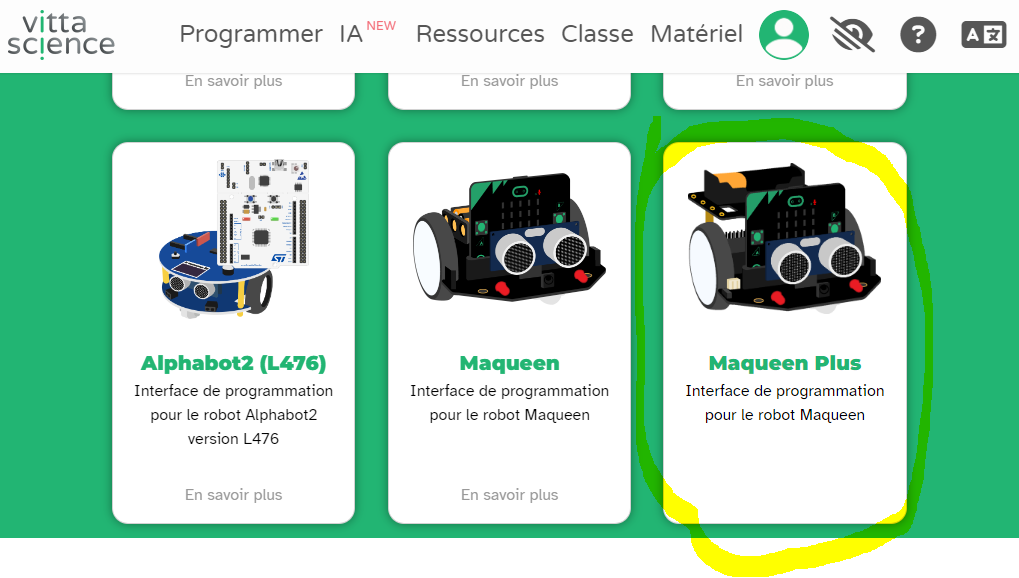
Choisis « Programmer »

Puis fais défiler ton écran pour choisir le robot Maqueen Plus
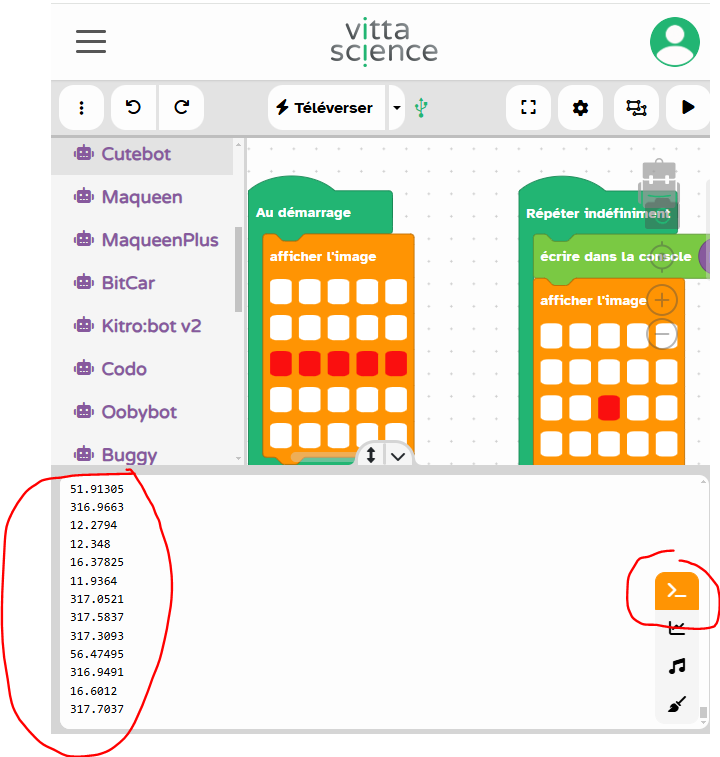
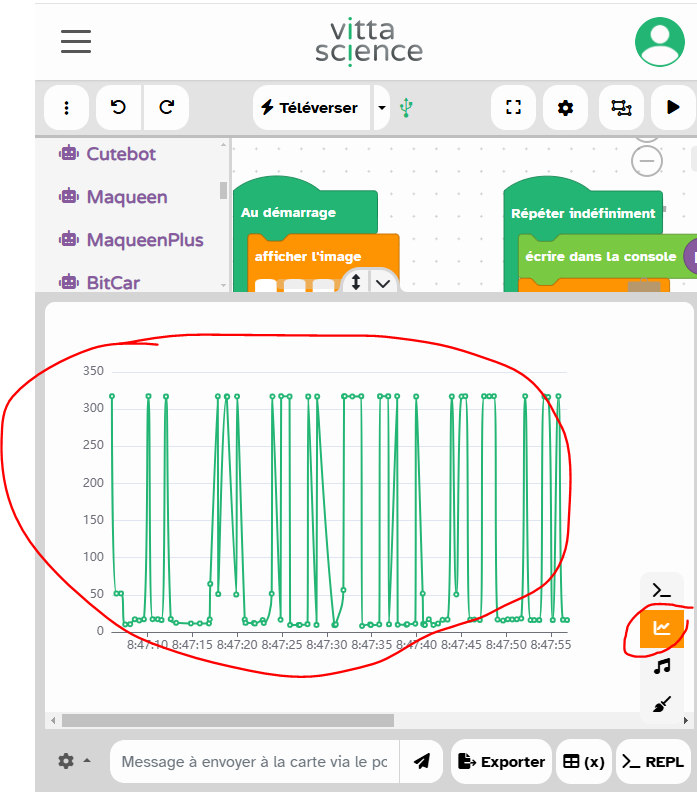
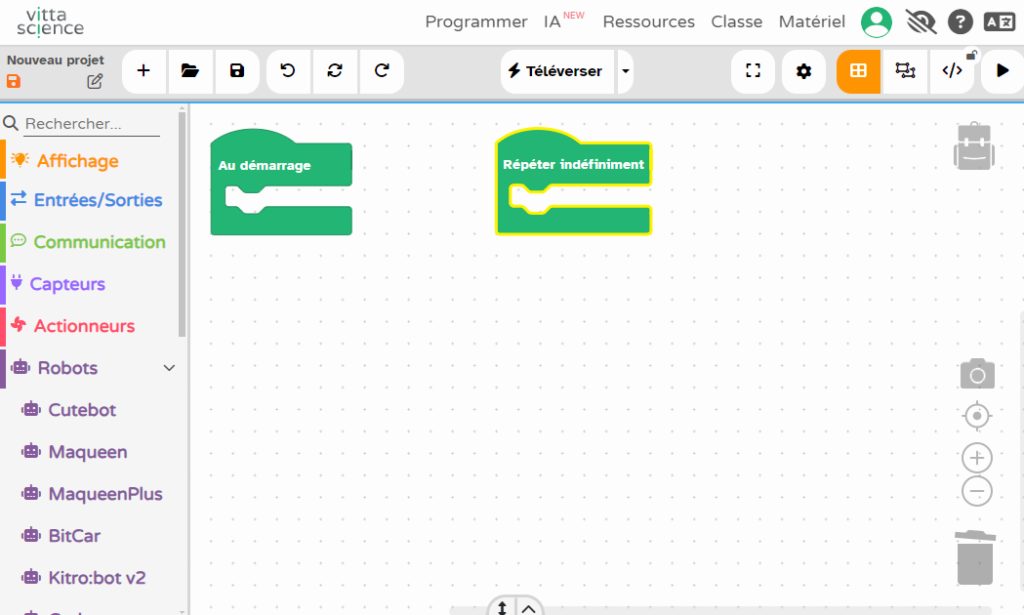
Choisis le mode Bloc et agrandis ton écran en baissant la console du bas :

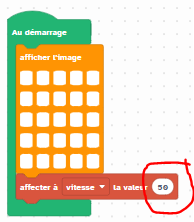
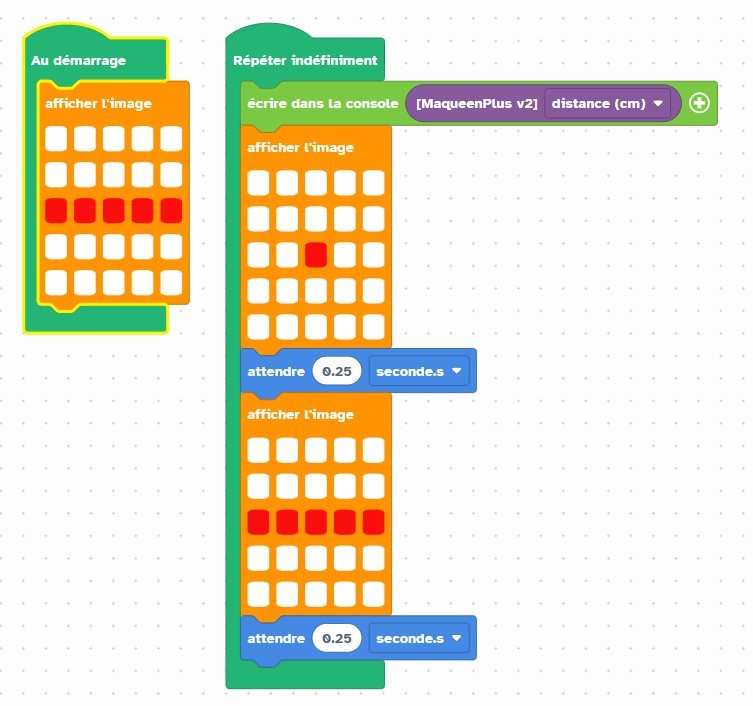
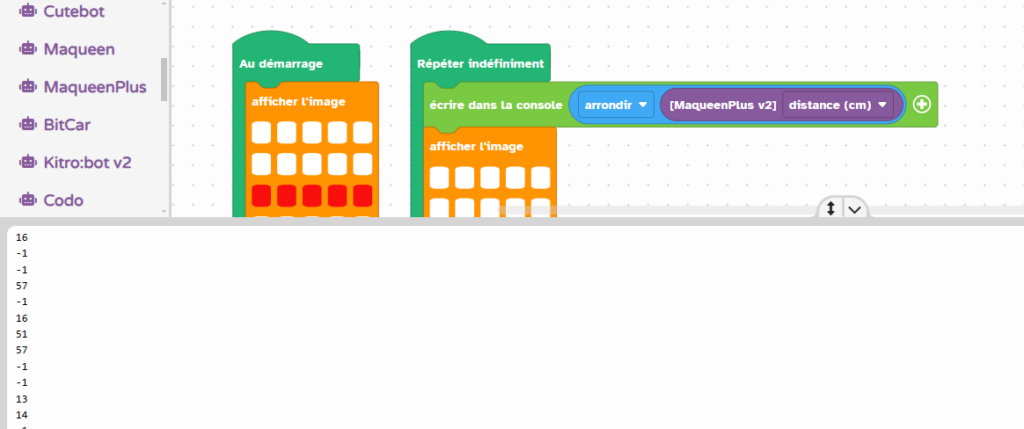
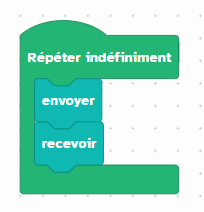
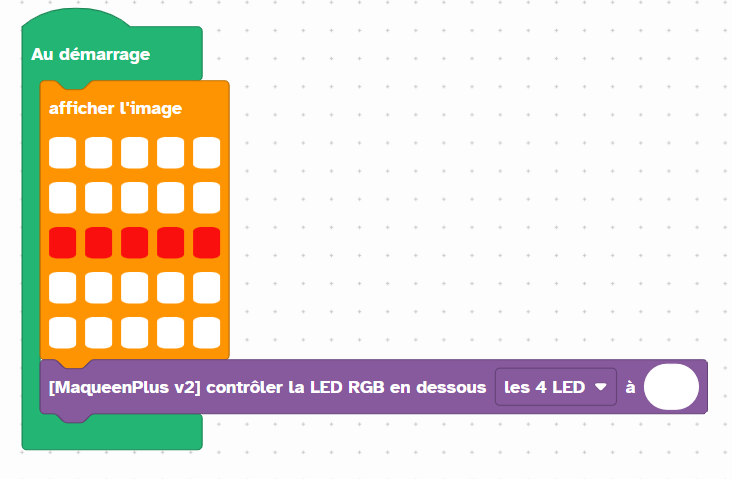
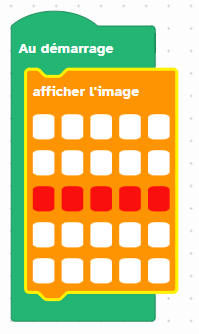
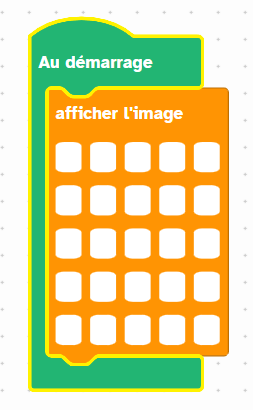
Pour gérer le tableau de LED de la carte microbit utilise l’instruction « afficher l’image » sous Affichage :
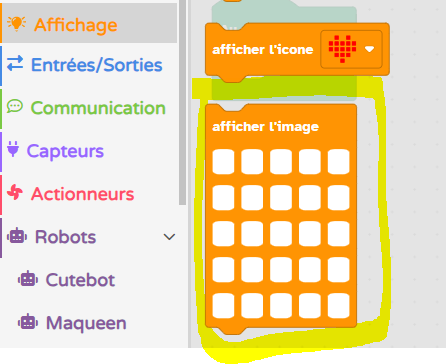
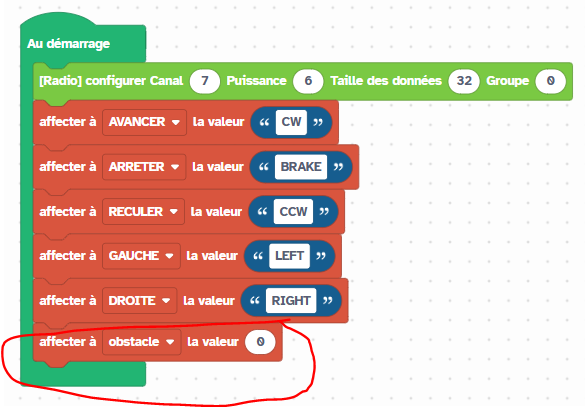
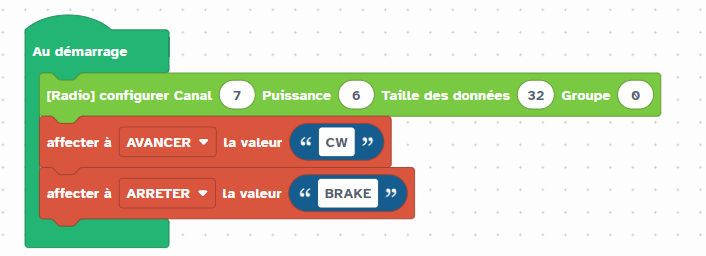
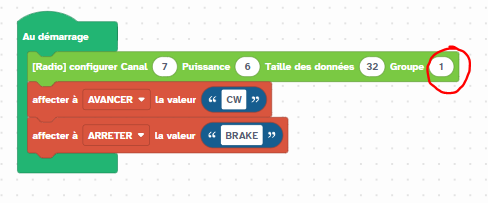
Par exemple allume les LEDs de la manière suivante dans « Au démarrage » :
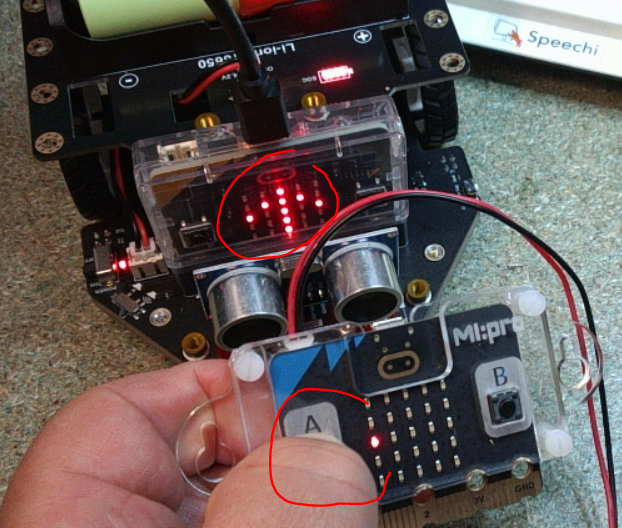
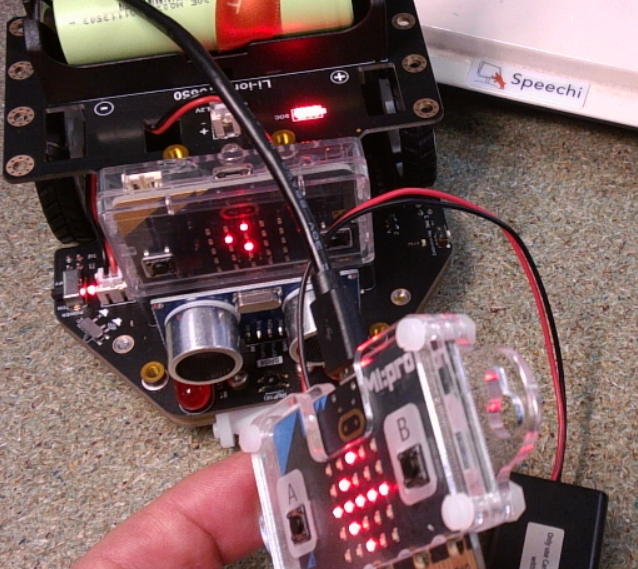
Tu peux tester en demandant à Téléverser sur la carte :

Demande la connexion avec la carte puis valide le transfert.
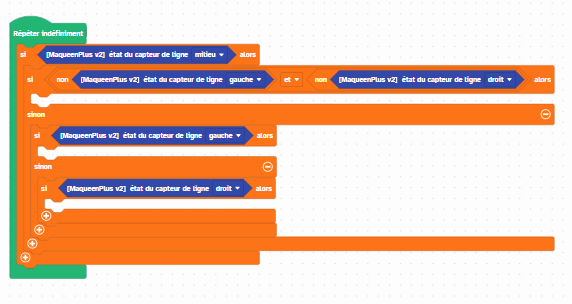
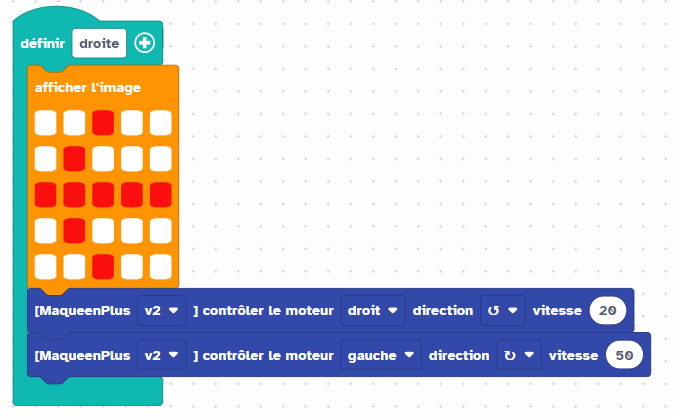
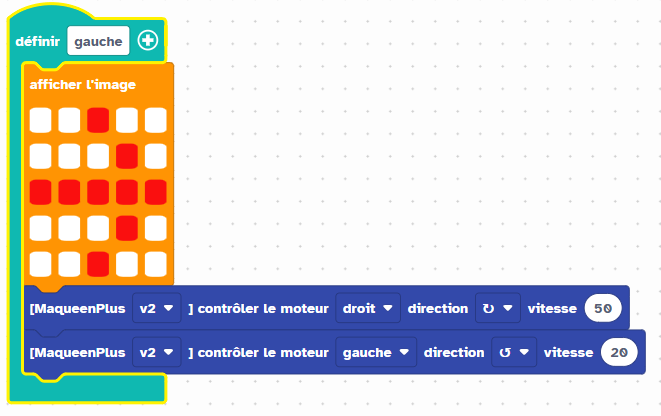
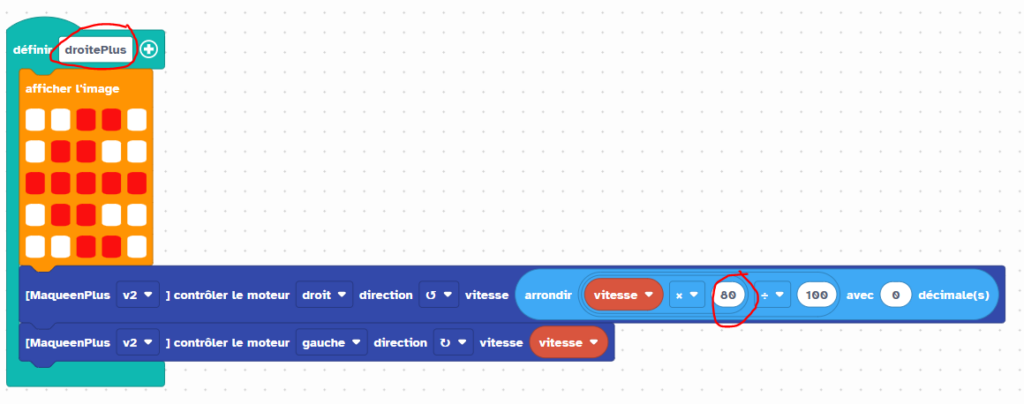
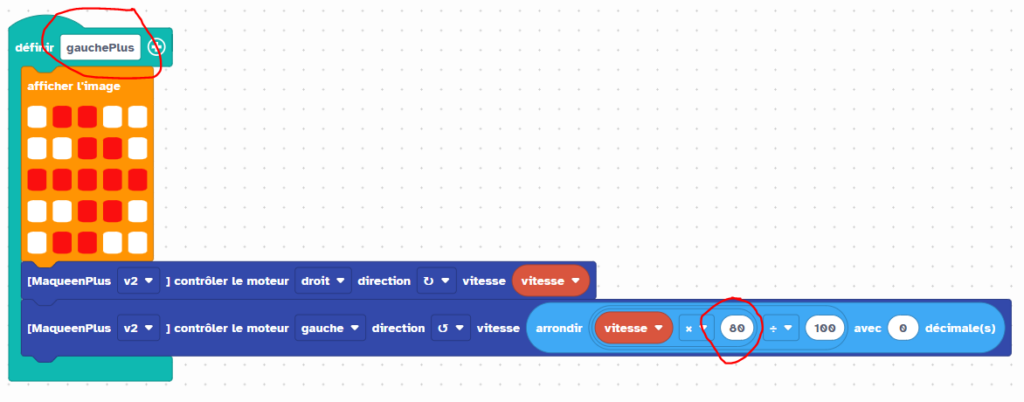
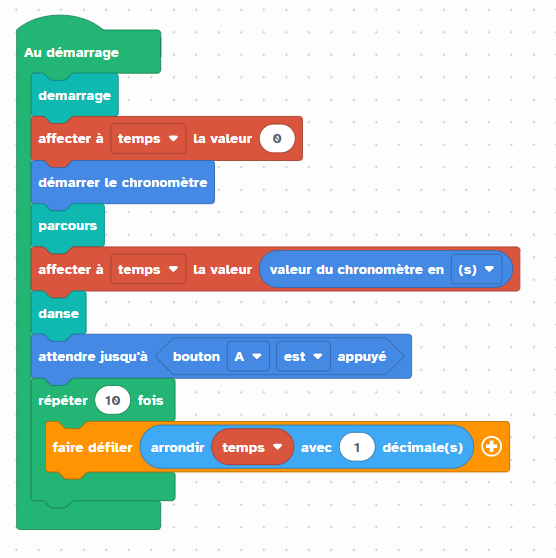
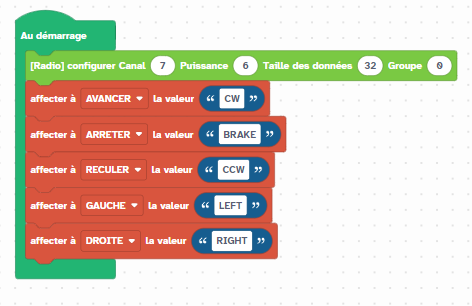
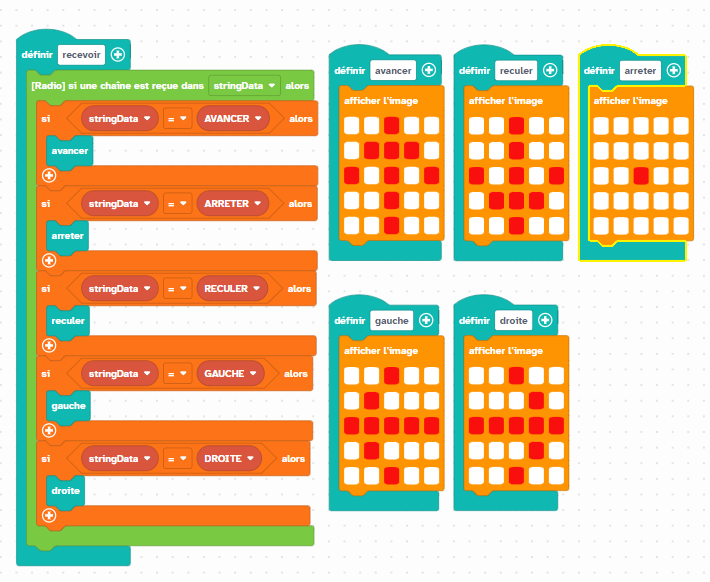
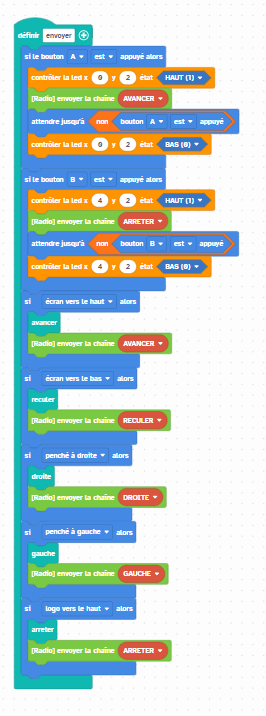
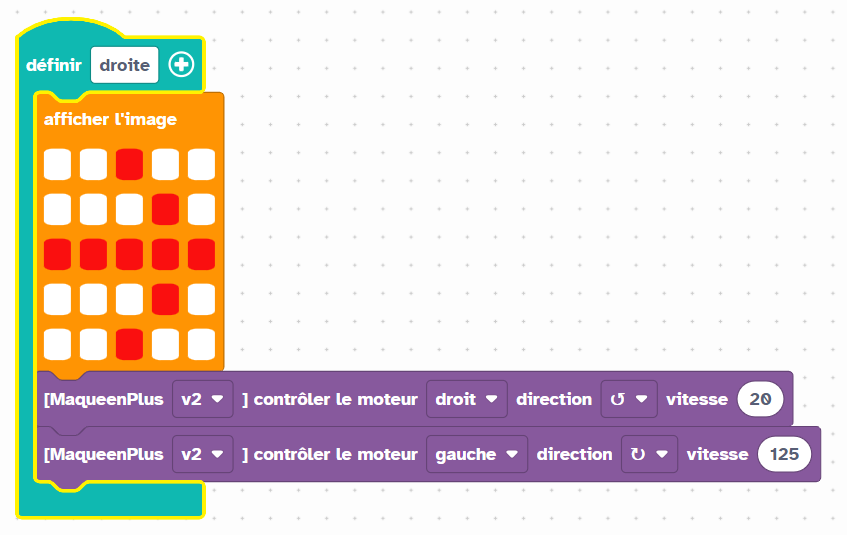
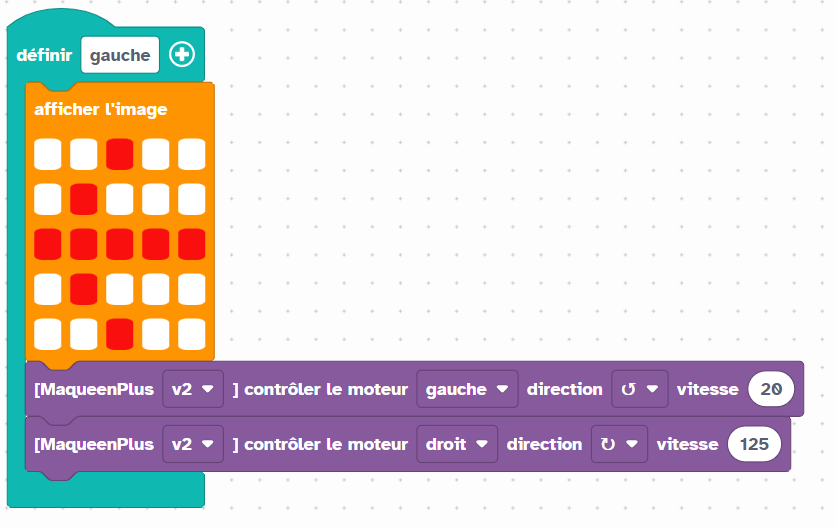
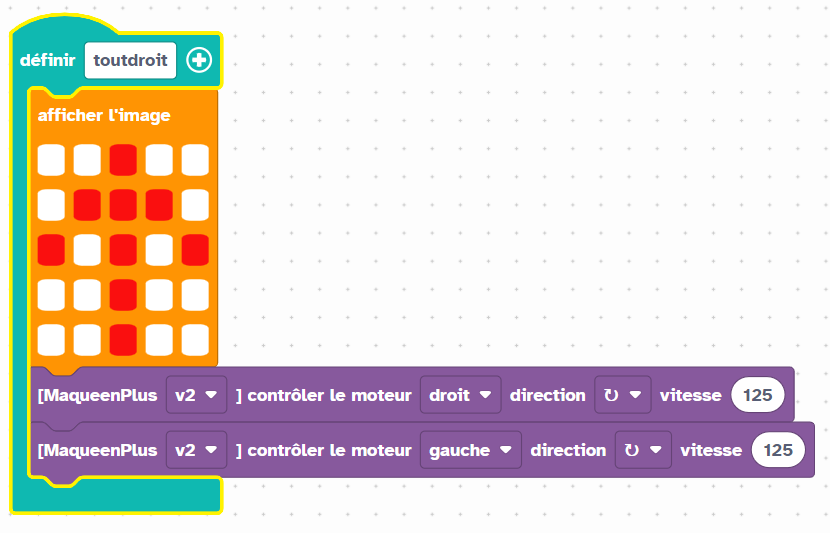
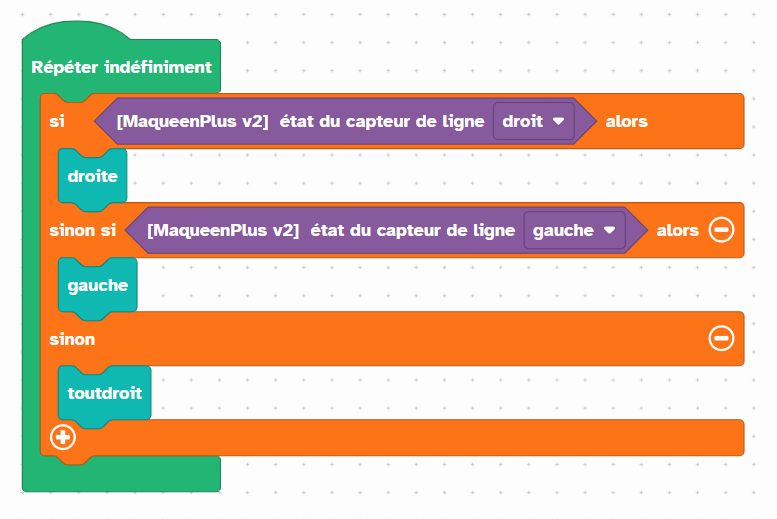
Tu utilises les instructions suivantes pour le suivi de la ligne noire.
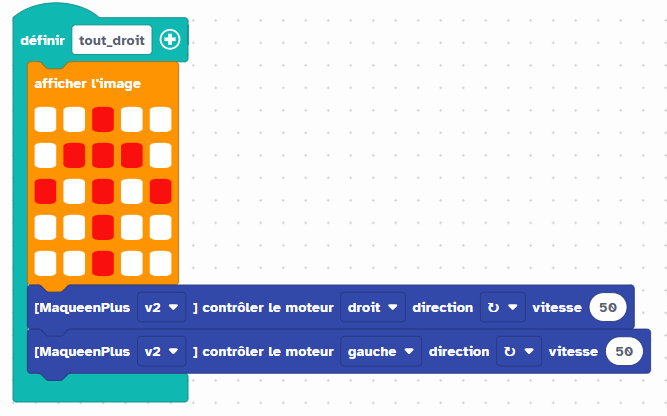
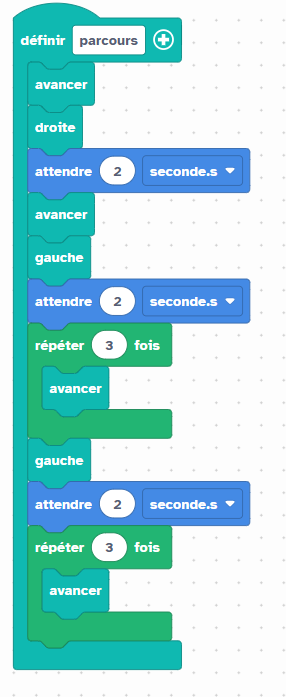
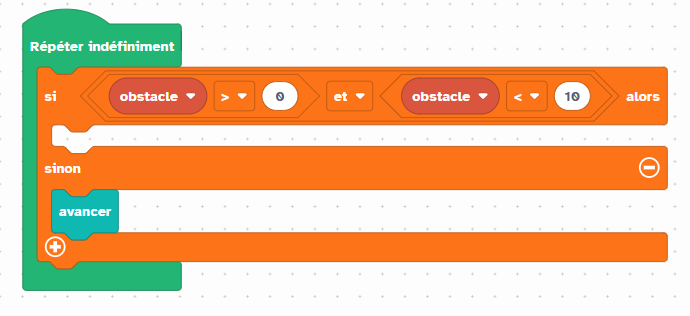
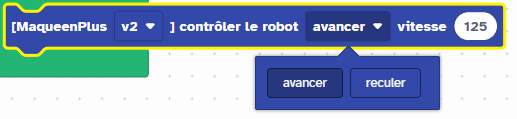
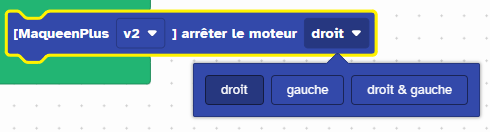
Pour faire avancer ton robot :

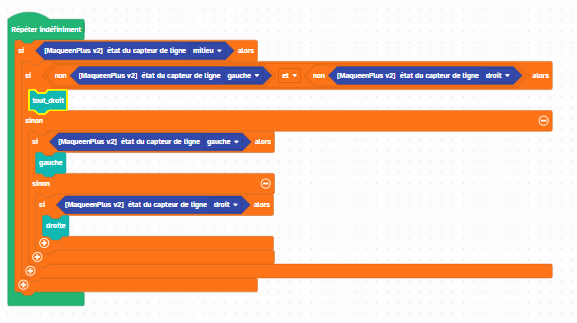
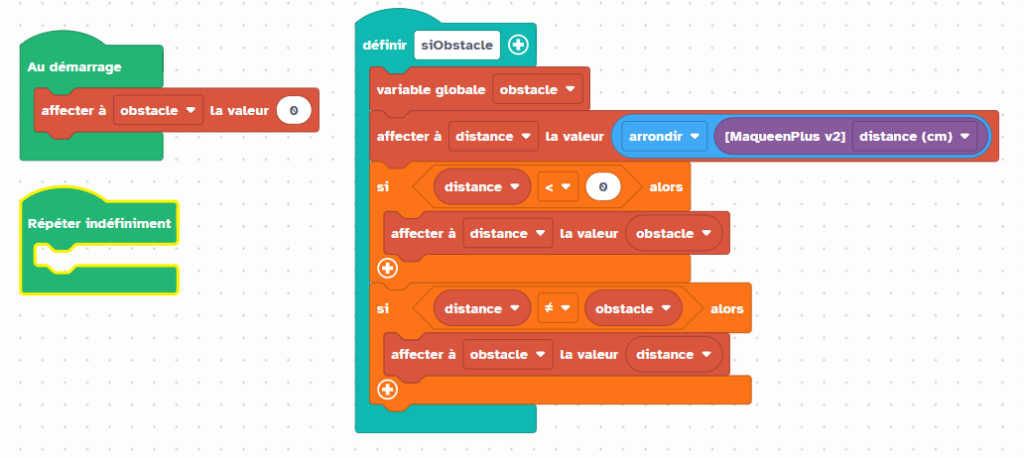
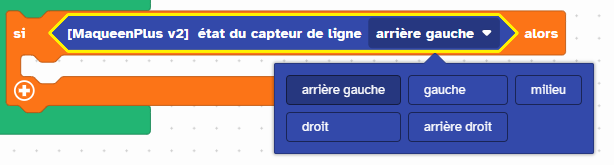
Pour détecter la ligne noire :
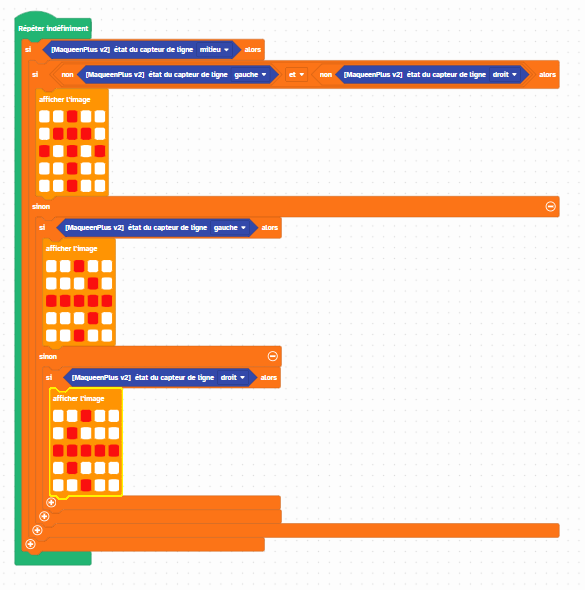
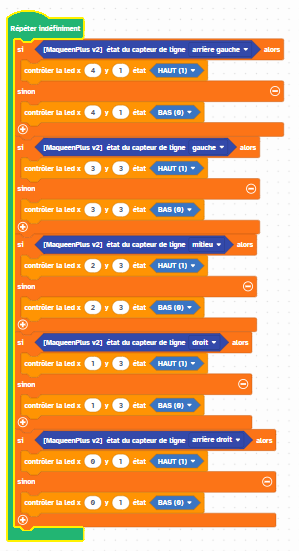
Programme pour vérifier que ton robot détecte bien la ligne noire :
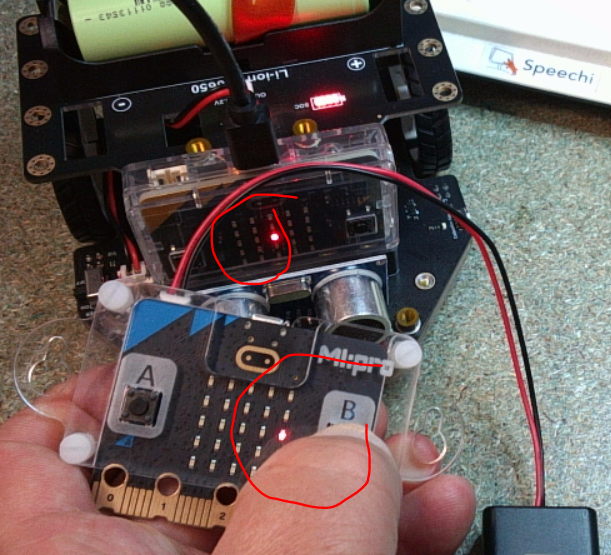
Téléverse ton programme :

Puis teste si la LED correspondante s’allume lorsque le phot réflecteur passe sur la ligne noire ? :

Comment calibrer le Maqueen Plus ?
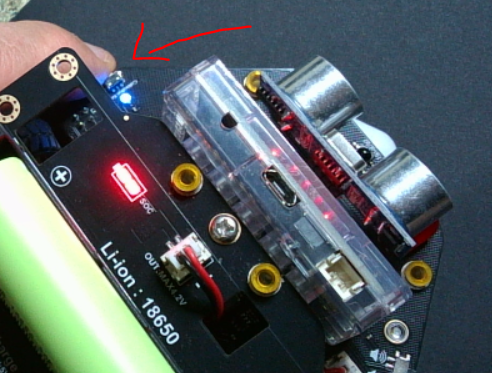
5 capteurs de suivi de ligne sur Maqueen Plus ont chacun une LED bleue qui indique l’état.
Si vous constatez qu’un capteur de suivi de ligne n’est pas sensible à une ligne noire, calibrez-le comme suit :
1. Mettez Maqueen Plus dans la zone d’étalonnage, une feuille noire par exemple. Le mettre sous tension
2. Appuyez sur « Calibration-key » pendant environ 1 seconde, les 2 grandes LED avant clignoteront en vert. Relâchez la touche, puis l’étalonnage est terminé.