
Comment suivre la ligne noire
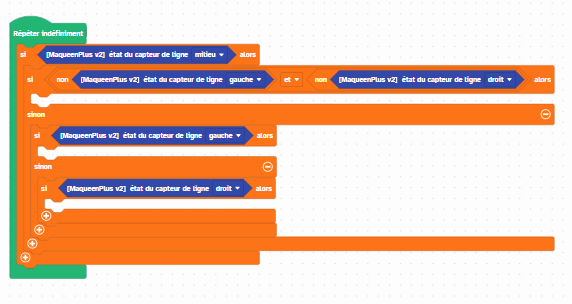
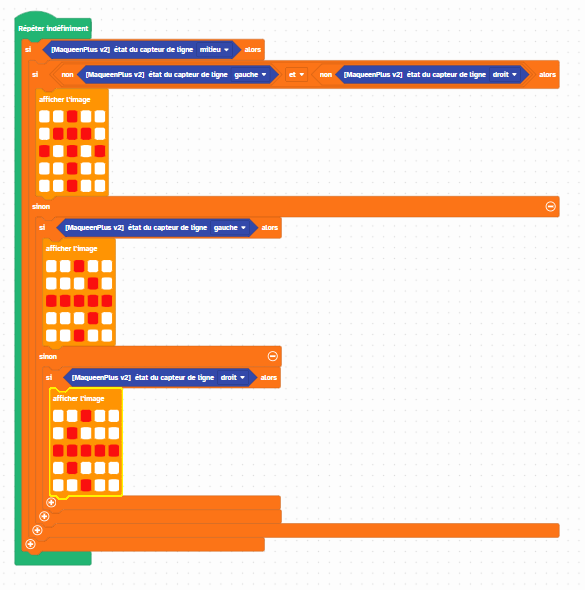
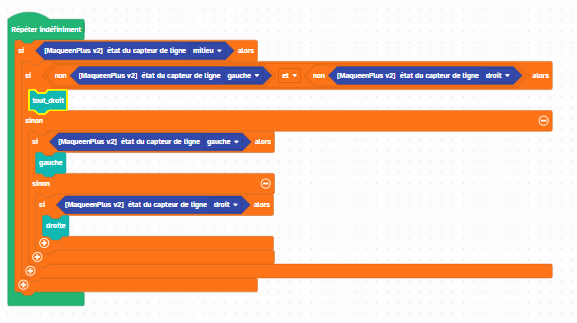
Programme ton robot pour qu’il tente de rester sur la ligne noire :
Le capteur de gauche et celui de droite ne captent pas la ligne noire, alors les deux capteurs sont de chaque coté de la ligne noire, le robot peut avancer tout droit.
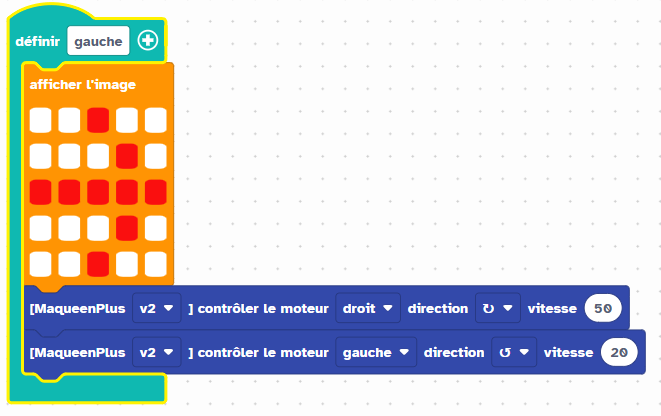
Le capteur de gauche est sur la ligne noire, ramène ton robot vers la gauche.
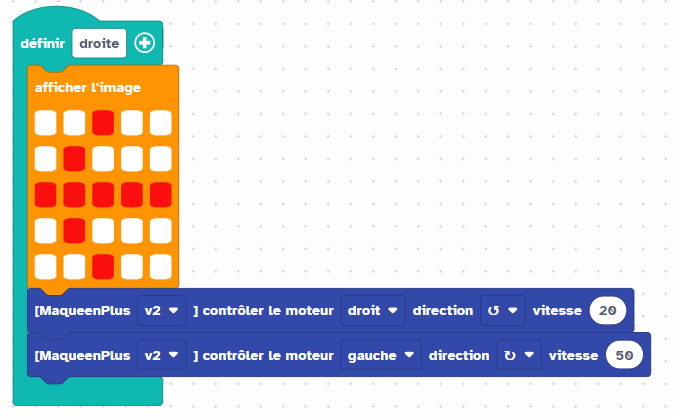
Le capteur de droite est sur la ligne noire, alors ramène ton robot vers la droite.



Premier essai pour suivre la ligne noire
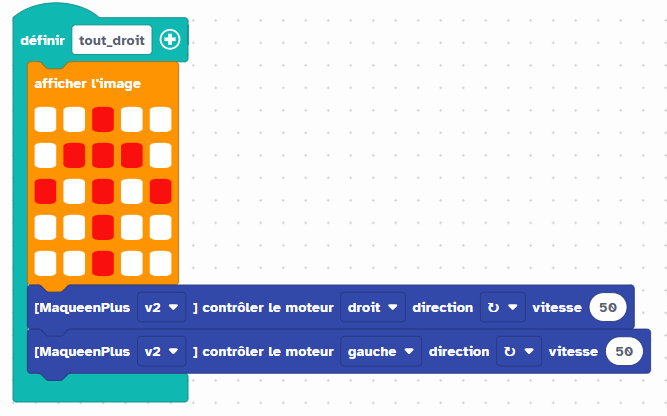
Programme les deux moteurs pour aller tout droit, à gauche et à droite.
Pour ton premier essai réduit la vitesse à 50, le Maqueen est très véloce :
Plus vite
Augmente la vitesse en utilisant une variable :



Utilise un pourcentage de la vitesse pour le moteur qui tourne en sens inverse :
par exemple si on souhaite une vitesse réduite de 35% de la vitesse initiale de 50 : (50 * 35) /100 soit :


Puis arrondir pour obtenir la partie entière de la division :



Augmente petit à petit la vitesse pour voir jusqu’à quand ton robot peut suivre la ligne noire :

Ou diminue ou augmente le pourcentage pour prendre des virages plus larges ou plus serrés :
