Comment les véhicules autonomes naviguent-ils avec précision dans les réseaux routiers urbains complexes et les rues très fréquentées ? Comment les robots logistiques trouvent-ils efficacement les itinéraires optimaux dans les entrepôts labyrinthiques ? Ces problèmes, en apparence complexes, peuvent être explorés et résolus grâce à notre voiture UNIHIKER K10 !
Dans le cadre de ce projet, tu vas concevoir un robot de navigation routière. Ce robot sera capable d’identifier avec précision les intersections en T et les carrefours, et permettra également au véhicule de suivre des itinéraires prédéfinis et d’effectuer des manœuvres de virage aux intersections complexes. Il s’agit non seulement d’un projet de programmation stimulant, mais aussi d’une avancée significative vers les technologies de transport intelligent de demain.

Objectif de la tâche
Utilisez les algorithmes intégrés de l’UNIHIKER K10 pour détecter les intersections en T et les carrefours, permettant ainsi à la voiture d’identifier avec précision les intersections et d’exécuter des virages spécifiques en fonction de chemins prédéfinis au sein d’un réseau routier complexe.


Points clés
- Maîtriser l’utilisation des algorithmes intégrés pour reconnaître les intersections complexes telles que les carrefours et les intersections en T.
- Apprendre les méthodes de détection des intersections et de contrôle des virages.
- Comprendre le concept de « réseau routier » et le rôle de la planification des itinéraires dans les futurs systèmes de transport.
Liste des matériaux
Configuration matérielle requise :

Exercice pratique
Maintenant que tu maîtrises les commandes de base du véhicule, tu vas aborder des scénarios plus complexes. Les deux tâches suivantes te guideront dans la mise en pratique de la détection des intersections et de la planification de la navigation, te permettant ainsi d’exploiter pleinement les capacités de perception et de prise de décision du véhicule.
Tâche 1 : Détection d’intersections complexes
En mode requête, le véhicule détecte en continu l’état actuel de l’intersection et fournit un retour d’information en temps réel sur les résultats de la reconnaissance. Les informations relatives à l’intersection identifiée s’affichent sur l’écran du UNIHIKER K10.
Tâche 2 : Chemin de navigation spécifié
En se basant sur un itinéraire prédéfini, planifie à l’avance le trajet de navigation du véhicule et programme le pour qu’il suive strictement cet itinéraire pendant son fonctionnement.
Tâche 1 : Détection d’intersections complexes
1. Connexion matérielle
Connecte le Maqueen à ton ordinateur à l’aide d’un câble USB 3.0 vers Type-C.
Remarque : L’extrémité de type C doit être connectée au UNIHIKER K10.

2. Préparation du logiciel
Ouvre Open Mind+ et suit les étapes de préparation du logiciel comme indiqué dans le schéma ci-dessous.

3. Programmation
(1) Configuration initiale
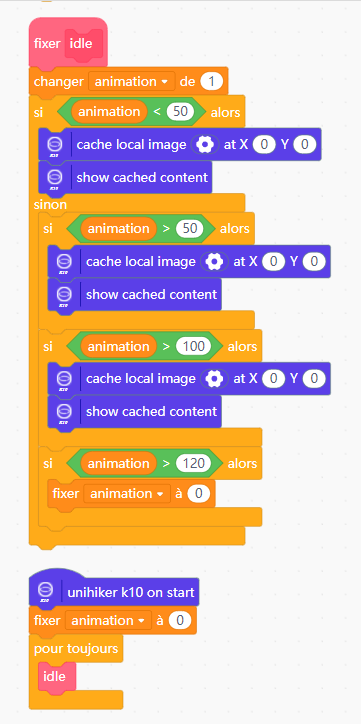
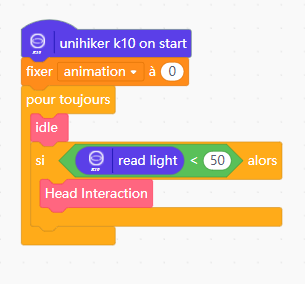
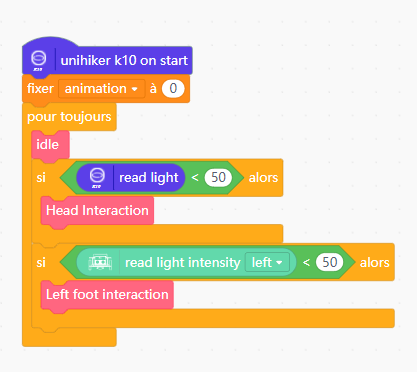
Pour utiliser la fonction de suivi de ligne intégrée du Maqueen Plus V3, exécute les opérations suivantes lorsque le message « UNIHIKER K10 On Start » s’affiche :
- → Utilise la commande « System initialization module » pour vous assurer que tous les modules fonctionnent correctement ;
- → Utilise la commande « set up a patrol route speed » pour régler la voiture à la vitesse de suivi de ligne la plus basse ;
- → Utilise la commande « patrolling on » pour activer la fonction de suivi de ligne, permettant à la voiture de circuler le long de la ligne noire.

(2) Détection d’intersections complexes
Dans la commande « forever », utilise l’instruction conditionnelle « If…Then » pour déterminer le type d’intersection actuellement détectée par la voiture.
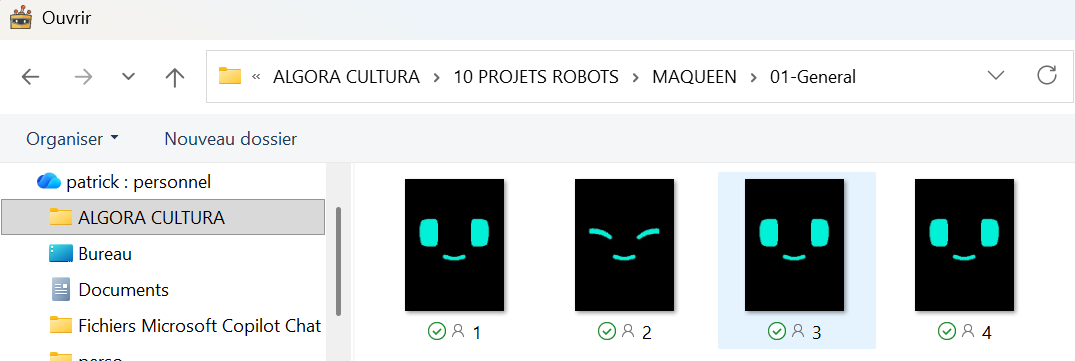
Remarque : En mode requête, la voiture affiche différentes valeurs numériques lorsqu’elle reconnaît différents types d’intersections lors du suivi de ligne :
- : Carrefour (intersection à 4 voies)
- : Jonction en T
- : Virage à gauche en ligne droite
- : Virage à droite en ligne droite
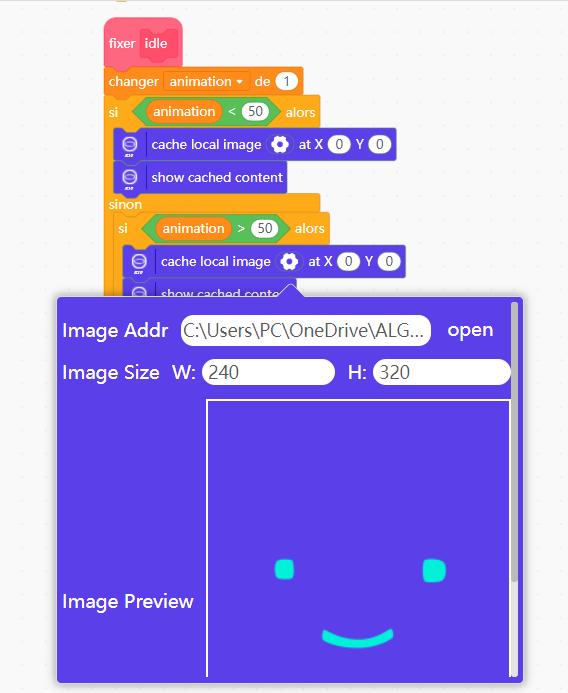
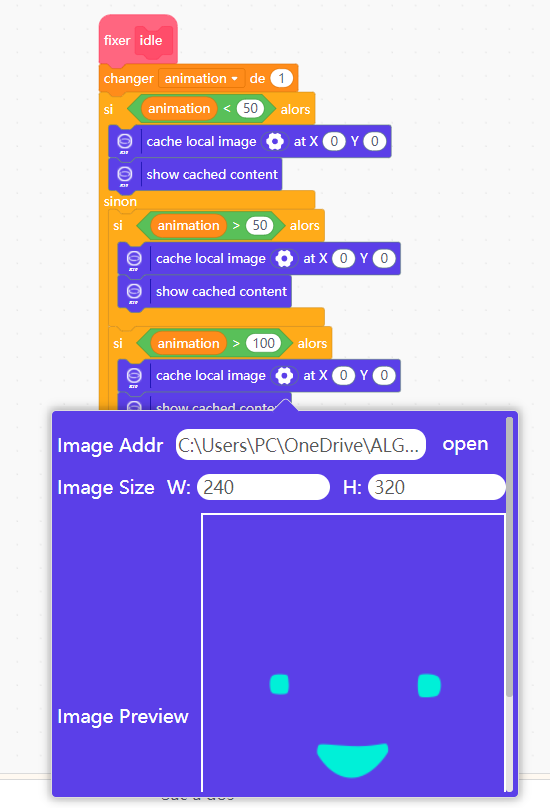
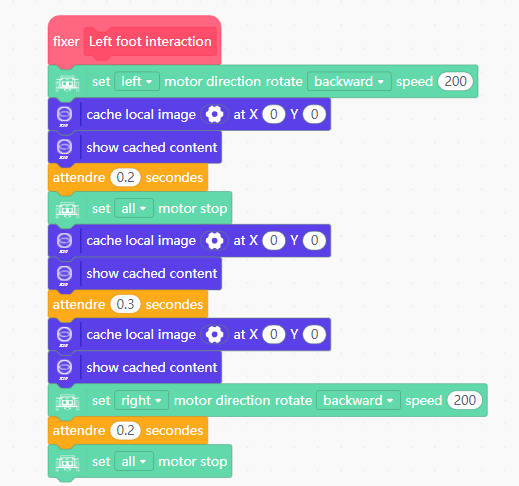
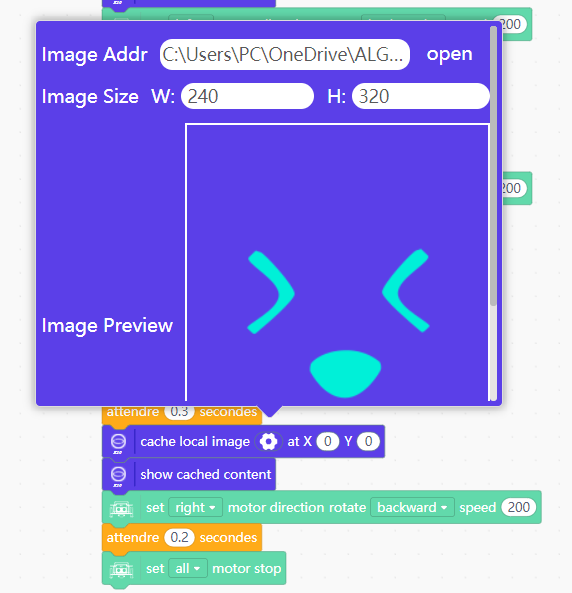
Lorsque la commande « intersection detecting » renvoie la valeur 1, utilisez les commandes « cache text » et « Afficher le contenu mis en cache » pour afficher le texte « Carrefour détecté » sur l’écran UNIHIKER K10.

De même, lorsque la commande « intersection detecting » renvoie la valeur 2, indiquant qu’une intersection en T a été détectée, affichez le texte « Intersection en T détectée » sur l’écran UNIHIKER K10.

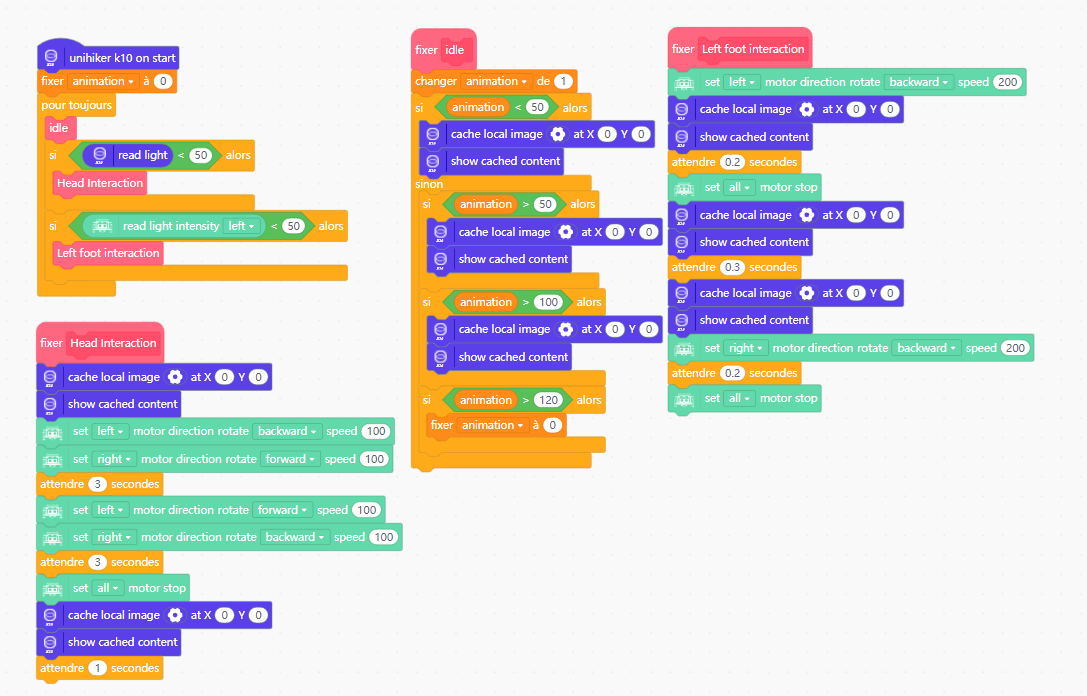
Lorsqu’une intersection avec virage à gauche suivi d’une voie continue ou virage à droite suivi d’une voie continue est détectée, la même méthode de vérification conditionnelle et d’affichage du texte est utilisée. Le programme complet est le suivant :

4. Exécution du programme
Avant de lancer le programme, assure-toi que le UNIHIKER K10 est correctement connecté à ton ordinateur via un câble USB. Après vérification, clique sur le bouton « Télécharger » du logiciel. Placezle véhicule sur la carte de suivi de ligne et allumez-le pour lancer le suivi. Lors de la détection d’intersections complexes, l’écran du UNIHIKER K10 affichera le type d’intersection correspondant.

Tâche 2 : Chemin de navigation spécifié
1. Programmation
(1) Planification du trajet Avant d’écrire le programme, planifie un itinéraire sur la carte comportant quatre types d’intersections. La voiture parcourra le trajet du point de départ à l’arrivée en passant par : deux intersections avec virage à gauche et possibilité de continuer tout droit, une intersection avec virage à droite et possibilité de continuer tout droit, deux carrefours et un carrefour en T. Chaque intersection est clairement indiquée par le sens de circulation correspondant, comme illustré ci-dessous :

(2) Configuration initiale
- → Utilise la commande « System initialization module » pour vous assurer que tous les modules fonctionnent correctement ;
- → Utilise la commande « set up patrol route speed » pour régler la voiture à la vitesse minimale de suivi de ligne ;
- → Utilise la commande « patrolling on » pour activer la fonction de suivi de ligne, permettant à la voiture de circuler le long de la ligne noire.

(3) Chemin de navigation spécifié
1) Jonctions en T (intersections 1, 5 et 6)
Sur le parcours illustré, le véhicule rencontre trois intersections en T, nécessitant à chaque fois une manœuvre de virage différente. Pour la première intersection en T, utilise la commande « setup up Trord » dans la section « UNIHIKER K10 au démarrage » afin d’effectuer un virage à gauche.

Lors de la deuxième intersection en T, les commandes de contrôle direct ne peuvent pas être utilisées pour les virages. Dans la commande « forever », implémente une logique conditionnelle à l’aide de l’instruction « if…then » pour évaluer la commande « intersection detecting ».

Crée une nouvelle variable « flag_T » pour comptabiliser le nombre de passages aux intersections en T. Lorsque la commande « intersection detecting » renvoie la valeur 1 (condition vraie), incrémentez cette variable à l’aide de la commande « Changer flag_T de 1 ».

Lorsque la variable flag_T vaut 1, cela indique que le véhicule rencontre une deuxième intersection en T. Utilise la commande « set up Trord à droite » pour effectuer un virage à droite.

Lorsque la variable flag_T atteint 3, marquant la troisième rencontre d’une jonction en T, utilisez la commande « set up Trord stop» pour interrompre le fonctionnement de suivi de ligne de la voiture.

2) Jugement au carrefour (intersections 2 et 3)
De même, lors de la première rencontre à un carrefour, utilisez la commande « set up intersection à gauche » dans la section « UNIHIKER K10 au démarrage » pour effectuer un virage à gauche.

Au deuxième carrefour, dans le programme « Forever », évaluez la commande « intersection detecting ». Si cette commande renvoie la valeur 1, utilisez la commande « Définir la trajectoire droite au carrefour » pour maintenir une trajectoire rectiligne.

3) Intersection avec virage à gauche et voie droite (Intersection 5)
Ce type d’intersection n’apparaît qu’une seule fois. Dans la section « UNIHIKER K10 Au démarrage », utilisez la commande « set up left or straight » pour maintenir une trajectoire rectiligne à travers cette intersection.

Le programme complet est le suivant :

2. Exécution du programme
Avant de lancer le programme, assure toi que le UNIHIKER K10 est correctement connecté à ton ordinateur via un câble USB. Après vérification, clique sur le bouton « Télécharger » du logiciel. Place le Maqueen sur la carte de suivi de ligne et allume-le pour lancer le suivi de ligne selon le parcours prédéfini.

3. Pratique pratique
Coin des connaissances
1. Qu’est-ce qu’un « réseau routier » ?
Un réseau routier désigne un système interconnecté de routes au sein d’une zone spécifique, formant un réseau de voies. Dans notre vie quotidienne, que ce soit dans les rues des villes, sur les campus, dans les usines ou les entrepôts, on peut considérer tous ces lieux comme des réseaux composés de routes et d’intersections : ce que l’on appelle un « réseau routier ».

1. Définition et composition des réseaux routiers
Un réseau routier est un système interconnecté de routes à différents niveaux, formant une structure de transport en forme de toile. Selon les régions, les réseaux routiers peuvent comprendre différents types de routes, comme les autoroutes, les routes urbaines et les routes rurales.
2. Classification des réseaux routiers
Réseaux routiers : Principalement composés de routes à différents niveaux, reliant les villes, les villages et les principaux nœuds de transport, constituant la composante principale du transport régional.
Réseaux routiers urbains : Réseaux formés par diverses routes au sein des zones urbaines, constituant l’infrastructure fondamentale des transports urbains.
3. Fonctions et rôles des réseaux routiers
Les réseaux routiers constituent l’ossature des transports urbains, offrant des voies de circulation à divers types de véhicules. Ils garantissent des déplacements sûrs, efficaces, économiques et confortables. La conception et l’optimisation des réseaux routiers sont essentielles pour réduire les embouteillages et améliorer l’efficacité des transports.
2. Quel rôle joue la planification des trajectoires dans les transports du futur ?
Imagine une ville du futur où les voitures circulent de manière autonome grâce à des systèmes intelligents, sans intervention humaine. Dans ce système, la planification d’itinéraire fait office de « cerveau » pour le véhicule, l’aidant à déterminer les trajets optimaux au sein de réseaux routiers complexes.

Les fonctions de la planification de trajectoire peuvent être résumées comme suit :
1. Gain de temps et réduction du trafic
Les véhicules autonomes sélectionnent les itinéraires les plus rapides en fonction des conditions de circulation en temps réel, évitant ainsi les embouteillages pour atteindre leur destination plus rapidement.
2. Amélioration de la sécurité et prévention des accidents
Il détecte de manière proactive les obstacles et les dangers, et ajuste automatiquement les itinéraires pour éviter les collisions.
3. Optimisation du trafic à l’échelle du système
Lorsque plusieurs véhicules planifient intelligemment leurs itinéraires, la circulation urbaine est plus fluide et le temps d’attente réduit.
4. Livraison autonome fiable
Les robots de livraison et les véhicules logistiques autonomes s’appuient sur la planification d’itinéraires pour naviguer avec précision dans les villes et les entrepôts, permettant ainsi une livraison de colis efficace avec une intervention humaine minimale.
En substance, la planification d’itinéraires fonctionne comme une carte de navigation invisible, permettant aux futurs véhicules et robots de « voir » intelligemment les routes et de garantir ainsi des arrivées sûres et rapides. Les systèmes de transport intelligents de demain reposeront fondamentalement sur ce « cerveau intelligent ».
Releve le défi
Imagine notre voiture dans un labyrinthe complexe : pourrait-elle utiliser son « intelligence » pour trouver la sortie ? N’est-ce pas à la fois fascinant et stimulant ? Voyons maintenant comment concevoir un tel robot capable de résoudre des labyrinthes, de reconnaître automatiquement les chemins, d’éviter les obstacles et, finalement, d’atteindre sa destination !