- Conception d’un Adaptateur RGB pour le Robot MBOT 2
Introduction
Dans le cadre de notre projet, nous avons conçu un adaptateur RGB pour le robot MBOT 2 afin d’améliorer sa capacité à suivre une ligne noire dans diverses conditions, notamment sur des pentes et des angles droits. Ce rapport détaille les étapes de conception, les défis rencontrés et les solutions mises en place pour atteindre nos objectifs.
Objectifs du Projet
- Permettre au robot MBOT 2 de suivre une ligne noire de manière précise.
- Assurer une bonne mesure de la ligne noire même sur des pentes.
- Adapter la position du capteur RGB pour qu’il soit au plus proche du sol sans dépasser les roues.
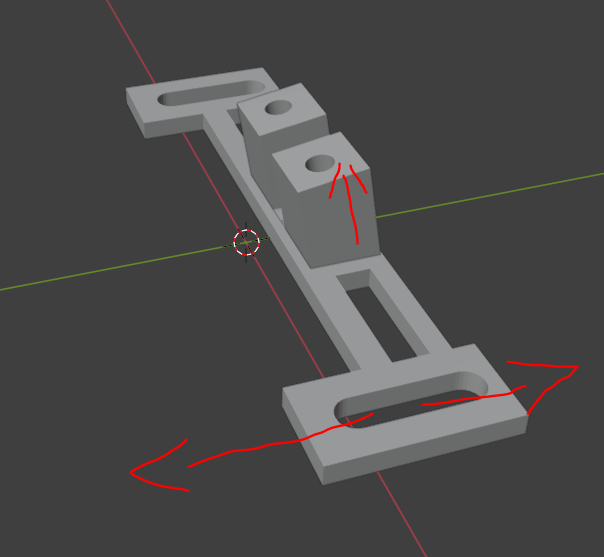
Conception de l’Adaptateur RGB
Positionnement du Capteur
Pour que le robot suive correctement la ligne noire, notamment sur des angles droits, nous avons dû rapprocher le capteur RGB des roues. Nous avons déterminé une distance optimale entre l’axe des roues et la position du capteur RGB. Cette distance permet au capteur de détecter la ligne noire avec précision.
Réglage de la Distance
Dans la conception de l’adaptateur, nous avons prévu une fente qui permet de régler cette distance. Cette fente offre une flexibilité nécessaire pour ajuster la position du capteur en fonction des conditions spécifiques de la piste.
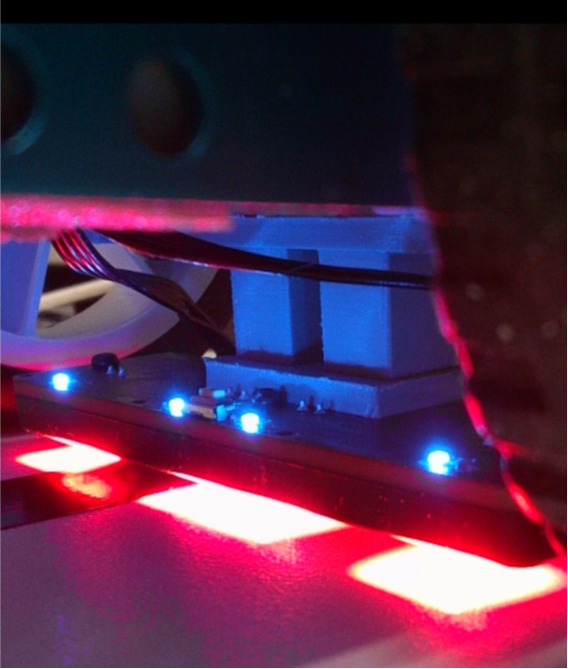
Adaptation pour les Pentes
Nous avons constaté que dans les pentes, le capteur RGB s’éloignait du sol, ce qui rendait la mesure de la ligne noire imprécise. Pour résoudre ce problème, nous avons conçu l’adaptateur de manière à ce que le capteur RGB soit positionné sous les roues, au plus proche du sol. Nous avons également donné un angle au capteur pour qu’il reste proche du sol lors de l’attaque de la pente.
Contraintes Mécaniques
Le capteur RGB ne doit pas dépasser les roues pour éviter les obstacles. Nous avons donc veillé à ce que l’adaptateur respecte cette contrainte tout en permettant une mesure précise de la ligne noire.
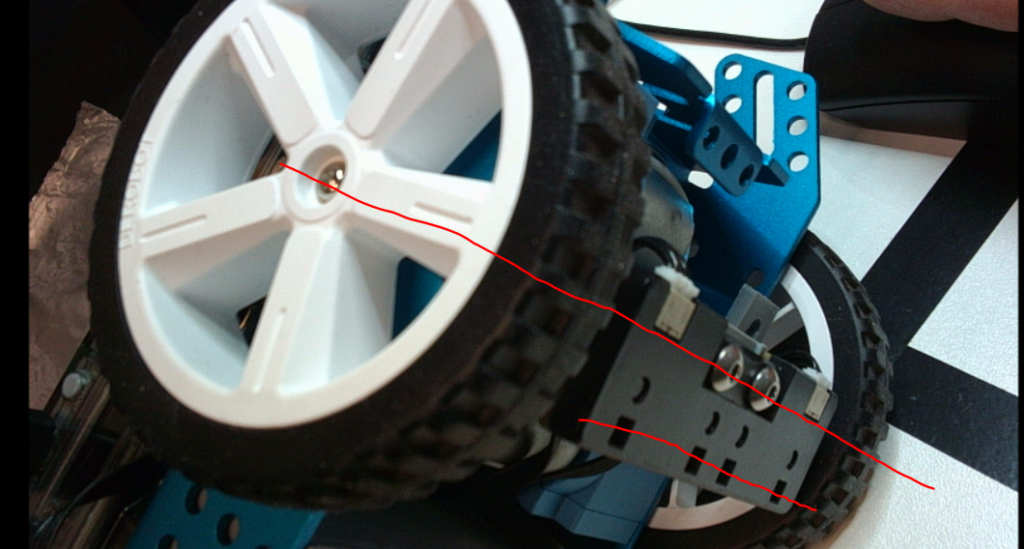
Tests et Validation
Nous avons produit plusieurs adaptateurs à l’imprimante 3D et effectué de nombreux tests pour valider la conception de l’adaptateur. Les résultats ont montré que l’adaptateur permet au robot de suivre la ligne noire avec précision, même sur des pentes et des angles droits. Le réglage de la distance via la fente s’est avéré très utile pour optimiser la performance du capteur dans différentes conditions.
Conclusion
La conception de cet adaptateur RGB pour le robot MBOT 2 a été un défi technique intéressant. Grâce à notre travail, le robot peut maintenant suivre une ligne noire de manière précise dans diverses conditions. Nous avons compris l’importance de l’ajustement et de l’adaptation dans la conception des adaptateurs avec l’impression 3D pour répondre aux exigences de la compétition.
Le robot à l’horizontale, le capteur RGB mesure correctement la ligne noire.
Lorsque le robot attaque une pente, le capteur RGB s’éloigne de la ligne noire. Si la distance est trop importante entre le capteur RGB et le sol, la mesure devient imprécise et fausse.

Avec l’adaptateur que nous avons conçu, le capteur RGB est sous les roues pour une distance optimum entre les capteurs et l’axe des roues pour un suivi des angles droits de la ligne noire et pour une mesure optimum lors du passage des pentes.
La fente permet un réglage fin de l’adaptateur sur le MBOT2 et l’inclinaison permet au capteur RGB d’être au plus près du sol lors de la montée de la pente.