- Rapport Technique : Conception d’un Adaptateur pour la roue bidirectionnelle
Introduction
Dans le cadre de notre projet, nous avons conçu un adaptateur pour le robot MBOT 2 afin d’améliorer sa capacité à suivre une ligne noire et à franchir des obstacles. Ce rapport détaille les étapes de conception, les défis rencontrés et les solutions mises en place pour atteindre nos objectifs.
Objectifs du Projet
- Permettre au robot MBOT 2 de suivre une ligne noire de manière précise.
- Assurer le franchissement des obstacles.
- Améliorer la stabilité et la maniabilité du robot.
Conception de l’Adaptateur
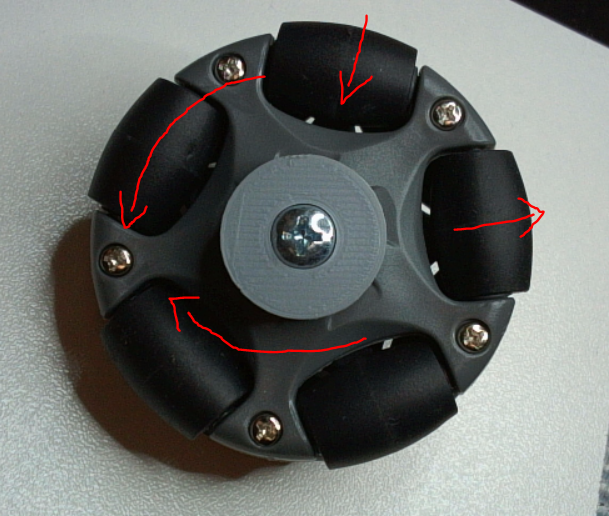
Remplacement de la Rotule par une Roue Bidirectionnelle
Le robot MBOT 2 dispose de base d’une rotule lui permettant de tourner. Cependant, cette rotule ne permet pas au robot de passer les obstacles. Nous avons donc choisi de remplacer la rotule par une roue bidirectionnelle. L’avantage de cette roue est qu’elle permet de tourner dans toutes les directions comme la rotule de base, tout en permettant le franchissement des obstacles.
Première version : deux roues bidirectionnelles
Nous avons conçu une première version avec deux roues bidirectionnelles. Cependant, après réflexion, nous avons réalisé que cette configuration n’était pas optimale.
Deuxième version : une roue bidirectionnelle centrale
Nous avons donc réalisé une deuxième version avec une seule roue bidirectionnelle au centre du robot. Cette version a donné de bons résultats et nous a permis d’économiser une roue par robot. Dans cette version, nous avons installé la roue avec l’axe vers l’avant du robot, la roue contre l’avant du robot.
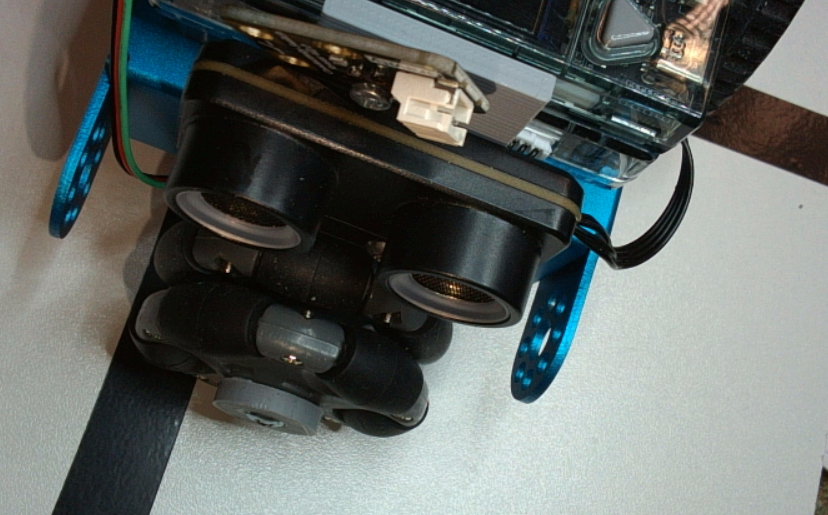
Troisième version : roue parallèle au robot
Nous avons remarqué que dans la disposition précédente, la roue bidirectionnelle avait tendance à rouler sur le côté sur les obstacles et dans le bas de la pente. Nous avons donc réalisé une troisième version avec la roue parallèle au robot. Cette configuration a amélioré la stabilité et la maniabilité du robot.
Intégration de capteurs
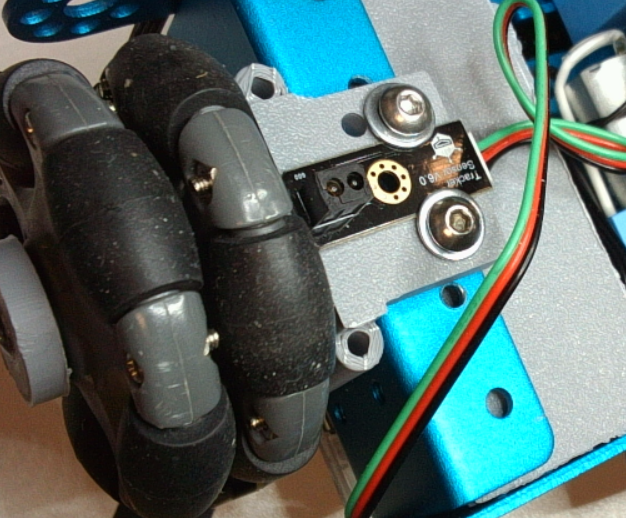
Traqueur de Ligne
Nous avons intégré un traqueur de ligne pour améliorer le suivi de ligne du robot, notamment pour qu’il puisse se redresser sur les lignes droites afin que le robot soit bien parallèle à la ligne noire pour une meilleur prise en compte des carrés verts.
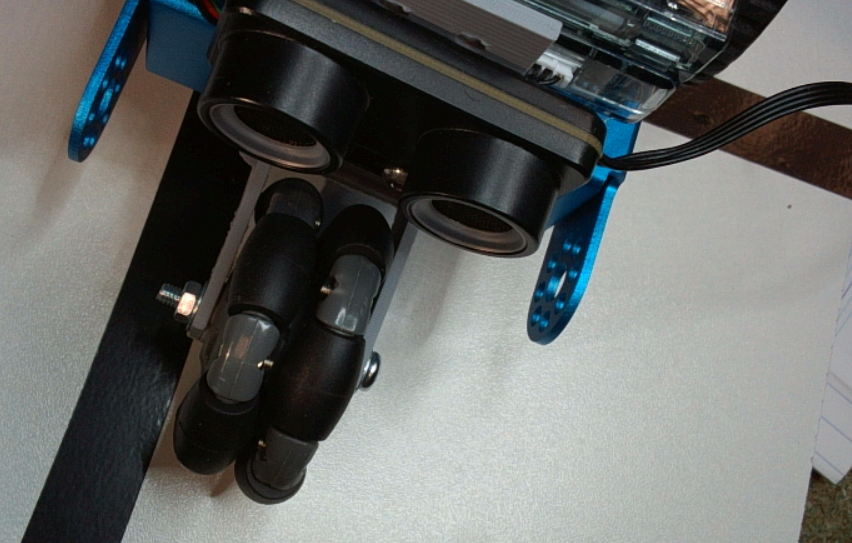
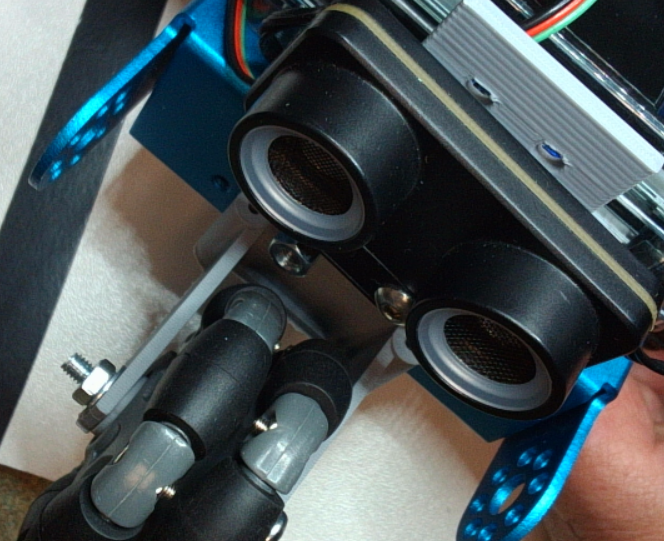
Capteur ultrasons
Un capteur ultrasons a été ajouté pour la détection des obstacles, permettant au robot de les éviter.
Dispositif de détection de bande Conductrice
Nous avons également intégré un dispositif pour détecter la bande conductrice d’électricité afin d’avoir la connaissance de l’arrivée dans la zone de survie.

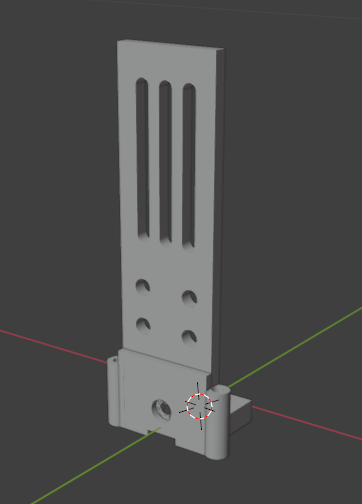
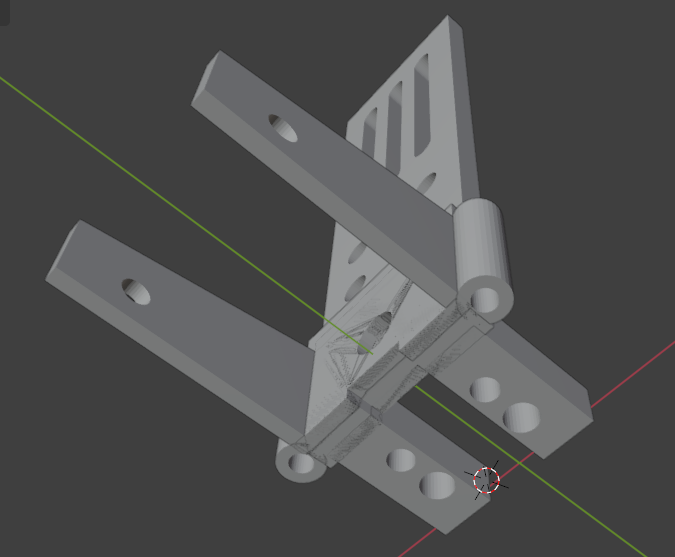
Conception des Adaptateurs avec Blender
Utilisation de Blender
Le travail de conception des adaptateurs du MBOT 2 a été réalisé avec l’outil Blender. Juliette, qui avait déjà une maîtrise de cet outil, a pris en charge le dessin des pièces suite à nos échanges, constatations et idées.
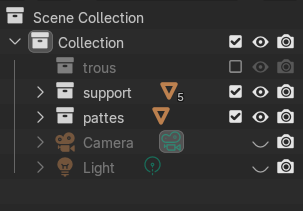
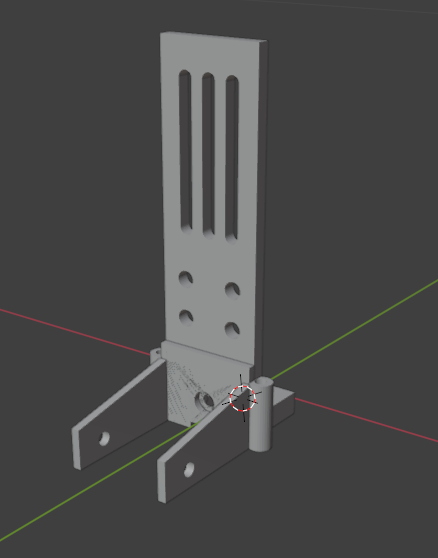
Organisation du Travail
Afin de bien organiser son travail, Juliette a mis en place sous Blender des collections en fonction des configurations de nos adaptateurs. Cette organisation a permis de structurer les différentes pièces et de faciliter les modifications et les ajustements.
Modification des Unités
Juliette a également modifié les unités de base dans Blender pour se mettre à l’unité millimètre. Cette modification a été essentielle pour assurer la précision des dimensions des pièces conçues.
Tests et Validation
Nous avons effectué plusieurs tests pour valider nos modifications. Les résultats ont montré que les adaptateurs conçus avec Blender permettent au robot MBOT 2 de mieux répondre aux exigences de la compétition. Les pièces dessinées par Juliette ont été fabriquées et intégrées au robot, améliorant ainsi ses performances.