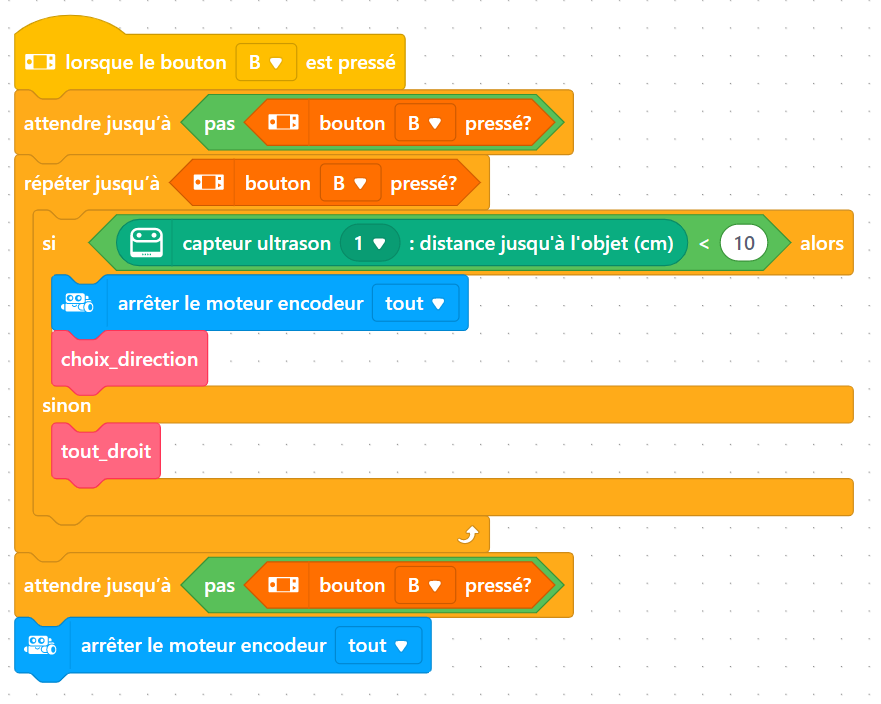
Le défi proposé consiste à programmer un robot capable de suivre un couloir au centre, de s’arrêter en fin de couloir, puis de choisir une nouvelle direction en privilégiant une possibilité d’un nouveau couloir à droite.
Le robot est équipé de trois capteurs de collision :
Un capteur avant : détecte la fin du couloir ou un obstacle frontal.
Un capteur latéral droit : permet de rester centré dans le couloir et de vérifier si un passage existe à droite.
Un capteur latéral gauche : même rôle que le droit, mais du côté gauche.
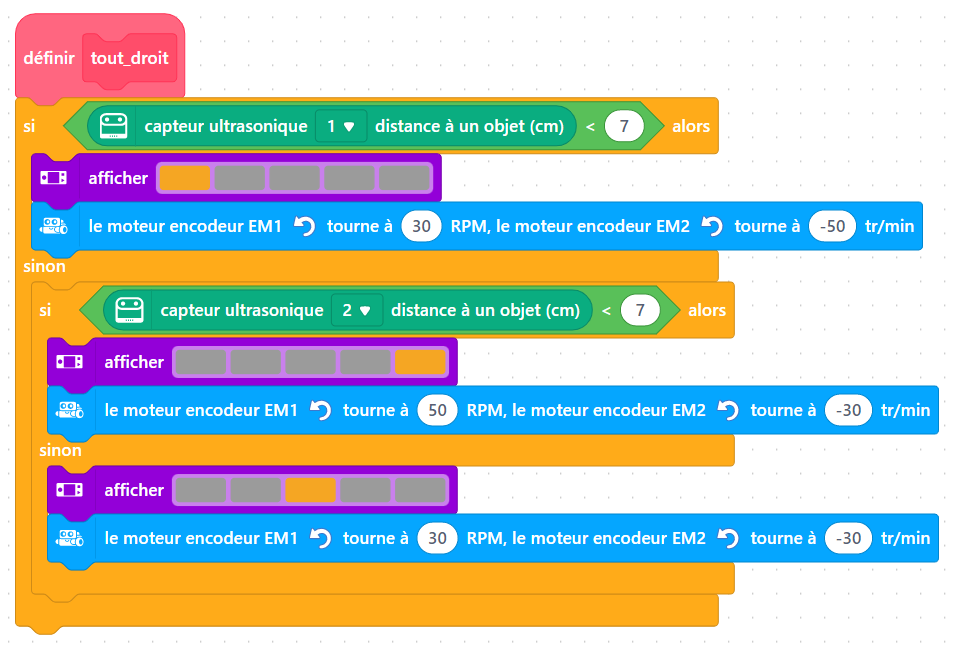
Suivre le couloir au centre
Tant que le capteur avant ne détecte pas la fin du couloir :
le robot avance,
il vérifie la distance avec les murs grâce aux capteurs gauche et droit,
si l’un des murs est trop proche, il s’en éloigne légèrement pour rester centré.
Détection de fin de couloir
Lorsque le capteur avant détecte un obstacle frontal ou l’absence de mur en face :
le robot s’arrête,
il regarde à droite, puis à gauche, pour déterminer s’il existe un nouveau couloir dans l’une de ces directions.
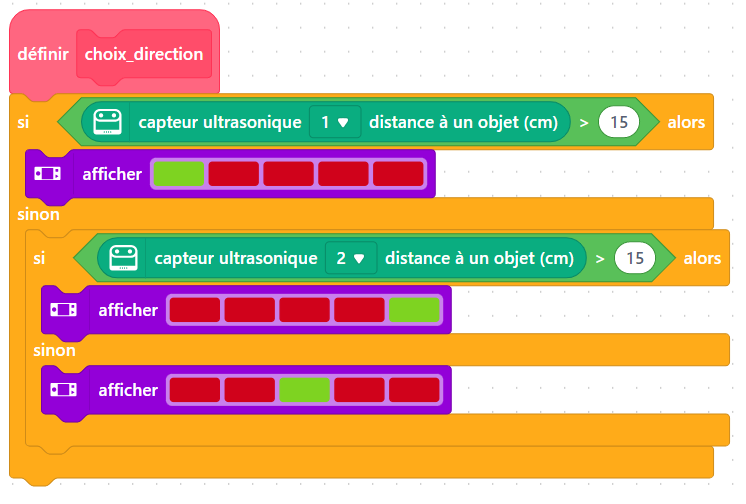
Choix de la direction
Si un passage existe à droite, il tourne à droite et avance.
Sinon, si un passage existe à gauche, il tourne à gauche et avance.
Sinon, aucune direction n’est possible : le robot effectue un demi-tour.
Algorithme simplifié
répéter :
si capteur avant détecte fin du couloir :
arrêter le robot
si côté droit ouvert :
tourner à droite
sinon si côté gauche ouvert :
tourner à gauche
sinon :
faire demi-tour
sinon :
si mur trop proche à droite : se décaler à gauche
sinon si mur trop proche à gauche : se décaler à droite
sinon avancer au centre du couloir
Comment collaborer à plusieurs sur un même projet Roblox Studio
Travailler en équipe dans Roblox Studio permet à l’équipe de créer ensemble un même jeu, en temps réel. Vous apprendrez à vous organiser, à dialoguer, et à partager des responsabilités comme dans un vrai studio de jeux vidéo !
Pourquoi collaborer ?
Les avantages :
L’équipe travaille sur le même projet, en temps réel.
Chaque membre de l’équipe peut utiliser ses points forts : script, construction…
Tous les membres partagent ses idées et se complètent : l’équipe produit un jeu plus riche et mieux pensé.
Vous apprenez à communiquer comme de vrais développeurs.
Les risques si on ne s’organise pas :
Modifier un objet qu’un autre membre est en train de changer peut générer des conflits.
Effacer par erreur le travail d’un autre membre.
Oublier d’enregistrer ou écraser la version des autres.
Règles importantes pour bien travailler en équipe :
Communiquer avant de modifier un élément du jeu.
Ne jamais supprimer un objet sans prévenir.
Toujours sauvegarder régulièrement.
Respecter les rôles définis dans l’équipe (scripteur, designer…).
ATTENTION Un seul membre de l’équipe doit créer le jeu de base
Les deux grandes étapes
Étape 1 — Un membre crée le jeu et ajoute les collaborateurs de l’équipe
Dans chaque équipe, un seul membre crée le projet Roblox Studio.
Ouvre Roblox Studio
Se connecter avec un compte 123codage inscrit sur l’ordinateur : 123codageXX (XX entre 01 et 10 selon le numéro du PC).
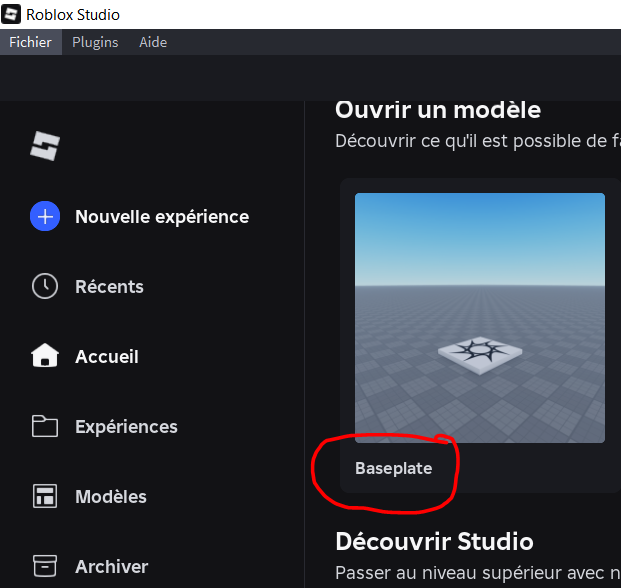
Crée un nouveau projet
Choisir Baseplate pour commencer.
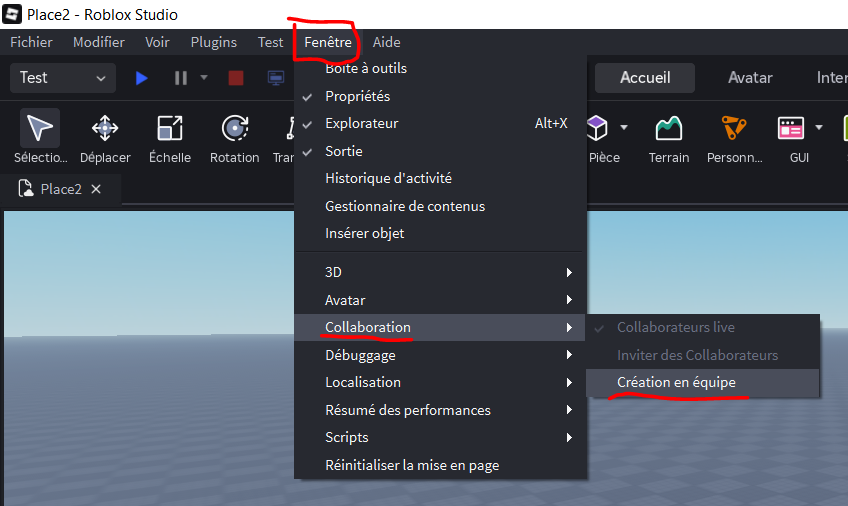
Active la collaboration
Dans le menu du haut : Fenêtre → Collaboration → Création en équipe
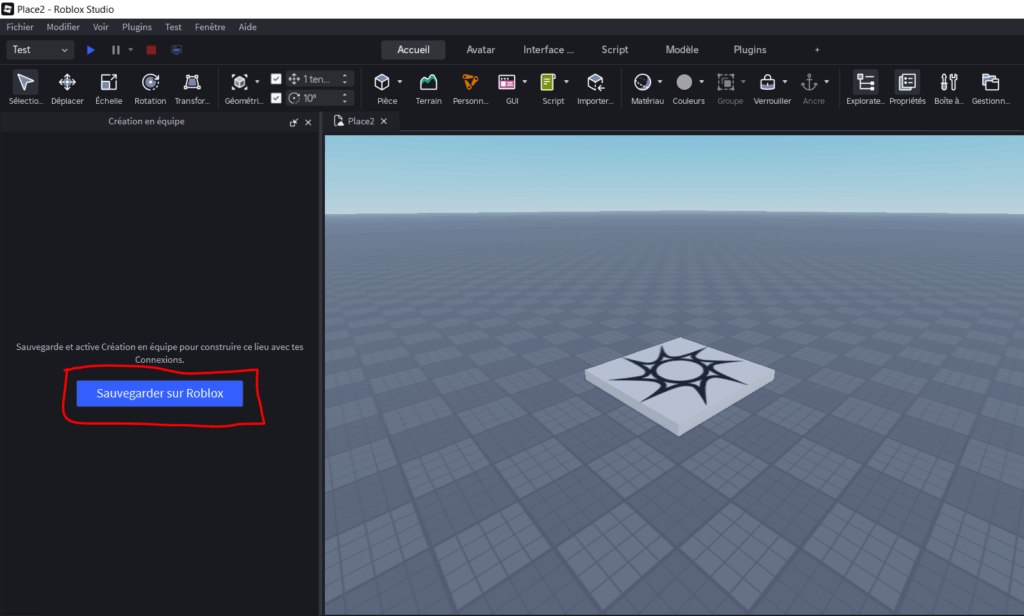
Un bouton “Sauvegarder sur Roblox” apparaît → clique dessus.
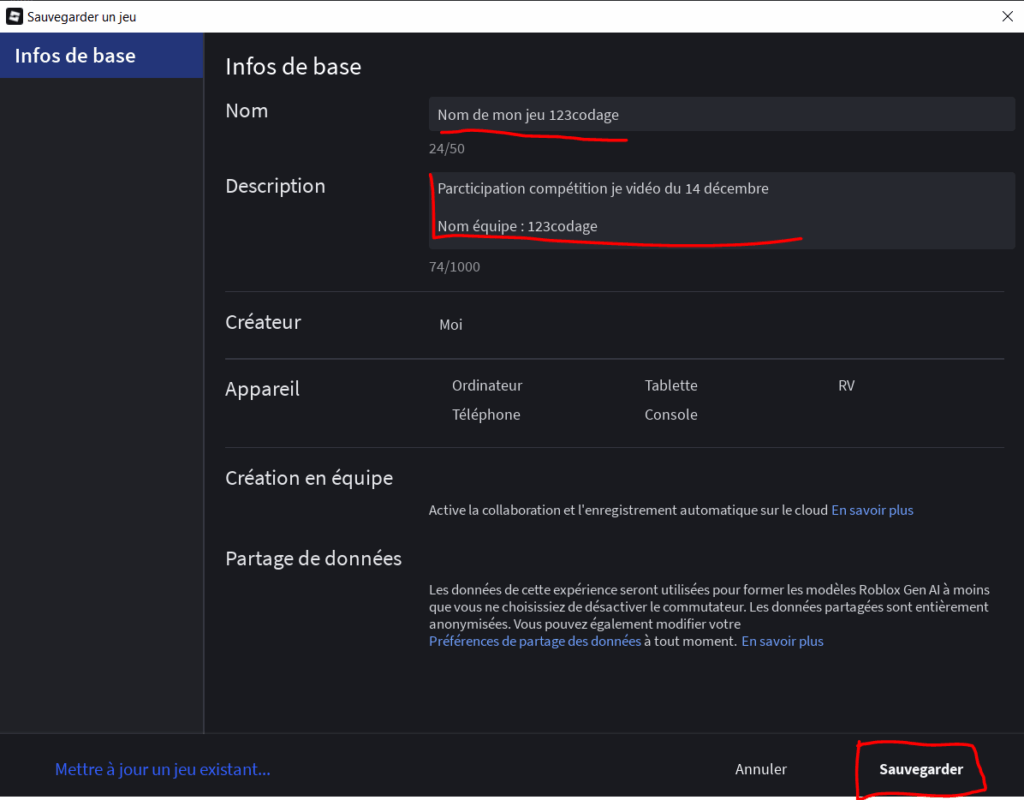
Donne un nom et une description au projet
Vous devez décider en groupe :
le nom du jeu,
une courte description (quel est le but du jeu ?).
Puis clique sur Sauvegarder.
Roblox studio se relance.
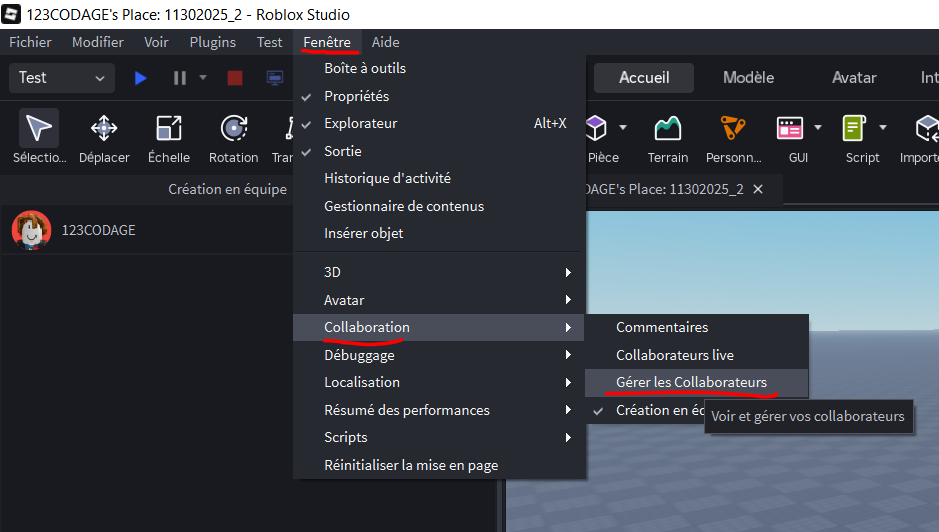
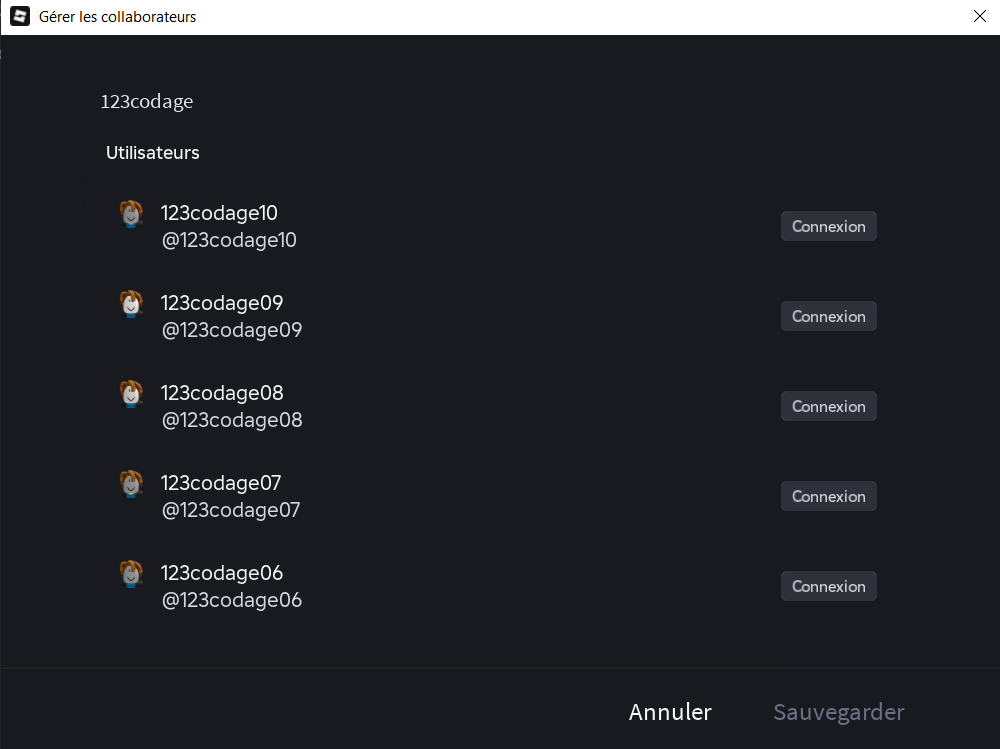
Ajoute les collaborateurs
Toujours dans : Fenêtre → Collaboration → Gérer les collaborateurs
Dans la zone de recherche, taper 123codage.
Sélectionner les comptes des membres de l’équipe (par exemple : 123codage01, 123codage05, etc.). → Le numéro du PC est marqué sur la tour.
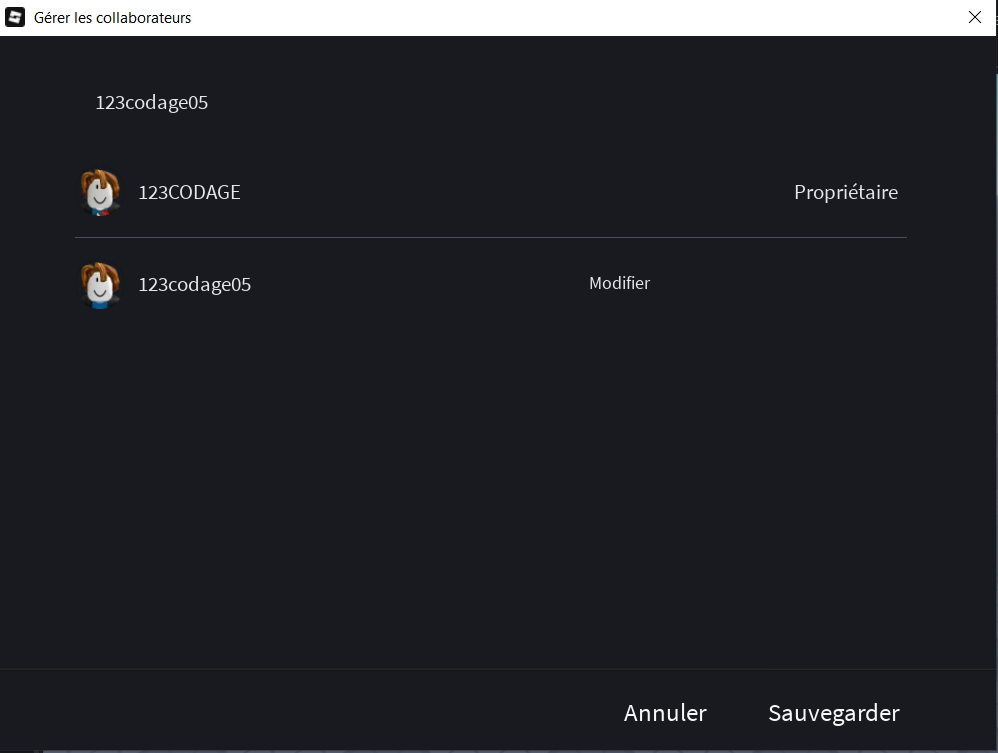
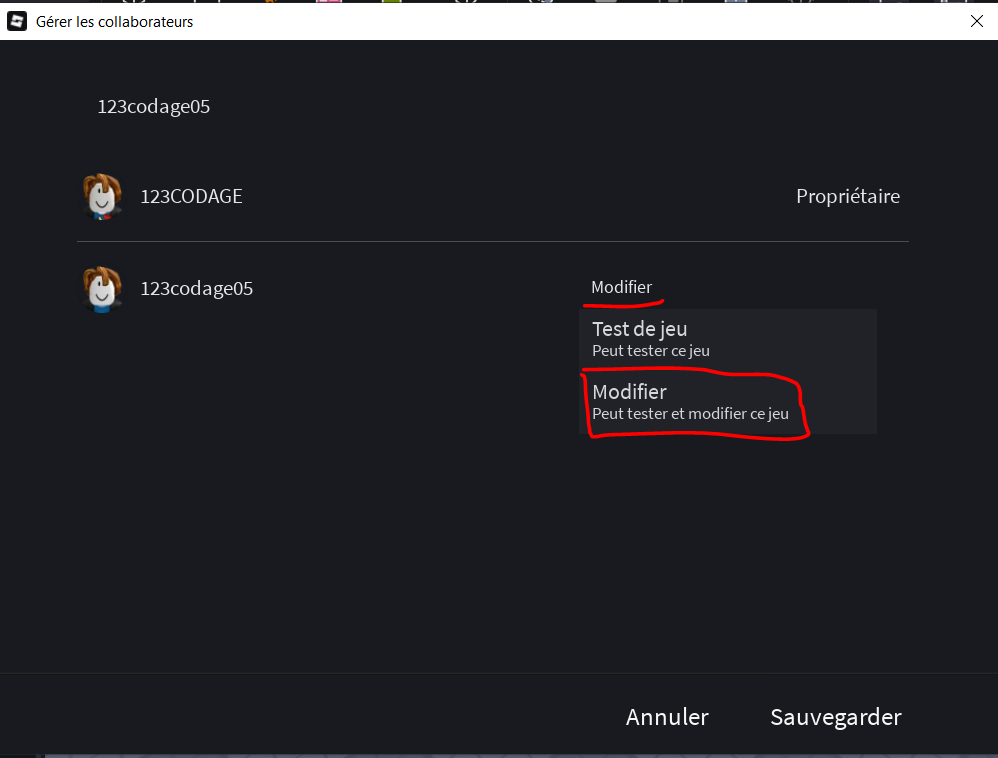
Pour chaque membre :
Modifier ses droits
Choisir Modifier (autorise à tester et modifier le jeu)
La première étape est terminée ! Tu viens de créer un projet partagé et tu as ajouté les membres de l’équipe.
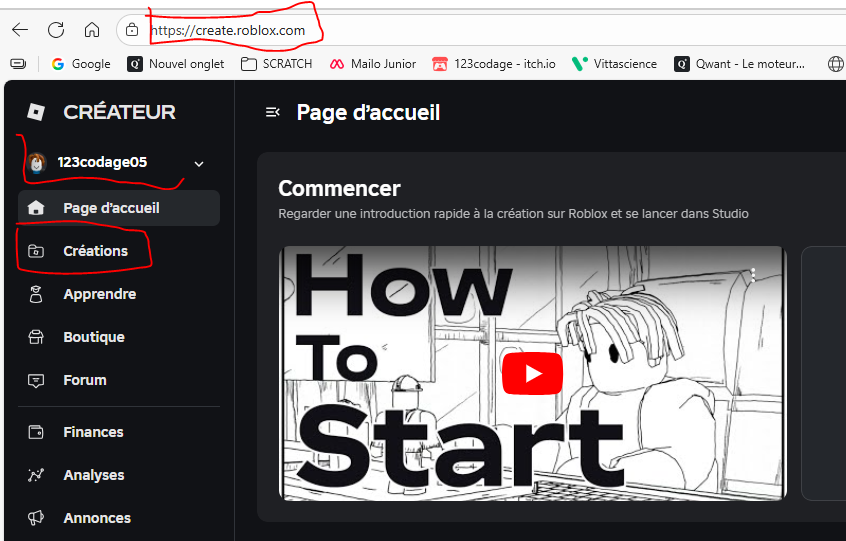
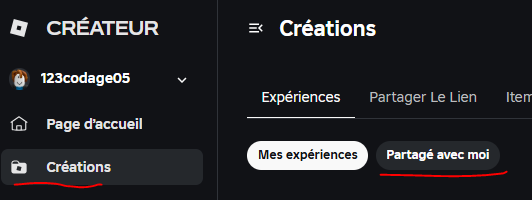
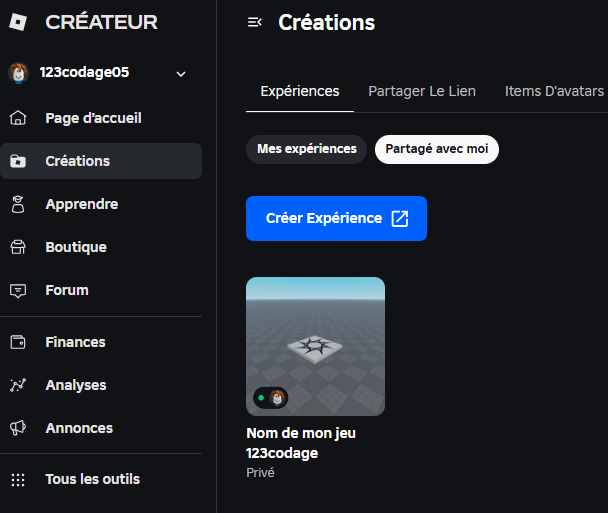
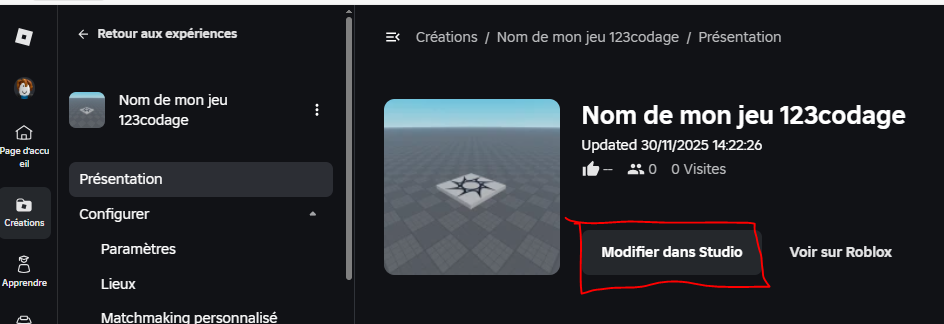
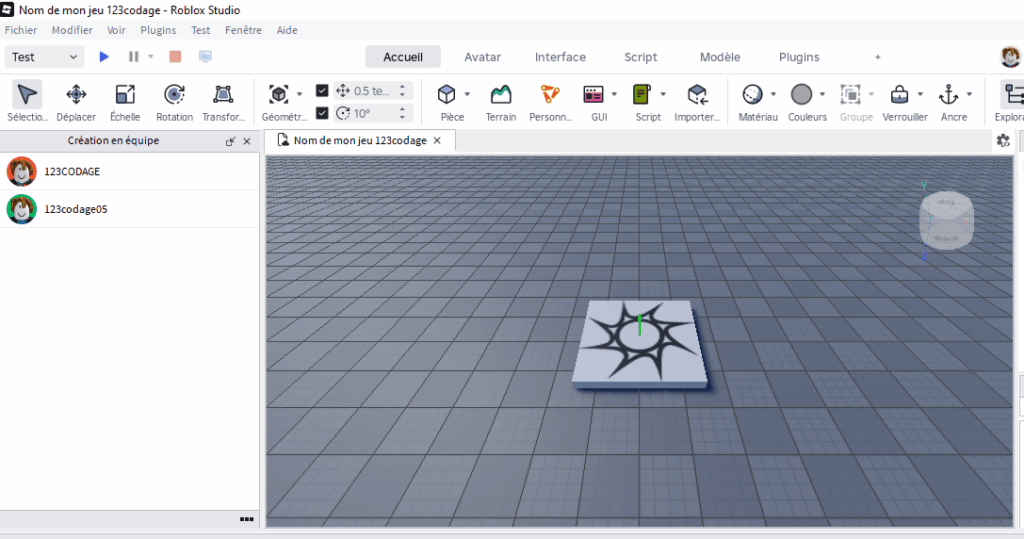
Étape 2 — Les autres membres ouvrent le projet partagé
Chaque membre de l’équipe doit maintenant accéder au projet :
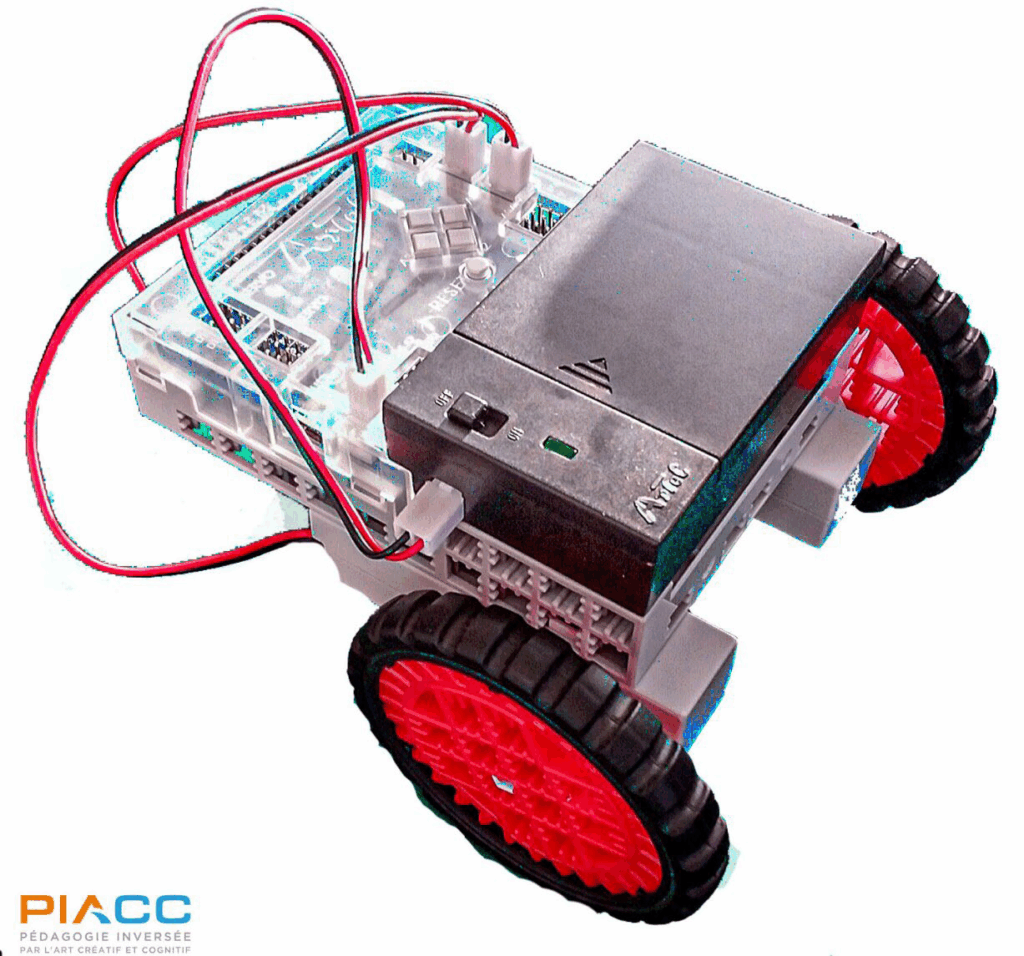
Tu apprendras à construire un véhicule en utilisant les moteurs CC et le programmer pour le déplacer.
A déplacer ton robot.
A utiliser les moteurs à courant continu.
Tu vas construire un robot véhicule autonome qui va avancer et reculer. Tu programmeras ton robot pour sauver des blessés et les emmener à l’hôpital.
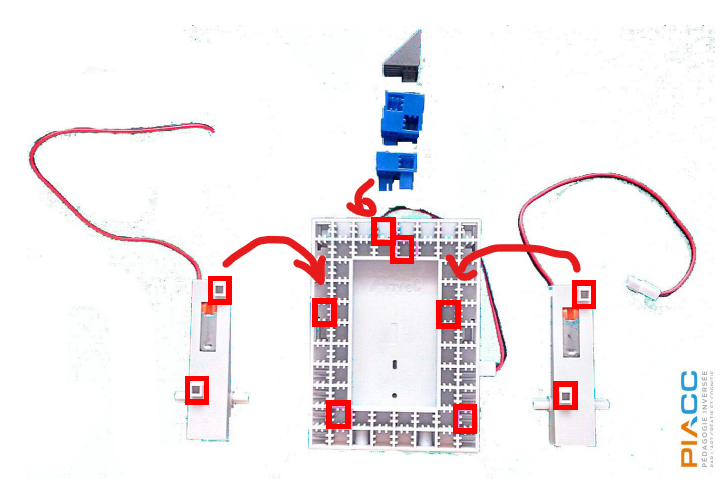
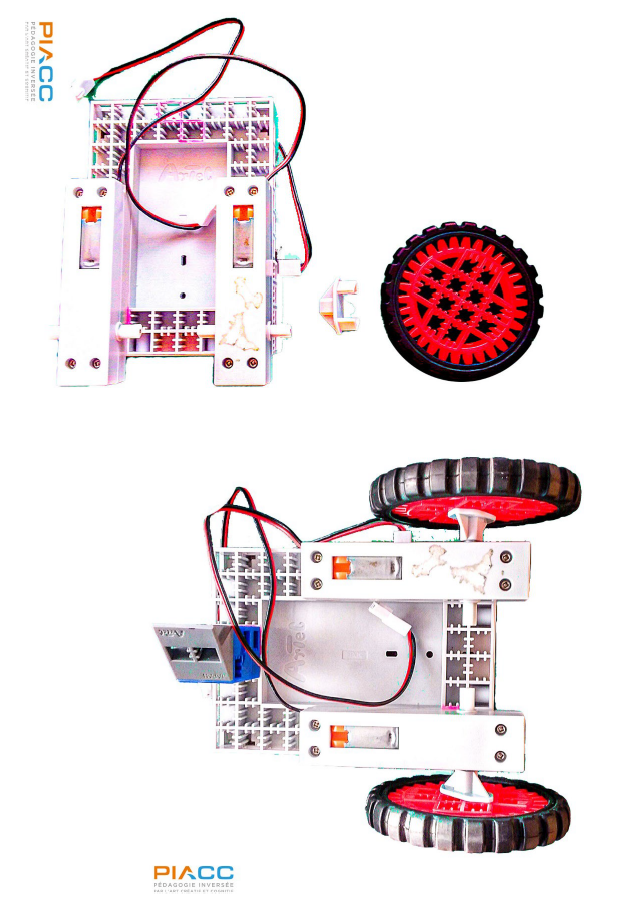
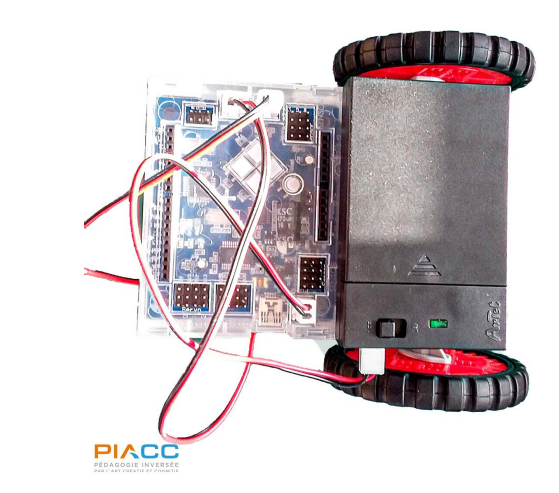
Construis ton robot :
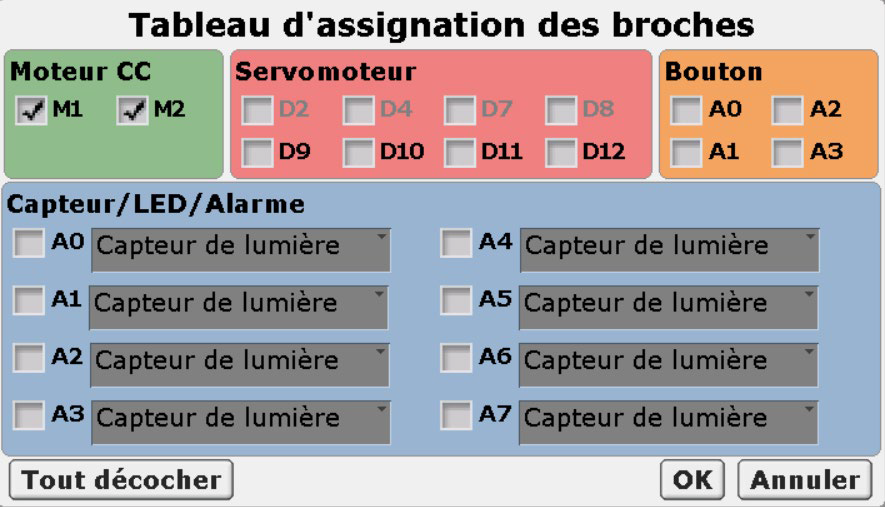
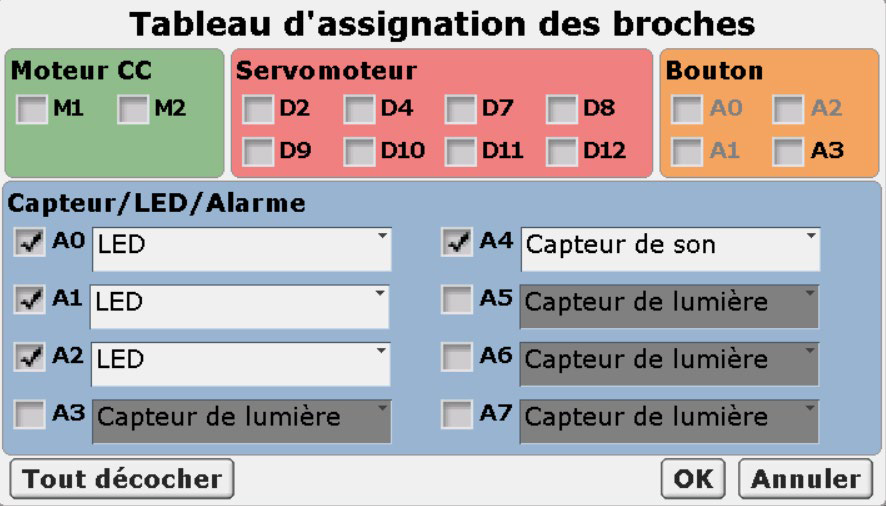
Le tableau des assignations
Clique sur le menu Edition en haut de l’écran et choisis Paramètres des ports. Clique ensuite sur le bouton Tout décocher . Puis indique tous les éléments que tu as rajoutés sur ton robot.
Valide tes modifications en cliquant sur le bouton OK
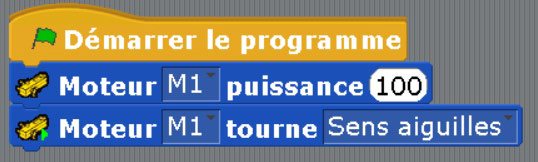
Programme le moteur à courant continu
Tu vas programmer les deux moteurs à courant continu pour déplacer ton véhicule.
Assemble ces blocs
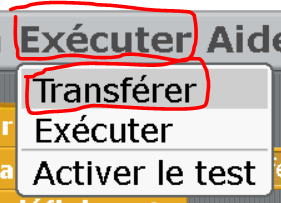
Puis clique sur le menu Exécuter en haut de l’écran et choisis Transférer Que constates-tu ? Comment se déplace ton véhicule ? Les deux roues tournent-elles ?
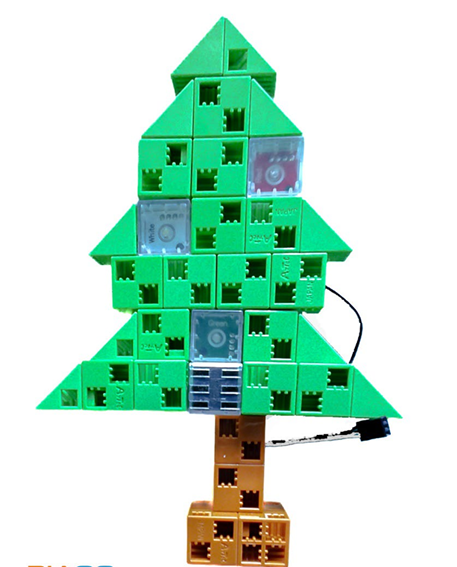
Concevoir un mini-projet : un « arbre de Noël » avec 3 LED qui s’allument au claquement de mains.
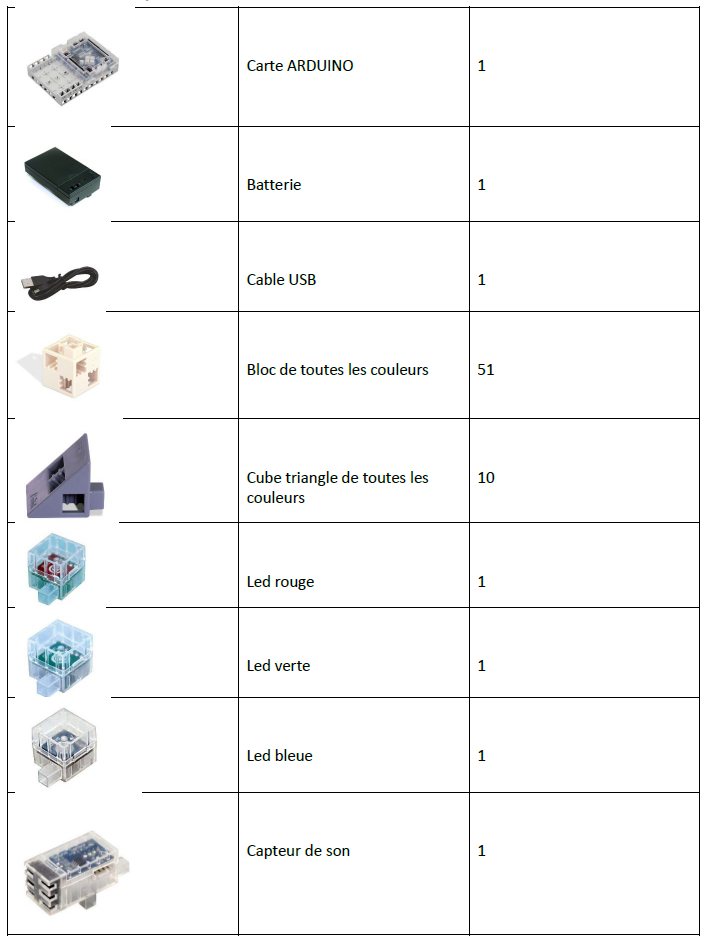
Liste du matériel
Etape 01 : Le tableau des assignations
Clique sur le menu Edition en haut de l’écran et choisis Paramètres des ports. Clique ensuite sur le bouton Tout décocher . Puis indique tous les éléments que tu as rajoutés sur ton robot.
Cable et valide tes modifications en cliquant sur le bouton OK Attention au positionnement du câble gris sur la carte ARDUINO !!!
Etape 02 : Crée des animations
Tu vas créer 5 animations :
Allume toutes les leds
Eteins toutes les leds
Allume la led0
Allume la led1
Allume la led2
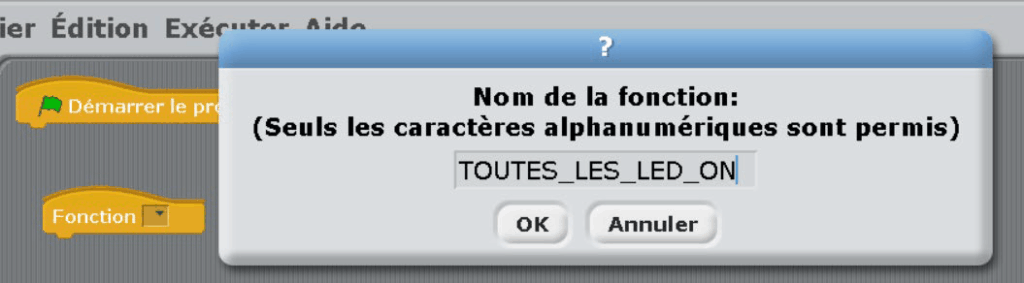
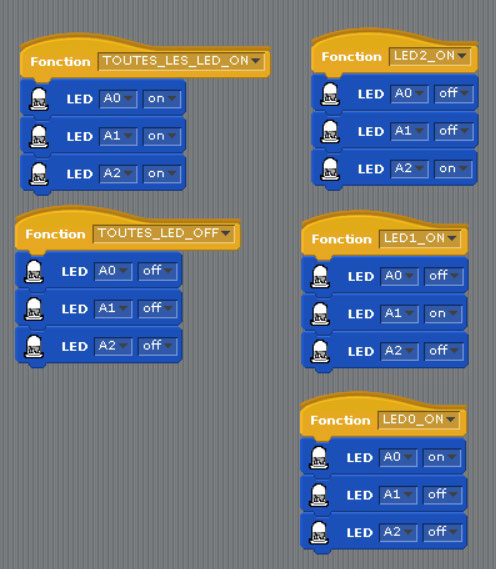
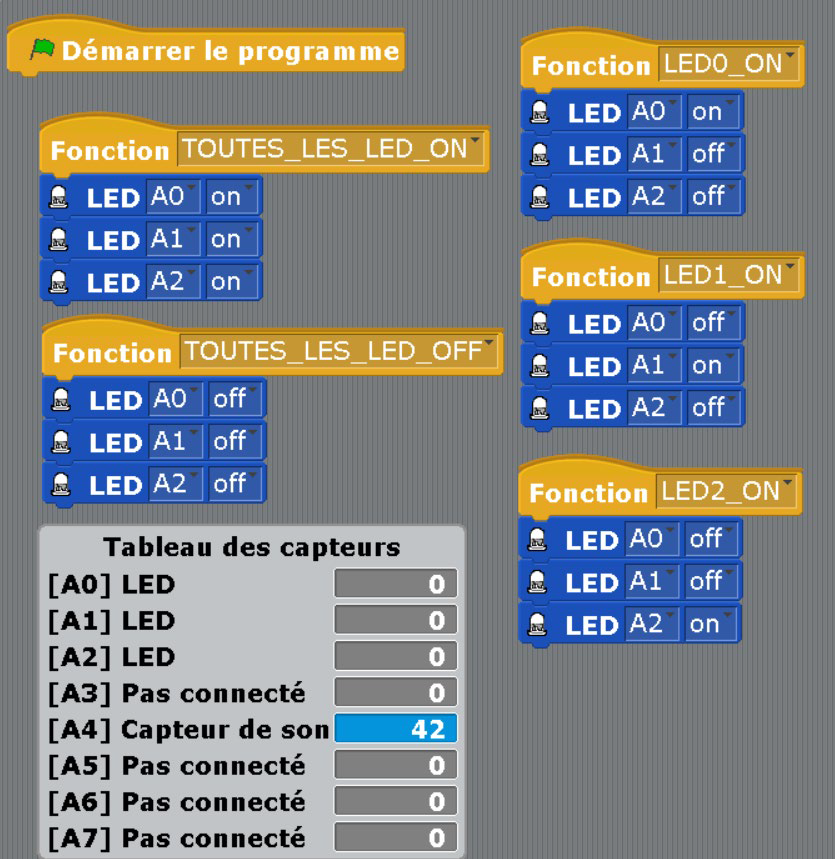
Pour cela tu vas créer 5 fonctions :
TOUTES_LES_LED_ON
TOUTES_LES_LED_OFF
LED0_ON
LED1_ON
LED2_ON
Code les 5 fonctions pour allumer ou éteindre les LEDs en choisissant « on » ou « off ».
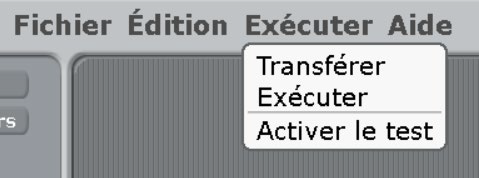
Puis testes le fonctionnement des fonctions en mode test :
Après l’affichage du tableau des capteurs clique sur l’étiquette de chaque « Fonction » pour tester l’animation des diffréntes LEDs. Clique sur « Exécuter » puis sur « Activer le test »
Tu animes ton arbre de Noël en cliquant sur chaque fonction.
Etape 02 : Teste le chronomètre
Ta mission : Maintenant, automatises l’animation pour ne plus avoir besoin de cliquer sur chaque animation. Code les animations pour qu’elles se succédent indéfiniment.
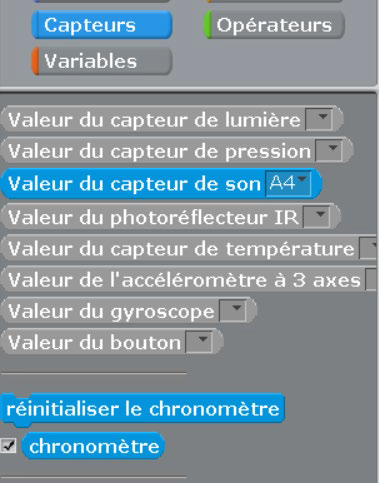
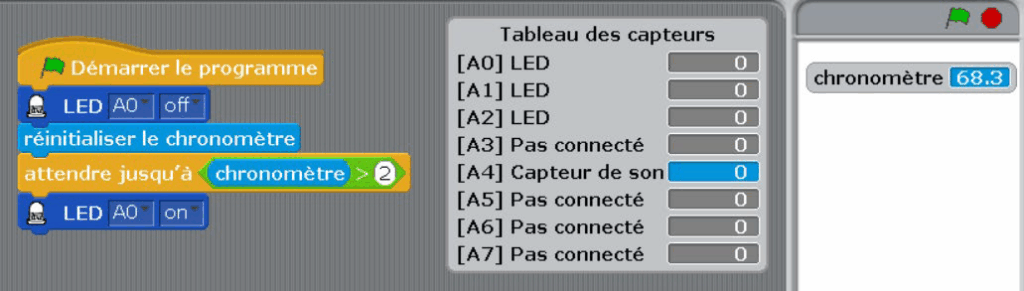
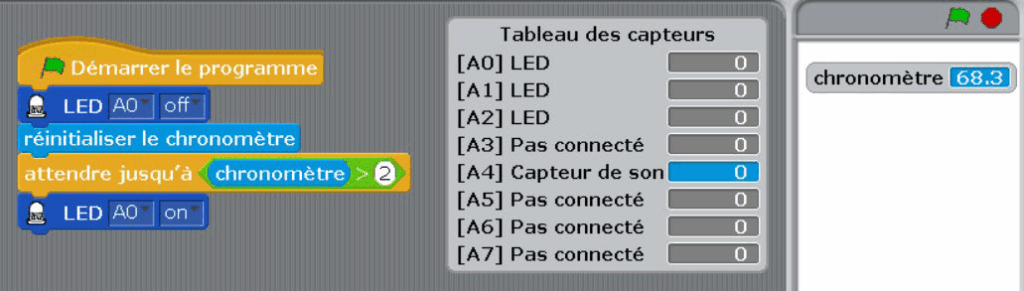
Une solution Automatise ton spectacle d’animation lumineux en utilisant le « chronomètre » pour cadencer ton animation. Teste le fonctionnement du « chronomètre ». Dans « Capteurs », coche l’affichage de « chronomètre ».
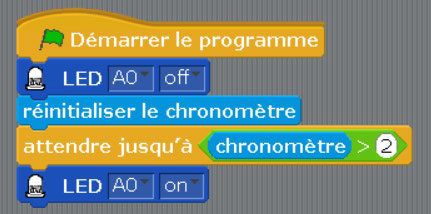
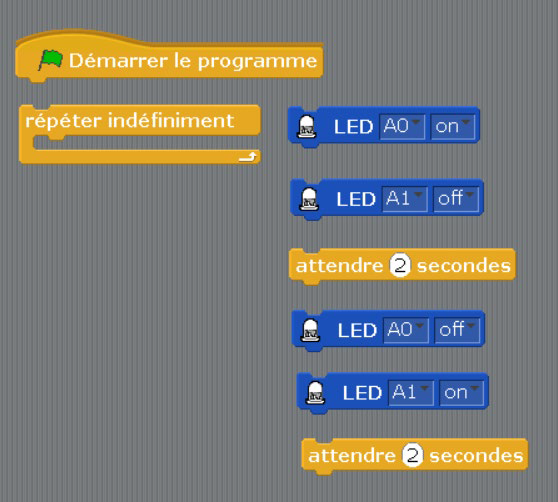
Utilise le « chronomètre » pour allumer ta LED au bout de 2 secondes.
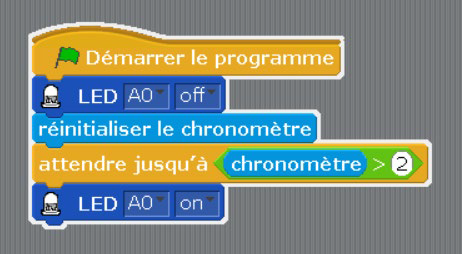
Agence ces instructions sous « démarrer le programme « Clique sur « Exécuter » puis sur « Activer le test »
Clique sur le drapeau vert en haut à droite de l’écran pour lancer l’exécution de ton programme.
Un bord blanc apparaît pour indiquer que le programme s’exécute. Que constates-tu ? Le chronomètre evolue-t-il ? La LED s’allume-t-elle ? Le bord blanc disparait-il ?
La LED s’allume et le bord blanc disparaît au bout de 2 secondes.
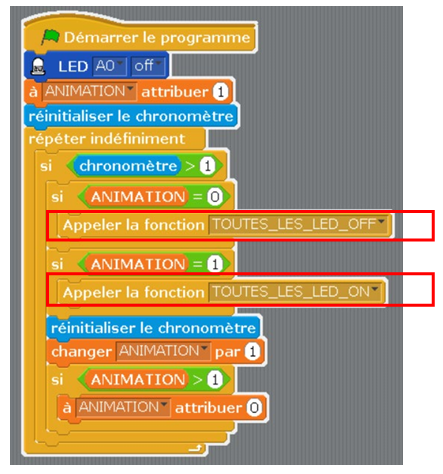
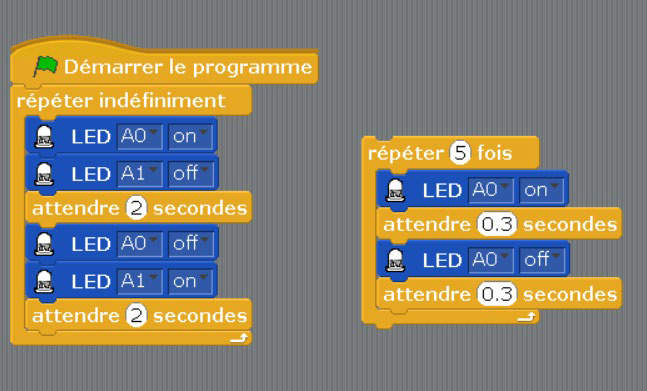
Etape 03 : Automatise tes animations
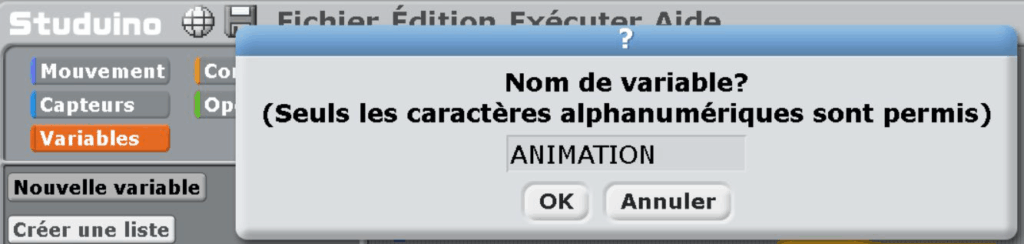
Ta mission : Fais clignoter ta LED toutes les secondes. Pour cela, crée une variable « ANIMATION ». Elle prendra les valeurs suivantes :
0 éteinte
1 allumée
Toutes les secondes la variable ANIMATION passe de la valeur 0 à 1, la LED s’allume et s’éteint ainsi toutes les secondes.
Clique sur le menu Exécuter en haut de l’écran puis choisis Transférer
Utilise les animations que tu avais crées pour utiliser plusieurs LEDs :
Clique sur le menu Exécuter en haut de l’écran puis choisis Transférer
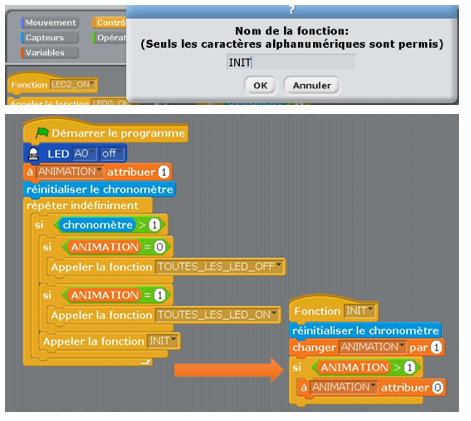
Tu peux améliorer ton code pour le rendre plus lisible :
Crée une fonction INIT pour regrouper les instructions au lancement de ton programme :
Ton code est ainsi plus facile à comprendre.
Clique sur le menu Exécuter en haut de l’écran puis choisis Transférer
Etape 04 : Encore plus d’animations
Continue à améliorer ton animation des LEDs. Allume les trois LEDs, puis la LED0, puis la LED1, puis la LED2.
Tu peux inventer autant d’animations que tu souhaites. A toi d’être imaginatif, tu peux faire varier la variable ANIMATION à plus de 4 animations. A toi de trouver les animations et de faire attention à modifier dans la fonction INIT le nombre maximum d’animation.
Code tes animations puis clique sur le menu Exécuter en haut de l’écran puis choisis Transférer
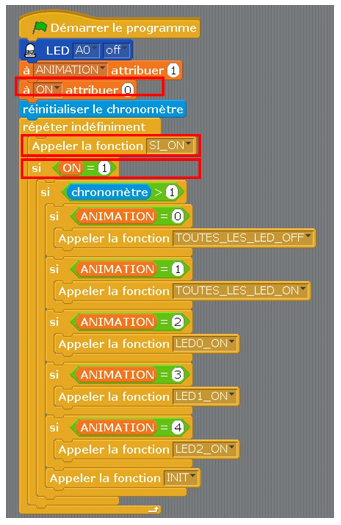
Etape 05 : Commande tes animations d’un clap de main
Code pour que ton spectacle se lance par un clap des mains puis s’arrête par un nouveau clap des mains. Le son de ton clap de main dure un certain temps. Les instructions suivantes te permettent de détecter un son puis de détecter quand le son se termine :
Il est important d’attendre que le son du claquement de mains soit terminé. Sinon, ton programme risque de détecter un nouveau claquement alors que le premier n’est pas encore fini !
À chaque claquement de mains, ton robot allume ou éteint les LED.
Maintenant programme pour que sur un clap des mains le spectacle de lumière se lance puis tu peux l’arrêter par un nouveau clap des mains. Ton spectacle doit être magnifique, faire clignoter toutes les LEDs en même temps, les faire clignoter successivement …
Crée une variable « ON » qui va mémoriser l’état de ton animation :
1 en fonctionnement
0 éteinte
Puis une fonction qui teste le microphone pour allumer ou éteindre l’animation :
Insère ta fonction « SI_ON » dans le code principal et conditionne le lancement de ton animation en fonction de la variable « ON ».
Clique sur le menu Exécuter en haut de l’écran puis choisis Transférer
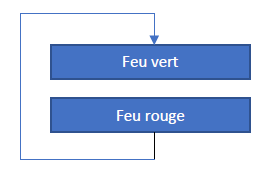
Tu vas construire et programmer un feu de circulation nouvelle génération ! Ta mission : aider le gouvernement à simplifier les feux pour réduire la consommation d’énergie tout en assurant la sécurité de tous les usagers.
🚦 Ce que tu vas apprendre
À monter un circuit avec 4 LEDs, un capteur de pression et une alarme sonore.
À programmer un feu de circulation en gérant le temps et les conditions de passage.
À utiliser des notions essentielles en programmation :
VARIABLES : pour mémoriser des informations (ex. : état du feu).
FONCTIONS : pour rendre ton code plus clair et plus facile à modifier.
À faire des choix logiques pour assurer la sécurité des piétons et des véhicules.
🕹️ Découvrir le rôle des couleurs
Couleur
Signification
Action attendue
🟢 Vert
Passage autorisé
Les voitures roulent
🟡 Orange
Attention, changement
Prépare à s’arrêter
🔴 Rouge
Passage interdit
Les voitures s’arrêtent
Mais… ton défi est de supprimer une couleur ! Tu devras donc imaginer une nouvelle logique à deux couleurs :
🧠 Ta mission
Le gouvernement français souhaite réaliser des économies d’énergie. Tu dois créer un feu bicolore intelligent (vert + rouge) capable de :
Réguler la circulation des véhicules.
Avertir avant le passage au rouge grâce au clignotement.
Laisser passer les piétons avec un capteur de pression (bouton).
Activer une alarme quand un piéton peut traverser.
🧩 Matériel nécessaire
1 carte microcontrôleur
4 LEDs (rouge, verte)
1 capteur de pression ou bouton poussoir
1 buzzer ou alarme sonore
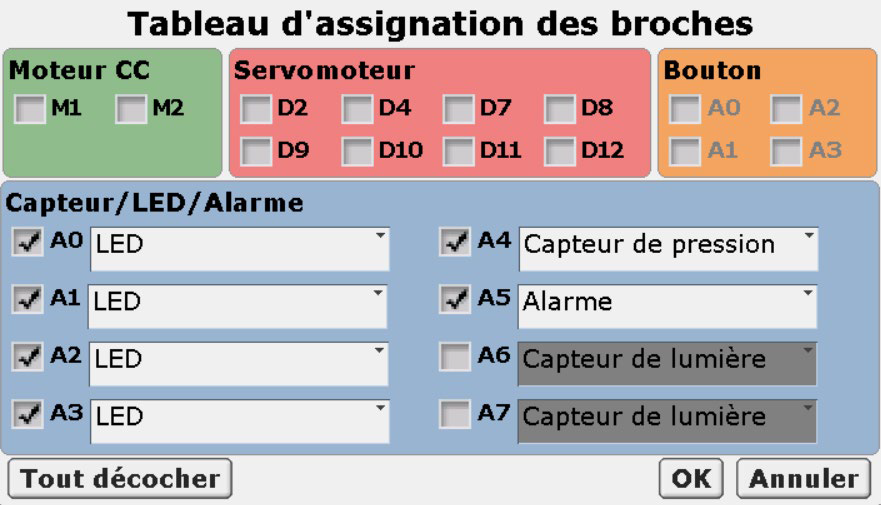
Clique sur le menu Edition en haut de l’écran et choisis Paramètres des ports. Clique ensuite sur le bouton Tout décocher . Puis indique tous les éléments que tu as rajoutés sur ton robot.
LED A0 Vert pour véhicule
LED A1 Rouge pour véhicule
LED A2 Vert pour piéton
LED A3 Rouge pour piéton
Cable et valide tes modifications en cliquant sur le bouton OK
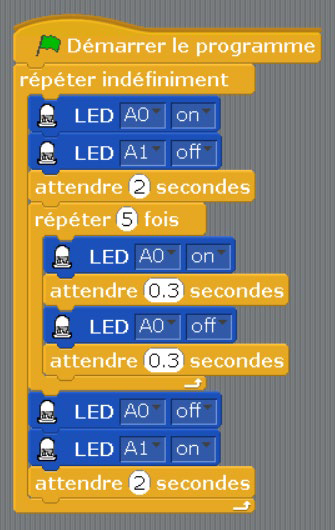
Etape 01 : gère le passage des véhicules
Dans un premier temps, tu devras allumer la LED verte pour avertir les automobilistes qu’ils peuvent passer, puis, après un certain délai, allumer la LED rouge pour interdire le passage des véhicules.
Assemble les blocs puis clique sur le menu Exécuter en haut de l’écran et choisis Transférer
Etape 03 : Faire clignoter pour avertir
Tu devras faire clignoter la LED verte pour avertir les automobilistes que le feu va passer au rouge et qu’ils doivent se préparer à arrêter leur véhicule.
Assemble les blocs puis clique sur le menu Exécuter en haut de l’écran et choisis Transférer.
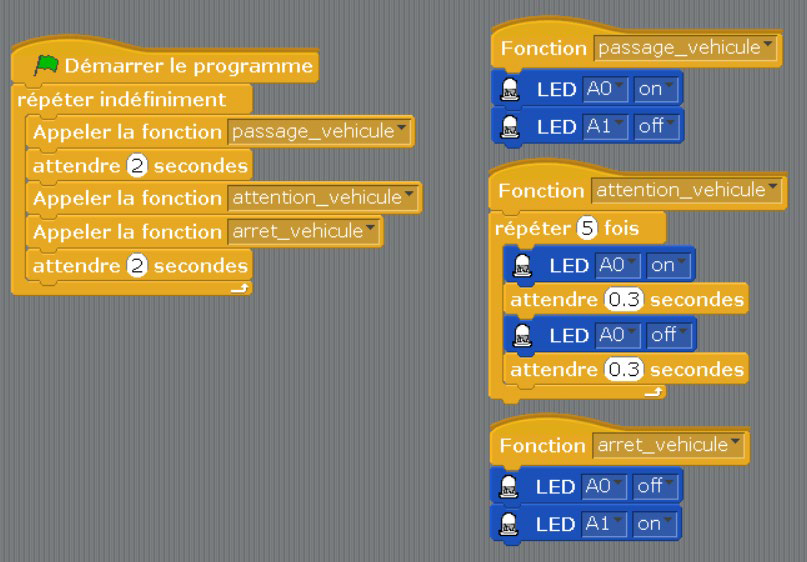
Etape 04 : Amélioration de ton code
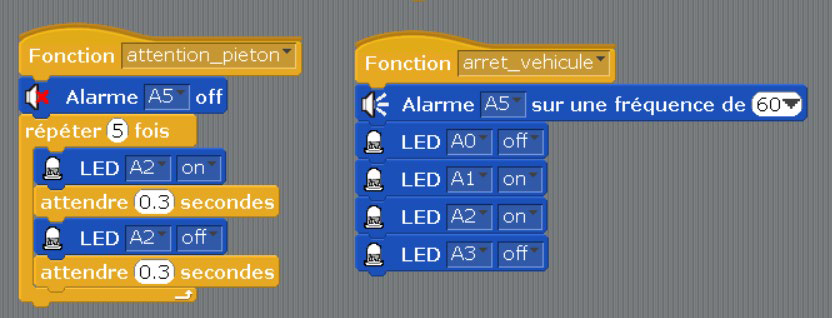
En utilisant des fonctions, tu vas réorganiser ton code pour le rendre plus lisible et faciliter son évolution..
Assemble les blocs puis clique sur le menu Exécuter en haut de l’écran et choisis Transférer
Les fonctions permettent de regrouper plusieurs blocs qui réalisent une même action (par exemple : « attention_vehicule »). Elles évitent de répéter le même code plusieurs fois, ce qui rend le programme plus court et plus clair. Elles facilitent la lecture du programme, car chaque fonction porte un nom qui décrit son rôle. Elles rendent le code plus facile à modifier ou à corriger, car une seule modification dans la fonction s’applique partout. Enfin, elles aident à mieux organiser sa pensée comme un vrai programmeur, en découpant le problème en petites étapes logiques.
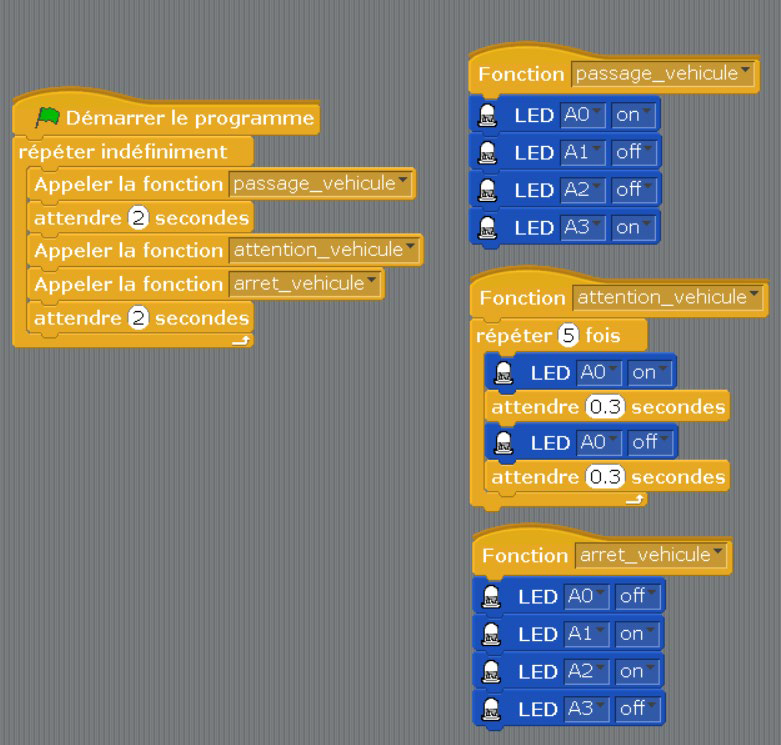
Etape 05 : Gérer le passage pieton
Tu vas gérer les LEDs verte et rouge du piéton en fonction de celles du passage des véhicules.
Tu vas gérer le passage piéton :
quand les véhicules ont l’autorisation de passer, le piéton doit attendre ;
quand les véhicules sont à l’arrêt, le piéton peut traverser.
Clique sur le menu Exécuter en haut de l’écran et choisis Transférer
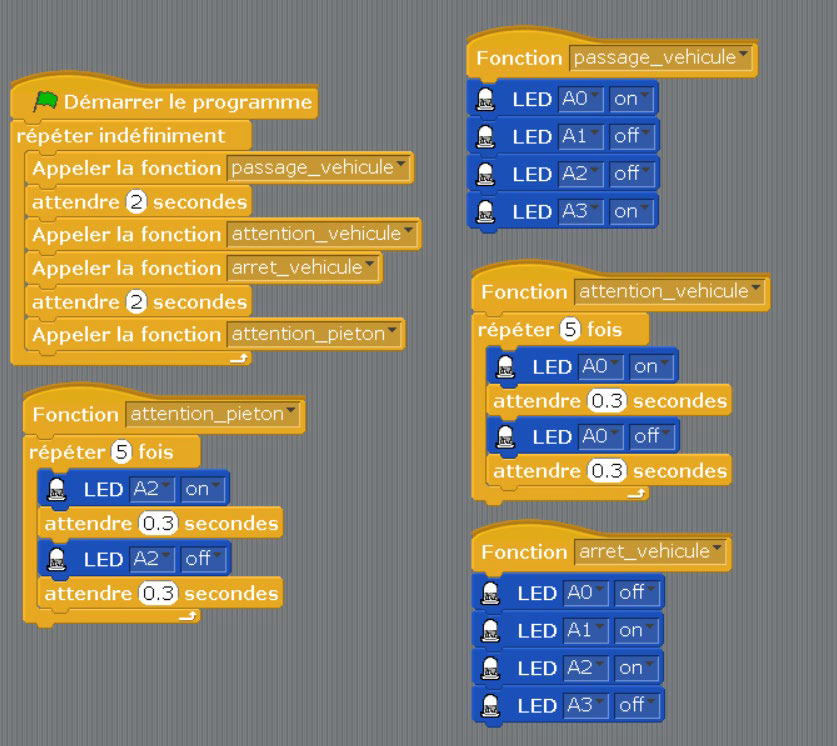
Etape 06 : Faire clignoter pour avertir le piéton
Tu vas faire clignoter la LED verte du piéton pour l’avertir que le feu va bientôt passer au rouge.
Clique sur le menu Exécuter en haut de l’écran et choisis Transférer
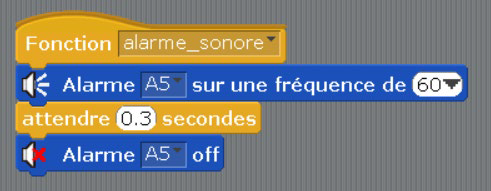
Etape 07 : Avertissement sonore pour les piétons non-voyants
Tu vas déclencher le buzzer lorsque les piétons peuvent passer pour avertir les personnes non-voyantes.
Clique sur le menu Exécuter en haut de l’écran et choisis Transférer
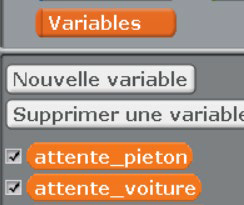
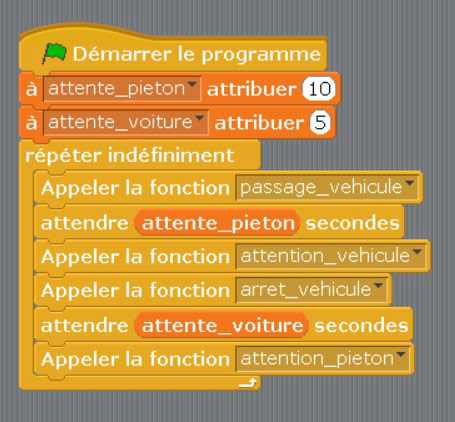
Etape 08 : Gérer les temps d’attentes
Nous allons utiliser des variables pour fixer des temps d’attente différents : un pour les conducteurs et un autre pour les piétons.
Clique sur le menu Exécuter en haut de l’écran et choisis Transférer
Les variables sont comme des boîtes dans lesquelles on peut ranger des informations (par exemple un nombre, le temps d’attente en seconde). Elles permettent au programme de mémoriser des données et de s’en servir plus tard. Grâce aux variables, ton programme peut changer de comportement selon la situation (par exemple, attendre plus ou moins longtemps). Elles rendent le code plus facile à comprendre et à modifier, car il suffit de changer la valeur d’une variable pour tout adapter. En résumé, les variables servent à donner de la mémoire et de la souplesse à ton programme.
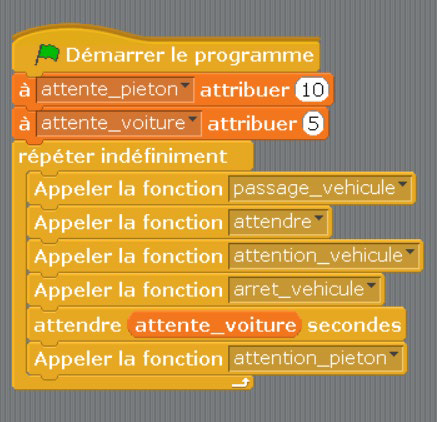
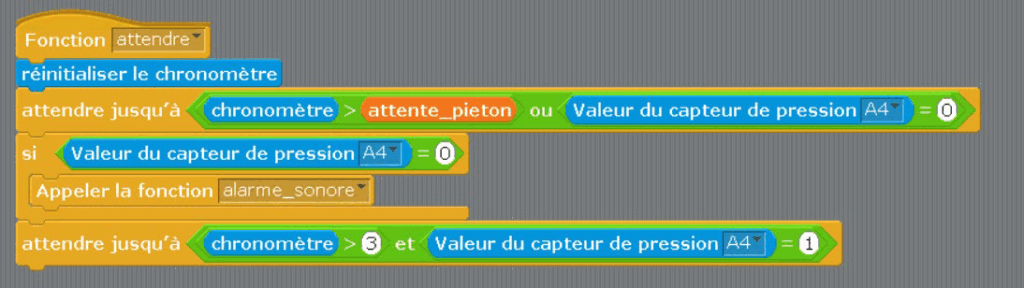
Etape 09 : Gérer une demande d’un piéton
Pendant la phase d’attente, le piéton pourra demander l’arrêt des véhicules pour traverser en toute sécurité. Le piéton devra appuyer sur le capteur de pression pour obtenir l’autorisation de passer.
La demande du piéton sera traitée pendant sa phase d’attente au feu rouge. Tu utiliseras un chronomètre pour compter le temps d’attente du piéton tout en vérifiant si le capteur de pression est activé. Si le piéton appuie sur le capteur, sa valeur sera égale à zéro. Tu laisseras ensuite un petit temps supplémentaire pour que les voitures puissent encore passer avant que le feu piéton ne devienne vert.
Clique sur le menu Exécuter en haut de l’écran et choisis Transférer
GERTRUDE
Un exemple de service de la gestion de la circulation
Gertrude Saem a été créée en 1981 par la Communauté Urbaine de Bordeaux avec l’objectif de développer un système d’avant-garde pour améliorer ou résoudre les problèmes de circulation, de transport publics, de contrôle et de diminution de la pollution véhiculaire et de sécurité dans la ville. Le principe est de minimiser les temps d’attente en synchronisant les feux sur les grands axes, en fonction du trafic. Des installations comptent les véhicules ou les longueurs des files d’attente (boucles magnétiques implantées dans la chaussée, aux carrefours et sur les axes), et le tout est centralisé à un poste de commande, qui régule informatiquement les feux de la ville ou de l’agglomération et fluidifie ainsi le trafic.
GERTRUDE EN FRANCE Antibes, Bordeaux, Brive, Caen, Dax, Dunkerque, Fort-de-France, Le Mans, Marseille, Metz, Mimizan, Mont de Marsan, Montpellier, Nîmes, Reims, Troyes, Saint-Vincent-de-Tyrosse, SDEC du Calvados.
UN SAVOIR-FAIRE ET DES SOLUTIONS QUI S’EXPORTENT DANS LE MONDE Algérie (Alger), Argentine (Posadas), Chine (Pékin), Egypte (Le Caire), Maroc (Casablanca), Mexique (Monterrey, Morelia), Paraguay (Asuncion), Pologne (Wroclaw), Portugal (Lisbonne, Porto).
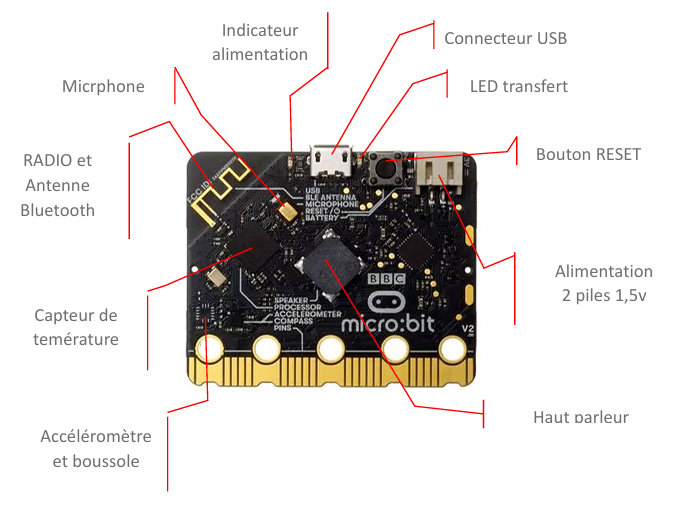
Tu as déjà appris les bases de Python et tu veux aller plus loin ? Avec la micro:bit, tu vas coder des jeux, des calculatrices, des capteurs, et bien plus encore. Tu vas manipuler des boucles, des fonctions, des événements, et même des conversions de bases (binaire, hexadécimal, etc.) — des compétences utiles pour le lycée, les études, et même dans le monde professionnel. La micro:bit interagit avec le monde réel grâce à ses boutons, ses capteurs et son écran LED. Tu pourras voir le résultat de ton code en temps réel !
Partie 01 : Découverte des tables en Python
Apprendre à utiliser et manipuler des tables (ou listes) en Python, en affichant une séquence de chiffres ou d’images sur l’écran de la micro:bit.
Une table en Python s’écrit entre crochets : [ ].
Les éléments sont séparés par des virgules.
Pour afficher une image, utilise Image.NOM_DE_L_IMAGE (ex : Image.SMILE).
from microbit import *
while True:
all_images = [str(1), str(2), str(3)]
display.show(all_images, delay=300)
Modifie le programme suivant pour qu’il affiche, dans l’ordre, les chiffres de 1 à 5 sur l’écran de la micro:bit, avec un délai de 300 ms entre chaque chiffre.
Comprendre la table all_images Actuellement, la table all_images contient les chaînes de caractères "1", "2" et "3". Question : Comment faire pour qu’elle contienne les chiffres de 1 à 5 ?
Modifier la table Ajoute les chiffres manquants ("4" et "5") dans la table all_images.
Tester le programme Télécharge ton programme sur la micro:bit et vérifie que les chiffres défilent bien de 1 à 5.
Personnalisation (défis bonus !)
Défi 1 : Fais défiler les chiffres de 5 à 1.
Défi 2 : Crée ta propre table avec des motifs ou des lettres (ex : "A", "B", "C").
Défi 3 : Remplace les chiffres par des images (ex : Image.HAPPY, Image.SAD, Image.HEART).
Partie 02 : Chronomètre avec la micro:bit – booléens et gestion du temps
Découvrir le fonctionnement d’une variable booléenne (True/False) et la gestion du temps en Python, en créant un chronomètre qui se lance et s’arrête quand on touche le logo de la micro:bit
from microbit import *
import time
start = 0
triggered = False
while True:
if pin_logo.is_touched():
triggered = not triggered
while pin_logo.is_touched():
start = time.ticks_ms()
else:
if triggered :
display.scroll(int((time.ticks_ms() - start)/1000))
else:
display.show(Image.HEART)
Comprendre la variable booléenne triggered
triggered vaut False au début : le chronomètre est arrêté.
Quand on touche le logo, triggered devient True (chronomètre lancé), et redevient False si on retouche le logo (chronomètre arrêté).
Question : Que fait l’instruction triggered = not triggered ?
Lancer et arrêter le chronomètre
Si triggered est True, le chronomètre doit compter les secondes.
Si triggered est False, le chronomètre doit s’arrêter.
Afficher le temps écoulé
Utilise time.ticks_ms() pour mesurer le temps en millisecondes.
Convertis ce temps en secondes et affiche-le sur l’écran.
Tester le programme
Télécharge ton programme sur la micro:bit.
Vérifie que le chronomètre se lance et s’arrête bien en touchant le logo.
Chronomètre lancé :
Défis bonus
Défi 1 : Ajoute un bouton pour remettre le chronomètre à zéro.
Défi 2 : Lance une musique toutes les secondes.
Défi 3 : Lance une musique toutes les 10 secondes.
from microbit import *
import time
import music
start = 0
triggered = False
while True:
if pin_logo.is_touched():
triggered = not triggered
while pin_logo.is_touched():
start = time.ticks_ms()
elif button_a.is_pressed():
while button_a.is_pressed() :
start = time.ticks_ms()
else:
if triggered :
duration = int((time.ticks_ms() - start)/1000)
music.pitch(200, 50)
if (duration % 10) == 0:
music.pitch(300, 80)
display.scroll(duration)
else:
display.show(Image.HEART)
Partie 01 : Convertisseur décimal
Consigne : Écrire un programme Python qui demande à l’utilisateur de saisir un nombre entier décimal, puis affiche sa représentation en base dans une base de 2 à 36.
Exemple : Pour une conversion en base 16 (hexadécimal), si l’utilisateur saisit 10, le programme doit afficher E.
Indices pour réussir l’exercice
Comprendre par exemple pour la base 16 : En hexadécimal, on utilise les chiffres de 0 à 9 et les lettres A à F pour représenter les valeurs de 10 à 15.
Méthode de conversion : Pour convertir un nombre décimal en hexadécimal, on divise successivement le nombre par 16 et on garde le reste de chaque division.
Utilisation des restes : Chaque reste correspond à un chiffre hexadécimal, mais il faut les lire à l’envers à la fin.
Gestion des lettres : Si un reste est égal à 10, 11, 12, 13, 14 ou 15, il faut le remplacer par A, B, C, D, E ou F.
Exemple de programme :
from microbit import display, Image, button_a, pin_logo
# base donnée (2 ≤ base ≤ 36)
digits = "0123456789ABCDEFGHIJKLMNOPQRSTUVWXYZ"
base = 16
def decimal_to_base_n(decimal_num, base):
"""
Convertit un nombre décimal (int) dans une base donnée (2 ≤ base ≤ 36).
Retourne une chaîne représentant le nombre dans la base souhaitée.
"""
if base < 2 or base > 36:
raise ValueError("La base doit être comprise entre 2 et 36.")
result = []
if decimal_num == 0:
return "0"
decimal_num = abs(decimal_num)
while decimal_num > 0:
# Obtenir le reste de la division entière du nombre par la base
remainder = decimal_num % base
result.append(digits[remainder])
decimal_num = decimal_num // base
return ''.join(reversed(result))
# Addition de deux nombres
i = 0
display.show(Image.PACMAN)
while True:
# Résultat de l'addition
if pin_logo.is_touched():
display.show("=" + decimal_to_base_n(i, base))
i = 0
while pin_logo.is_touched():
pass
# Choix d'un nombre avec le bouton A
elif button_a.is_pressed():
i = i+1
display.show(str(i))
while button_a.is_pressed() :
pass
Choisis avec le bouton A le chiffre 10 :
Convertis le chiffre 10 en décimal en base 16 avec la zone sensitive :
Partie 02 : Calculette de programmeur
Tu vas programmer une micro:bit pour qu’elle fonctionne comme une calculette permettant d’additionner deux nombres dans une base choisie (entre 2 et 36). Par exemple, si la base est 16, tu pourras additionner deux chiffres hexadécimaux (comme A + 5 = F).
Consignes
Reprend la Fonction de conversion de l’exercice précédent decimal_to_base_n(decimal_num, base) qui convertit un nombre décimal en une chaîne de caractères représentant ce nombre dans la base choisie.
Exemple : decimal_to_base_n(15, 16) doit retourner "F".
Choix de la base La variable base est déjà initialisée à 16, mais tu pourras la changer pour tester d’autres bases (entre 2 et 36).
Sélection des nombres
Appuie sur le bouton A pour incrémenter le premier nombre (i) et l’afficher.
Appuie sur le bouton B pour incrémenter le deuxième nombre (j) et l’afficher.
Les nombres doivent rester inférieurs à la base choisie.
Affichage du résultat
Touche le logo de la micro:bit pour afficher le résultat de l’addition i + j dans la base choisie, sous la forme =X (où X est le résultat de l’addition de i + J).
Réinitialisation Après chaque calcul, les nombres i et j doivent être remis à zéro.
from microbit import display, Image, button_a, button_b, pin_logo
# base donnée (2 ≤ base ≤ 36)
digits = "0123456789ABCDEFGHIJKLMNOPQRSTUVWXYZ"
base = 16
def decimal_to_base_n(decimal_num, base):
"""
Convertit un nombre décimal (int) dans une base donnée (2 ≤ base ≤ 36).
Retourne une chaîne représentant le nombre dans la base souhaitée.
"""
if base < 2 or base > 36:
raise ValueError("La base doit être comprise entre 2 et 36.")
result = []
if decimal_num == 0:
return "0"
decimal_num = abs(decimal_num)
while decimal_num > 0:
# Obtenir le reste de la division entière du nombre par la base
remainder = decimal_num % base
result.append(digits[remainder])
decimal_num = decimal_num // base
return ''.join(reversed(result))
# Addition de deux nombres
i = 0
j = 0
display.show(Image.PACMAN)
while True:
# Résultat de l'addition
if pin_logo.is_touched():
display.show("=" + decimal_to_base_n(i+j, base))
i, j = 0, 0
while pin_logo.is_touched():
pass
# Choix d'un nombre avec le bouton A
elif button_a.is_pressed():
i = i+1 if i < base-1 else 0
display.show(digits[i])
while button_a.is_pressed() :
pass
# Choix du deuxième nombre par la touche B
elif button_b.is_pressed():
j = j+1 if j < base-1 else 0
display.show(digits[j])
while button_b.is_pressed() :
pass
Choix du premier nombre par la touche A :
Choix du deuxième nombre par la touche B :
Demande le résultat de la somme par la zone sensitive :
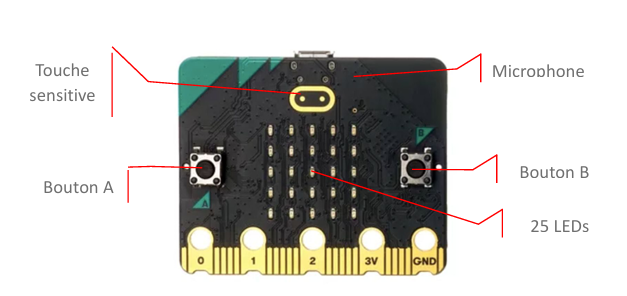
Bienvenue dans ce livret qui va te permettre de découvrir le monde passionnant de la programmation avec le langage Python et la carte micro:bit ! Tu vas t’amuser à apprendre les bases du codage tout en explorant les fonctionnalités géniales de la carte micro:bit. Python est un langage de programmation puissant, mais pas compliqué une fois qu’on le comprend bien. Avec lui, tu pourras créer des jeux, contrôler des robots, afficher des messages et bien plus encore sur ta carte micro:bit.
Contrôler la carte micro:bit en python :
Dans ce livret, tu vas découvrir pas à pas comment écrire des lignes de code en Python pour contrôler ta carte micro:bit. N’aie pas peur, on va commencer par les bases, et tu verras à quel point coder peut-être amusant et créatif ! Alors, prêt à plonger dans le monde magique de la programmation avec Python et la carte micro:bit ? C’est parti !
Editeur MU Python :
MU est choisi comme éditeur pour sa simplicité d’utilisation et sa convivialité, spécialement conçu pour les débutants en programmation. Son interface intuitive offre une plateforme idéale pour coder en Python pour la carte micro:bit. Avec ses fonctionnalités adaptées, MU facilite l’écriture, la modification et l’exécution du code, offrant ainsi une expérience d’apprentissage agréable et efficace dans le cadre de la robotique.
PARTIE 01 : Découverte de la MICRO:BIT et de PYTHON
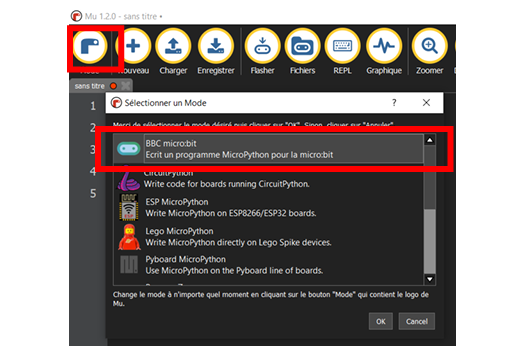
Découverte de MU
Dans MU par le bouton Mode sélectionner BBC microbit :
Puis créé un nouveau fichier
Nouveau fichier
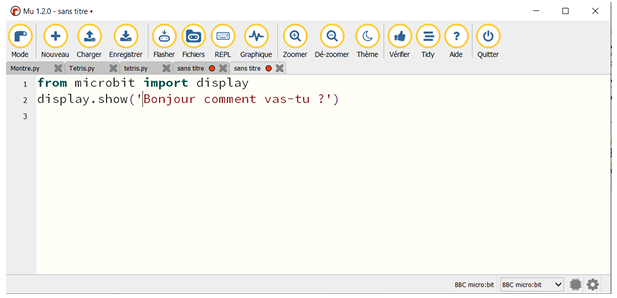
La première fonction, toute simple, de la carte micro:bit consiste à afficher un texte qui va défiler lettre par lettre sur l’écran :
from microbit import display
display.show('Bonjour comment vas-tu ?')
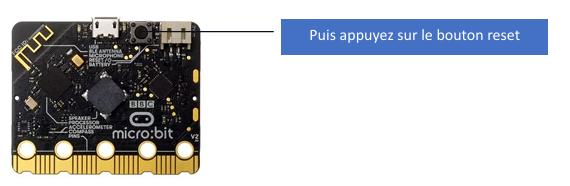
Flasher pour tester puis bouton reset pour lancer
Que constates-tu après avoir téléversé le programme ? Le texte doit défilé sur la carte micro :bit.
Tu peux simuler ton code sur le site : https://create.withcode.uk/ Copie et colle ton programme Python Appuie ensuite sur les touches Ctrl+Entrée. Le simulateur démarre et affiche la carte micro:bit avec laquelle il est possible d’interagir.
PARTIE 02 : Afficher un dessin
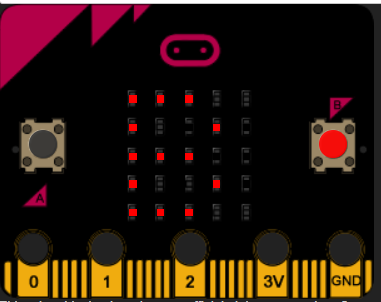
Il est possible d’afficher des icônes sur l’écran composé d’une matrice de 5×5 LEDs en utilisant la commande display.show().
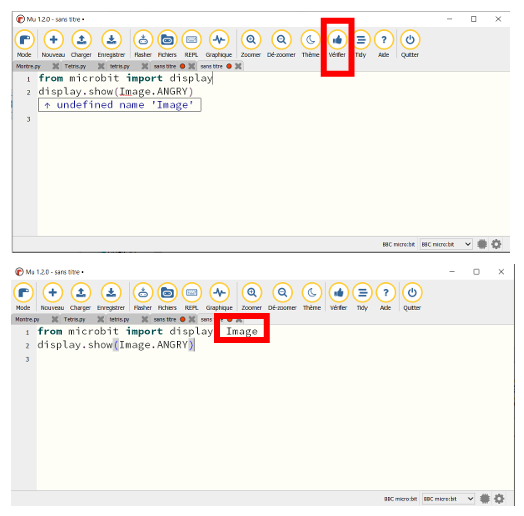
from microbit import display
display.show(Image.ANGRY)
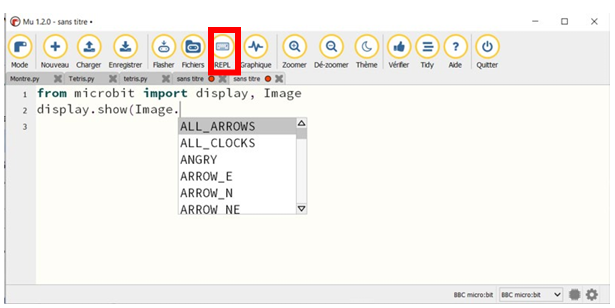
Utilise l’icône « Vérifier » pour ton code : il te manque l’objet « Image »
from microbit import display, Image
display.show(Image.ANGRY)
Flasher pour tester puis bouton reset pour lancer
Que constates-tu après avoir téléversé le programme ? L’icone s’affiche sur l’écran des 25 LEDs ?
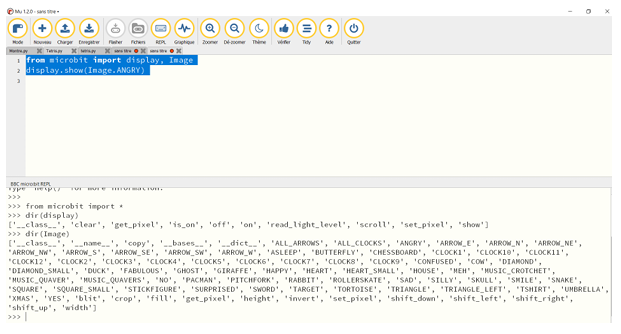
Pour connaître toutes les images possibles deux solutions :
Solution 1 :
Solution 2 :
Utilise l’icône « REPL » et dans la fenêtre ouverte frappe les indications suivantes :
from microbit import *
dir(display)
dir(Image)
PARTIE 03 : Créer sa propre icône
Tu peux concevoir ta propre icône en spécifiant quelles LEDs doivent être allumées pour dessiner l’image désirée.
from microbit import display, Image
led_image = Image('00900:00900:99999:00900:00900')
display.show(led_image)
Flasher pour tester puis bouton reset pour lancer
Que constates-tu après avoir téléversé le programme ? A quoi correspond les 0 et les 9 de led_image ? Comment modifier led_image pour avoir ton icône ? Tu as la possibilité de contrôler l’intensité de chaque LED en ajustant la valeur de chacune sur une échelle de 1 à 9.
from microbit import display, Image
led_image = Image( '00900:00500:95959:00500:00900')
display.show(led_image)
Flasher pour tester puis bouton reset pour lancer
Que constates-tu après avoir téléversé le programme ? Vois-tu des différences d’intensité entre chaque LED ?
Pour créer un effet de clignotement d’une icône, tu dois afficher cette dernière pendant une durée déterminée, puis éteindre la matrice de LEDs.
from microbit import display,Image
import time
while True:
led_image = Image('00900:00900:99999:00900:00900')
display.show(led_image)
time.sleep(0.5)
display.clear()
time.sleep(0.5)
Flasher pour tester puis bouton reset pour lancer
Que constates-tu après avoir téléversé le programme ? Comment peux-tu modifier pour un clignotement plus rapide ou plus lent ?
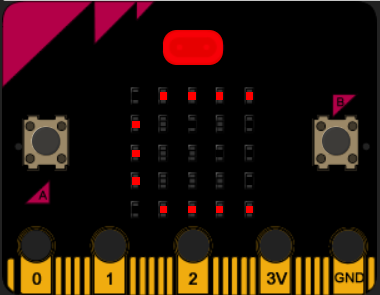
PARTIE 05 : Afficher un chronomètre en seconde
Afficher les aiguilles toutes les secondes.
from microbit import display,Image
import time
seconde=0
while True:
if seconde==0:
display.show(Image.CLOCK12)
if seconde==1:
display.show(Image.CLOCK1)
if seconde==2:
display.show(Image.CLOCK2)
if seconde==3:
display.show(Image.CLOCK3)
if seconde==4:
display.show(Image.CLOCK4)
if seconde==5:
display.show(Image.CLOCK5)
if seconde==6:
display.show(Image.CLOCK6)
if seconde==7:
display.show(Image.CLOCK7)
if seconde==8:
display.show(Image.CLOCK8)
if seconde==9:
display.show(Image.CLOCK9)
if seconde==10:
display.show(Image.CLOCK10)
if seconde==11:
display.show(Image.CLOCK11)
seconde=-1
time.sleep(1)
seconde+=1
Flasher pour tester puis bouton reset pour lancer
PARTIE 06 : Animer des images et jouer une note
La carte micro:bit dispose d’un buzzer. Programme le battement d’un cœur !
from microbit import *
import time
import music
# Buzzer on pin_speaker
while True:
display.show(Image.HEART)
time.sleep(1)
led_image = Image('00000:09090:09990:00900:00000')
display.show(led_image)
music.pitch(200, duration=500)
La carte micro:bit dispose de deux boutons permettant de déclencher des actions : le bouton A à gauche de la carte, le bouton B à droite. Programme en utilisant le bouton A :
from microbit import display, button_a, Image
import time
while True:
if button_a.is_pressed():
led_image = Image("40004:06060:00900:06060:40004")
display.show(led_image)
time.sleep(0.5)
display.clear()
time.sleep(0.5)
led_image = Image("33333:30003:30003:30003:33333")
display.show(led_image)
Flasher pour tester puis bouton reset pour lancer
Optimise ton code :
from microbit import display, button_a, Image
import time
led_image_a = Image("40004:06060:00900:06060:40004")
led_image = Image("33333:30003:30003:30003:33333")
while True:
if button_a.is_pressed():
display.show(led_image_a)
time.sleep(0.5)
display.clear()
time.sleep(0.5)
display.show(led_image)
Programme en utilisant le bouton A et le bouton B:
from microbit import display, button_a, button_b, Image
import time
led_image_a = Image("90009:09090:00900:09090:90009")
led_image_b = Image("99999:99999:99999:99999:99999")
led_image = Image("33333:30003:30003:30003:33333")
while True:
if button_a.is_pressed():
display.show(led_image_a)
time.sleep(0.5)
display.clear()
time.sleep(0.5)
if button_b.is_pressed():
display.show(led_image_b)
time.sleep(0.5)
display.clear()
time.sleep(0.5)
display.show(led_image)
from microbit import display, Image, pin_logo
import time
while True:
# Détection de la zone sensible
if pin_logo.is_touched():
led_image = Image('90009:09090:00900:09090:90009')
display.show(led_image)
# Affichage tant que la zone sensible est touchée
while pin_logo.is_touched():
pass
led_image = Image('00900:00900:99999:00900:00900')
display.show(led_image)
Flasher pour tester puis bouton reset pour lancer
Que constates-tu après avoir téléversé le programme ? Les LEDs changent quand tu passes ton doigt sur la zone sensitive ?
PARTIE 09 : Utiliser la touche sensitive et les boutons
Modifie ton programme sur le battement du cœur pour augmenter ou baisser la note par les touches A et B, activer ou éteindre le son avec la zone sensitive.
from microbit import display, Image, button_a, button_b, pin_logo
import time
import music
note = 200
on = True
start = time.time()
while True:
# Battement du coeur toutes les 1 seconde
if time.time() - start > 1:
start = time.time()
display.clear()
if on :
music.pitch(note, 200)
time.sleep(0.1)
else:
display.show(Image.HEART)
# Modification de la note avec la touche A
if button_a.is_pressed():
if note > 0 :
note -= 10
while button_a.is_pressed():
pass
on = True
# Modification de la note avec la touche B
if button_b.is_pressed():
if note < 600 :
note += 10
while button_b.is_pressed():
pass
on = True
# Activer ou non le battement du coeur
if pin_logo.is_touched():
if on :
on = False
else:
on = True
while pin_logo.is_touched() :
pass
Flasher pour tester puis bouton reset pour lancer
PARTIE 10 : Secouer les LEDs
Secouer la carte pour allumer les LEDs.
from microbit import display, Image, accelerometer
import time
while True:
if accelerometer.current_gesture() == 'shake' :
led_image = Image('90009:09090:00900:09090:90009')
display.show(led_image)
time.sleep(0.1)
led_image = Image('00900:00900:99999:00900:00900')
display.show(led_image)
Flasher pour tester puis bouton reset pour lancer
Que constates-tu après avoir téléversé le programme ? Tu peux essayer ces différentes possibilités :
from microbit import *
microphone.set_threshold(SoundEvent.LOUD, 80)
while True:
if microphone.current_event() == SoundEvent.LOUD:
led_image = Image('90009:09090:00900:09090:90009')
display.show(led_image)
led_image = Image('00900:00900:99999:00900:00900')
display.show(led_image)
Flasher pour tester puis bouton reset pour lancer
from microbit import *
import time
while True:
if microphone.sound_level() > 64:
led_image = Image('90009:09090:00900:09090:90009')
display.show(led_image)
time.sleep(0.3)
else:
led_image = Image('00900:00900:99999:00900:00900')
display.show(led_image)
Flasher pour tester puis bouton reset pour lancer
Que constates-tu après avoir téléversé le programme ? Essaye d’allumer les LEDs d’un claquement de mains, elles doivent rester allumer. Puis claque des mains pour les éteindre.
PARTIE 12 : Jouer de la musique
Joue différentes musiques en appuyant sur les boutons A et B et sur la zone sensitive.
from microbit import *
import random
import music
de_1 = Image('00000:00000:00900:00000:00000')
de_2 = Image('00009:00000:00000:00000:90000')
de_3 = Image('00009:00000:00900:00000:90000')
de_4 = Image('90009:00000:00000:00000:90009')
de_5 = Image('90009:00000:00900:00000:90009')
de_6 = Image('90009:00000:90009:00000:90009')
display.show('?')
nombre = 0
while True:
if accelerometer.current_gesture() == 'shake' :
nombre = random.randint(1, 6)
music.pitch(440, 50)
if nombre == 1:
display.show(de_1)
if nombre == 2:
display.show(de_2)
if nombre == 3:
display.show(de_3)
if nombre == 4:
display.show(de_4)
if nombre == 5:
display.show(de_5)
if nombre == 6:
display.show(de_6)
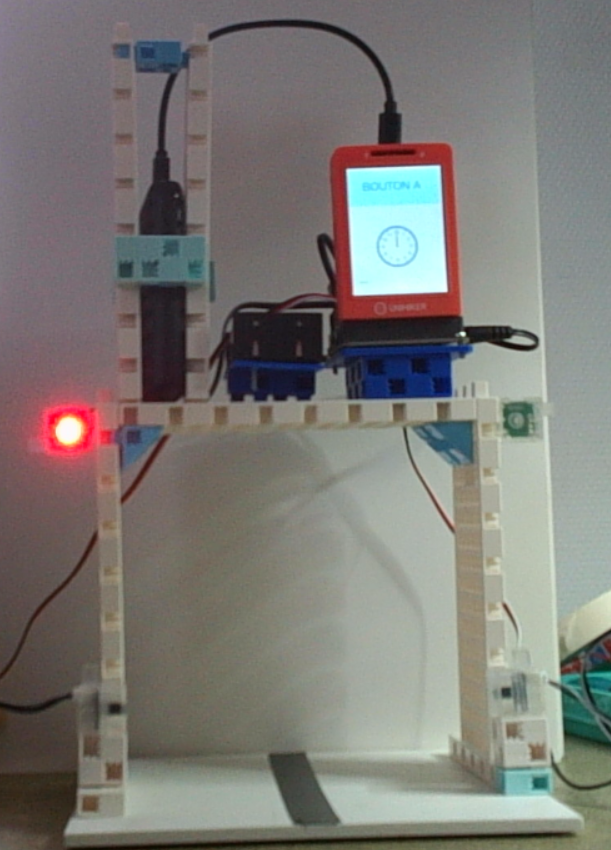
Créer un portique de chronométrage pour mesurer le temps mis par un robot suiveur de ligne pour parcourir un circuit. Le portique détecte le passage du robot grâce à des capteurs infrarouges et affiche le temps sur l’écran du microcontrôleur UNIHIKER.
Le robot passe une première fois sous le portique au départ, puis une deuxième fois à l’arrivée.
Premier passage : démarrage du chronomètre.
Deuxième passage : arrêt du chronomètre.
Les composants du portique
Élément
Rôle
Description
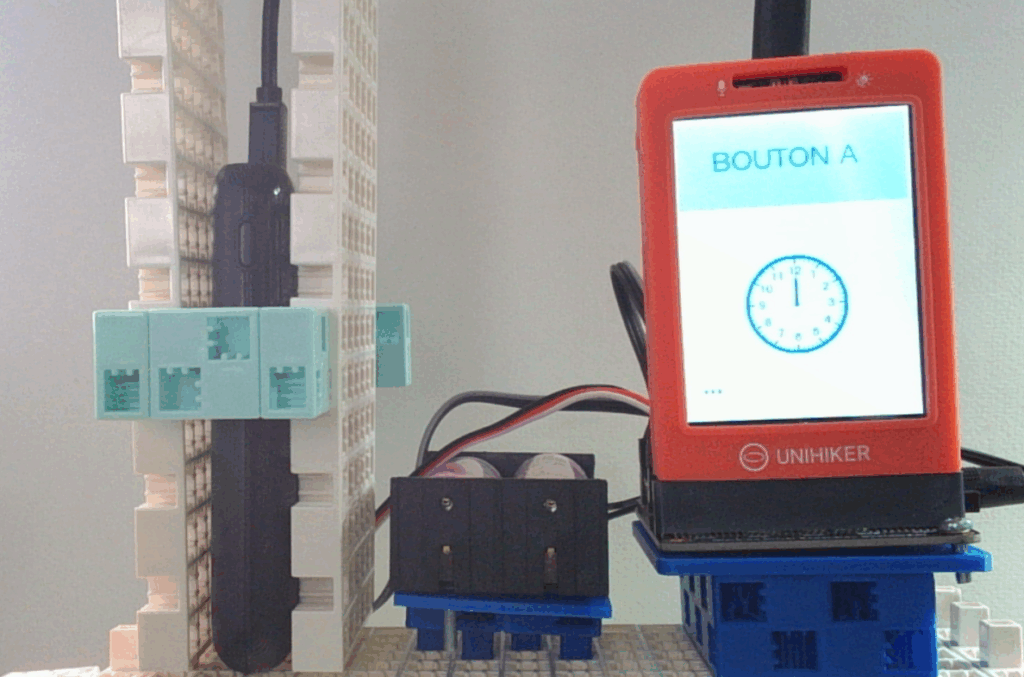
🧠 Microcontrôleur UNIHIKER
Le cerveau du portique
Il gère les capteurs, mesure le temps et affiche les résultats sur son écran.
👀 Deux capteurs photoréflecteurs IR
Détecter le robot
Placés en vis-à-vis de chaque côté du portique, ils détectent quand le robot passe (interruption du faisceau).
💡 LED verte
Indiquer que le portique est prêt
Allumée : le portique attend le départ du robot.
🔴 LED rouge
Indiquer la mesure en cours
Allumée : le portique mesure le temps du parcours.
📺 Écran intégré à l’UNIHIKER
Affichage du résultat
Montre le message “Prêt”, “Course en cours…” et le temps mesuré.
Le portique attend le robot (LED verte). Le robot passe une première fois → démarrage du chrono. Le robot passe une deuxième fois → arrêt du chrono et affichage.
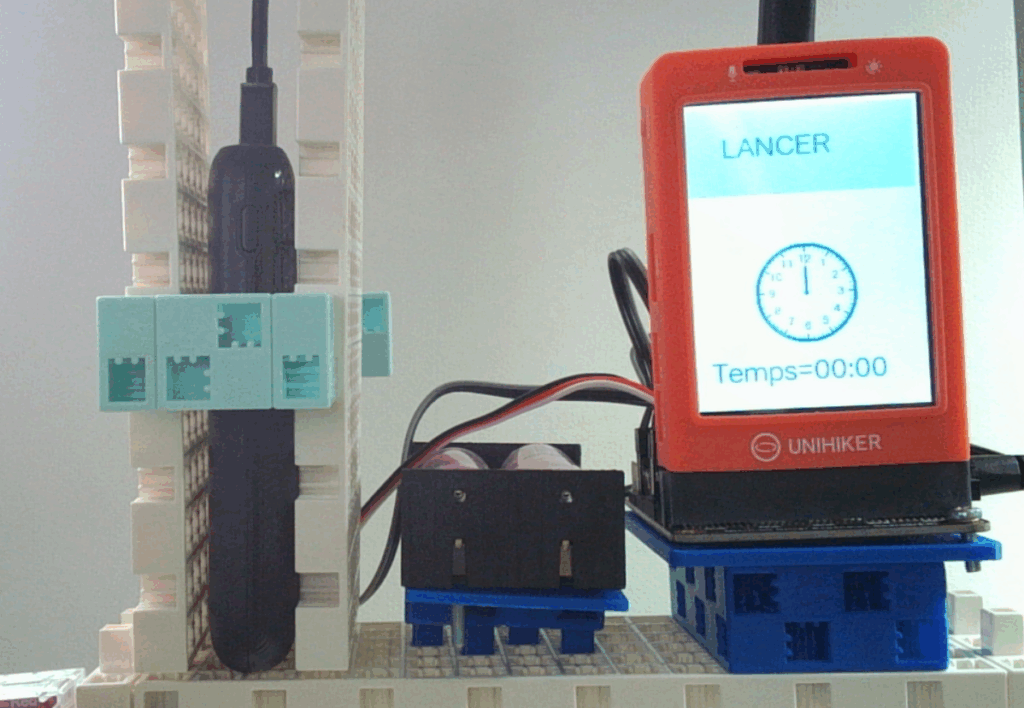
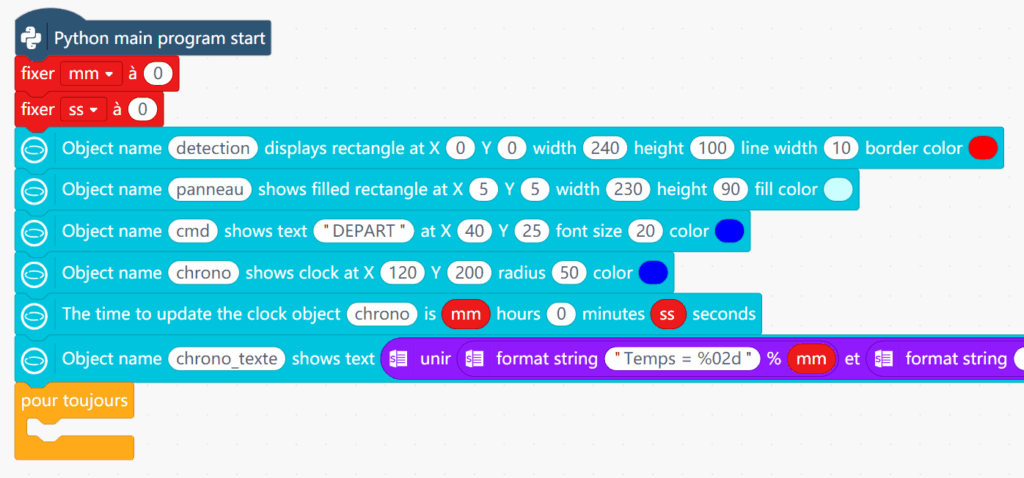
Programmation de l’interface
Détail des instructions pour l’affichage du temps :
Lance pour vérifier l’affichage
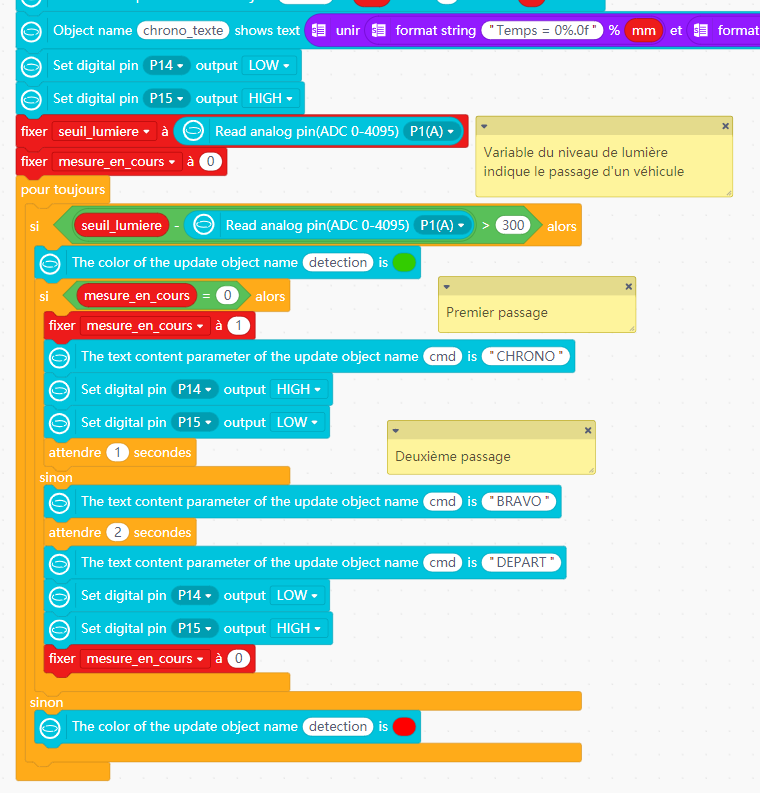
Programmation de la détection des passages
⚙️ Principe de détection du robot par le portique
🔦 1. Comment le portique détecte le passage du robot
Le portique utilise un photoréflecteur infrarouge. C’est un petit capteur qui envoie de la lumière invisible (infrarouge) et mesure la lumière qu’il reçoit en retour.
Quand rien ne passe, la lumière rebondit normalement : 👉 le capteur reçoit beaucoup de lumière.
Quand le robot passe devant, il bloque ou réfléchit moins la lumière : 👉 le capteur reçoit moins de lumière.
C’est ce changement de niveau de lumière que le portique utilise pour savoir qu’un robot vient de passer.
🧠 2. La variable mesure_en_cours
Pour que le portique sache s’il doit démarrer ou arrêter le chronomètre, on utilise une variable mémoire qu’on appelle ici :
Cette variable peut prendre deux valeurs :
Valeur
Signification
État du portique
0
Attente du robot au départ
Portique prêt, LED verte allumée
1
Chronométrage en cours
LED rouge allumée, le portique mesure le temps
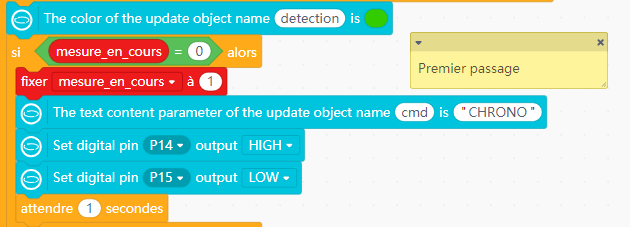
⏱️ 3. Les deux passages du robot
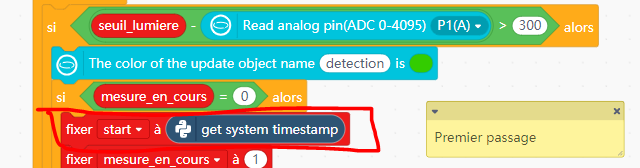
🟢 Premier passage : le départ
Le portique attend (mesure_en_cours = 0).
Le robot passe → le capteur détecte un changement de lumière.
Le portique :
allume la LED rouge,
met mesure_en_cours = 1,
attente que le véhicule passe.
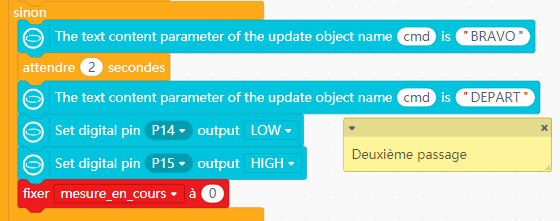
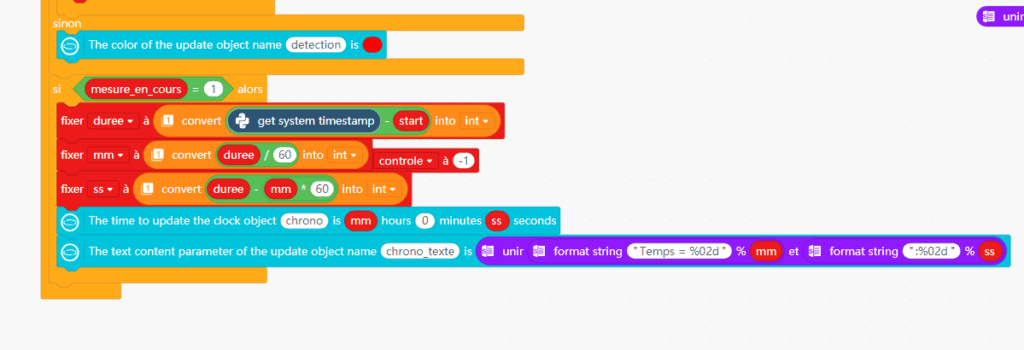
🔴 Deuxième passage : l’arrivée
Le robot repasse sous le portique.
Le capteur détecte à nouveau un changement de lumière.
Le portique :
rallume la LED verte,
remet mesure_en_cours = 0 (prêt pour une nouvelle mesure),
attente que le véhicule passe.
Le programme avec la détection et le comptage des passages :
Lance pour vérifier
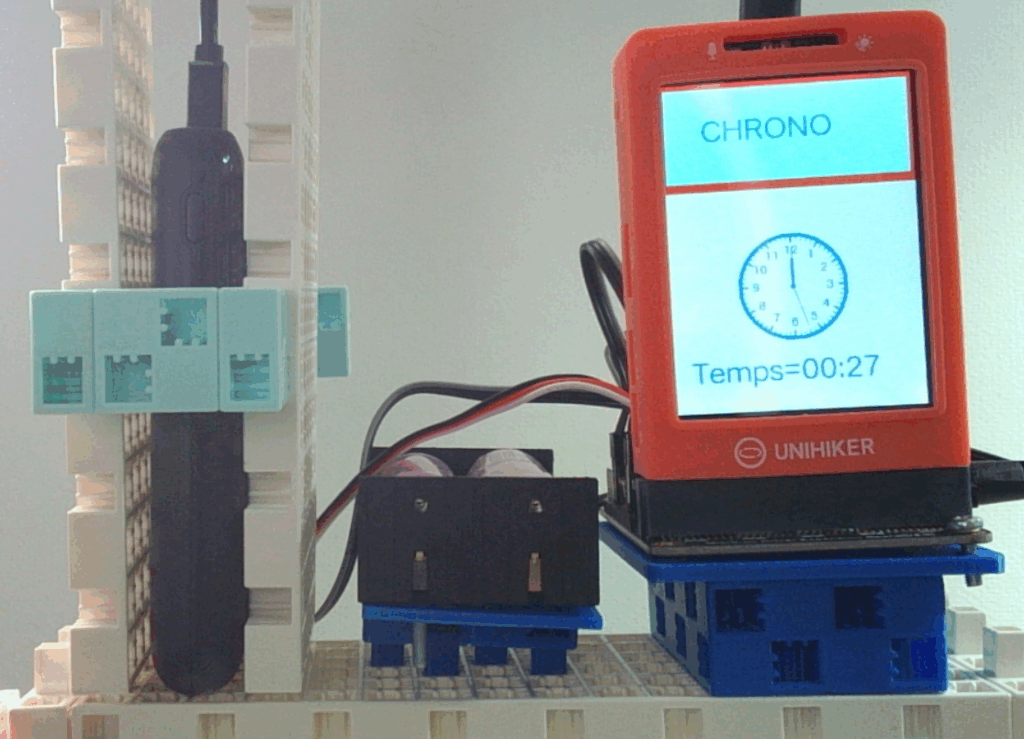
Programmation du chronomètre
🟢 Premier passage : le départ
démarre le chronomètre,
⏱️ Affichage du temps
affiche le temps sur l’écran,
Lance pour vérifier
Programmation en python
Bibliothèques conseillées
import time import math from unihiker import GUI from pinpong.board import Board,Pin from pinpong.extension.unihiker import *
Objets à instancier # Interfaces u_gui=GUI() # Micro contrôleur Board().begin()
# Photo réflecteur IR sur le port P1 p_p1_analog=Pin(Pin.P1, Pin.ANALOG)
# LED rouge p_p14_out=Pin(Pin.P14, Pin.OUT)
# LED verte p_p15_out=Pin(Pin.P15, Pin.OUT)
# Lecture du photo réflecteur IR lumiere = p_p1_analog.read_analog()
# Gestion des LEDs p_p14_out.write_digital(0) p_p15_out.write_digital(1)
# Affichage du chronomètre mm = 0 ss = 0 chrono=u_gui.draw_clock( h=mm,m=0,s=ss, x=120,y=200,r=50, color= »#0000FF ») text_chrono = u_gui.draw_text( text= »Temps= »+ str(mm).zfill(2)+ »: »+str(ss).zfill(2), x=20,y=260, font_size=20, color= »#0000FF »)
# Affichage d’un texte u_gui.draw_text( text= »texte à afficher », x=40,y=25, font_size=20, color= »#0000FF »)
# Dessin d’une surface rectangle u_gui.fill_rect(x=5,y=5,w=230,h=90,color= »#CCFFFF »)
# Dessin d’un pourtour d’un rectangle u_gui.draw_rect(x=0,y=0,w=240,h=100,width=10,color= »#FF0000″)
# Gestion du temps (pour le chrono) # Récupération du temps start = time.time() # Calcul d’une durée en minutes et secondes duree = int(time.time() – start) mm = int(duree / 60) ss = int(duree – (mm * 60))
# Exemple pour l’affichage du temps chrono.config(h=mm,m=0,s=ss) text_chrono.config(text= »Temps= »+str(mm).zfill(2)+ »: »+str(ss).zfill(2))
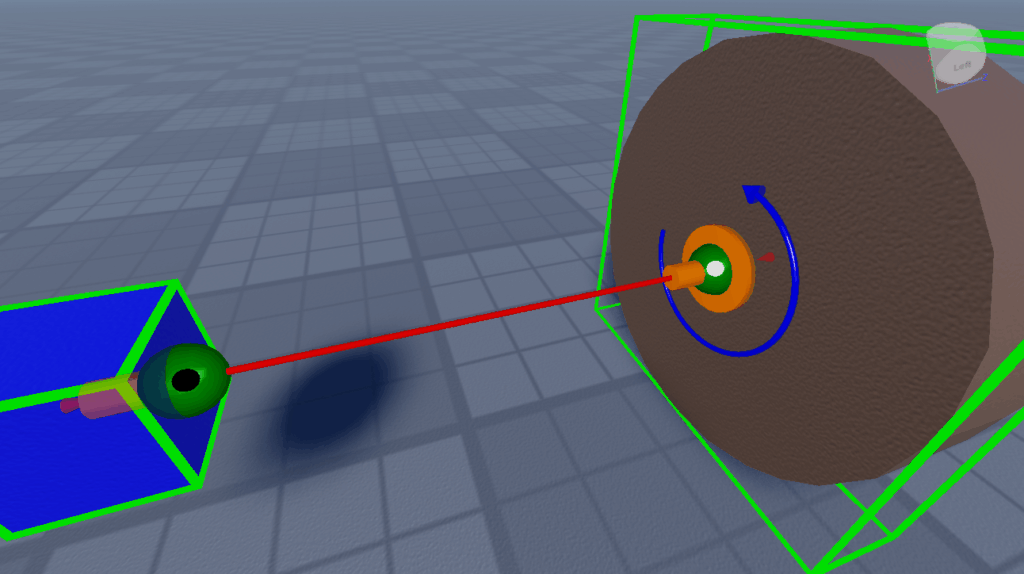
Comment utiliser LinearVelocity, VectorForce et AssemblyLinearVelocity pour lancer ou faire bouger des objets. Comment utiliser HingeConstraint pour faire ouvrir une barrière. Comment construire une voiture et la piloter
LinearVelocity, VectorForce et AssemblyLinearVelocity — servent tous à faire bouger des objets dans Roblox, mais ils ne fonctionnent pas du tout de la même manière.
LinearVelocity
Ce que ça fait : ➡️ Fait bouger un objet à une vitesse constante dans une direction. ➡️ Roblox s’occupe automatiquement de calculer la force nécessaire pour maintenir cette vitesse.
C’est parfait pour :
Faire voler ou propulser un objet
Tirer des projectiles
Donner un mouvement stable et constant
VectorForce
Ce que ça fait : ➡️ Applique une force brute (comme une poussée de moteur ou la gravité). ➡️ La vitesse dépend de la masse de l’objet et des forces qui s’opposent.
L’objet est poussé mais ralentit ou accélère selon sa masse, sa friction, etc.
C’est parfait pour :
Simuler une propulsion physique réaliste
Faire un jetpack, un vent, une poussée de moteur
Ajouter une force continue (comme la gravité personnalisée)
AssemblyLinearVelocity
Ce que ça fait : ➡️ Change directement la vitesse actuelle du corps rigide complet. ➡️ C’est comme “modifier” la vitesse sans appliquer de vraie force.
L’objet prend instantanément cette vitesse. Pas de physique calculée, pas de force — juste une vitesse imposée.
📍 C’est parfait pour :
Faire bouger instantanément un objet
Lancer un objet d’un coup
Remettre à zéro sa vitesse facilement
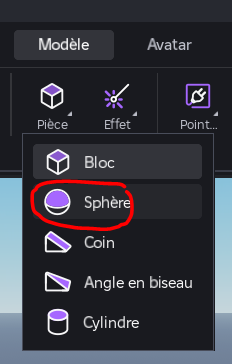
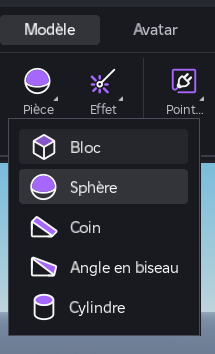
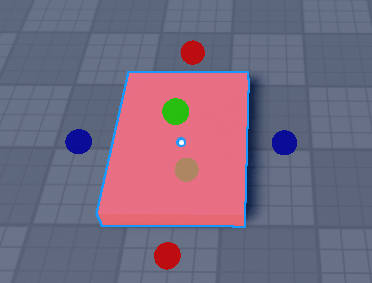
Crée une balle à lancer
Crée une balle à partir de l’onglet Modèle puis Pièce et Sphère :
Renomme le part en « Balle » :
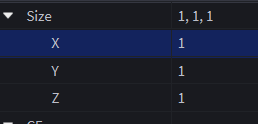
Change les propriétés suivantes du part Balle :
Déplace le part Balle sous ServerStorage :
ServerStorage permet de stocker des objets secrets ou internes au serveur (comme des scripts, modèles ou outils que les joueurs ne doivent pas voir directement). Donc la conséquence immédiate du déplacement de la balle : celle-ci n’est plus visible dans ton jeu, ni dans ton workspace.
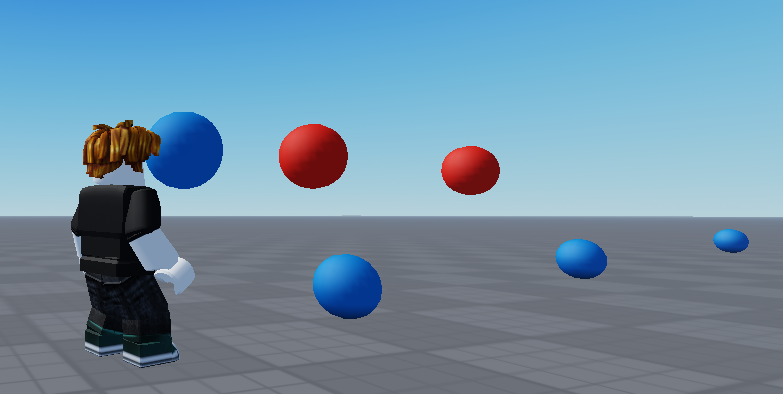
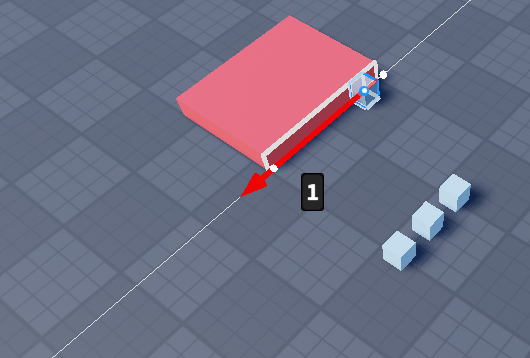
Programme un lancer avec linearVelocity :
VectorVelocity fait bouger ta balle à une vitesse constante dans la direction du regard du joueur.
La balle rouge bouge sans la contrainte de la physique du jeu, notamment de la gravité.
Crée un script sous ServerScriptService et lance les balles devant le joueur :
-- je récupère la balle dans le ServerStorage
local ss = game:GetService("ServerStorage")
local balle= ss:WaitForChild("Balle")
-- je récupère la liste des jueurs
local players = game:GetService("Players")
-- je lance la blle avec linearVelocity
local function linearVelocityBall(player)
-- je récupère le corps du joueur
local char = player.Character or
player.CharacterAdded:Wait()
local hrp = char:WaitForChild("HumanoidRootPart")
-- Je génère une copie de la balle dans le workspace
local ball = balle:Clone()
ball.BrickColor = BrickColor.Red()
ball.Parent = workspace
ball.CFrame = hrp.CFrame * CFrame.new(0, 2, -2)
-- J'applique à la balle une force constante
local lv = Instance.new("LinearVelocity")
lv.MaxForce = math.huge
lv.VelocityConstraintMode =
Enum.VelocityConstraintMode.Vector
lv.VectorVelocity = hrp.CFrame.LookVector * 5
lv.Parent = ball
-- J'attache cette force à la balle
local attchment = Instance.new("Attachment")
attchment.Parent = ball
lv.Attachment0 = attchment
-- Je détruis la balle au bout de 5 secondes
game.Debris:AddItem(ball, 5)
end
-- Le joueur se connecte
players.PlayerAdded:Connect(function(player)
player.CharacterAdded:Connect(function()
for i = 1, 5 do
task.wait(1)
linearVelocityBall(player)
end
end)
end)
VectorVelocity fait bouger ta balle à une vitesse constante dans la direction du regard du joueur.
L’objet bouge sans que tu aies besoin de gérer la physique.
Ton script instancie un Attachment. Un Attachment est un point de repère invisible dans une pièce (Part, MeshPart, etc.) C’est comme une punaise virtuelle que tu peux placer n’importe où dans la pièce.
🔹 Il sert à :
indiquer un point précis où appliquer une force, un effet, ou une jointure,
ou relier deux objets ensemble (LinearVelocity, VectorForce).
L’objet bouge sans que tu aies besoin de gérer la physique.
Programme un lancer avec vectorForce:
Applique une force brute (comme une poussée de moteur ). La vitesse dépend de la masse de l’objet et des forces qui s’opposent. La belle bleue est poussée mais ralentit ou accélère selon sa masse, sa friction et subit la gravité.
Modifie ton script pour le lancer avec une balle bleue :
local function vectorForceBall(player)
-- je récupère le corps du joueur
local char = player.Character or player.CharacterAdded:Wait()
local hrp = char:WaitForChild("HumanoidRootPart")
-- Je génère une copie de la balle dans le workspace
local ball = balle:Clone()
ball.BrickColor = BrickColor.Blue()
ball.Parent = workspace
ball.CFrame = hrp.CFrame * CFrame.new(0, 2, -2)
-- J'applique à la balle un VectorForce
local vf = Instance.new("VectorForce")
vf.RelativeTo = Enum.ActuatorRelativeTo.World
vf.ApplyAtCenterOfMass = true
vf.Force = hrp.CFrame.LookVector * ball:GetMass() * 5
vf.Parent = ball
-- J'attache cette force à la balle
local attchment = Instance.new("Attachment")
attchment.Parent = ball
vf.Attachment0 = attchment
-- Je détruis la balle au bout de 5 secondes
game.Debris:AddItem(ball, 5)
end
players.PlayerAdded:Connect(function(player)
player.CharacterAdded:Connect(function()
for i = 1, 5 do
task.wait(1)
linearVelocityBall(player)
task.wait(1)
vectorForceBall(player)
end
end)
end)
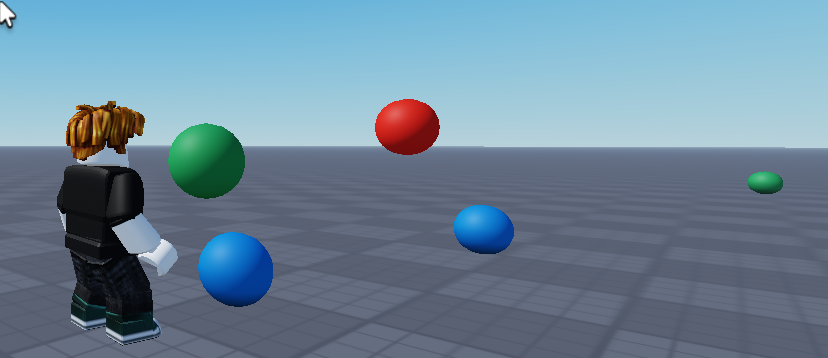
Programme un lancer avec AssemblyLinearVelocity
La balle verte prend instantanément la vitesse appliquée. Pas de physique calculée, pas de force — juste une vitesse imposée
Modifie ton script :
local function assemblyLinearVelocityBall(player)
-- je récupère le corps du joueur
local char = player.Character or player.CharacterAdded:Wait()
local hrp = char:WaitForChild("HumanoidRootPart")
-- Je génère une copie de la balle dans le workspace
local ball = balle:Clone()
ball.BrickColor = BrickColor.Green()
ball.Parent = workspace
ball.CFrame = hrp.CFrame * CFrame.new(0, 2, -2)
-- J'applique une vitesse à l'objet
ball.AssemblyLinearVelocity = hrp.CFrame.LookVector *
ball:GetMass() * 5
-- Je détruis la balle au bout de 5 secondes
game.Debris:AddItem(ball, 5)
end
players.PlayerAdded:Connect(function(player)
player.CharacterAdded:Connect(function()
task.wait(5)
for i = 1, 5 do
task.wait(1)
linearVelocityBall(player)
task.wait(1)
vectorForceBall(player)
task.wait(1)
assemblyLinearVelocityBall(player)
end
end)
end)
PARTIE 02 : Une barrière
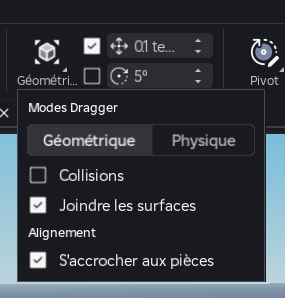
Avant de commencer à construire ta barrière, choisis ces options pour ton projet :
Construction d’une barrière
Puis commence à construire ta barrière en créant un bloc :
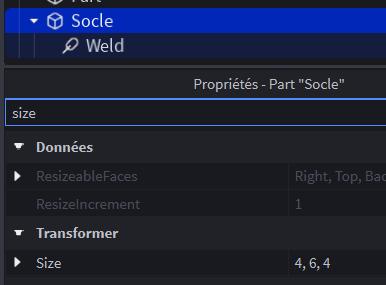
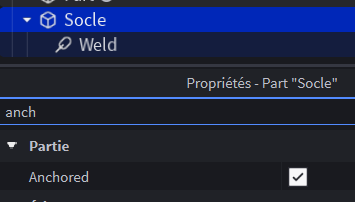
Renomme le part en Socle :
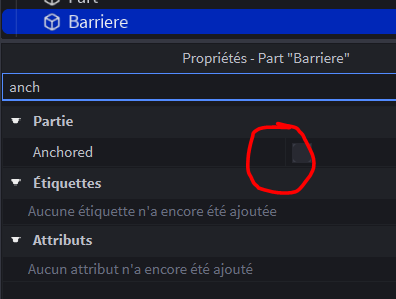
Modifie les propriétés suivantes :
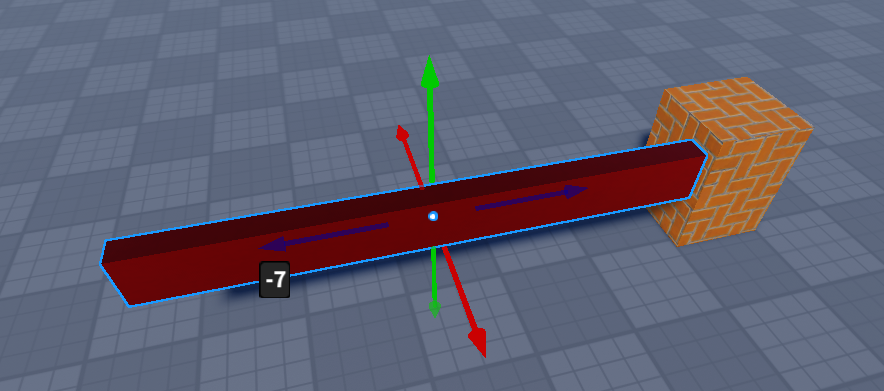
Puis un deuxième part pour la barrière :
Renomme le part en Barriere :
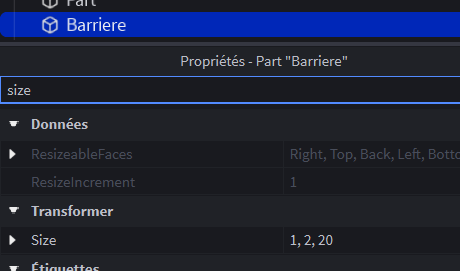
Avec les propriétés suivantes :
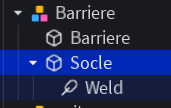
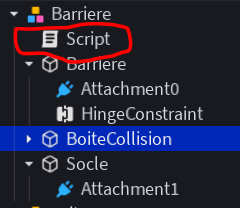
Sous ton workspace crée un Model que tu renommes en Barriere puis range les deux parts précédent sous ce Model :
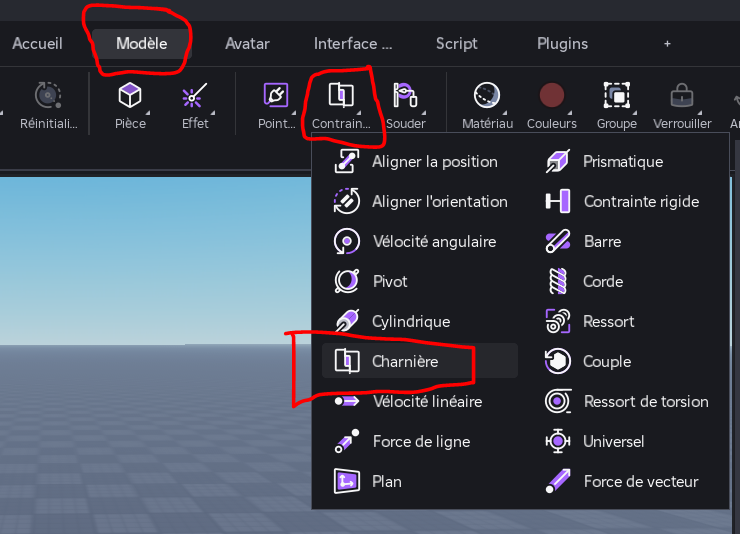
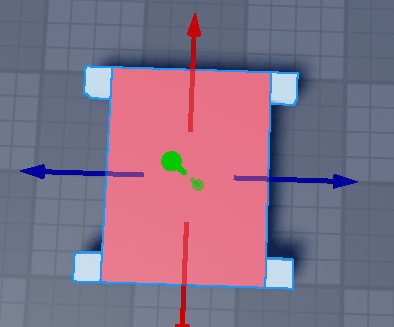
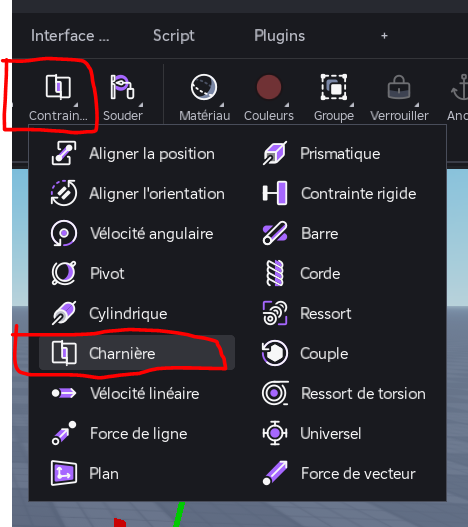
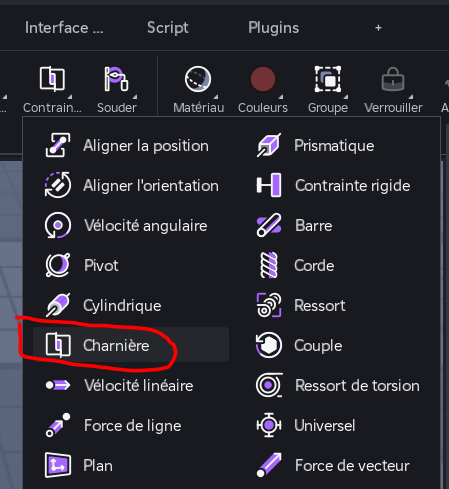
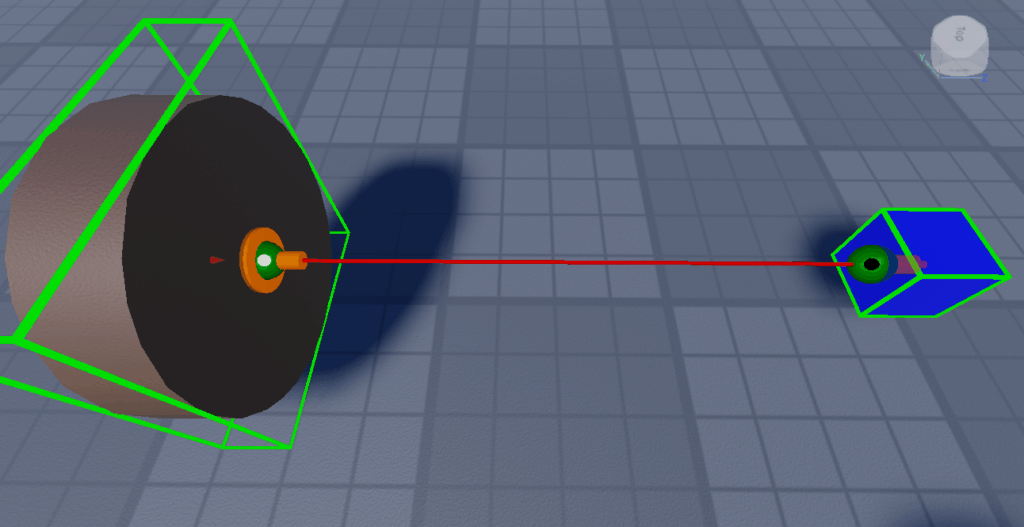
Installe une charnière pour le mécanisme d’ouverture de la porte :
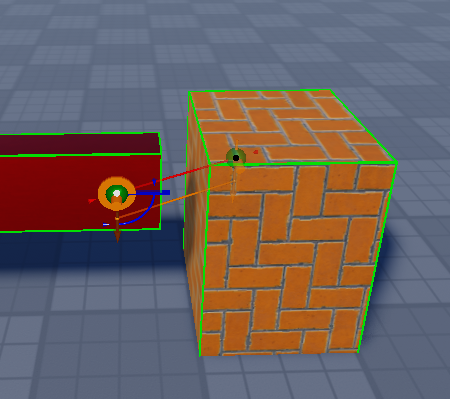
Avec un premier point d’appui sur la barrière et un deuxième sur le socle :
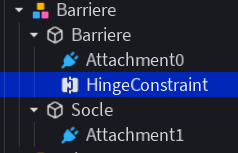
Tu dois obtenir ce résultat dans explorer :
deux points d’attachement un sur le socle et un autre sur la barrière,
une charnière HingeConstraint sur la barrière.
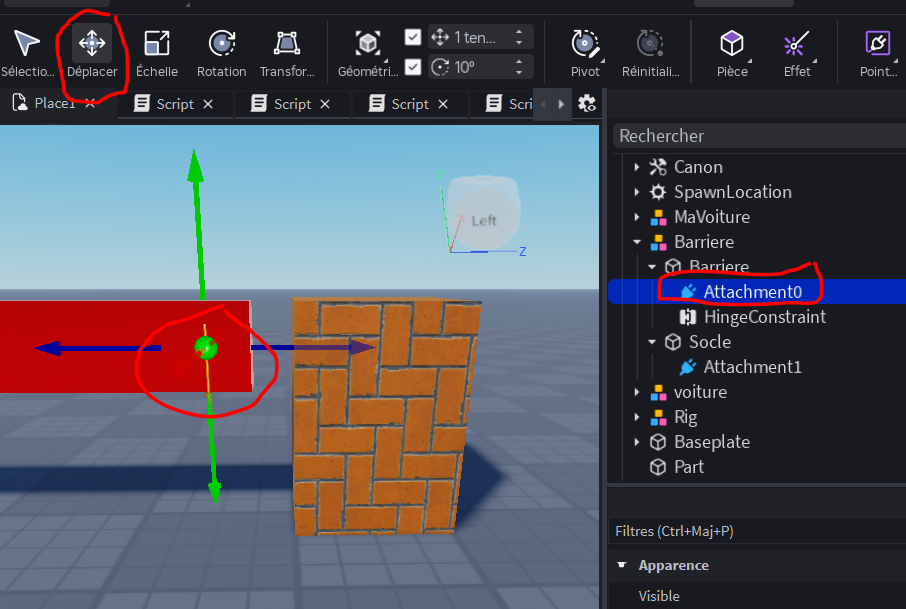
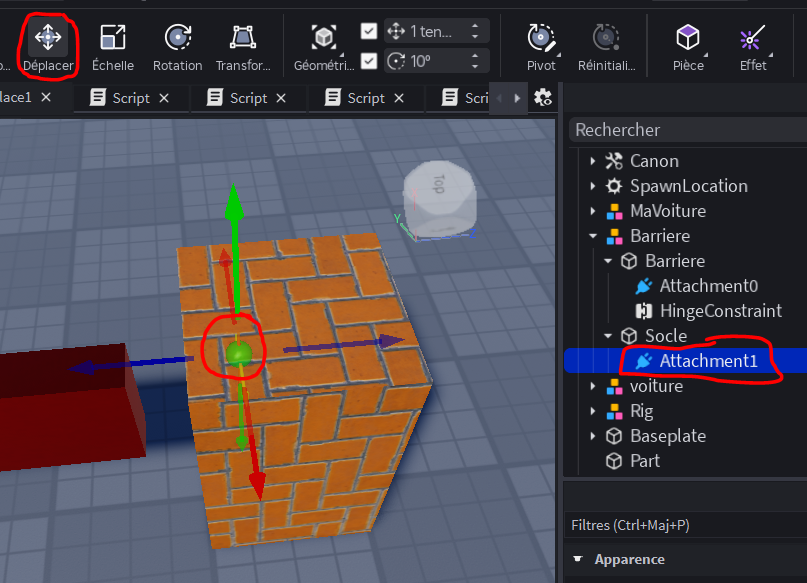
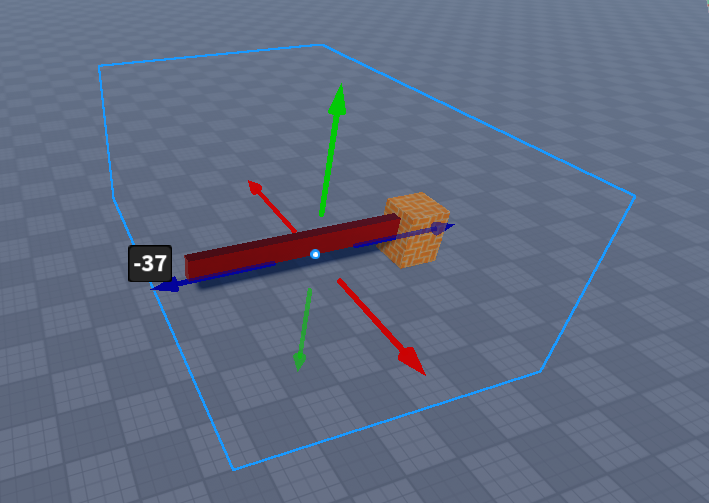
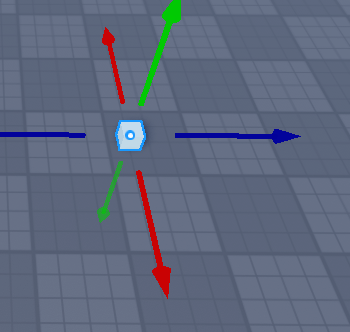
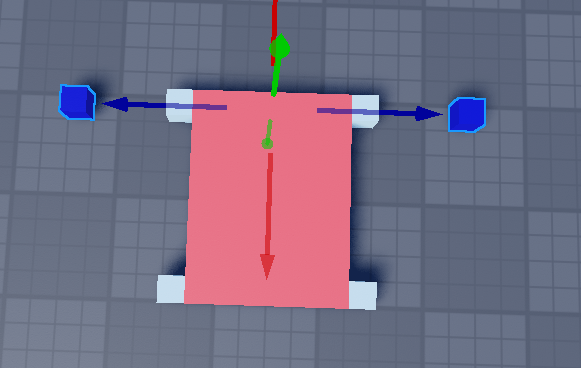
Tu peux régler plus précisément le point d’attachement, en sélectionnant celui-ci dans explorer et en utilisant l’outil déplacer :
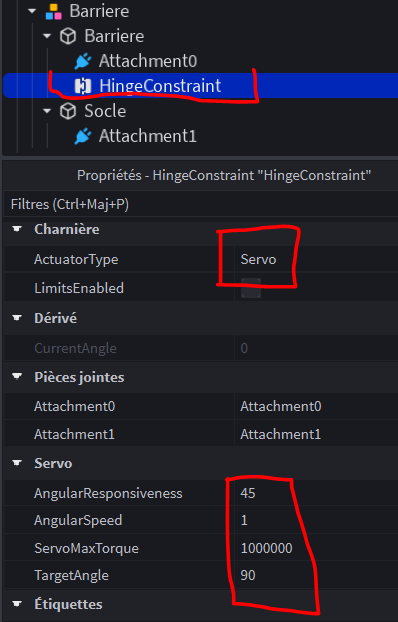
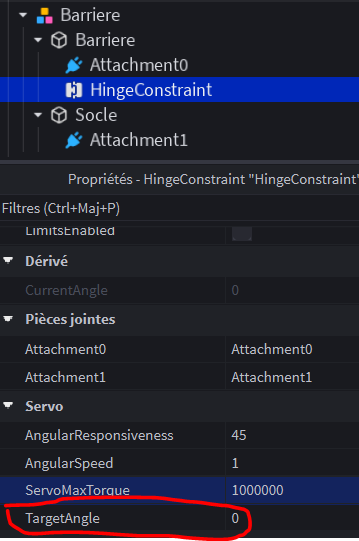
Modifie les propriétés du HingeConstraint :
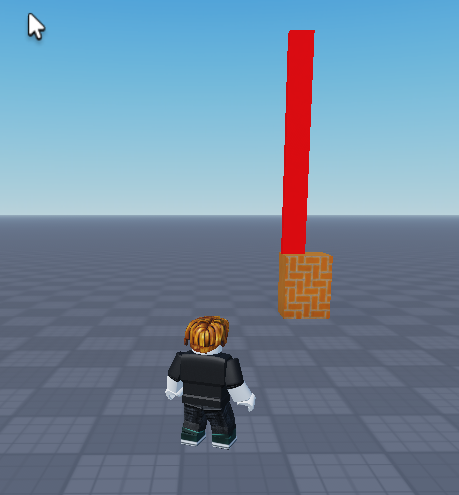
Si tu lances ton jeu, tu obtiens ce résultat :
Si tu changes la propriété TargetAngle :
En lançant ton jeu, tu obtiens le résultat suivant :
Automatisation d’ouverture de la barrière
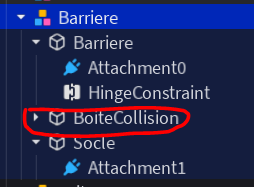
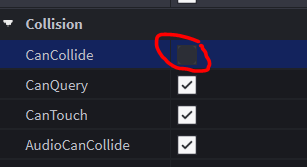
Rajoute une boîte de collision transparente autour de la barrière afin d’automatiser son ouverture :
N’oublie pas d’enlever le CanCollide de la boîte de collision.
Puis crée un script dans ton Model Barriere :
Puis saisie ce script pour ouvrir et fermer automatiquement ta barrière :
-- Récupération de la barrière
local barriere = script.Parent.Barriere
-- Récupération de la boîte de collision
local boiteCollision = script.Parent.BoiteCollision
-- Quand la boîte de collision touche un un personnage
boiteCollision.Touched:Connect(function(hit)
-- On récupère le modèle parent de la pièce touchée
local character = hit.Parent
-- On vérifie si ce modèle a un "Humanoid" (seuls les personnages en ont un)
local humanoid = character:FindFirstChild("Humanoid")
if humanoid then
-- Ouverture de la barrière
barriere.HingeConstraint.TargetAngle = 90
end
end)
-- Quand la boîte de collision ne touche plus de personnage
boiteCollision.TouchEnded:Connect(function(hit)
-- On récupère le modèle parent de la pièce touchée
local character = hit.Parent
-- On vérifie si ce modèle a un "Humanoid" (seuls les personnages en ont un)
local humanoid = character:FindFirstChild("Humanoid")
if humanoid then
-- Fermeture de la barrière
barriere.HingeConstraint.TargetAngle = 0
end
end)
-- Fermeture de la barrière au début
barriere.HingeConstraint.TargetAngle = 0
Lance ton jeu pour tester ta barrière automatique :
PARTIE 03 : ROULER EN VOITURE
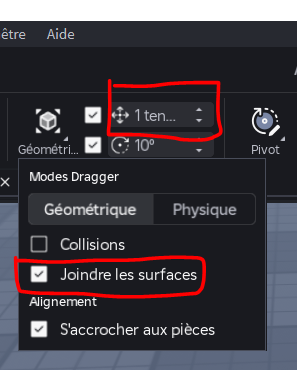
Choisis ces paramètres pour la construction de ton véhicule :
Joindre les surfaces
1 pour l’incrémentation pour dimensionner les objets
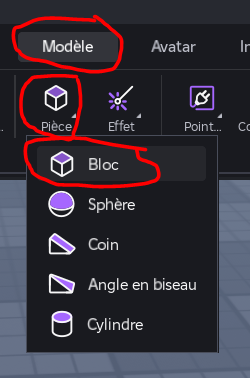
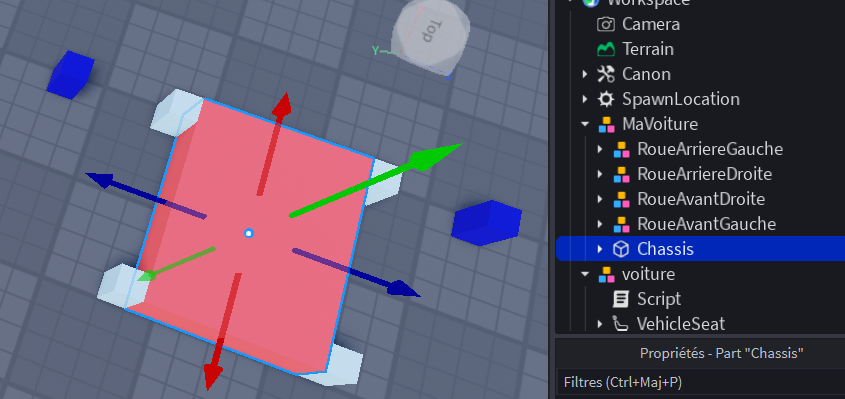
Choix d’un Bloc pour le châssis de la voiture
Redimensionne le châssis de ta voiture et renomme le part en « Chassis« :
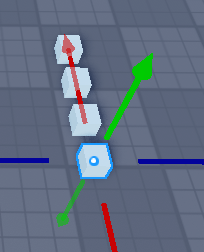
Crée un nouveau bloc pour créer les moyeux des roues de la voiture :
Choisis sa demension :
Duplique en quatre blocs :
Colle les blocs sur le châssis :
Sur les quatre côtés du châssis :
Duplique deux nouveaux blocs pour la direction, modifie la couleur :
Décoche la propriété CanCollide pour ces blocs :
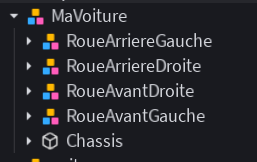
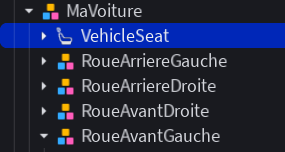
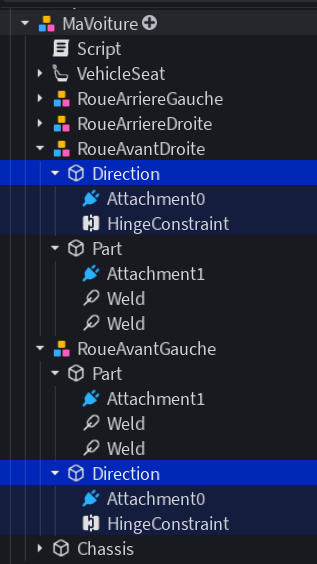
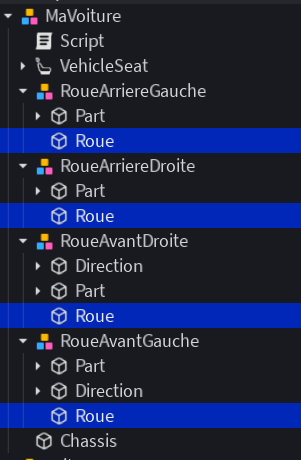
Sous worksapace crée cette structure et range tous les parts de ta voiture :
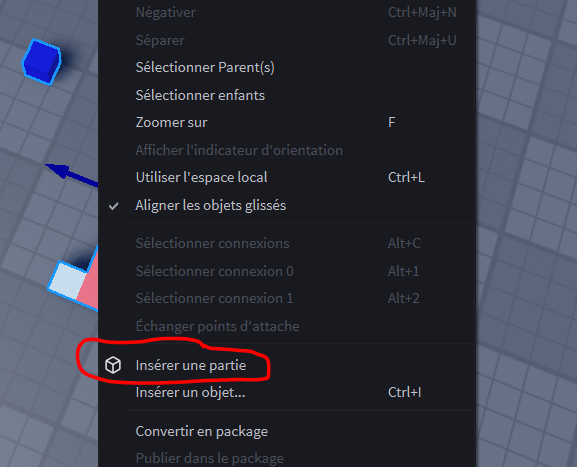
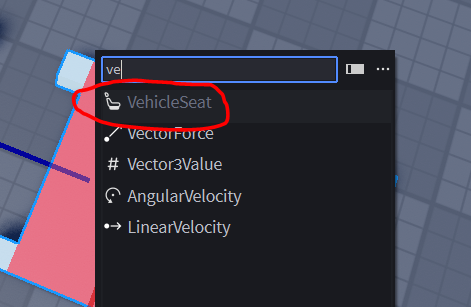
Par le clic droit de la souris, demande le menu suivant :
Insére l’objet VehicleSeat :
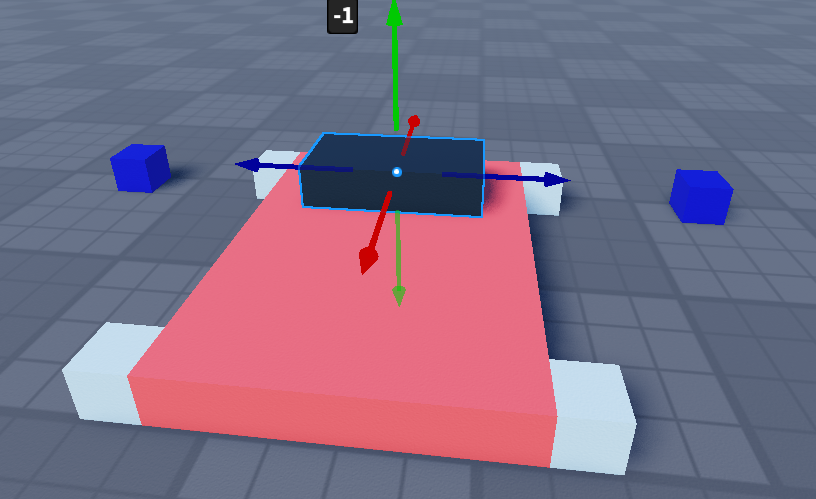
Installe cet objet sur le châssis, cet objet représente le siège du conducteur :
Déplace cet objet sous l’arborescence de ta voiture :
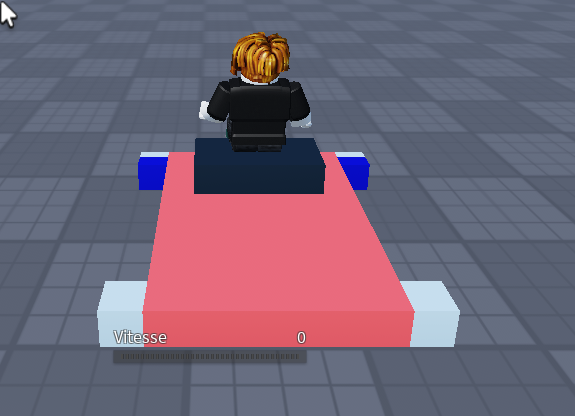
Lance le jeu pour venir t’assoir sur le siège de ton véhicule :
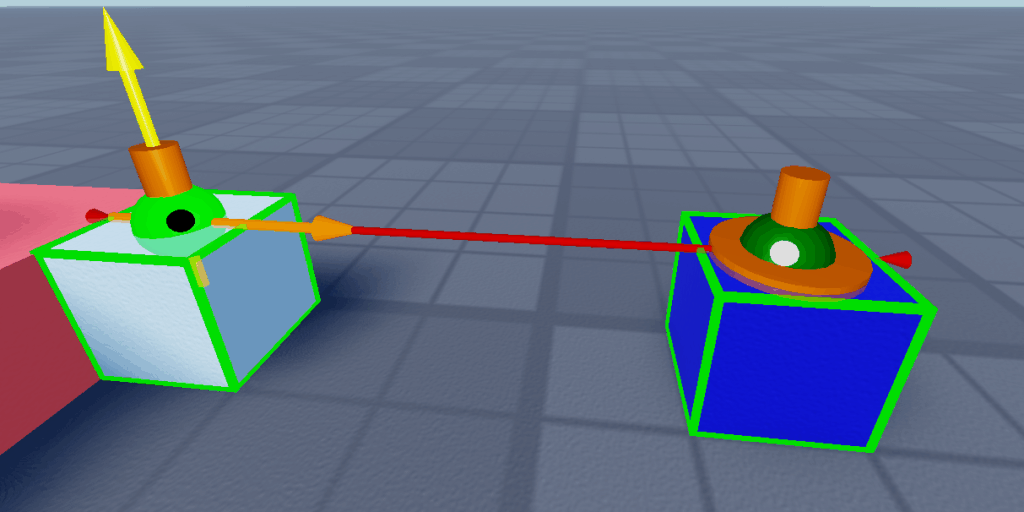
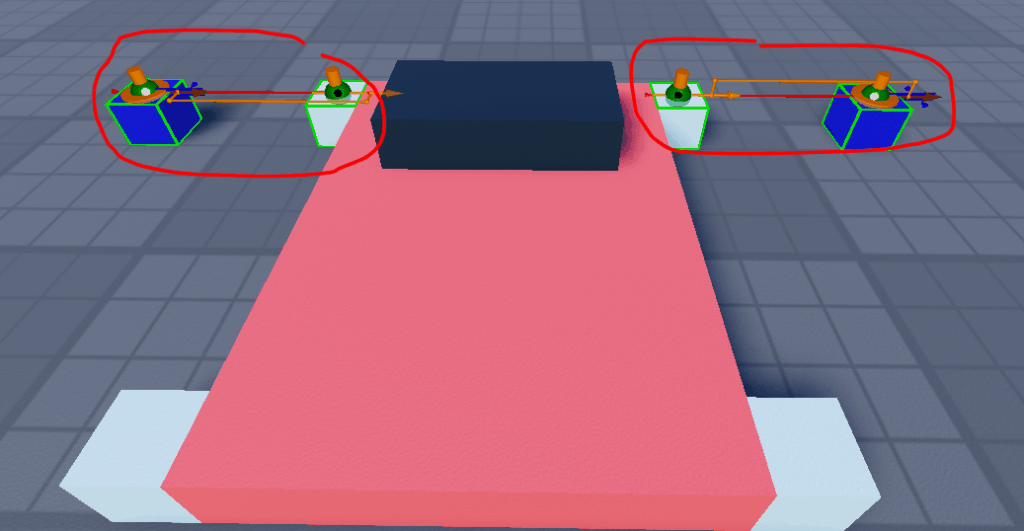
Insère des contraintes entre les pièces de ton véhicule pour transmettre la direction :
Vision de la transmission de direction à droite
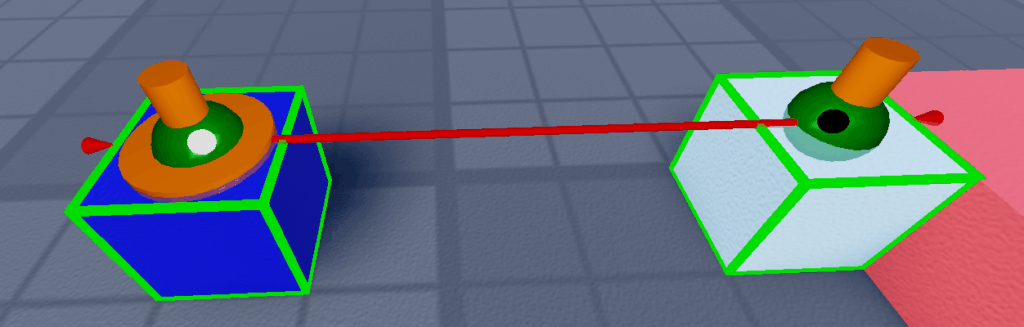
Vision de la transmission de direction à gauche
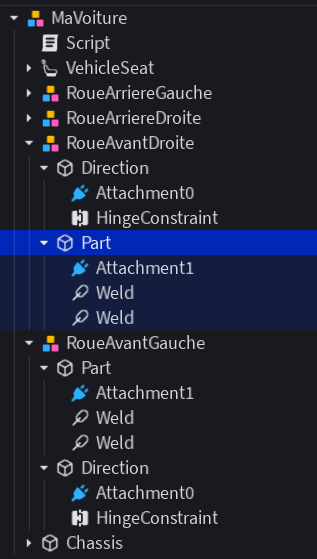
Tu dois obtenir ce résultat dans ton explorer :
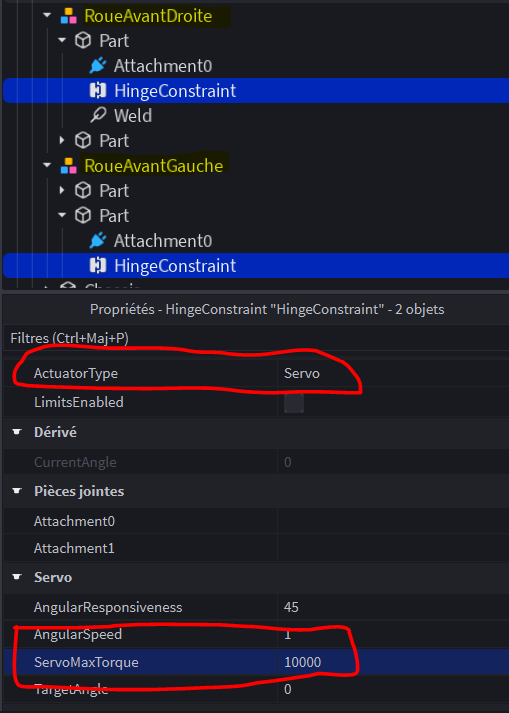
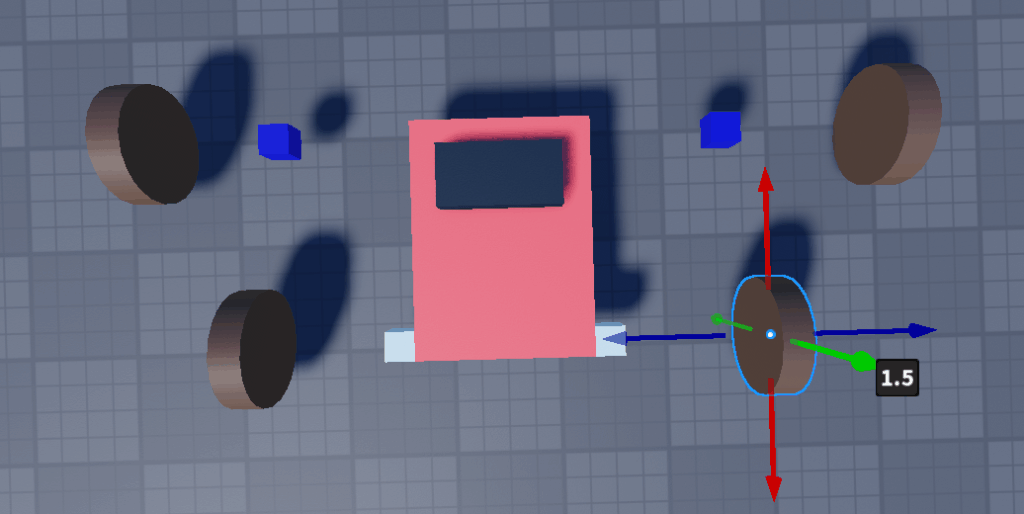
Sélectionne les HingeConstraint de tes deux roues de l’avant pour modifier les propriétés suivantes :
Rappel : c’est quoi un HingeConstraint ?
Un HingeConstraint = une charnière virtuelle. Il permet à un objet de tourner autour d’un axe (comme une porte, une roue, ou un bras robotique).
Mais quand on ajoute un moteur dessus, il peut :
tourner jusqu’à un certain angle → Servo
Quand ActuatorType = Servo
Le Servo agit comme un moteur intelligent : il regarde la position actuelle de la pièce, puis la fait tourner jusqu’à atteindre l’angle qu’on lui demande.
👉 On lui donne une cible (TargetAngle), et il s’arrête tout seul quand il y arrive.
🔩 3️⃣ Les propriétés importantes
Propriété
Rôle
TargetAngle
l’angle à atteindre (en degrés)
ServoMaxTorque
la force que le moteur peut exercer pour y arriver
AngularSpeed
vitesse à laquelle il tourne pour atteindre l’angle
ActuatorType
doit être mis sur Enum.ActuatorType.Servo
Tu dois obtenir la visualisation du mécanisme de la direction de tes deux roues :
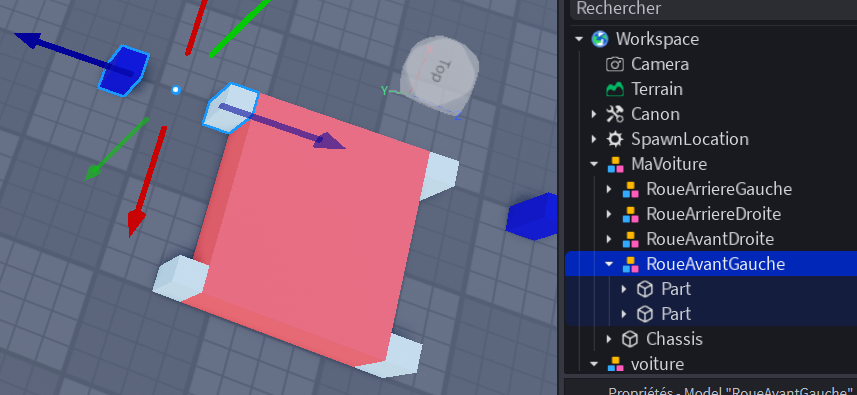
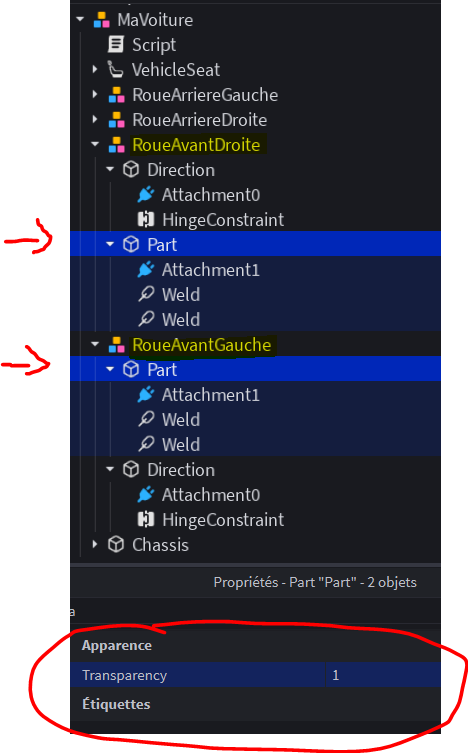
Renomme les parts des roues avant droite et gauche ayant un HingeConstraint en « Direction » :
Rend invisible les deux parts des deux roues avant :
Rajoute un script sous le modèle de ta voiture :
local seat = script.Parent.VehicleSeat
local roueAvantGauche = script.Parent.RoueAvantGauche
local roueAvantDroite = script.Parent.RoueAvantDroite
local steerAngle = 30
seat:GetPropertyChangedSignal("Steer"):Connect(function()
print("Steer =", seat.Steer)
roueAvantGauche.Direction.HingeConstraint.TargetAngle =
steerAngle * seat.Steer
roueAvantDroite.Direction.HingeConstraint.TargetAngle =
steerAngle * seat.Steer
end)
Ce script fait tourner les roues avant d’une voiture quand le joueur tourne à gauche ou à droite avec le clavier (A / D ou Q / D selon ton clavier).
📘 Le code
local seat = script.Parent.VehicleSeat
➡️ On récupère le siège de conduite de la voiture (VehicleSeat). C’est lui qui détecte quand le joueur tourne à gauche ou à droite.
local roueAvantGauche = script.Parent.RoueAvantGauche
local roueAvantDroite = script.Parent.RoueAvantDroite
➡️ On récupère les deux roues avant du véhicule, pour pouvoir les faire pivoter.
RoueAvantGauche = la roue de gauche
RoueAvantDroite = la roue de droite
Ces roues ont chacune une charnière (HingeConstraint) qui permet de les faire tourner.
local steerAngle = 30
➡️ C’est l’angle maximum de rotation des roues (en degrés). Ici : les roues peuvent tourner jusqu’à 30° vers la gauche ou la droite.
➡️ Le script change l’angle cible (TargetAngle) de la charnière des roues avant. 👉 Résultat : quand le joueur tourne, les roues s’inclinent à gauche ou à droite comme une vraie voiture 🚘
🧠 En résumé
Élément
Rôle
VehicleSeat
détecte les touches du joueur
Steer
indique la direction du volant (-1, 0, 1)
HingeConstraint
permet de faire tourner les roues
TargetAngle
angle que doit atteindre la roue
steerAngle
limite maximale de rotation (ici 30°)
🎯 Ce que fait le script
➡️ À chaque fois que le joueur tourne :
Le siège envoie une valeur (Steer)
Le script multiplie cette valeur par 30
Les roues avant tournent de cet angle
💬 En bref :
Quand tu tournes le volant, les roues tournent dans la même direction, comme une vraie voiture
Lance ton jeu pour vérifier le bon fonctionnement de ta direction :
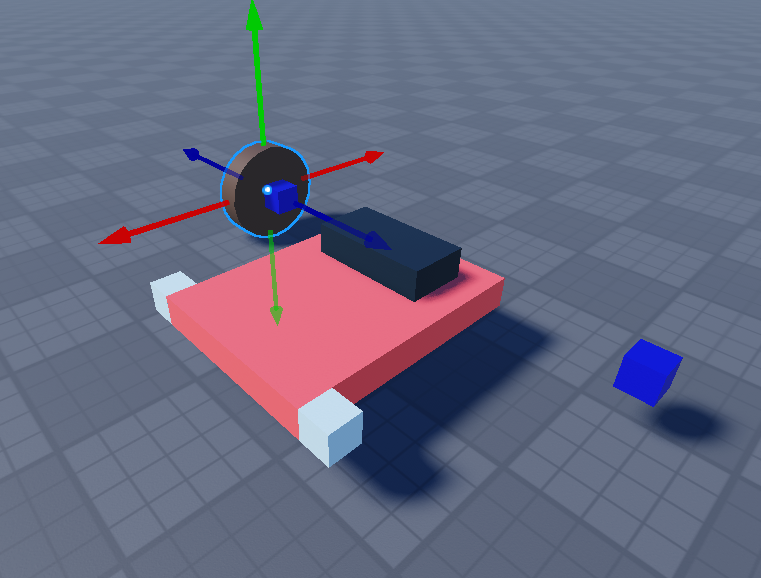
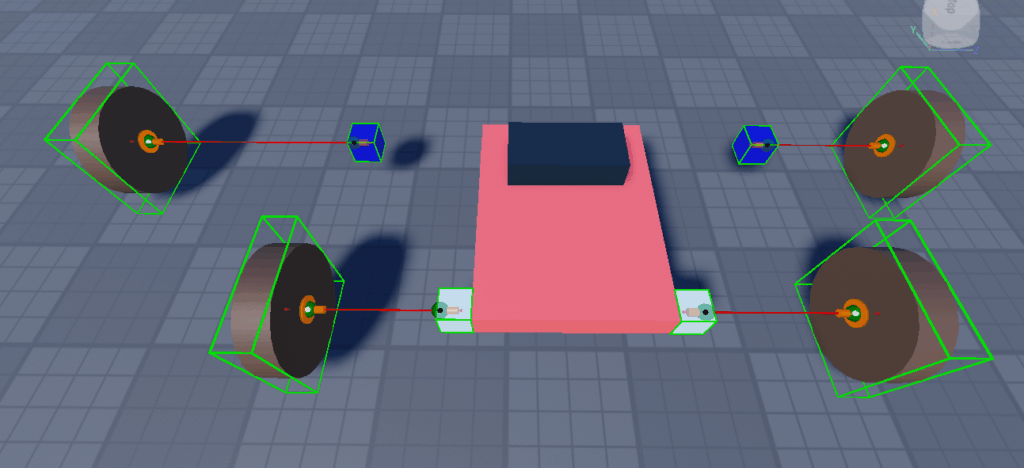
Maintenant nous allons installer les roues.
Crée une roue centrée sur la direction de ta voiture, surélève ton châssis de voiture :
Renomme le part en « roue » :
Duplique en 4 roues :
Place tes 4 roues bien centrées :
Range tes roues dans l’arborescence de ta voiture :
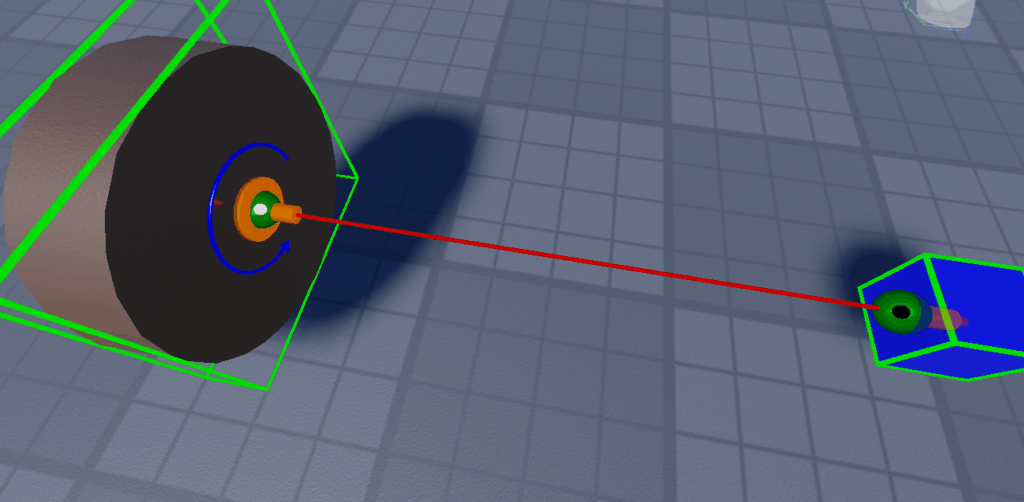
Pour chaque roue positionne une charnière à partir du centre de la roue sur le centre de la direction :
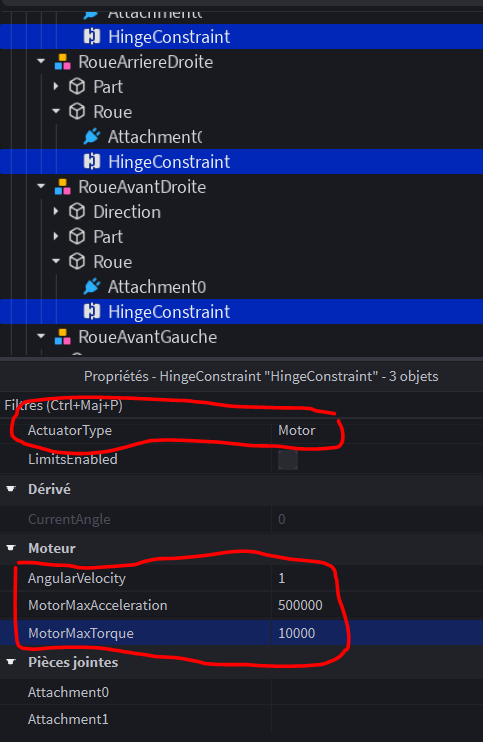
Sélectionne les quatre HingeConstraint des quatre roues et applique ces propriétés :
Qu’est-ce qu’un HingeConstraint ?
Un HingeConstraint (en français : contrainte de charnière) relie deux objets pour qu’ils puissent tourner autour d’un axe, comme une porte sur ses gonds ou une roue sur son axe.
Sans moteur, il laisse juste la pièce tourner librement. Avec un Motor, il fait tourner activement la pièce tout seul.
Quand ActuatorType = Motor
Alors le HingeConstraint se comporte comme un moteur qui fait tourner la pièce en continu 🌀
Les propriétés les plus importantes sont :
Propriété
Rôle
AngularVelocity
vitesse de rotation de la pièce (en radians/s)
MotorMaxTorque
force maximum du moteur (plus elle est grande, plus il peut pousser)
AngularResponsiveness
vitesse à laquelle le moteur s’adapte aux changements (réactivité)
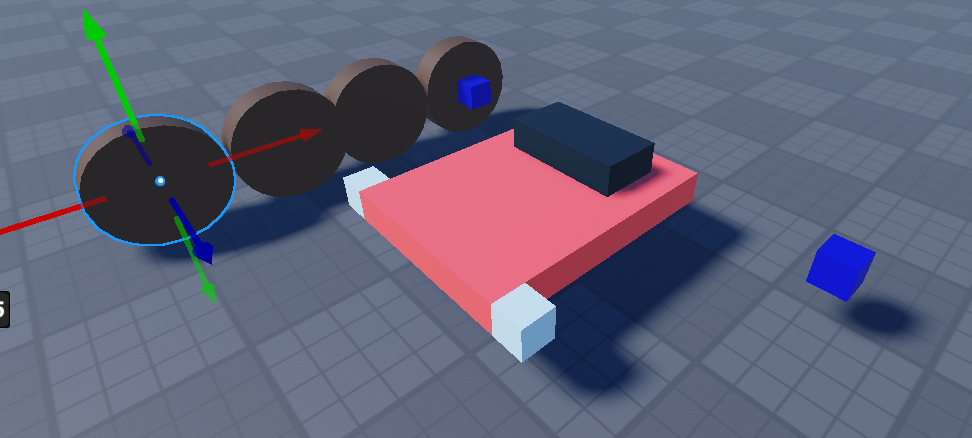
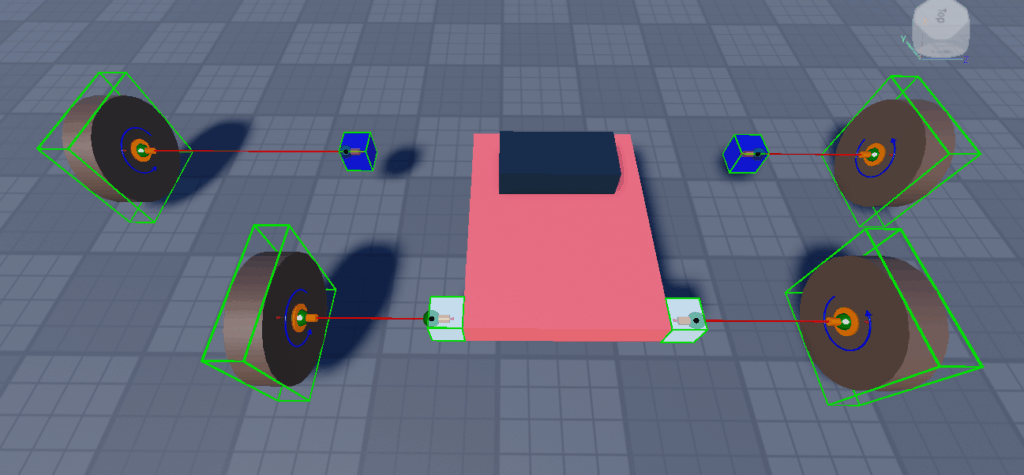
Vérifie le sens de rotation :
Tu remarques que le sens gauche est inverse de celui du sens droit.
Vérifie le bon fonctionnement de la direction :
Modifie ton script :
local seat = script.Parent.VehicleSeat
local roueAvantGauche = script.Parent.RoueAvantGauche
local roueAvantDroite = script.Parent.RoueAvantDroite
local roueArriereGauche = script.Parent.RoueArriereGauche
local roueArriereDroite = script.Parent.RoueArriereDroite
local steerAngle = 30
local speed = 60
seat:GetPropertyChangedSignal("Steer"):Connect(function()
print("Steer =", seat.Steer)
roueAvantGauche.Direction.HingeConstraint.TargetAngle =
steerAngle * seat.Steer
roueAvantDroite.Direction.HingeConstraint.TargetAngle =
steerAngle * seat.Steer
end)
seat:GetPropertyChangedSignal("Throttle"):Connect(function()
print("Throttle =", seat.Throttle)
roueAvantGauche.Roue.HingeConstraint.AngularVelocity = speed * seat.Throttle
roueAvantDroite.Roue.HingeConstraint.AngularVelocity = speed * -seat.Throttle
roueArriereGauche.Roue.HingeConstraint.AngularVelocity = speed * seat.Throttle
roueArriereDroite.Roue.HingeConstraint.AngularVelocity = speed * -seat.Throttle
end)
Ce script permet de faire tourner les roues d’une voiture quand le joueur accélère ou recule avec le clavier (les touches Z / S ou flèche haut / flèche bas).
🧩 Étape 1 : on récupère les objets importants
local seat = script.Parent.VehicleSeat
➡️ On récupère le siège de conduite de la voiture. C’est lui qui détecte quand le joueur appuie pour avancer ou reculer.
local roueAvantGauche = script.Parent.RoueAvantGauche
local roueAvantDroite = script.Parent.RoueAvantDroite
local roueArriereGauche = script.Parent.RoueArriereGauche
local roueArriereDroite = script.Parent.RoueArriereDroite
➡️ On récupère les 4 roues du véhicule :
2 à l’avant
2 à l’arrière
Chaque roue contient un objet appelé HingeConstraint, une charnière qui permet à la roue de tourner sur elle-même.
🧩 Étape 2 : les réglages de base
local steerAngle = 30
local speed = 60
steerAngle : angle pour tourner (pas utilisé ici, mais utile si on veut tourner les roues plus tard).
speed : vitesse de rotation des roues (plus la valeur est grande, plus la voiture va vite 🚀).
🧩 Étape 3 : détecter quand le joueur accélère ou recule
Chaque roue tourne grâce à sa vitesse angulaire (AngularVelocity), c’est-à-dire la vitesse à laquelle elle tourne autour de son axe.
Mais pourquoi une roue est multipliée par -seat.Throttle ❓ 👉 Parce que les roues droite et gauche sont dans des sens opposés (comme une vraie voiture). Si elles tournaient dans le même sens, la voiture glisserait sur place au lieu d’avancer 😅.
Donc :
les roues de gauche tournent dans un sens,
celles de droite tournent dans le sens inverse, ➡️ ce qui fait avancer la voiture dans la bonne direction 🚗💨