Améliore ta programmation pour des passages très difficile en utilisant les capteurs arrière gauche et droit :
Quand le capteur arrière droit ou gauche détecte la ligne noire, on peut supposer que le robot est sur une courbe prononcée ou un angle droit de la ligne noire. Afin que le robot puisse suivre la ligne noire, donne la possibilité au robot de tourner plus rapidement sur la détection des capteurs arrière droit ou gauche.
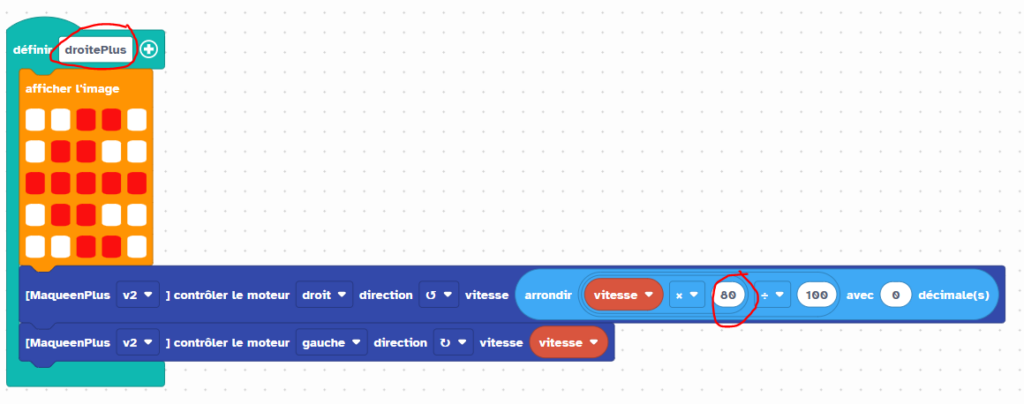
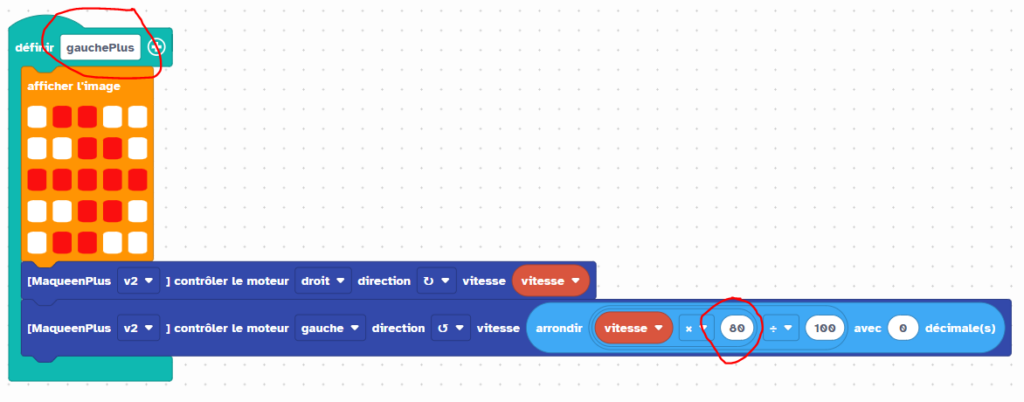
Rajoute des fonctions pour tourner plus droitePlus et gauchePlus qui vont pouvoir suivre la courbe en angle droit :
Puis modifie ton programme pour prendre en compte les capteurs arrière droit et arrière gauche :
Puis téléverse ton programme pour tenter un parcours difficile :
Apprend à utiliser le photo réflecteur IR pour suivre une ligne noire :
Arrêter le robot sur la ligne noire
Programme pour que ton robot s’arrête sur la ligne noire :
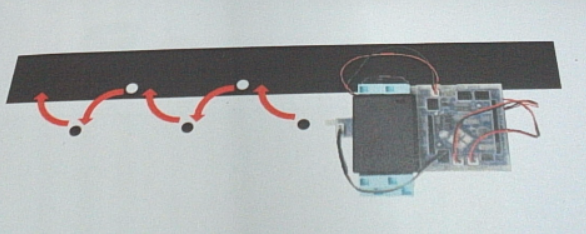
Utilise ces instructions pour que ton robot avance jusqu’à la ligne noire :
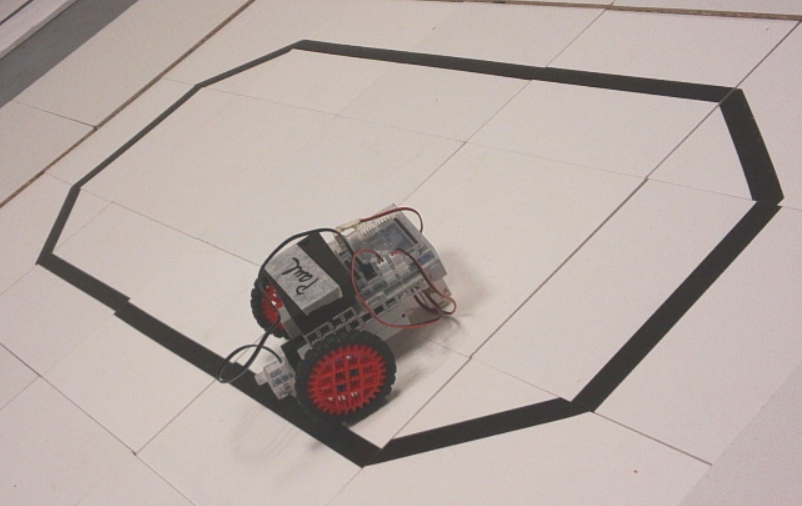
Le robot reste dans le cadre
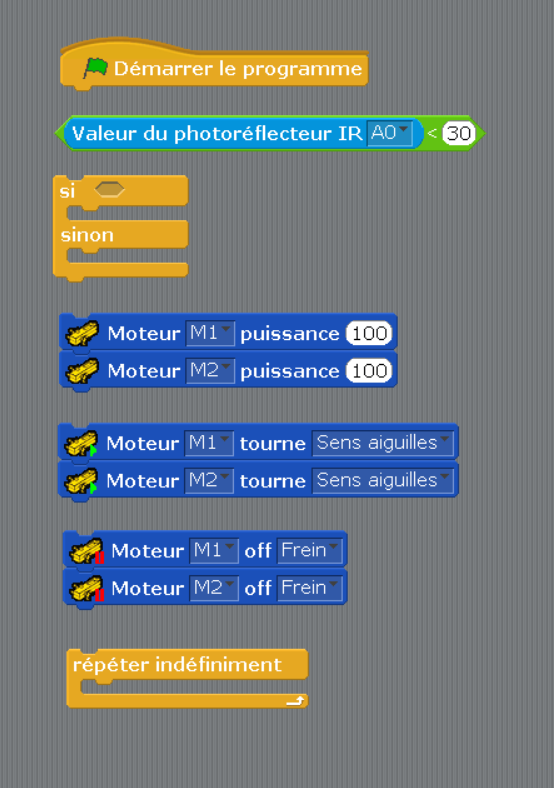
Programme ton robot pour qu’il reste dans le cadre de la ligne noire :
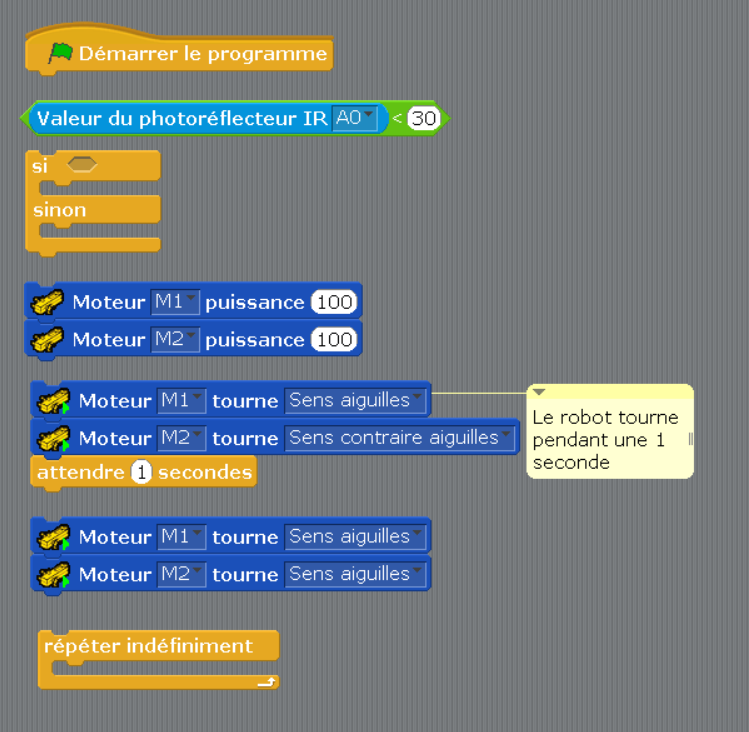
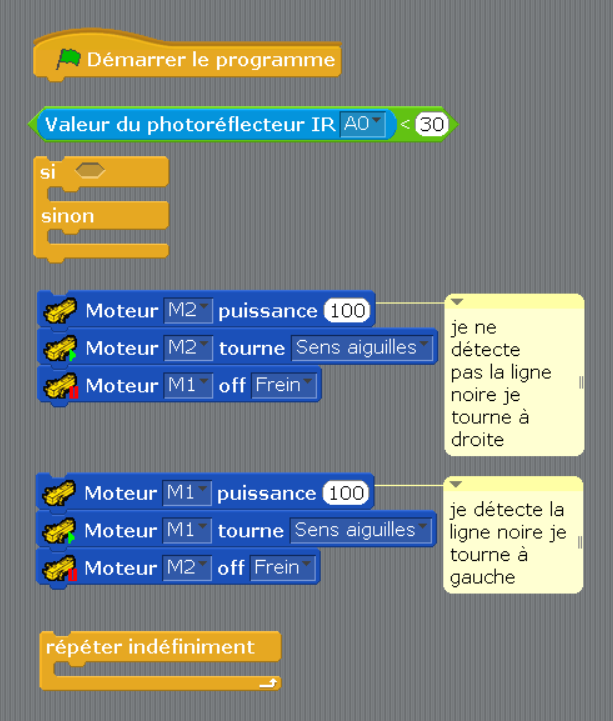
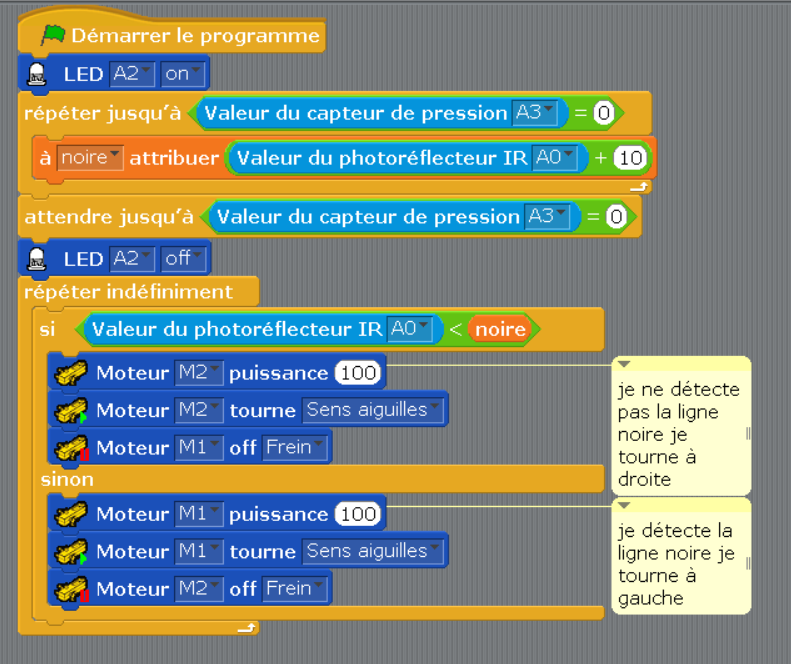
Utilise ces instructions pour que ton robot tourne dès qu’il détecte une ligne noire :
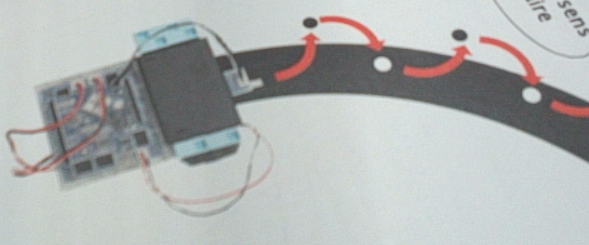
Le robot suit la ligne noire
Programme ton robot pour qu’il suive la ligne noire sur ce principe :
Le robot apprend la couleur noire
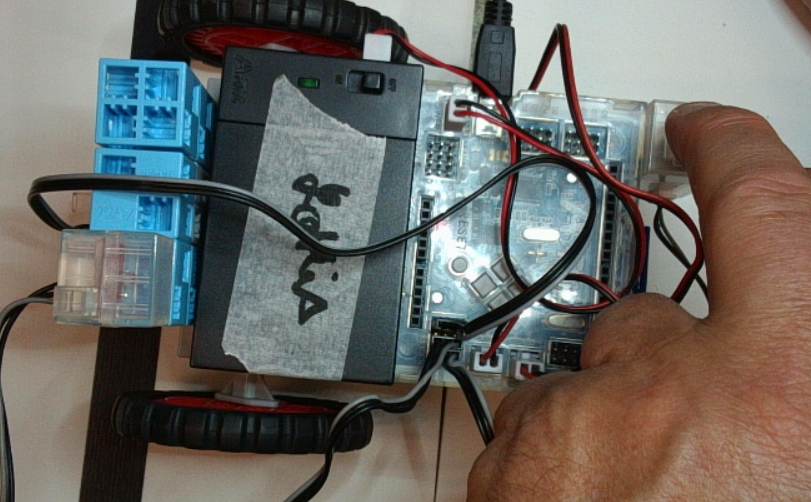
Rajoute à ton robot un capteur de pression et une LED : avant le suivi de ligne, tu poses ton robot sur la ligne noire puis par un appuie sur le capteur de pression, tu demandes au robot de mémoriser la couleur noire.
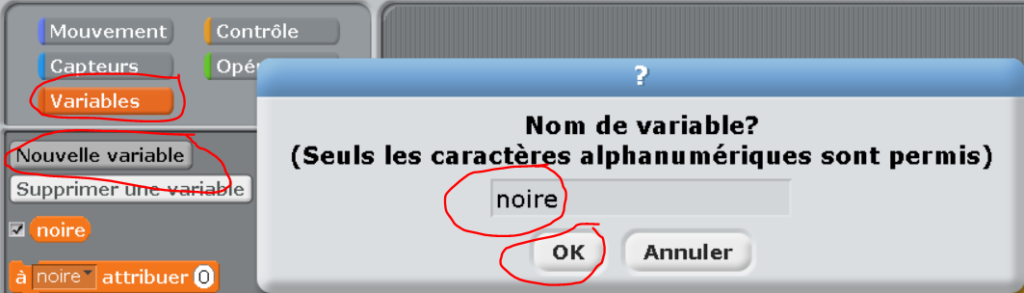
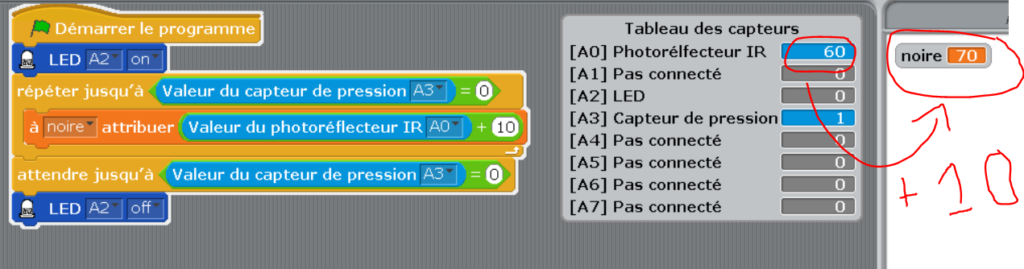
Crée une variable noire pour stocker la valeur retournée par le photo réflecteur lorsque le robot est posé sur la ligne noire :
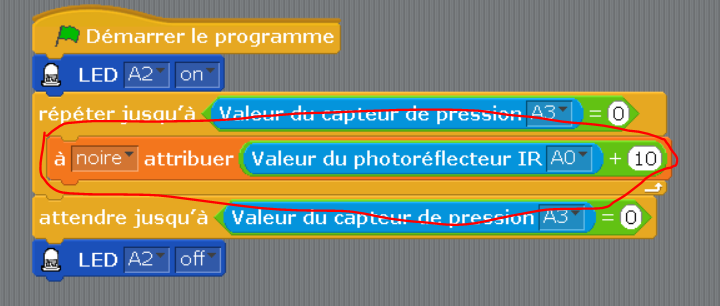
Puis programme pour mémoriser la valeur retournée par le photo réflecteur dans la variable noire :
Passe en mode test et constate comment la variable noire change :
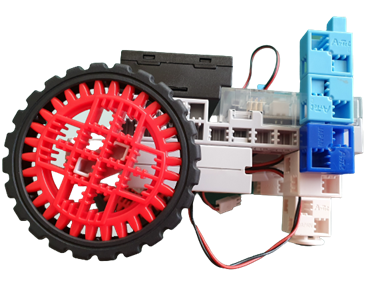
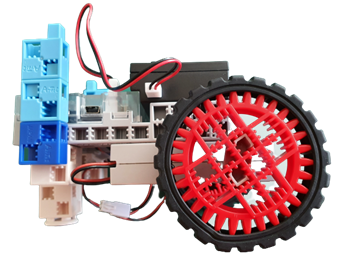
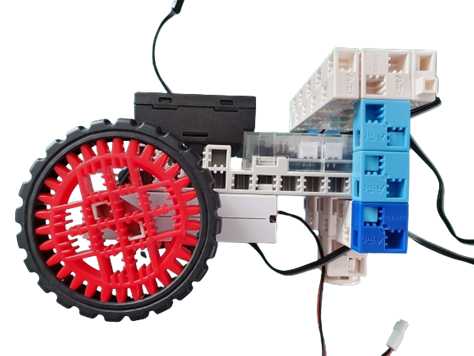
Voici un exemple d’une programmation SCRATCH avec un robot Algora qui passe le parcours le plus difficile en utilisant deux photoréflecteurs.
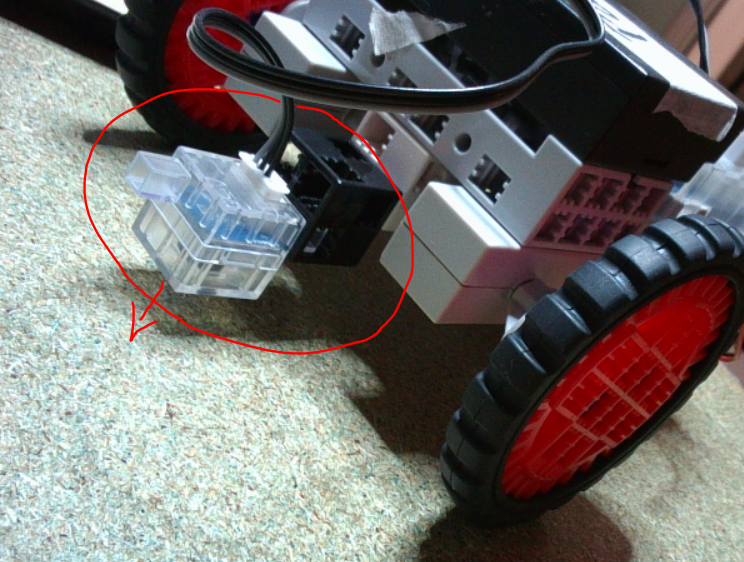
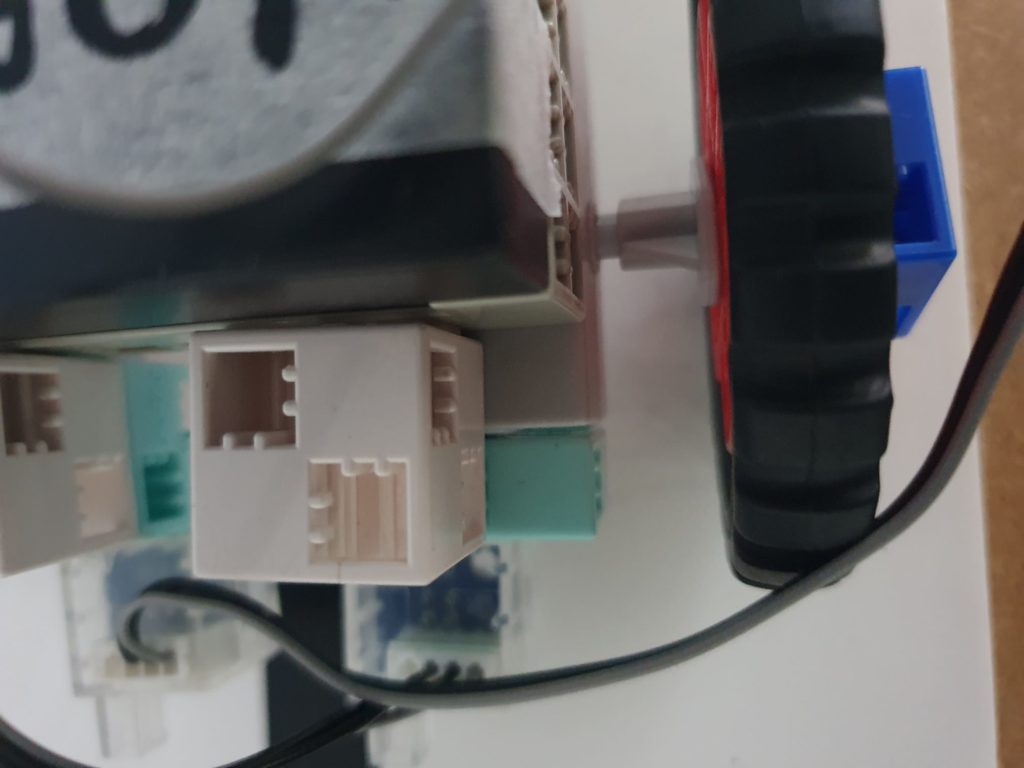
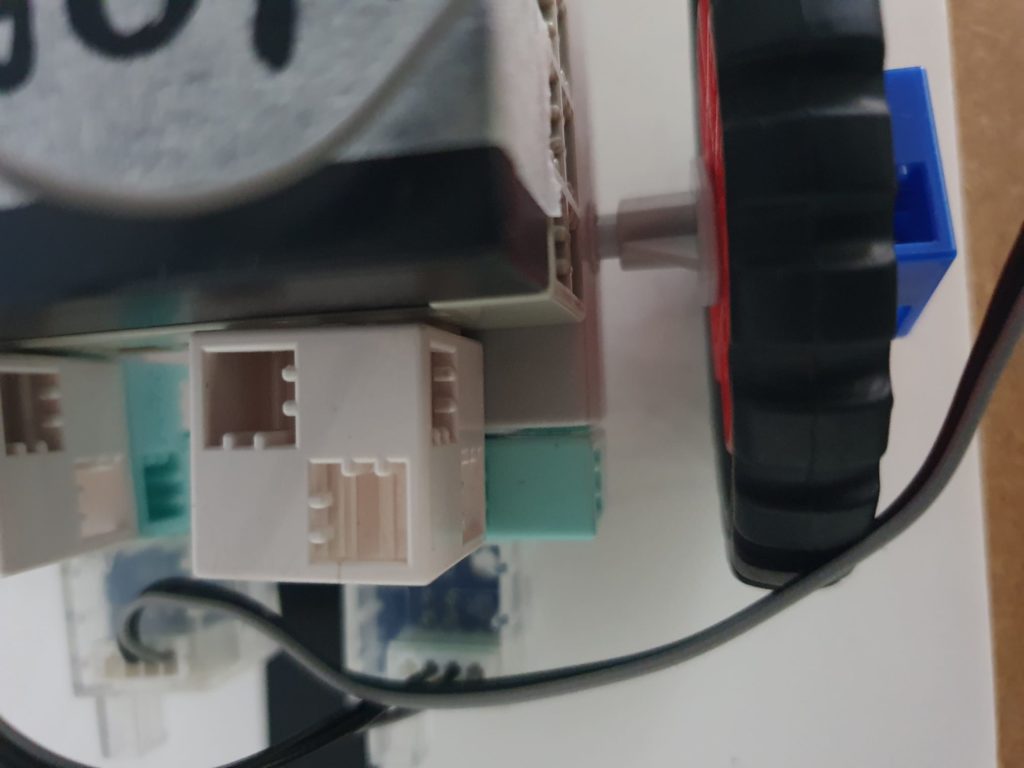
Pour la construction du robot, trois préconisations :
l’espace entre les deux photoréflecteurs doit être légèrement supérieur à la largeur de la ligne noire.
les photoreflecteurs doivent être le plus proche du sol
les photoréflecteurs doivent être devant mais proche des roues directrices.
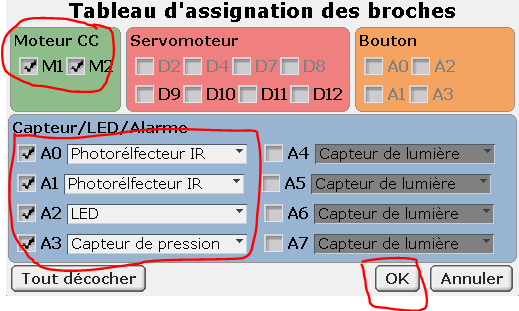
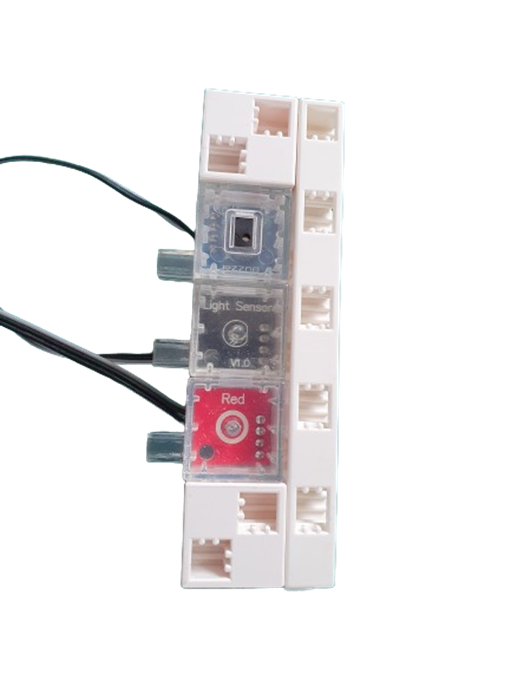
Utilise deux capteurs photo réflecteurs IR, un capteur de pression et une LED :
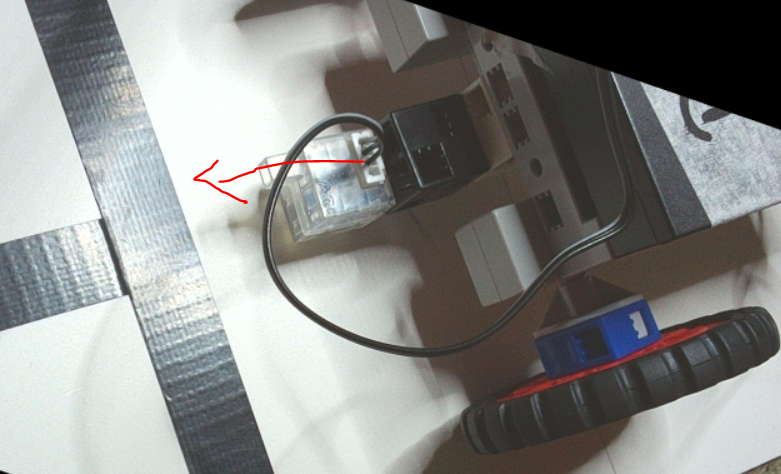
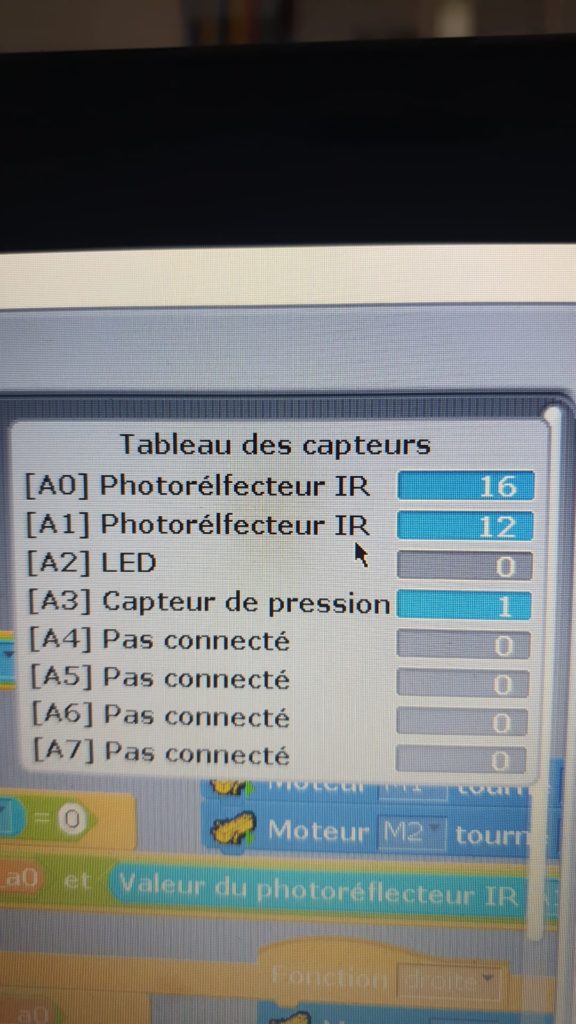
Active le mode test :
Pose ton robot et ses deux photo réflecteurs sur une ligne noire pour visualiser les valeurs retournées :
Tu peux constater les deux photo réflecteurs n’ont obligatoirement pas la même mesure de la valeur de la couleur de la ligne noire. Pour plus de justesse, utilise deux variables pour stocker la valeur de la ligne noire.
D’autre part, il semble plus pertinent de mesurer la ligne noire et d’utiliser cette valeur plutôt que le blanc. Tu peux constater également que la valeur retournée par les photoreflecteurs peut varier lors du déplacement du robot sur la ligne noire.
Utilise une variable « tolerance » afin de prendre en compte des variations dans les mesures de la ligne noire lors du parcours :
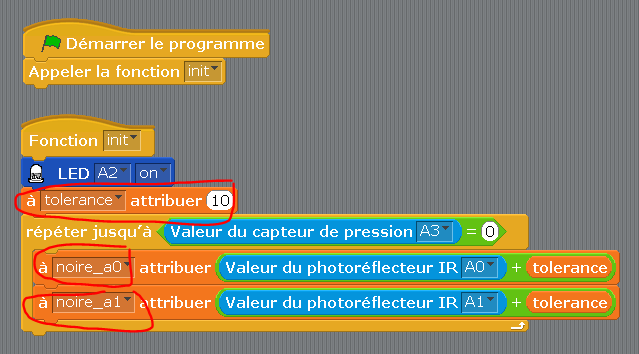
Donc avant le lancement du robot, réalise une prise des valeurs des photo réflecteurs sur la ligne noire.
Les valeurs retournées par les deux photo réflecteurs sont mémorisées dans deux variables, une variable pour chaque photo réflecteur. Afin de gérer les fluctuations des mesures du noir, attribue 10 à la variable tolérance.
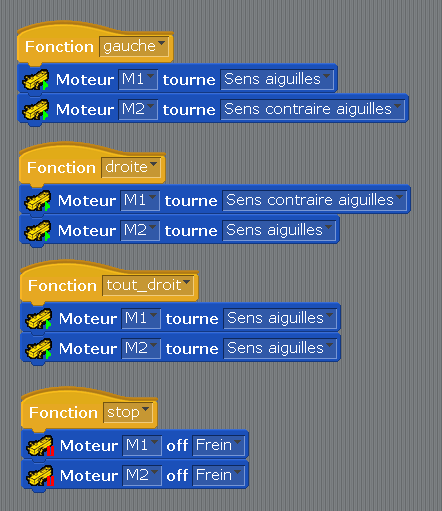
Puis programme tes fonctions pour que ton robot se déplace tout droit, à droite et à gauche puis puisse s’arrêter.
Pour passer les passages les plus difficiles, tu peux constater que la meilleure solution pour prendre des virages serrés est de faire tourner le robot sur lui même par une inversion des moteurs, un moteur vers l’avant, l’autre vers l’arrière.
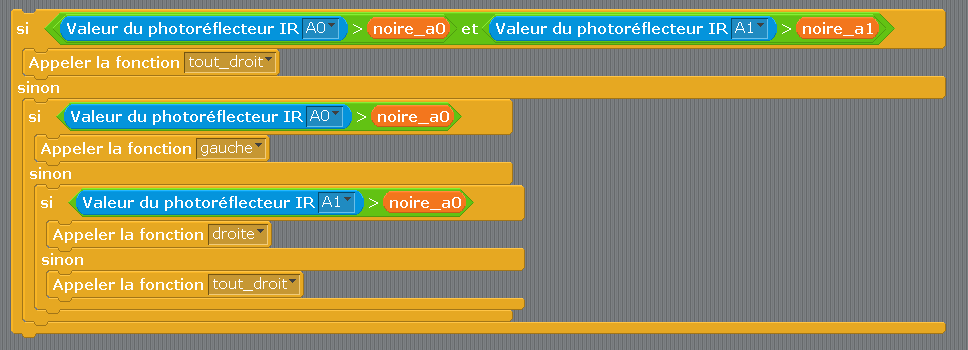
Programme pour que ton robot maintienne les deux photo réflecteurs de chaque coté de la ligne noire et ainsi suivre la ligne noire :
si les deux photo réflecteurs sont sur le blanc, le robot va tout droit,
si le photo réflecteur droit A0 est sur le blanc alors le robot doit aller vers la ligne noire en tournant à gauche,
si le photo réflecteur gauche A1 est sur le blanc alors le robot doit rejoindre la ligne noire en tournant à droite :
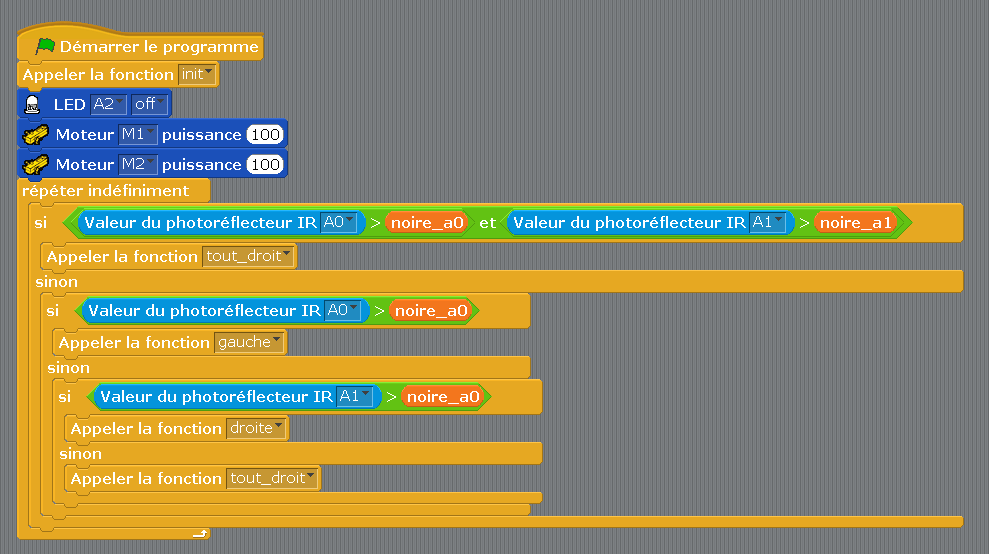
Puis rajoute au programme principal :
Essaye ton robot après un transfert :
Pose ton robot avec les deux photo réflecteurs sur la ligne noire pour la phase d’apprentissage de la couleur noire , puis appuie sur la capteur de pression. Ton robot suit la ligne noire même dans les courbes difficiles.
Vérifie le comportement de ton robot :
Les deux photo réflecteurs dans le blanc on avance tout droit.
Seul le photo réflecteur droit voit le blanc alors on tourne à gauche,
Seul le photo réflecteur gauche voit le blanc alors on tourne à droite,
Autrement le robot avance tout droit.
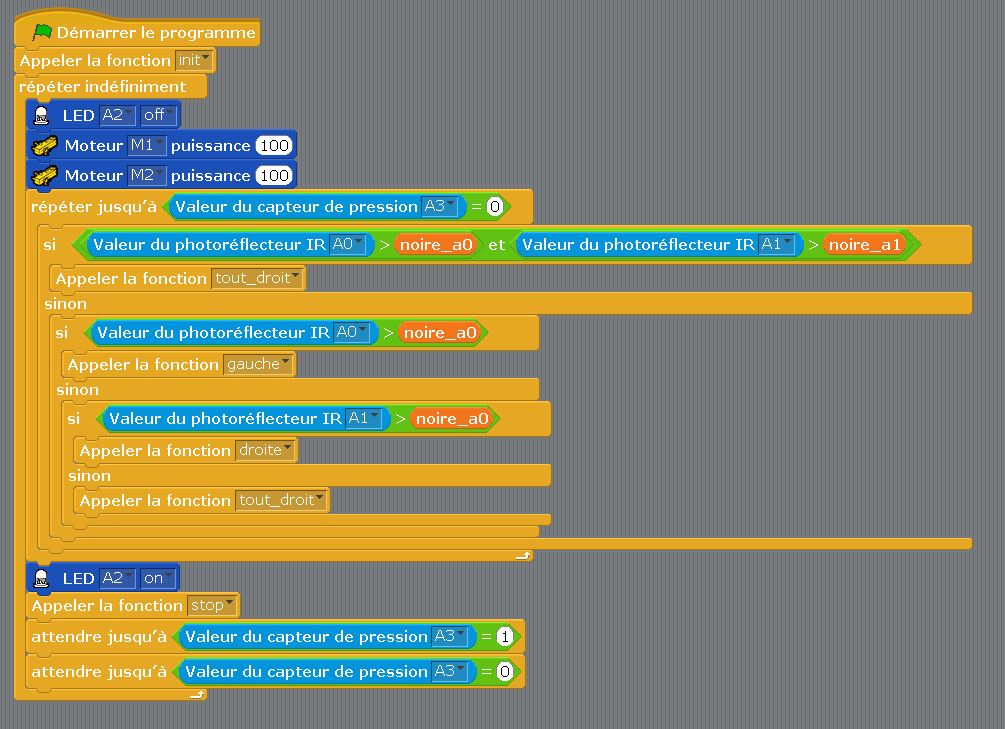
Modifie ton programme pour que ton robot s’arrête sur un nouvel appui sur le capteur de pression :
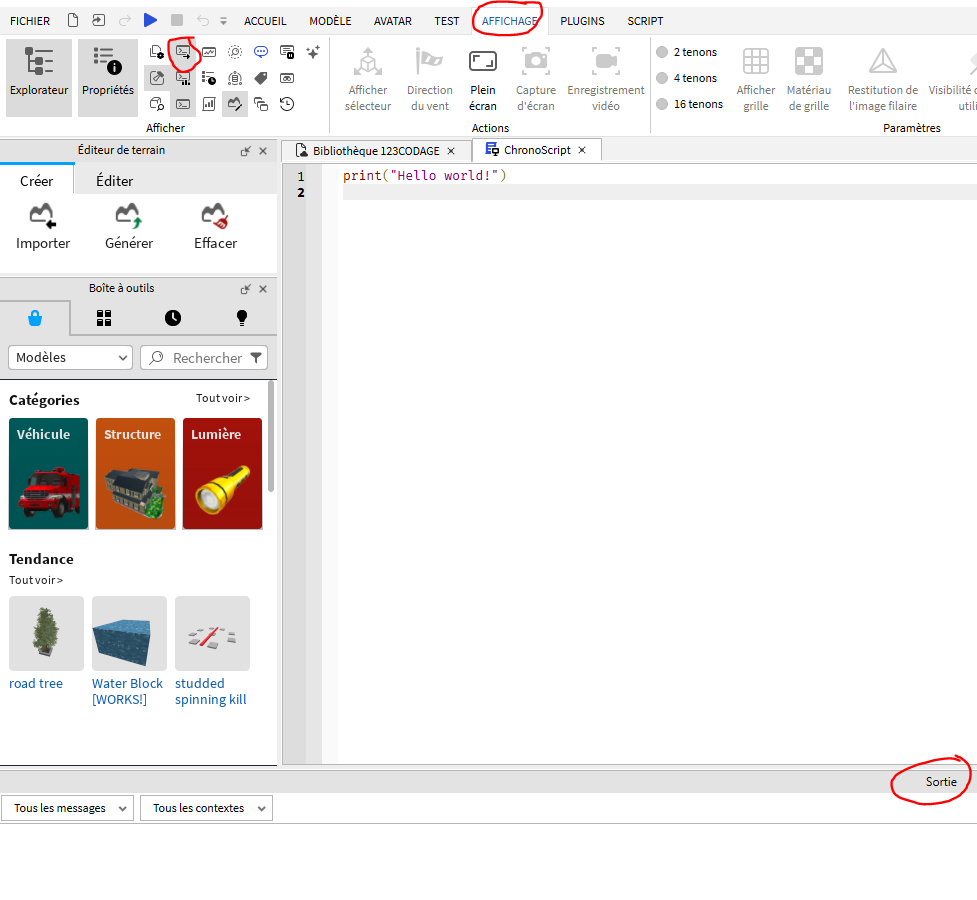
Utilise cette icone dans la barre des tâches dans le bas de ton écran pour lancer ROBLOX STUDIO :
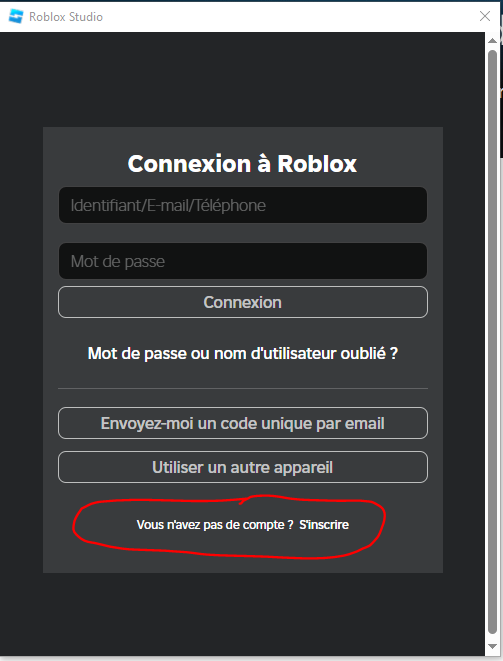
Si tu as déjà un compte ROBLOX tu peux saisir ton identifiant :
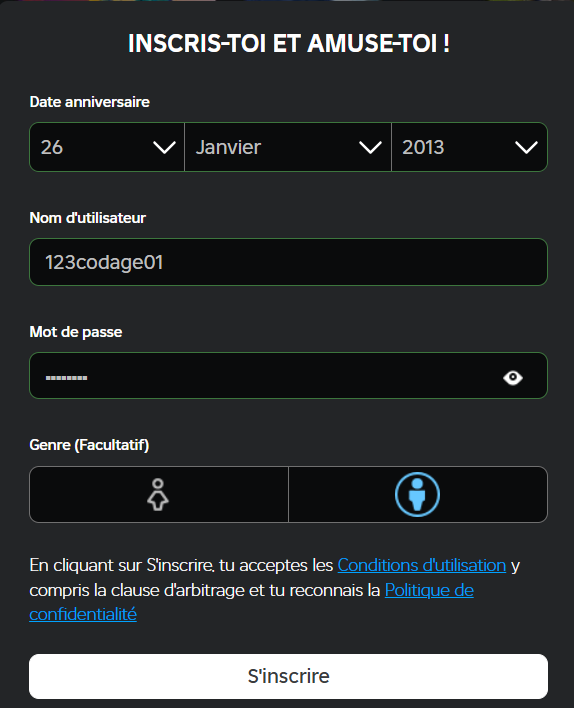
Si tu n’as pas de compte alors clic sur le lien Vous n’avez pas de compte ? S’inscrire :
Ouvrir un projet ROBLOX
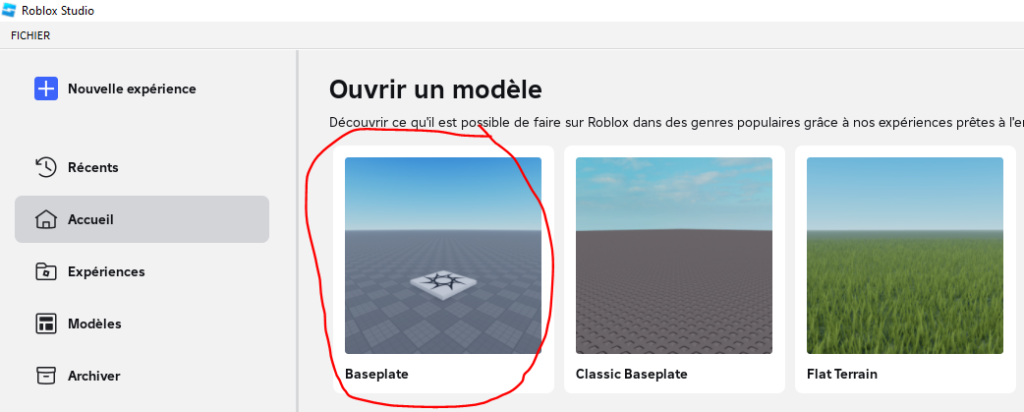
Dans ROBLOX STUDIO choisis d’ouvrir le modèle Baseplate :
Manipulations simples avec la souris.
Tourner la roulette de la souris :
Appuie sur la molette de la souris et fais glisser la souris :
Maintenant clic sur le bouton droit et fais glisser la souris :
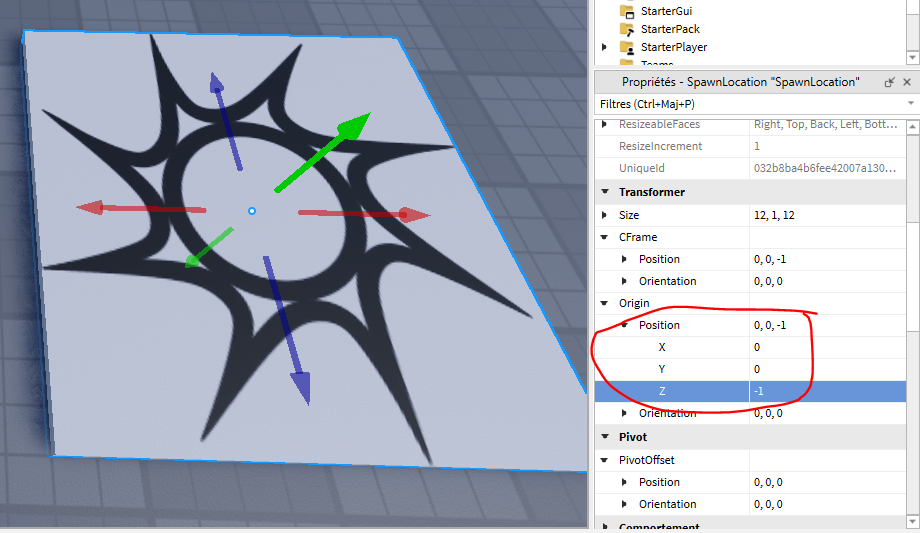
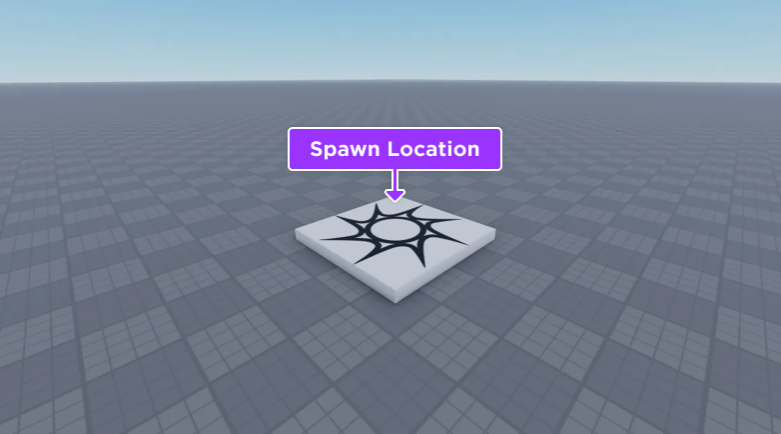
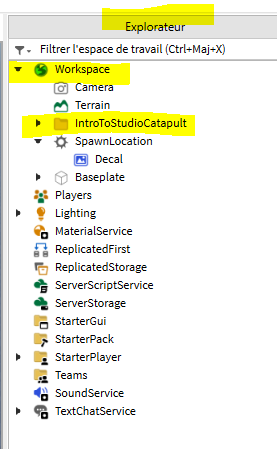
Clic sur l’objet sur la fenêtre le « SpawnLocation ». Cet objet matérialise le départ de ton joueur.
Avec les quatre outils suivants qui sont dans ta barre d’outils :
Tu peux :
Sélectionner
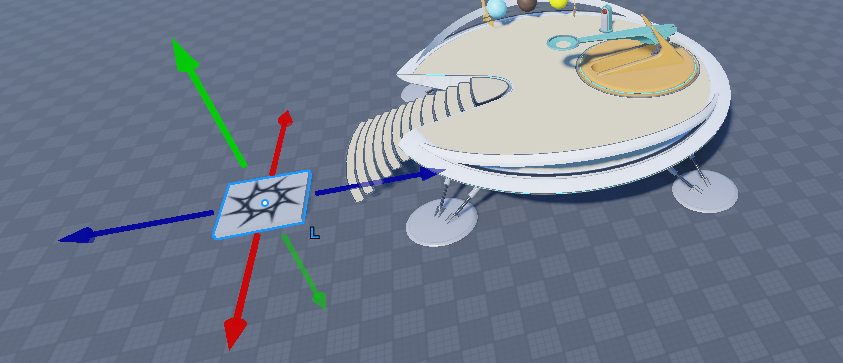
Déplacer
Modifier la taille
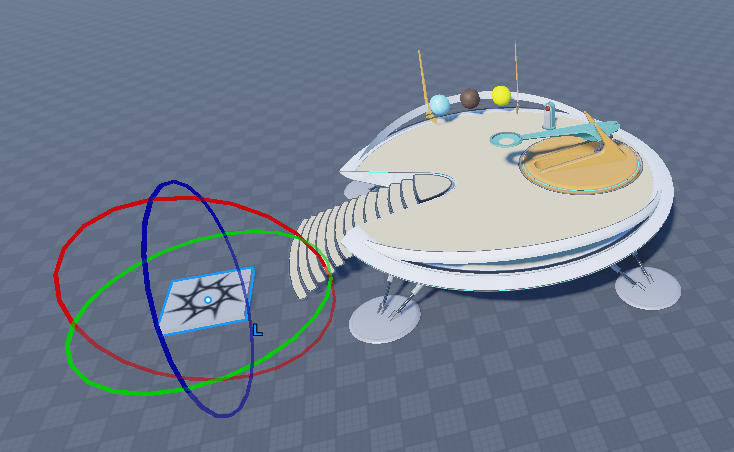
Effectuer une rotation
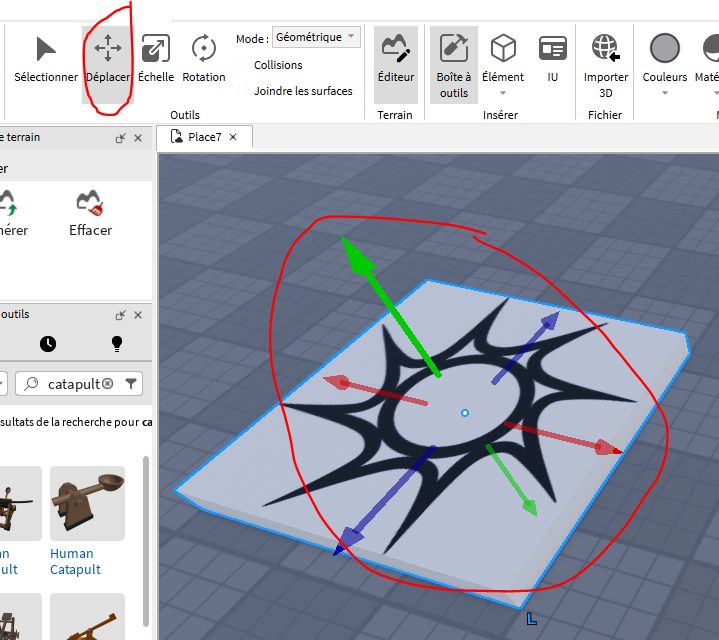
Essaye de déplacer l’objet :
Sur la partie droite de l’écran, tu retrouves les propriétés de l’objet dont sa position sur les trois axes x, y ,z :
Pour commencer à découvrir les concepts importants pour le développement sur Roblox: tu vas créer un jeu qui lance des projectiles sur des plates-formes flottantes.
Pour l’instant, tu as créé un projet avec le modèle Baseplate, qui comprend deux objets par défaut qui sont importants pour presque toutes les expériences sur la plateforme ROBLOX :
Emplacement d’apparition – Un objet SpawnLocation est l’endroit où les personnages des joueurs apparaissent dans l’espace 3D lorsqu’ils rejoignent une expérience, ainsi que l’endroit où ils réapparaissent lorsque leur santé atteint zéro.
Plaque de base – Une plaque de base est un sol avec une texture de grille 4×4.
Ce modèle est un excellent point de départ pour créer ta première expérience, car il fournit un monde neutre avec une technologie d’éclairage haute fidélité et un sol que tu peux utiliser pour positionner et orienter des objets 3D.
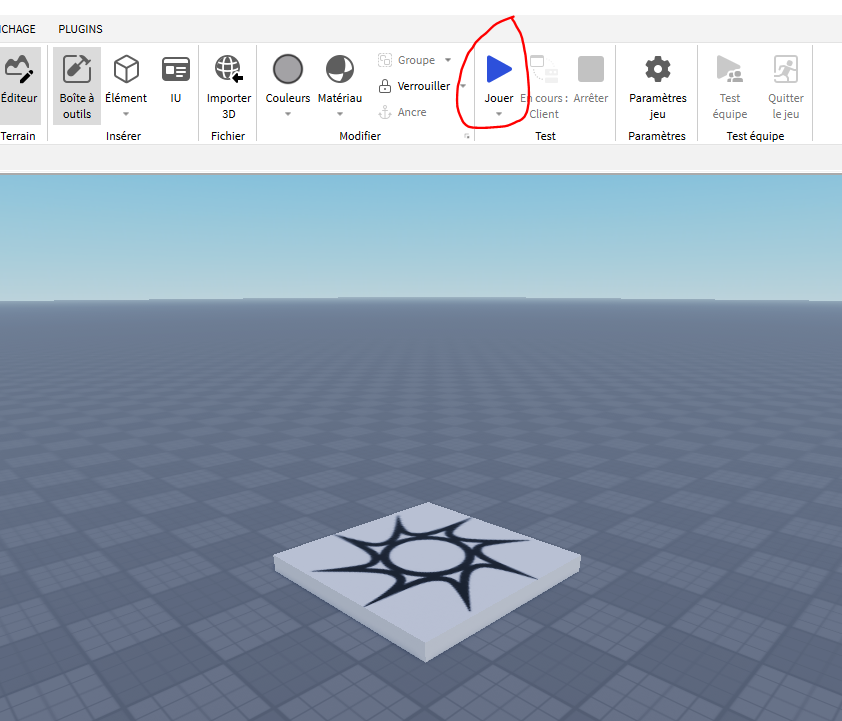
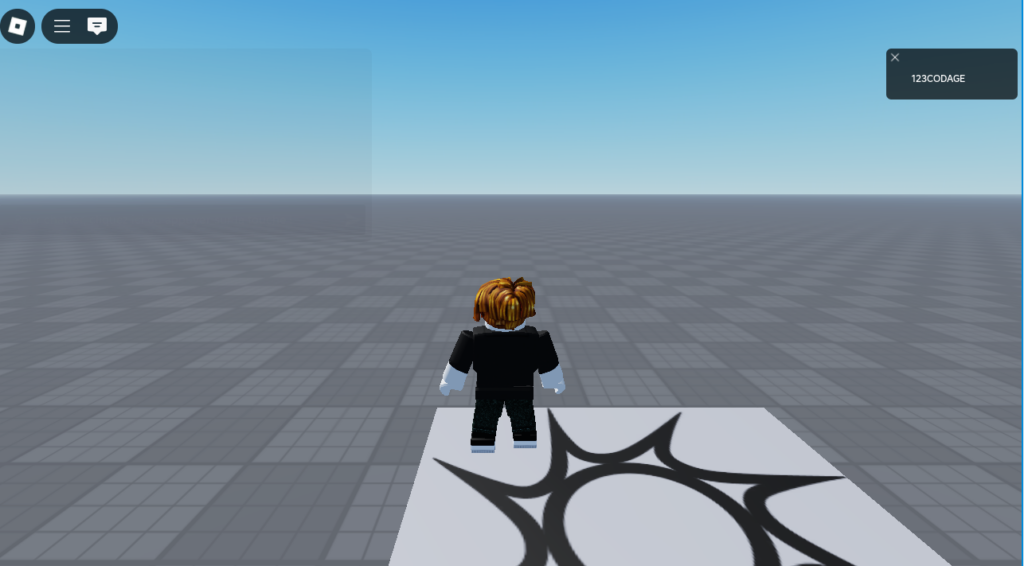
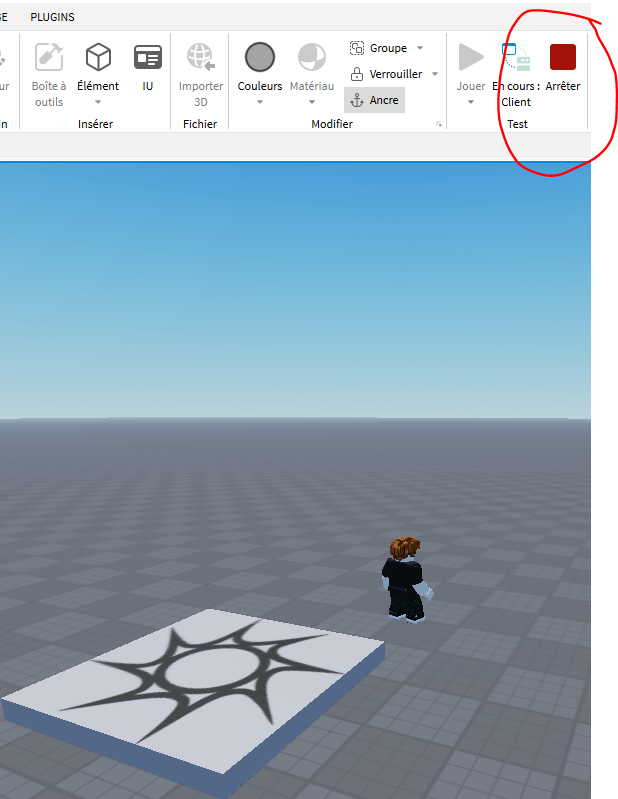
Tu peux le tester en utilisant l’outil Jouer :
Tu peux manipuler ton joueur avec les touches de clavier de déplacement, la barre d’espace pour sauter, ou lui donner une direction par un clic droit puis un glissé de la souris dans la direction souhaitée.
Manipule ton joueur puis arrête ton jeu :
Création d’un premier jeu
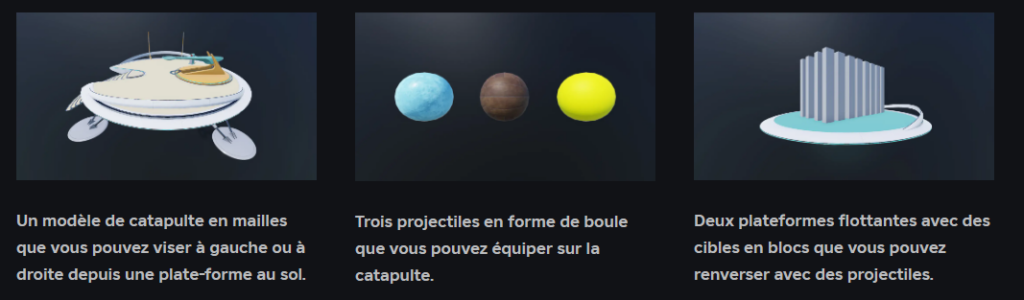
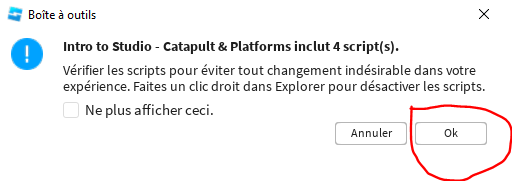
Pour te familiariser avec les objets 3D de ROBLOX, tu vas utiliser un pack d’éléments comprenant les objets 3D suivants qui créent le jeu de base pour ta première expérience :
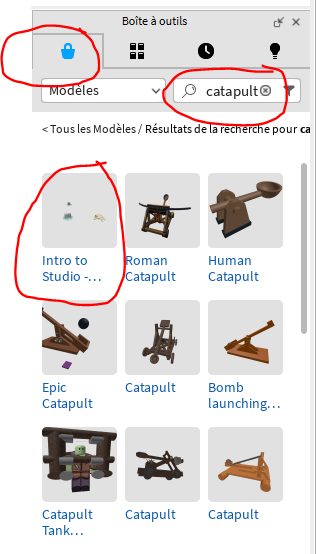
Dans la boîtes à outil dans la partie gauche de l’écran, tape dans la zone de recherche : catapult :
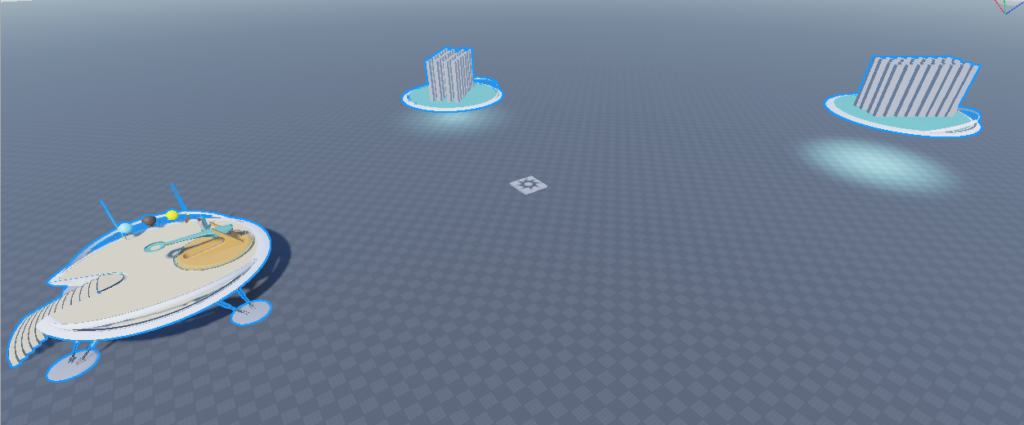
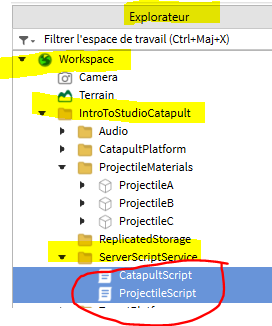
Tu peux constater la mise en place de trois objets dans ton jeu :
Une catapulte à gauche et deux cibles en haut et à droite.
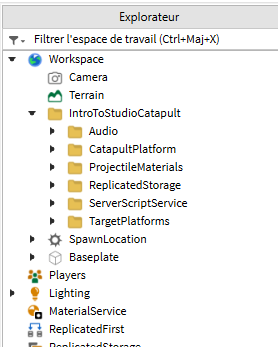
Sur la partie de droite dans Explorateur, tu retrouves la description des objets :
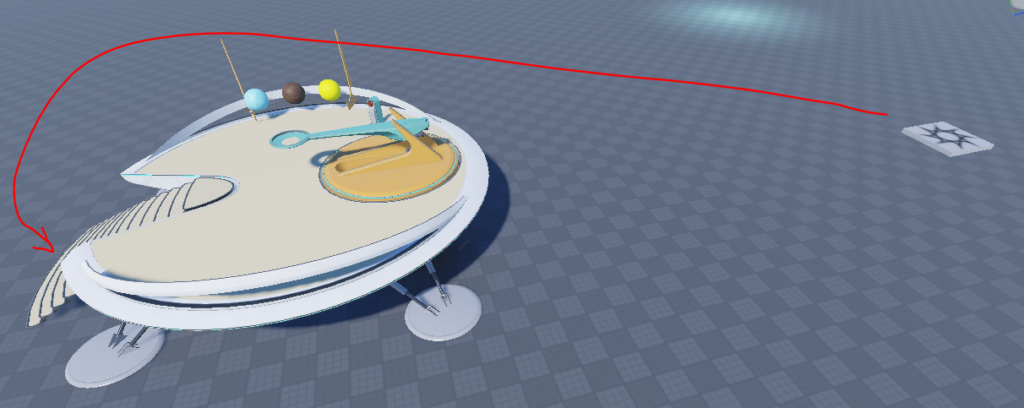
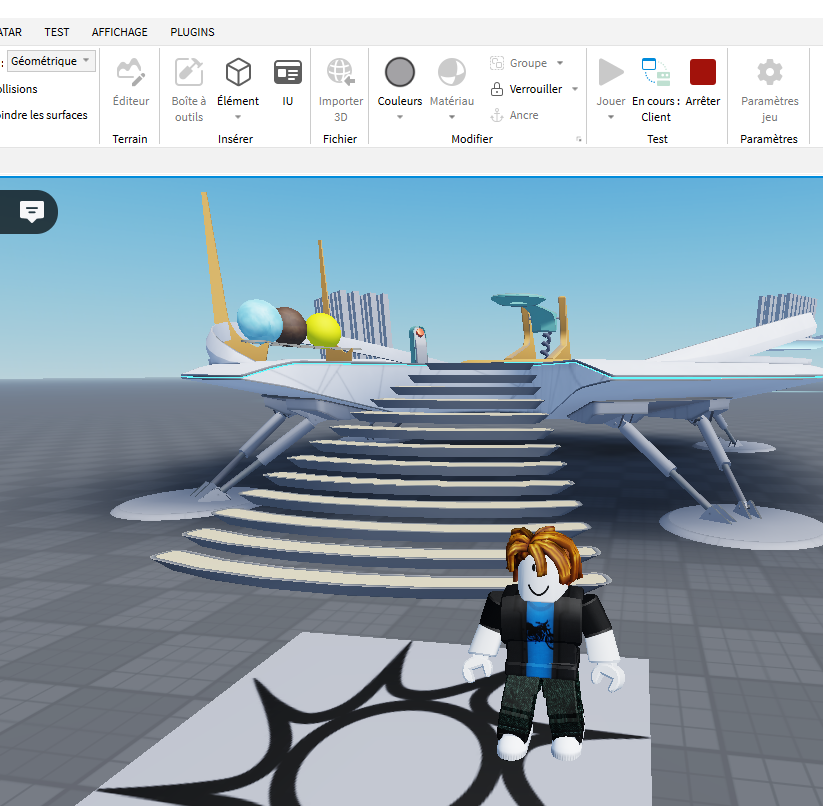
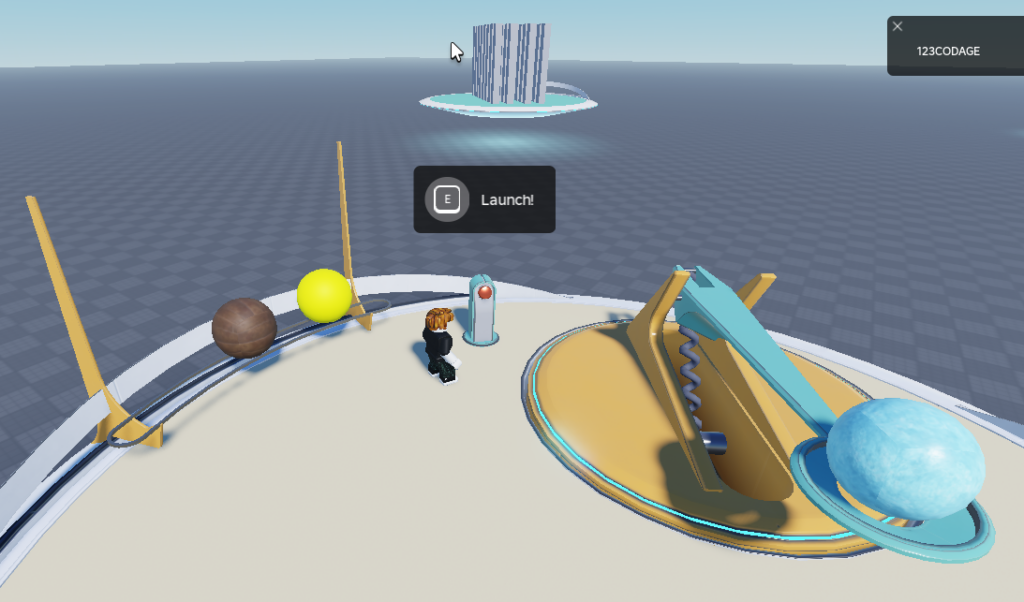
Pour jouer au jeu, il faut monter sur la catapulte, saisir les balles, viser les cibles puis tirer. Tu remarques que l’escalier pour atteindre la catapulte est à l’opposé du point de départ :
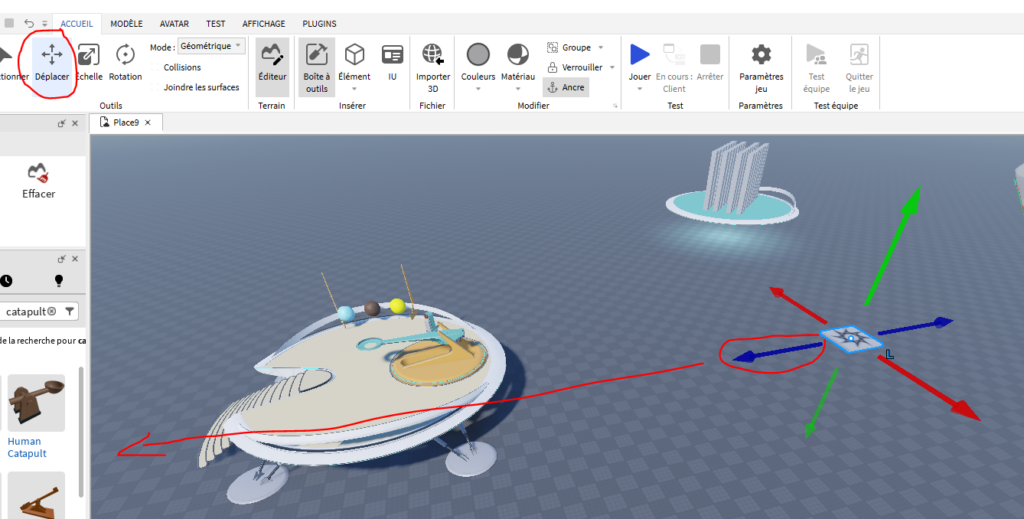
Tu vas utiliser l’outil déplacer pour mettre le point de départ devant l’escalier :
Lance ton jeu pour voir le résultat, tu peux constater que tu es devant l’escalier mais tu lui tournes le dos :
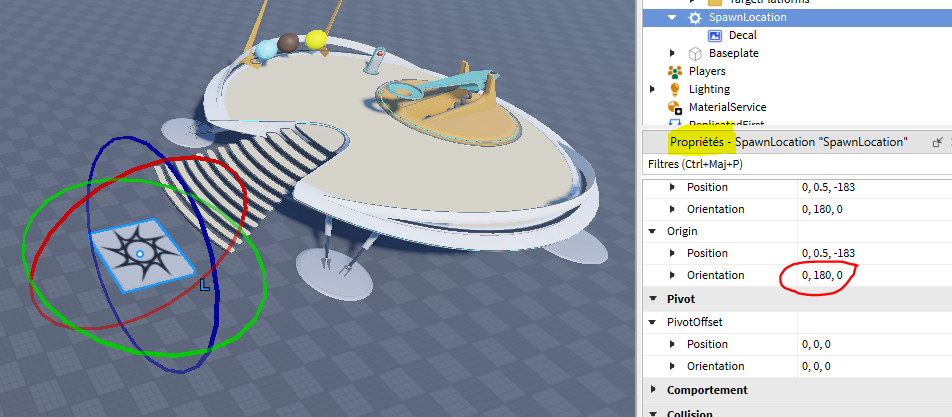
Arrête ton jeu et viens orienter ton joueur face à l’escalier par l’outil Rotation :
Utilise le cercle en vert pour orienter ton joueur face à l’escalier (180°). Dans les propriétés du SpawnLocation, tu retrouves la rotation de 180° :
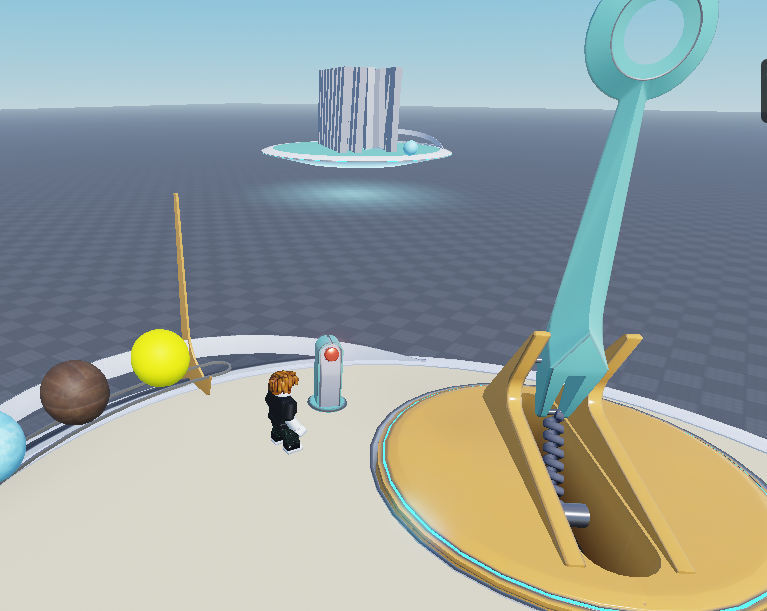
Monte l’escalier :
Avec le clic gauche de la souris, tu peux diriger la catapulte :
Vas vers les boules, tu peux en appuyant sur la touche E placer les boules dans la catapulte. Mais pour l’instant ce mécanisme ne fonctionne pas :
Tu peux également déclencher par E le lancement mais pour l’instant le mécanisme ne fonctionne pas :
Arrête ton jeu pour le modifier pour permettre son fonctionnement :
Pour l’instant tu as interagi qu’avec des objets du service Workspace de ton modèle de données.
Il est important de garder à l’esprit l’emplacement d’exécution des scripts, sinon vos objets risquent de ne pas se comporter comme vous le souhaitez.
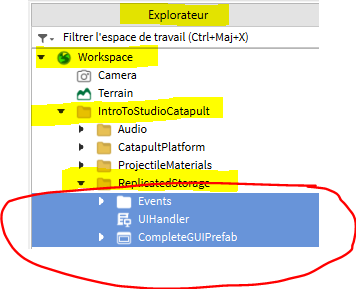
Pour garantir le fonctionnement de la catapulte, tu vas déplacer les objets des dossiers ReplicatedStorage et ServerScriptService dans leurs services de conteneur respectifs de ROBLOX.
ReplicatedStorage contient des objets disponibles à la fois pour le serveur et les différents joueurs connectés, notamment pour suivre le nombre de projectiles lancés par un joueur avant d’afficher l’interface utilisateur.
ServerScriptService contient des ressources liées aux scripts qui sont uniquement destinées à être utilisées par le serveur, pour la logique du jeu : qui positionne les projectiles sur la catapulte, lance des projectiles dans une direction particulière et réinitialise la catapulte à sa position de départ.
Sélectionne tous les objets sous introToStudioCatapult / RelicatedStorage :
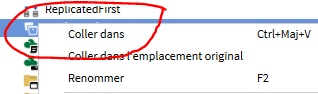
Puis par un clic droit demander à couper :
Puis dans Explorateur sélectionne le répertoire ReplicatedStorage:
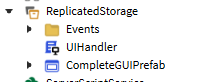
Puis colle les éléments coupés précédemment :
Tu obtiens ce résultat :
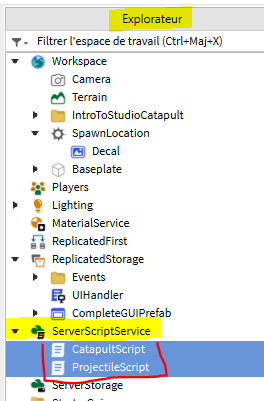
Réalise la même opération avec IntroToStudioCatapult ServerScriptService .
Couper :
Coller :
Lance ton jeu et maintenant tu dois pouvoir lancer les boulets :
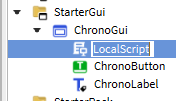
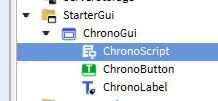
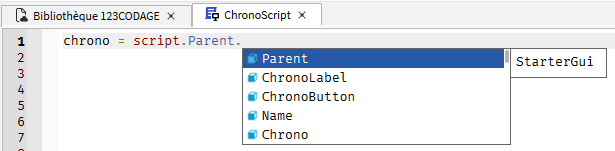
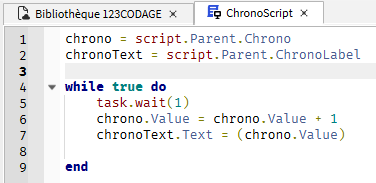
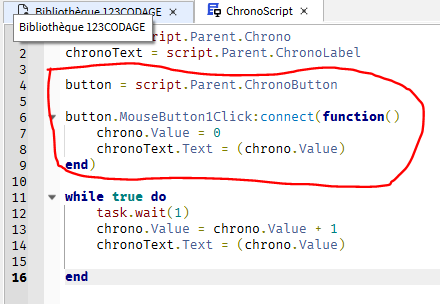
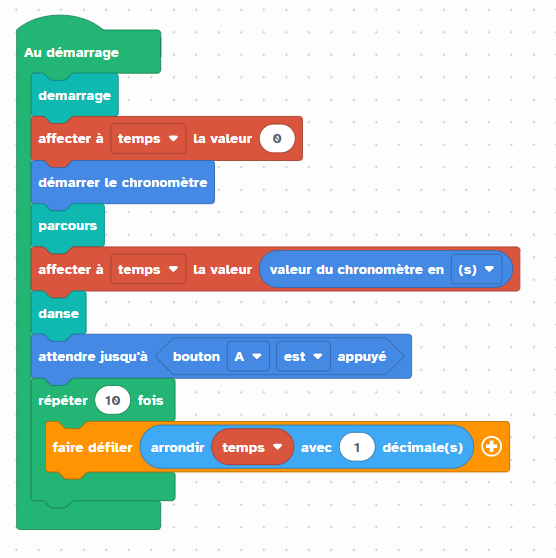
Ton projet doit ressembler à ce programme pour mesurer le temps de ton parcours et l’afficher sur la micro:bit :
Le chronomètre avec la variable « temps » mémorisent le temps de ton parcours. En fin de parcours; avec le bouton A de la micro:bit tu peurras afficher le résultat :
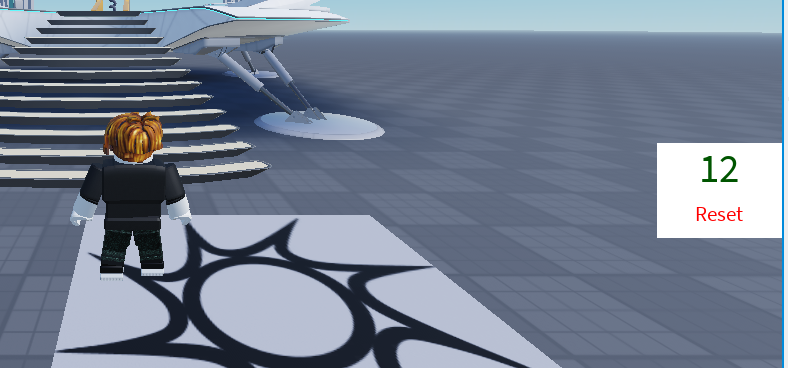
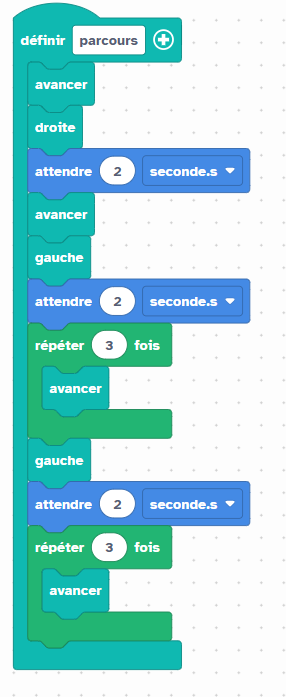
Voila un exemple du parcours :
Après chaque virage, positionne un « attendre » pour te donner la possibilité de repositionner ton robot à la main lors du parcours. Si tu peux éviter cette possibilité tu gagneras du temps.
Au démarrage de ton robot, anime ton robot pour pendant un certain avant son lancement :
A la fin du parcours fait danser ton robot :
Bonne chance le meilleur temps pour l’instant 9 secondes !!!!!!!
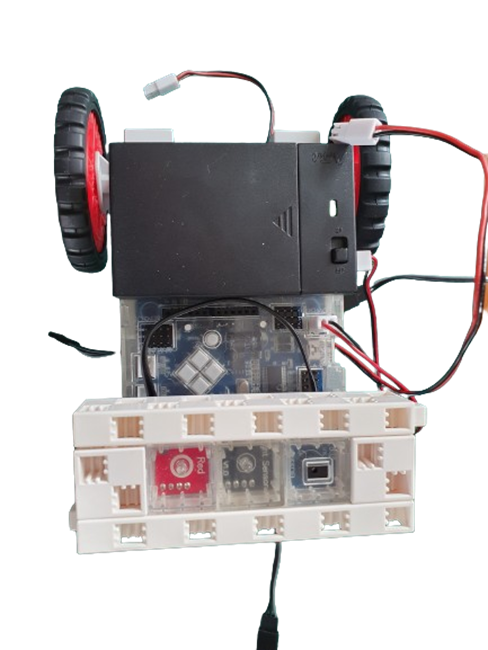
Apprendre à construire un robot qui obéit au doigt.
Liste des pièces avant la construction
Carte ARDUINO
1
Batterie
1
Cable USB
1
Moteur CC plus les deux moyeux
2
Capteur de lumière
1
Bloc blanc ou de différentes couleurs
6
Demi-cube
2
Demi-cube
4
Disque
1
LED rouge
1
Buzzer
1
Roue
2
barre
2
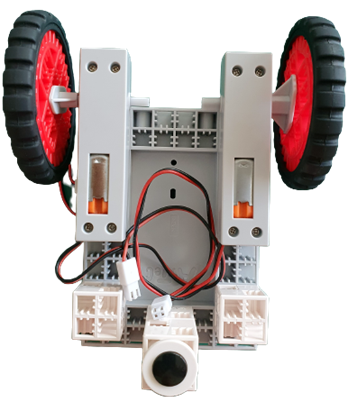
Construction de ton robot :
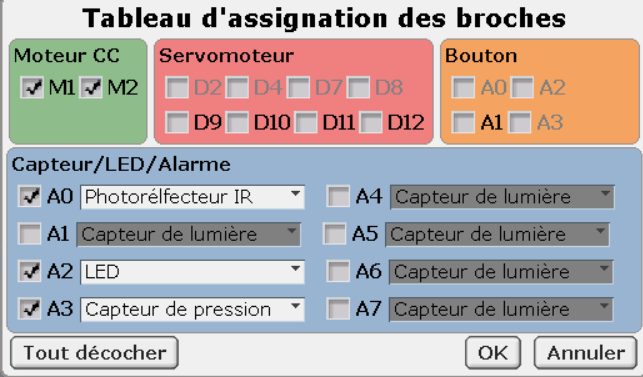
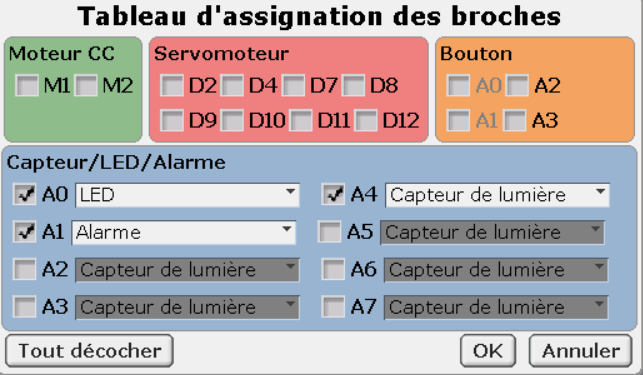
Le tableau des assignations
Clique sur le menu Edition en haut de l’écran et choisis Paramètres des ports Clique ensuite sur le bouton Tout décocher . Puis indique tous les éléments que tu as rajoutés sur ton robot.
Réveiller ton robot
A la mise sous tension de ton robot, celui-ci est dans un état « endormi ». En mettant le doigt sur le capteur de lumière, le robot se réveille et allume une LED.
Ta mission
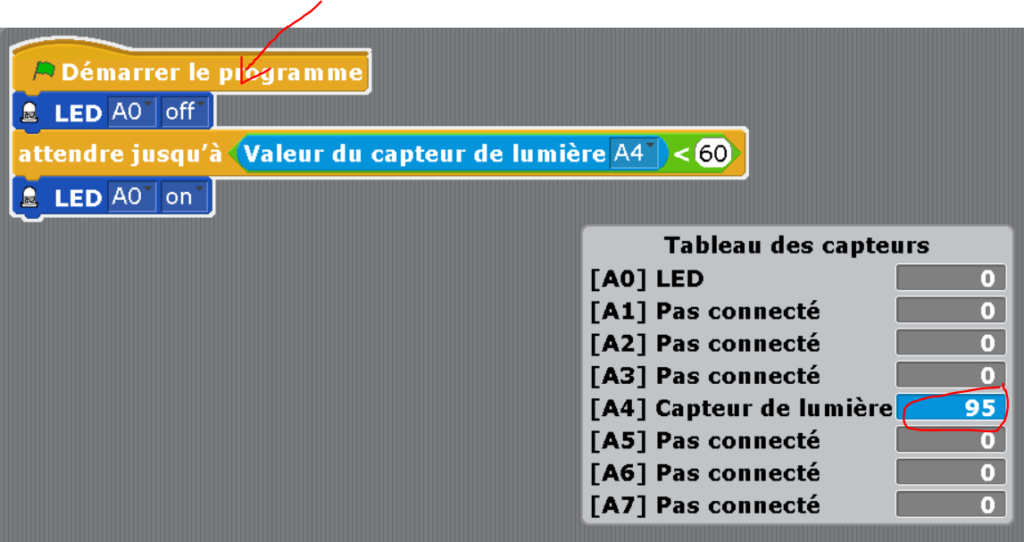
Ton robot se réveille dès qu’il détecte la présence de ton doigt sur le capteur de lumière puis allume une LED. Tu dois réaliser le programme suivant après « Démarrer le programme » :
Eteindre la LED 0
Détecter la présence de ton doigt sur le capteur de lumière
Allumer la LED 0
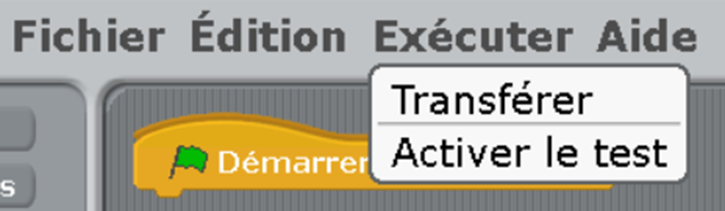
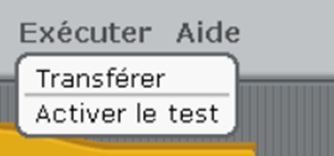
Dès que tu as écrit ton programme, clique sur le menu Exécuter en haut de l’écran et choisis Transférer.
Une solution
Teste ton code en activant le mode test :
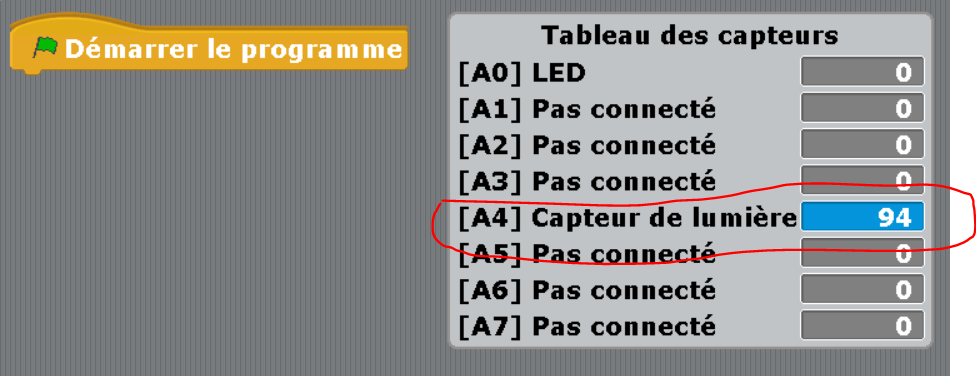
Visualise que ton capteur de lumière fonctionne correctement en posant ton doigt sur le capteur de lumière et vérifie la valeur sur le tableau des capteurs.
Vérifie la valeur du capteur de lumière sans ton doigt sur ce dernier :
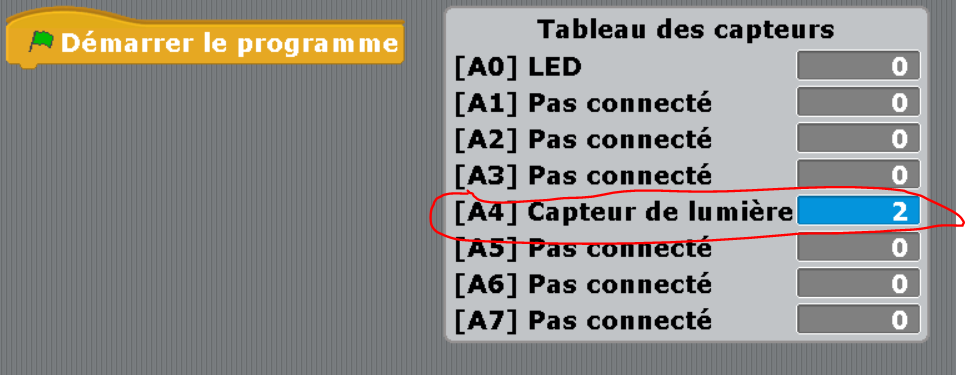
Puis vérifie la valeur du capteur de lumière avec ton doigt sur ce dernier :
Exécute ce programme par un clic sur Démarrer le programme :
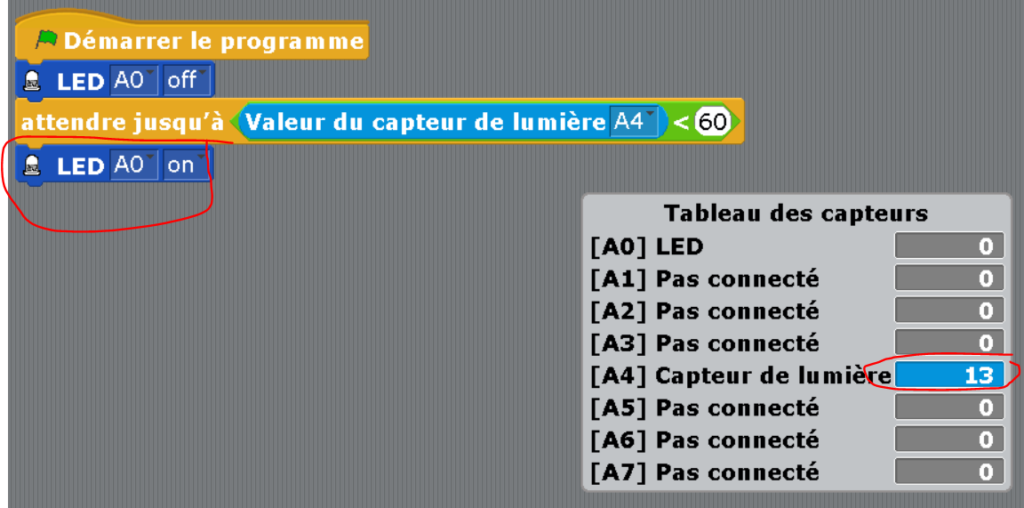
Pose ton doigt sur le capteur de lumière, la LED doit s’allumer :
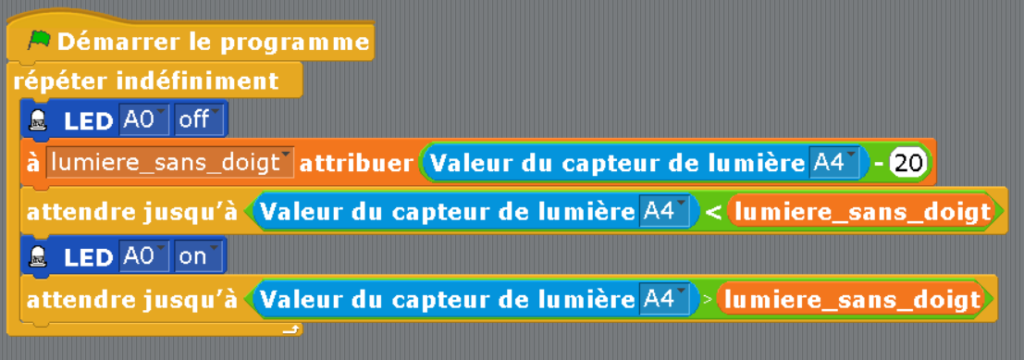
Pour que ton programme fonctionne dans toutes les situations de lumière ambiante, tu vas créer une variable pour mémoriser la valeur de la lumière ambiante :
Mémorise ainsi la valeur de la lumière ambiante dans cette variable :
Ainsi tu peux détecter la présence du doigt sur le capteur avec une tolérance de variance de la lumière de 20 :
Puis attendre que le doigt ne soit plus présent :
Dès que tu as écrit ton programme, clique sur le menu Exécuter en haut de l’écran et choisis Transférer.
La LED 0 s’allume dès que tu mets ton doigt sur le capteur puis elle s’éteint dès que tu enlèves ton doigt.
Ta mission
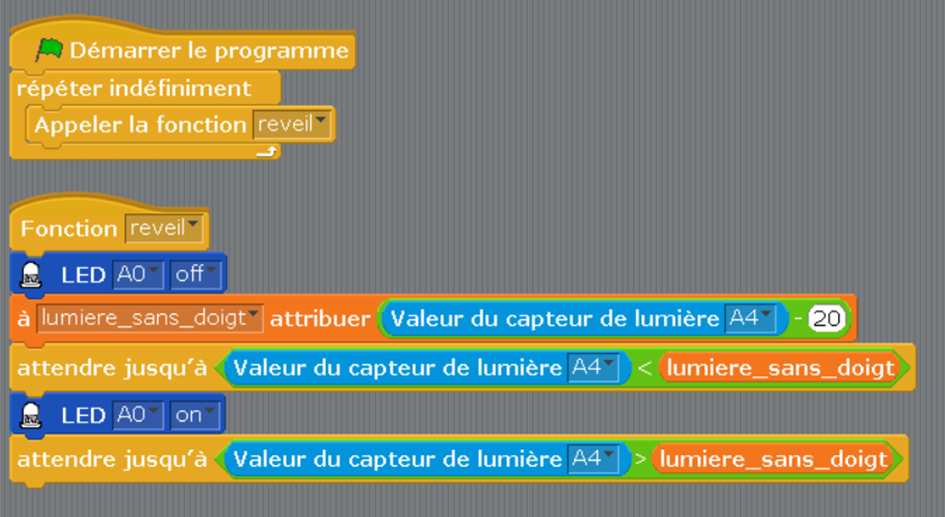
Tu vas utiliser cet alghorithme comme fonction pour le réveil de ton robot.
L’idée principale est d’attendre que l’utilisateur pose son doigt sur le capteur de lumière, puis d’allumer la LED 0 pour indiquer que le robot est prêt à être utilisé.
Une solution
Dès que tu as écrit ton programme, clique sur le menu Exécuter en haut de l’écran et choisis Transférer.
Passer un ordre à ton robot
Ta mission
Maintenant que tu as la possibilité de réveiller ton robot, tu vas lui donner des ordres par l’appui sur le capteur de lumière. Deux appuis et ton robot se rendort.
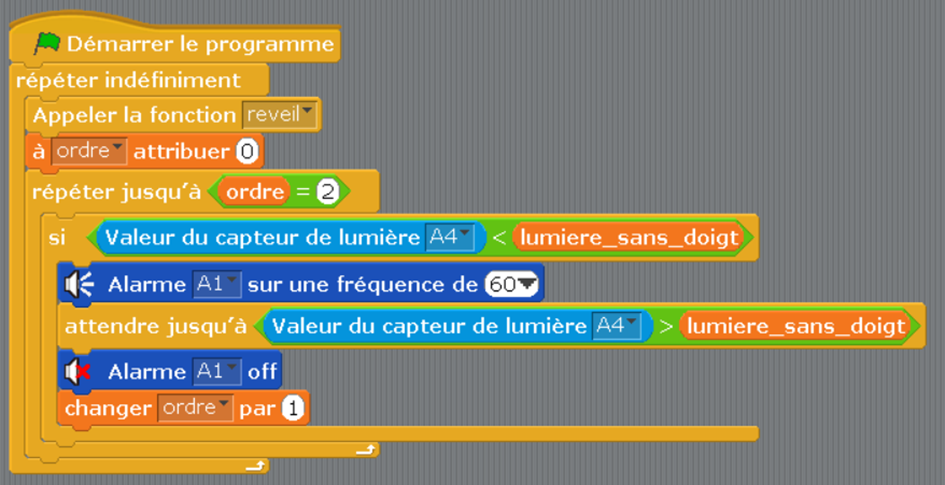
Une solution
Tu dois créer une variable pour mémoriser l’ordre donné par l’utilisateur de ton robot :
Comme tu l’as expérimenté précédemment, détecte l’appui sur le capteur de lumiére puis son relachement afin de mémoriser l’ordre.
Active le mode test pour tester ton programme :
Vérifie que la variable « ordre » est bien cochée pour qu’elle soit visible :
Dans la partie droite en haut de l’écran, visualise les valeurs de « ordre » en fonction de la progression de ton programme.
Au lancement de ton programme « ordre » est égal à la valeur zéro.
Réveille ton robot en posant ton doigt sur le capteur de lumière.
Puis pose à nouveau ton doigt sur le capteur, tant que ton doigt est sur le capteur tu entends le buzzer, dès que tu relaches ton doigt du capteur, la variable « ordre » s’incémente de la valeur 1.
Si tu appuies de nouveau ordre s’incrémente à 2 et le robot s’éteint :
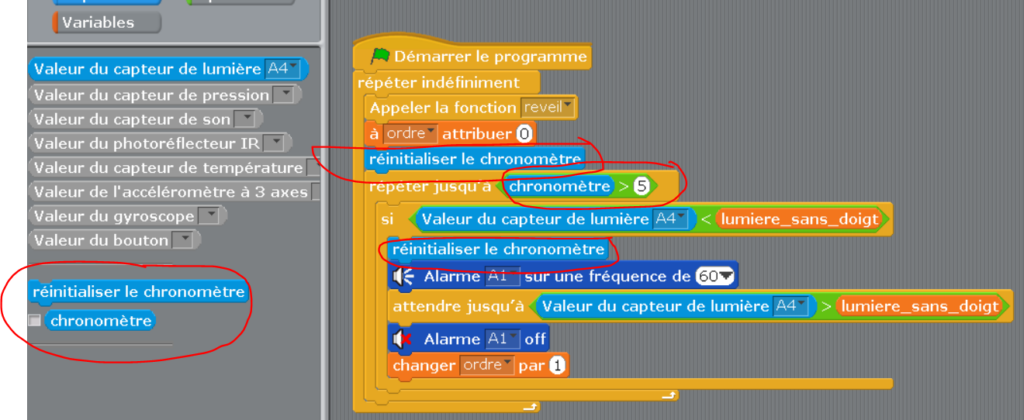
Endormir ton robot
Ton robot doit s’endormir si tu ne passes plus d’ordre au bout d’un certain temps. Pour cela tu utilises le chronomètre pour mesurer le temps pendant lequel aucun ordre n’est donné :
Dès que tu as écrit ton programme, clique sur le menu Exécuter en haut de l’écran et choisis Transférer.
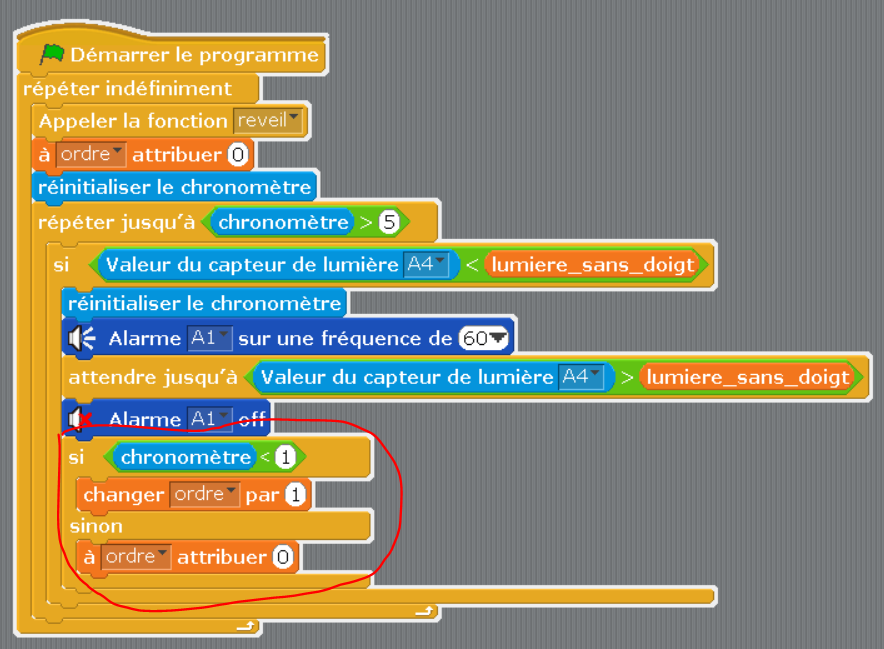
Comment valider un ordre
Ta mission
Pour valider l’ordre donné, tu utilises un appui plus long, par exemple plus d’une seconde :
Dès que tu as écrit ton programme, clique sur le menu Exécuter en haut de l’écran et choisis Transférer.
Faire bouger ton robot au doigt
Ta mission
Maintenant, tu peux faire bouger ton robot en lui donnant des ordres par des appuis successifs sur le capteur de lumière.
En appuyant plusieurs fois, tu peux donner des ordres à ton robot pour qu’il se déplace :
En avant (1 appui court puis un appui long)
En arrière (2 appuis courts successifs puis un appui long)
À droite (3 appuis courts successifs puis un appui long)
À gauche (4 appuis courts successifs puis un appui long)
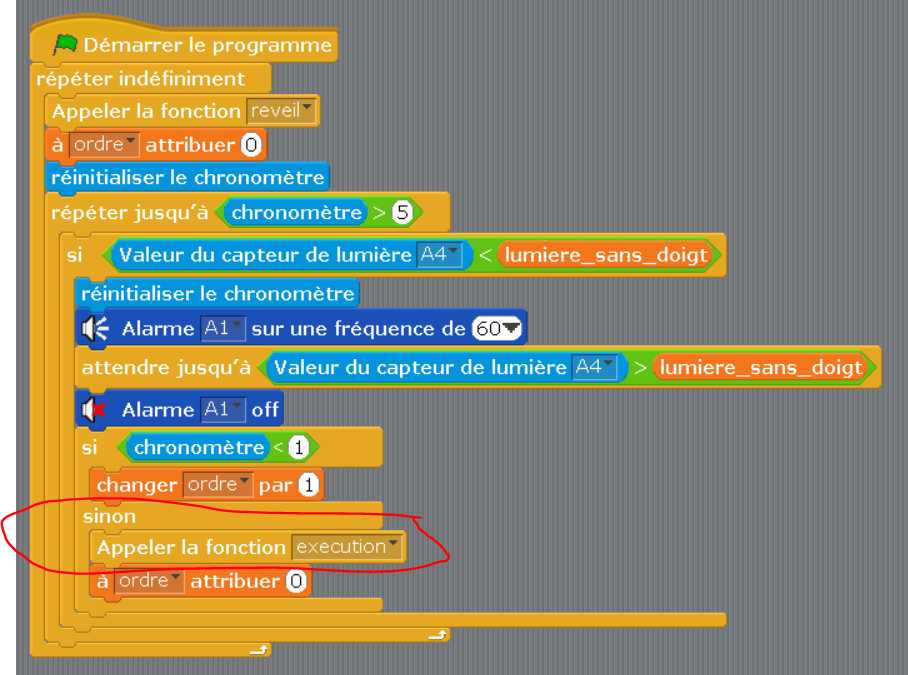
Une solution
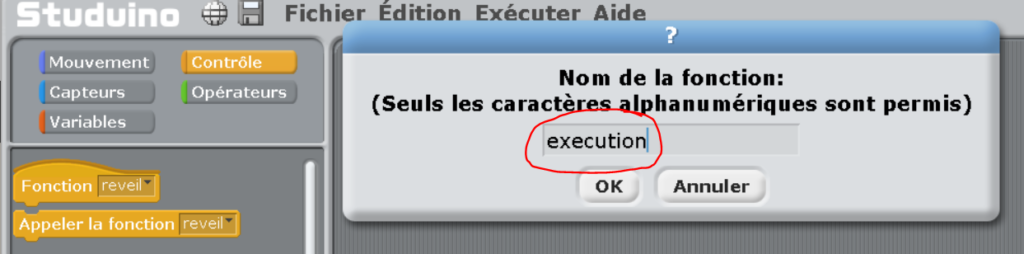
Crée une fonction « execution » pour déclencher les mouvements du robot en fonction de la valeur dans ordre :
faire avancer
faire tourner à droite
faire tourner à gauche
et le faire reculer
A toi d’écrire les fonctions avancer, reculer, droite, gauche.
Dès que tu as écrit ton programme, clique sur le menu Exécuter en haut de l’écran et choisis Transférer.
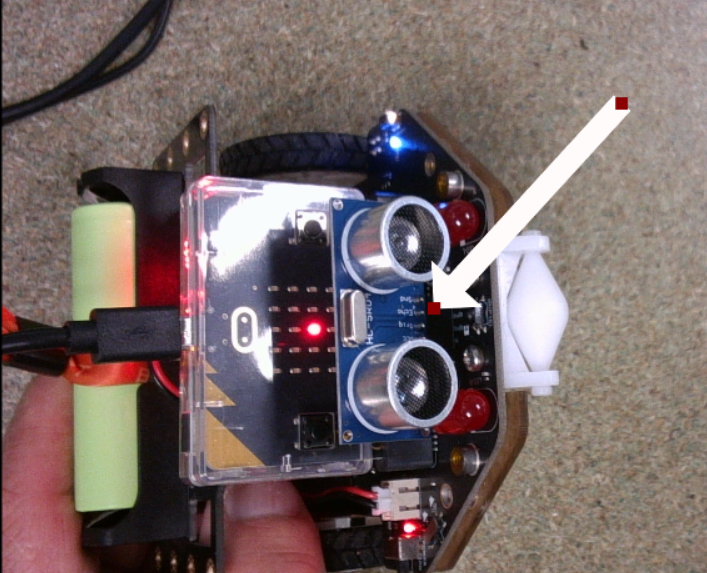
Ton maqueen doit disposer de ce dispositif, deux gros yeux :
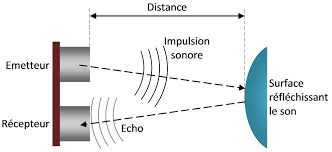
Ce capteur à ultrasons, un sonar, utilise l’écho pour déterminer la distance à laquelle se trouve un objet.
L’émetteur permet d’envoyer une impulsion sonore de l’ordre de 40 kHz. Cette impulsion est réfléchie sur un obstacle puis est détectée lorsqu’elle revient au récepteur sous la forme d’un écho.
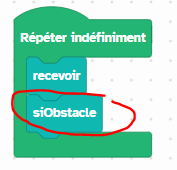
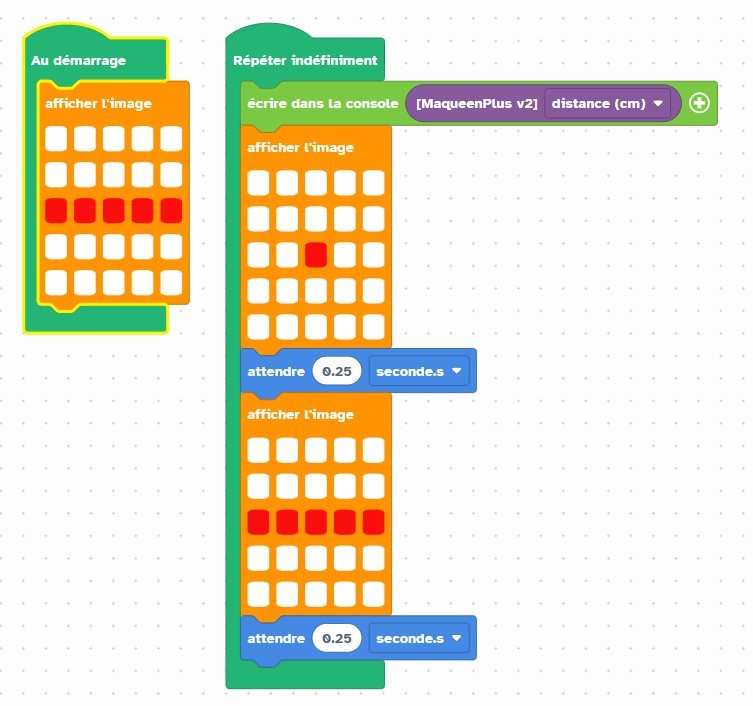
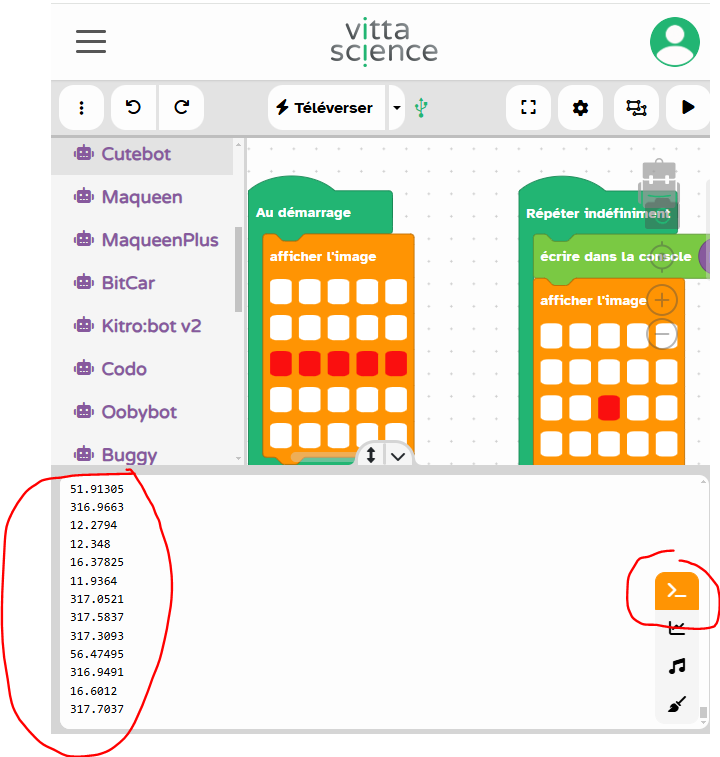
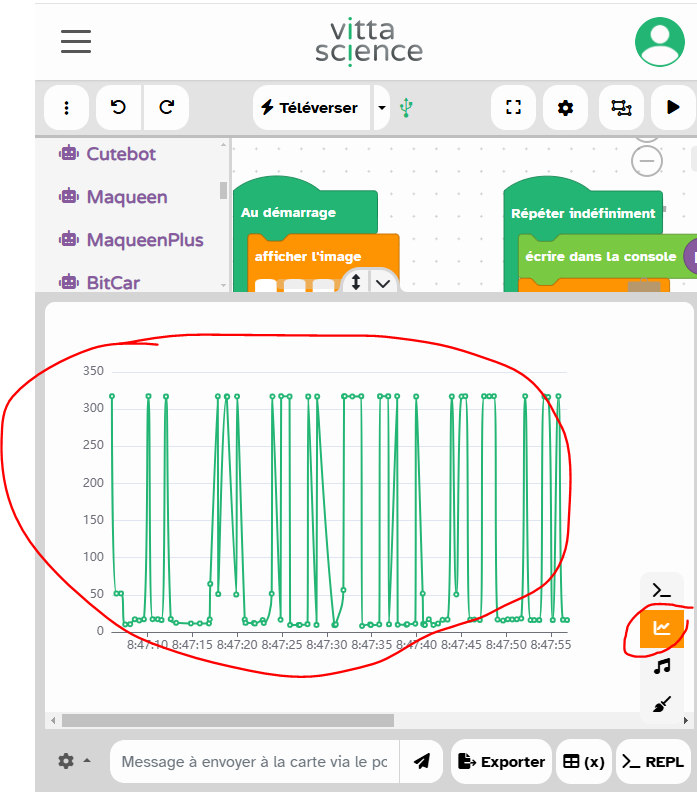
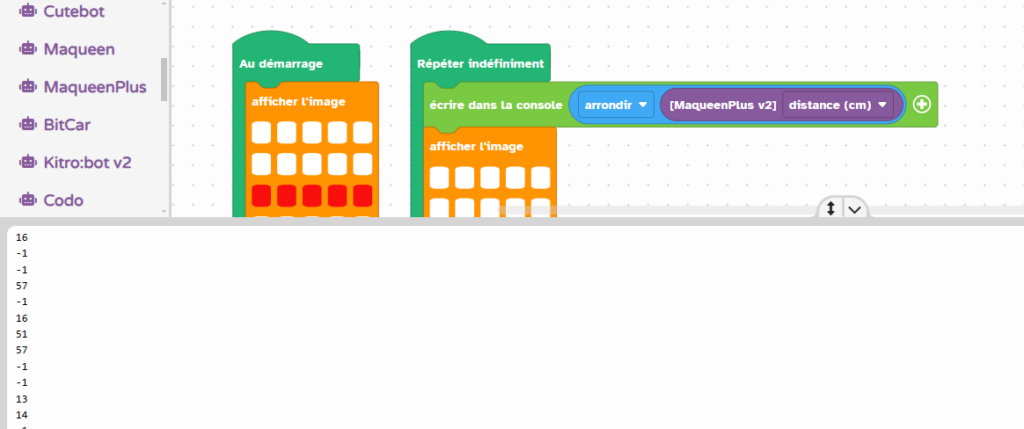
Programme pour visualiser dans la console les valeurs retournées par le dispositif de sonar pour détecter les obstacles :
Tu peux visualiser soit les valeurs avec la console ou sous forme graphique :
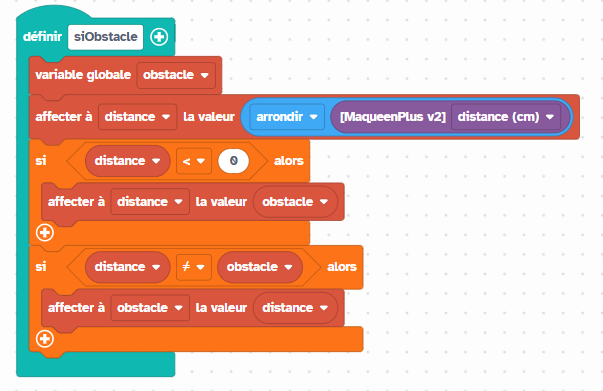
Arrondie la valeur de la distance pour obtenir une valeur entière :
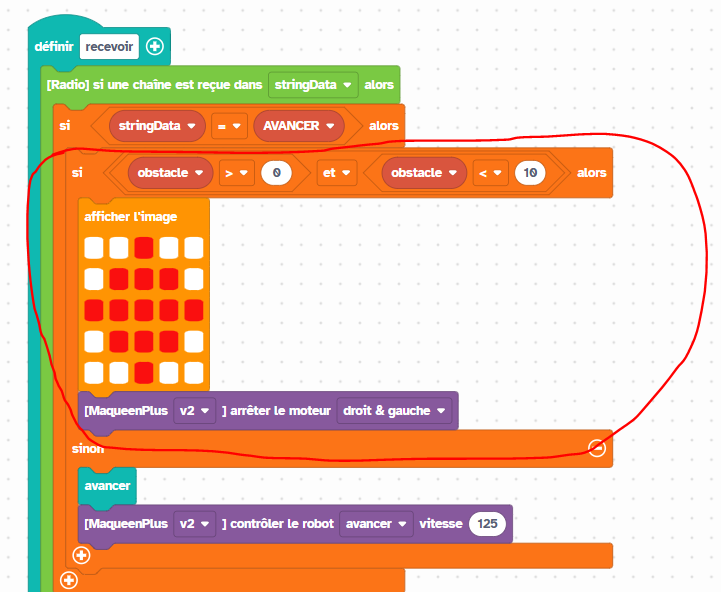
Optimise pour détecter seulement un obstacle entre > à 0 et < 20 centimètres :
Supprime tous les retours ayant une valeur inférieure à 0 pour conserver la valeur précédente. Il est possible que des valeurs de retour soient égales à -1 dans une série de valeurs indiquant la distance à un obstacle.
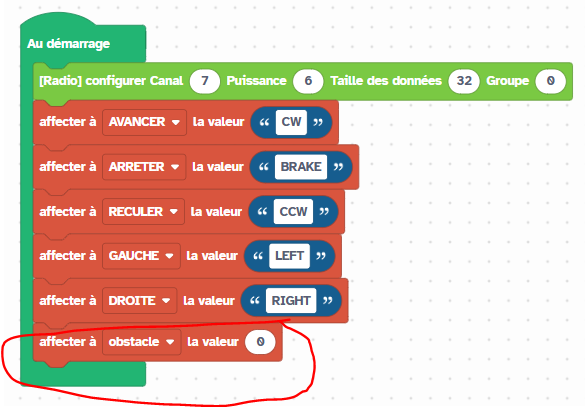
N’oublie pas de déclarer la variableobstacle comme une variable globale afin qu’elle soit accessible dans tout le programme.