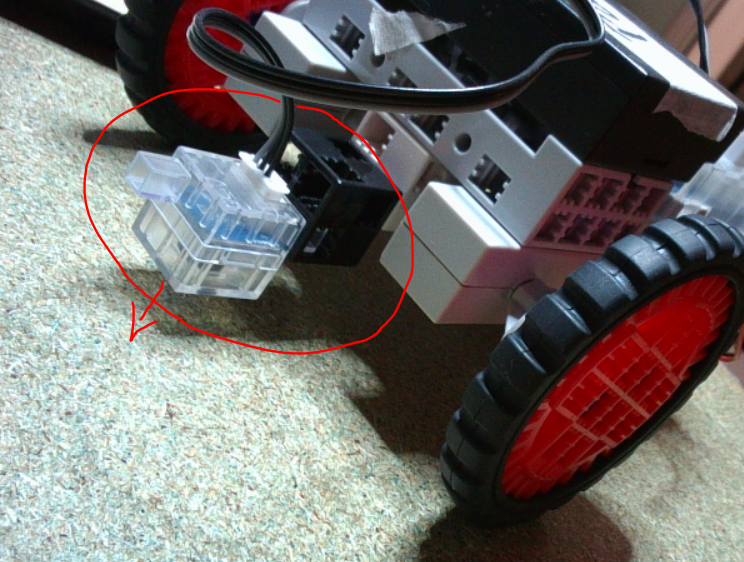
Apprend à utiliser le photo réflecteur IR pour suivre une ligne noire :
Arrêter le robot sur la ligne noire
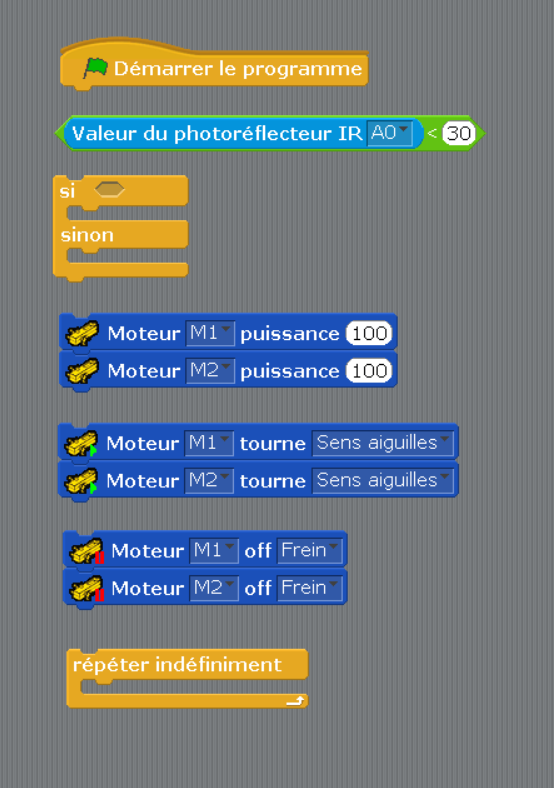
Programme pour que ton robot s’arrête sur la ligne noire :
Utilise ces instructions pour que ton robot avance jusqu’à la ligne noire :
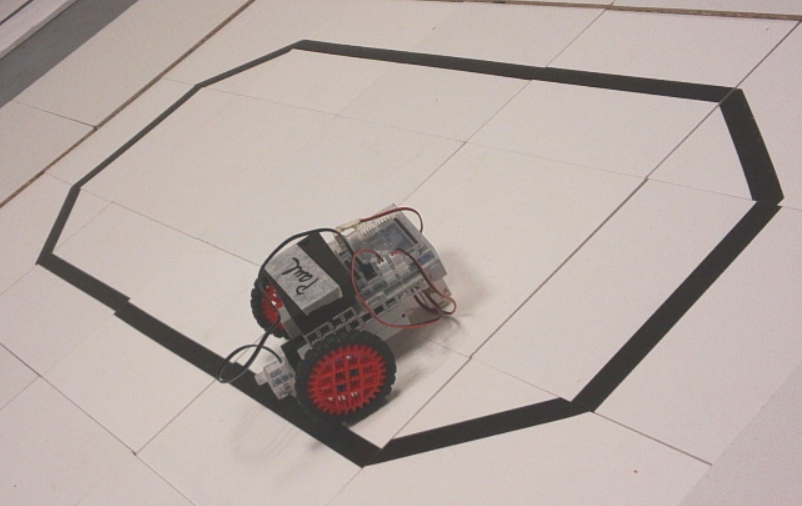
Le robot reste dans le cadre
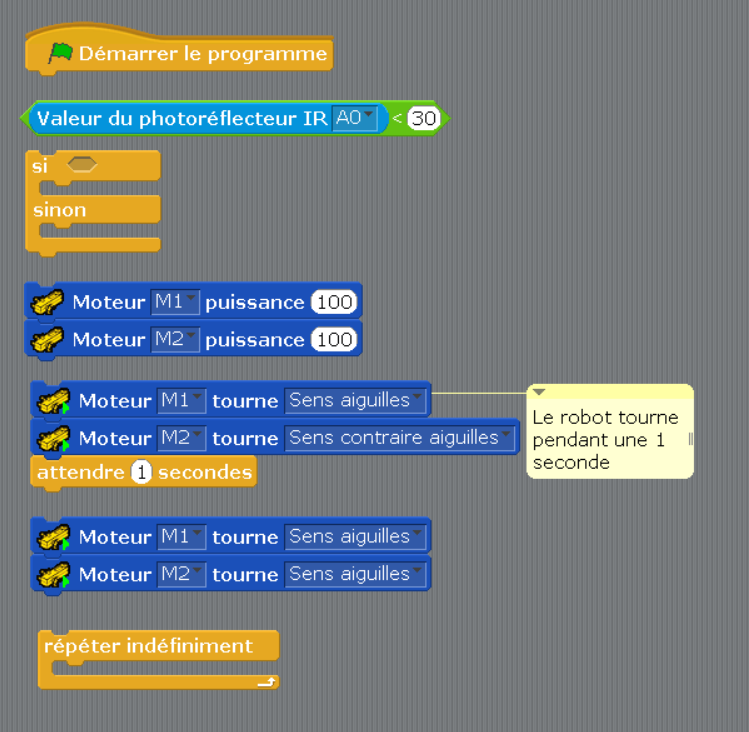
Programme ton robot pour qu’il reste dans le cadre de la ligne noire :
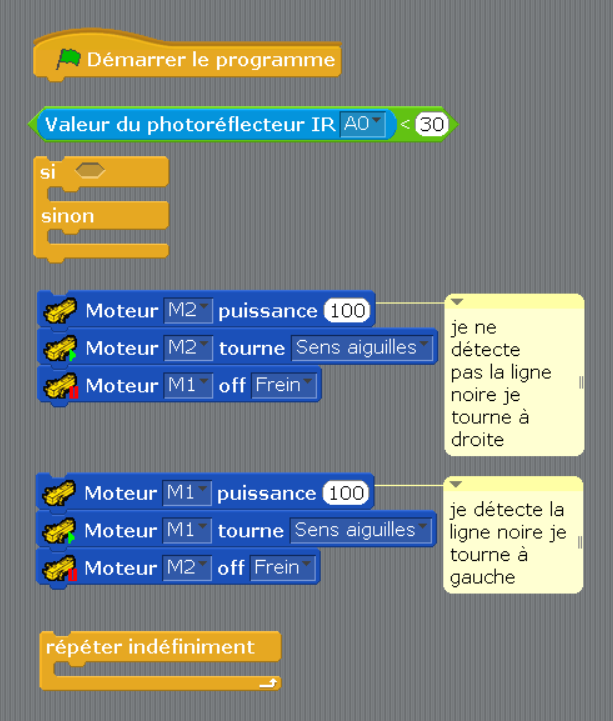
Utilise ces instructions pour que ton robot tourne dès qu’il détecte une ligne noire :
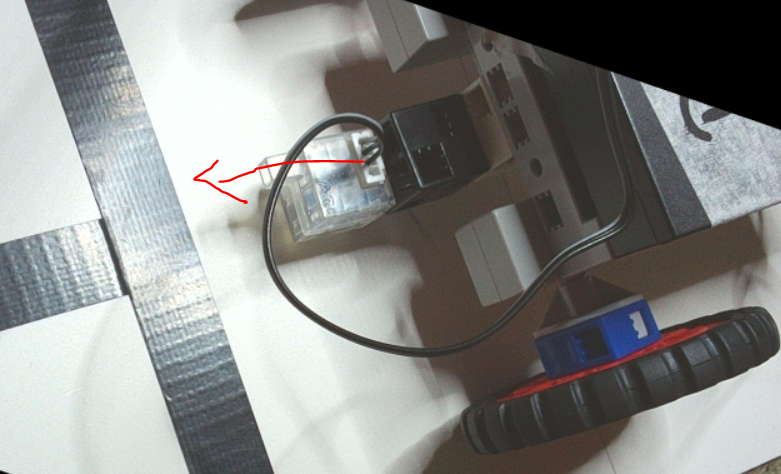
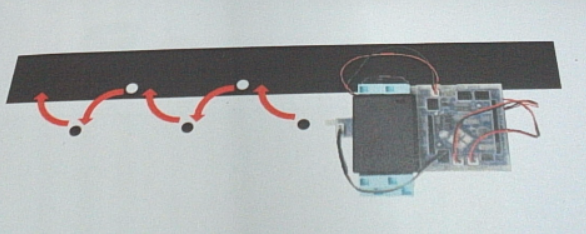
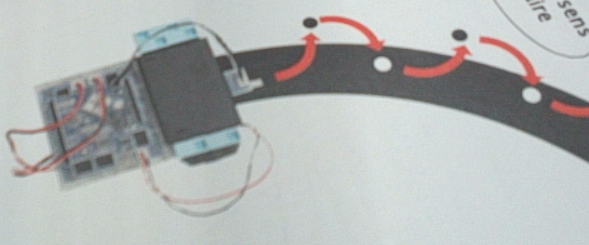
Le robot suit la ligne noire
Programme ton robot pour qu’il suive la ligne noire sur ce principe :
Le robot apprend la couleur noire
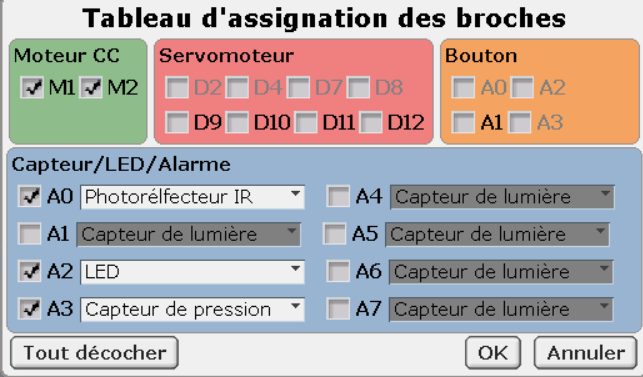
Rajoute à ton robot un capteur de pression et une LED : avant le suivi de ligne, tu poses ton robot sur la ligne noire puis par un appuie sur le capteur de pression, tu demandes au robot de mémoriser la couleur noire.
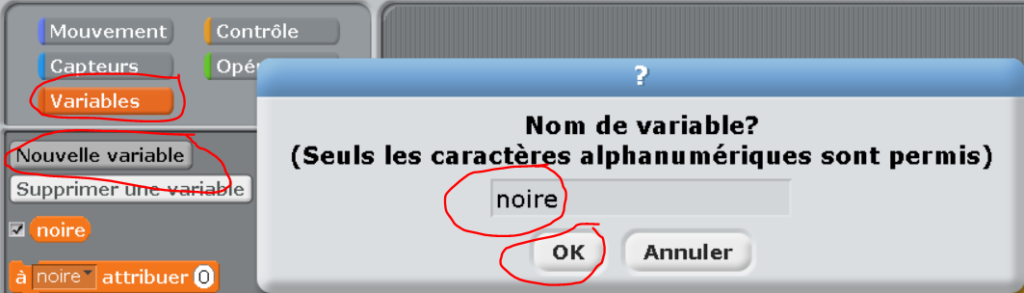
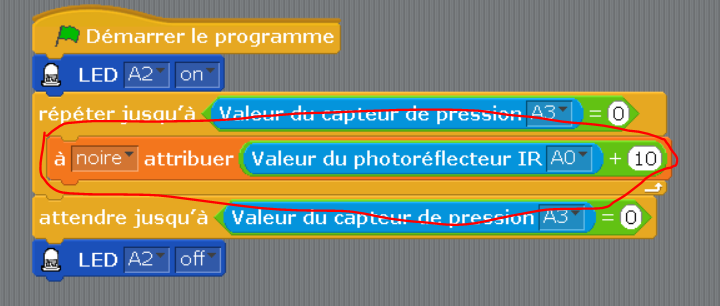
Crée une variable noire pour stocker la valeur retournée par le photo réflecteur lorsque le robot est posé sur la ligne noire :
Puis programme pour mémoriser la valeur retournée par le photo réflecteur dans la variable noire :
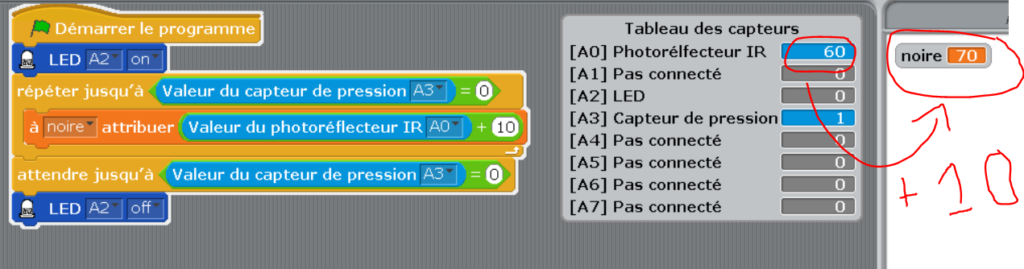
Passe en mode test et constate comment la variable noire change :
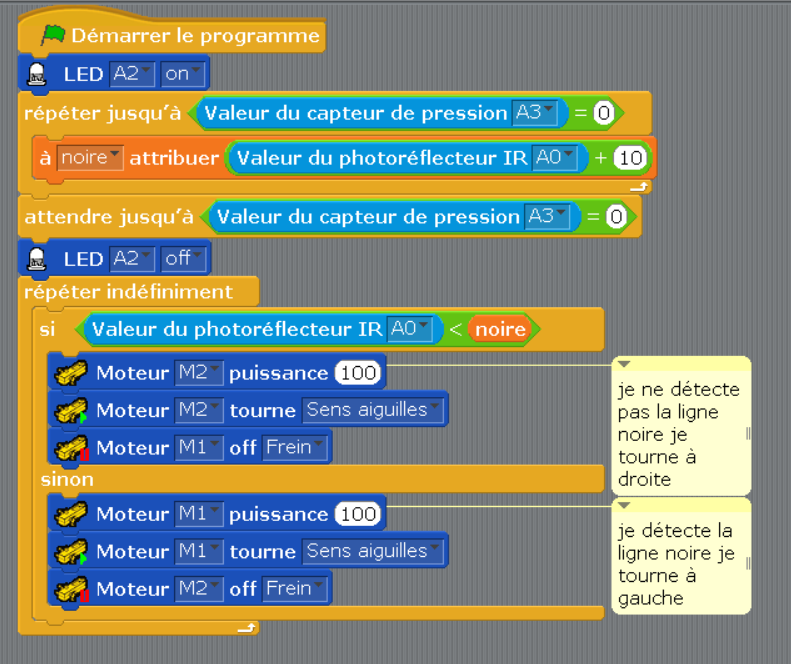
Le programme complet de suivi de ligne :