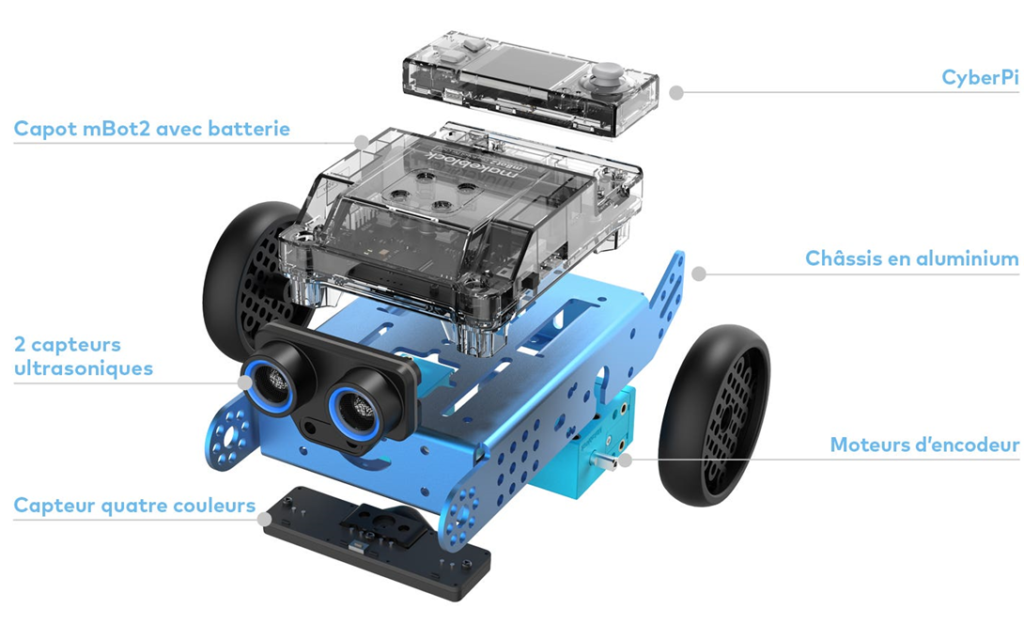
MBOT DESCRIPTION
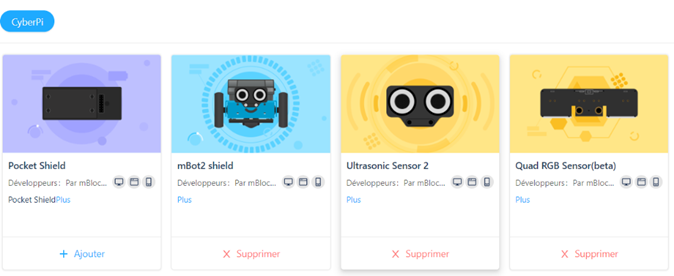
Sur l’interface de programmation MBLOCK installer les trois options :
- mBot2 shield
- Ultrasonic Sensor 2
- Quad RGB Sensor
Le dispositif CyberPi
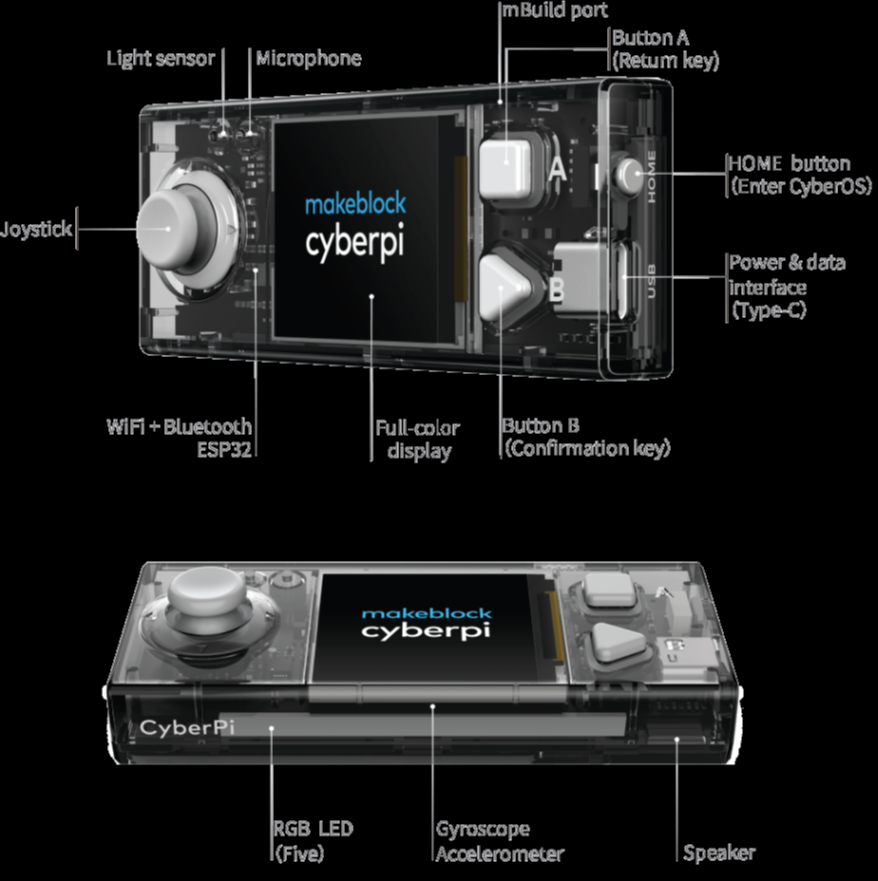
- Écran couleur, offrant des interfaces utilisateur conviviales pour l’interaction homme-machine
- Système CyberOS, vous permettant d’exécuter les programmes prédéfinis, de définir la langue du système et de mettre à jour le système via le joystick et les boutons intégrés
- Un port Micro USB (Type-C) pour la connexion aux PC pour l’alimentation et la communication
- Un port de module électronique pour connecter des modules électroniques
- Un port de carte d’extension pour la connexion aux cartes d’extension
- Plusieurs capteurs intégrés, tels qu’un capteur de lumière et un gyroscope, qui fournissent plusieurs types de sortie de données
Capteur RVB pour le suivi de la ligne noire



Plage de détection : 5 à 15 mm de l’objet à détecter
Apprentissage RVB
Double pression : lorsque vous appuyez deux fois sur le bouton, le capteur quad RVB commence à mémoriser les valeurs des couleurs de l’arrière-plan (le blanc) et de la ligne noire pour le suivi de ligne. Pour effectuer cette opération, placez les capteurs de lumière sur le parcours avec une ligne noire et appuyez deux fois sur le bouton. Lorsque vous voyez les LED clignoter rapidement, faites glisser les capteurs RVB d’un côté à l’autre au-dessus de la ligne noire sur le fond blanc du parcours pendant environ 2,5 secondes. Les valeurs des paramètres obtenues sont automatiquement stockées.
Si l’apprentissage échoue, les LED clignotent lentement et vous devez recommencer l’apprentissage.
Les instructions à connaitre
Pour détecter la ligne noire nous avons utilisé les instructions suivantes :
Pour mesurer les deux capteurs du centre :

Pour mesurer les quatre capteurs :

Pour mesurer un capteur :

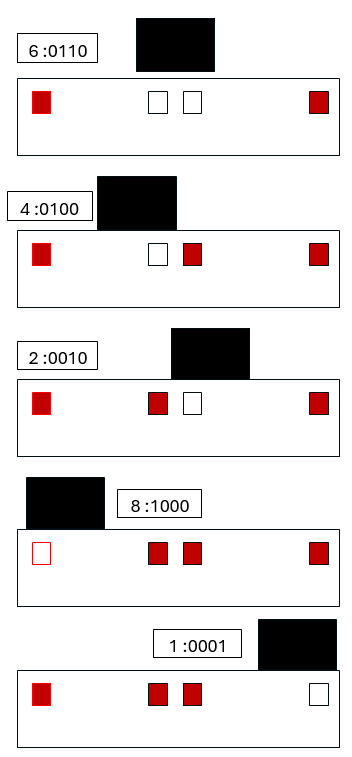
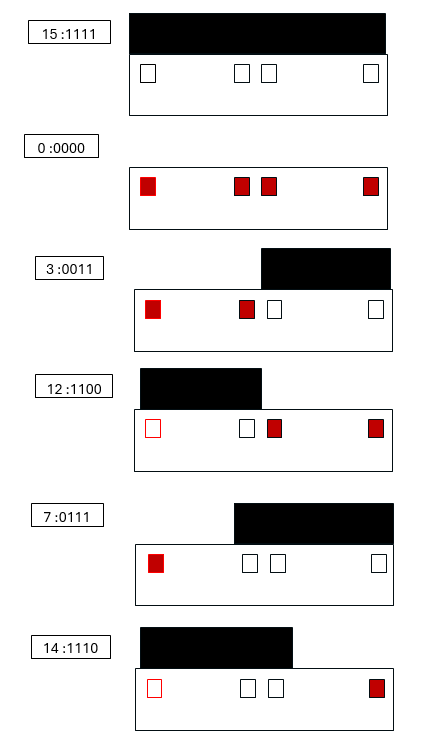
En mesurant la ligne noire, ou le fond ou une couleur :

Les différents cas de détection de la ligne noire :
Capteur ultrasons

Le capteur à ultrasons 2 peut être utilisé pour détecter la distance entre un obstacle et celui-ci. L’émetteur de gauche transmet les ondes ultrasonores et le récepteur de droite reçoit les ondes ultrasonores réfléchies.
Les êtres humains peuvent entendre des sons de 20 à 20 000 Hz. Les ondes sonores dont les fréquences sont supérieures à 20 000 Hz sont appelées ondes ultrasonores. Les ondes sonores sont réfléchies par les obstacles rencontrés et sont reçues par le récepteur du capteur à ultrasons. En fonction du temps écoulé entre l’émission et la réception, les distances entre le capteur à ultrasons et les obstacles peuvent être calculées.
Présence d’un obstacle :

Distance avec un obstacle

Gestion des deux moteurs encodeurs
Un moteur électrique encodeur est un moteur équipé d’un dispositif appelé encodeur. L’encodeur est un capteur qui mesure la position angulaire ou la vitesse de rotation du moteur. Il fournit des informations précises sur la position du moteur, ce qui est essentiel pour contrôler avec précision le mouvement du robot.
EM1 : correspond au moteur gauche
EM2 : correspond au moteur droit (attention il est monté à l’envers, pour le faire avancer mettre un nombre négatif)


Gestion des événements