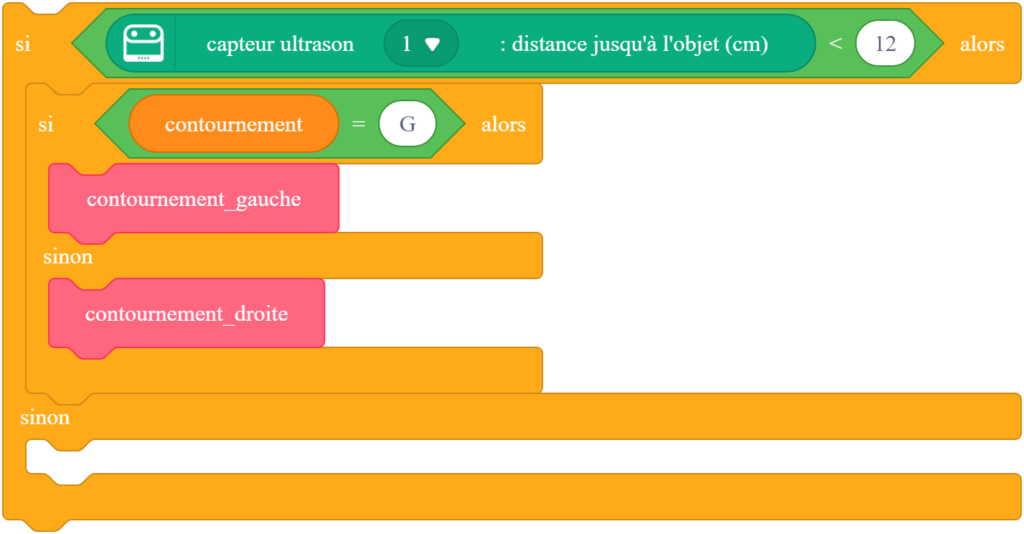
Le robot est confronté à un obstacle sur son parcours, il doit le détecter puis le contourner en utilisant un capteur à ultrasons. Le robot doit contourner l’obstacle par la droite ou par la gauche en fonction de la configuration du parcours.
Fonctionnement du Capteur à Ultrasons
Le capteur à ultrasons fonctionne en émettant des ondes sonores à haute fréquence (ultrasons) et en mesurant le temps que ces ondes mettent à revenir après avoir rebondi sur un obstacle. Voici comment cela fonctionne :
- Émission des Ultrasons : Le capteur émet des ondes ultrasonores.
- Réflexion : Les ondes rebondissent sur l’obstacle.
- Réception : Le capteur reçoit les ondes réfléchies.
- Calcul de la Distance : Le capteur mesure le temps écoulé entre l’émission et la réception des ondes. En utilisant la vitesse du son dans l’air, il calcule la distance jusqu’à l’obstacle.

Analyse de la Configuration du Parcours
Avant de lancer le robot, il faut analyser la configuration du parcours pour déterminer la meilleure direction de contournement (droite ou gauche). Cette décision peut être basée sur :
- La position de l’obstacle par rapport à la ligne noire.
- La présence d’autres obstacles ou de limites sur le parcours.
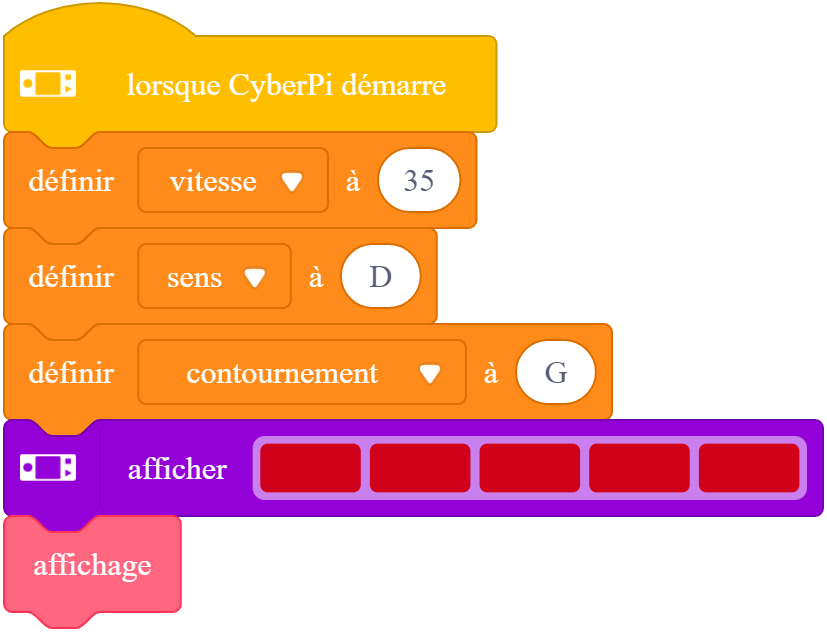
Mémorise ce choix dans une variable contournement :
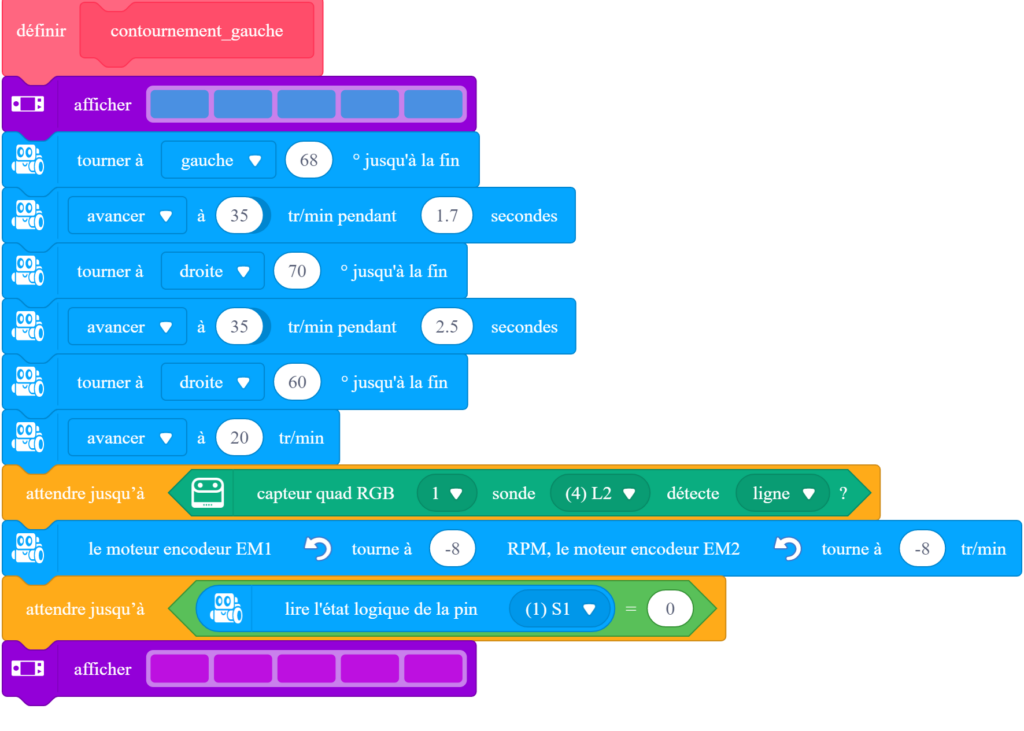
Contournement par la gauche :
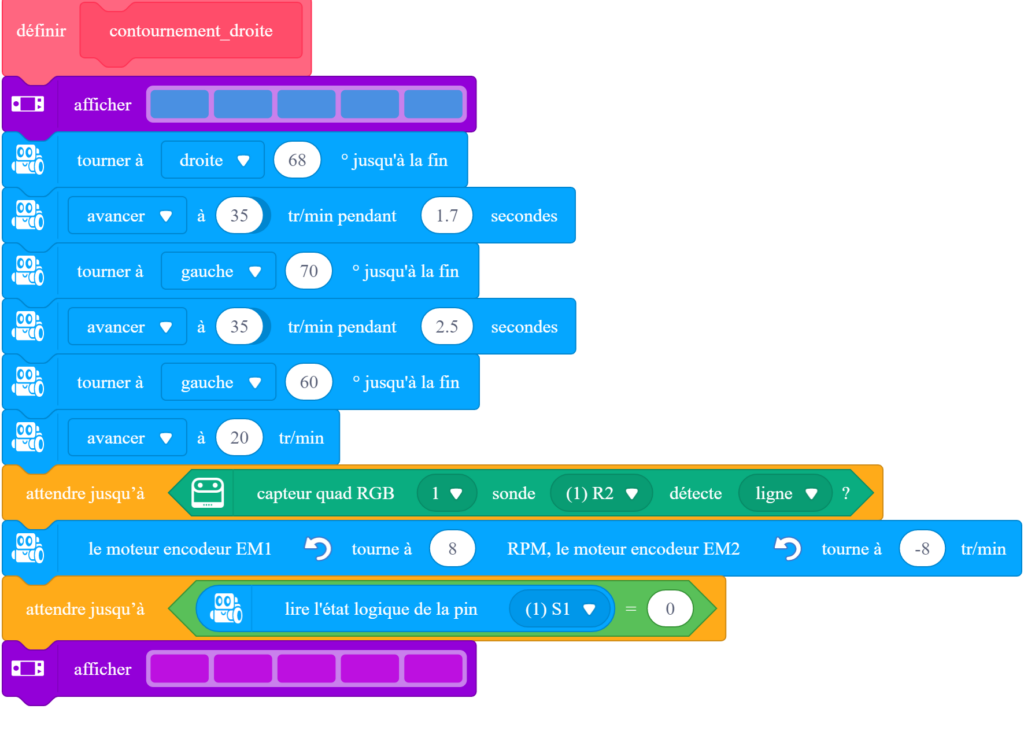
Contournement par la droite :