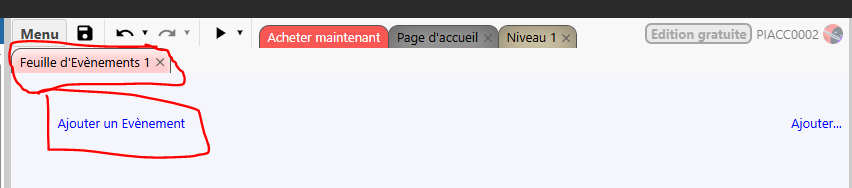
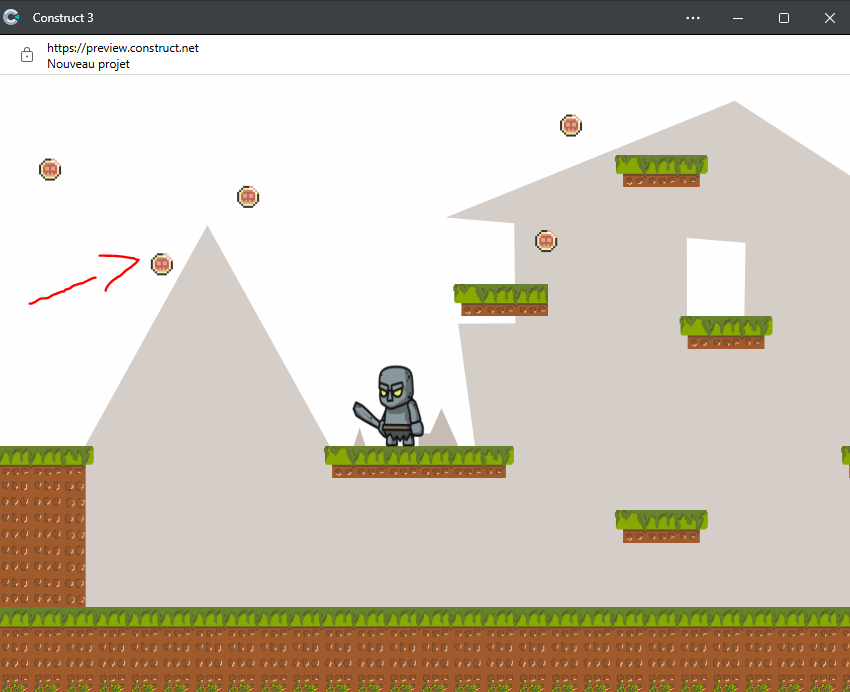
Ajout du joueur
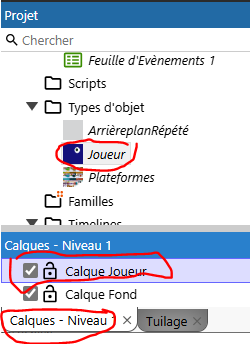
Avant tu vas bloquer le calque de Fond avec le cadenas pour éviter de le modifier puis tu sélectionnes le calque Joueur.
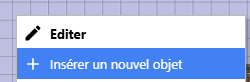
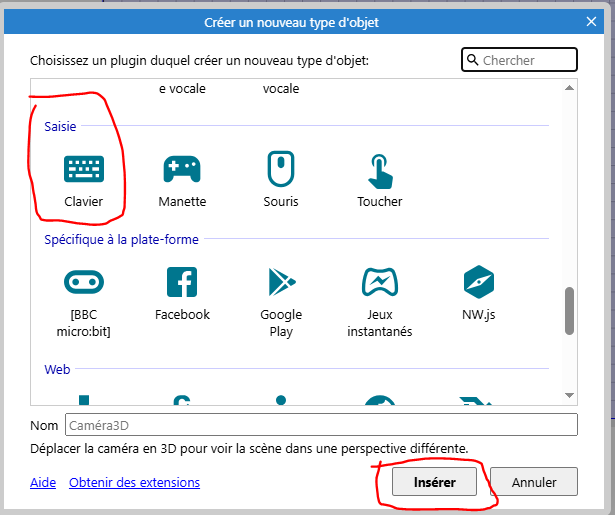
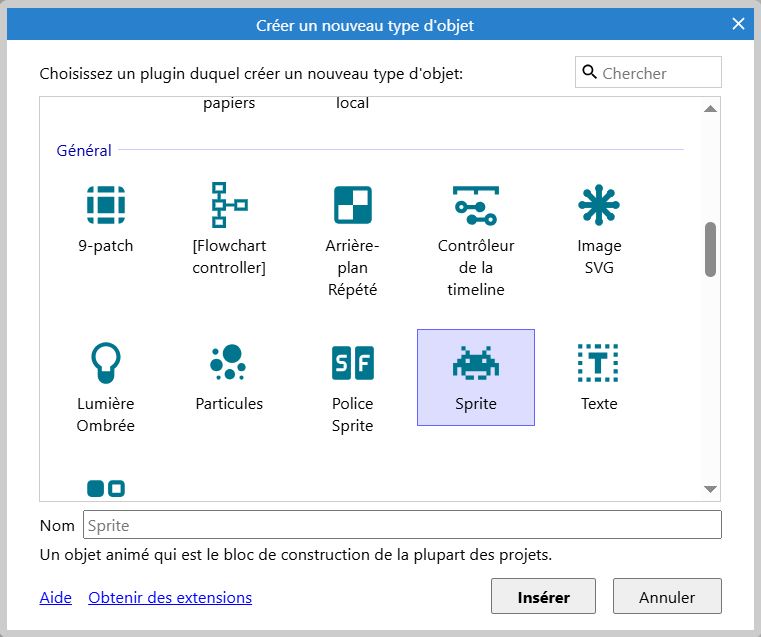
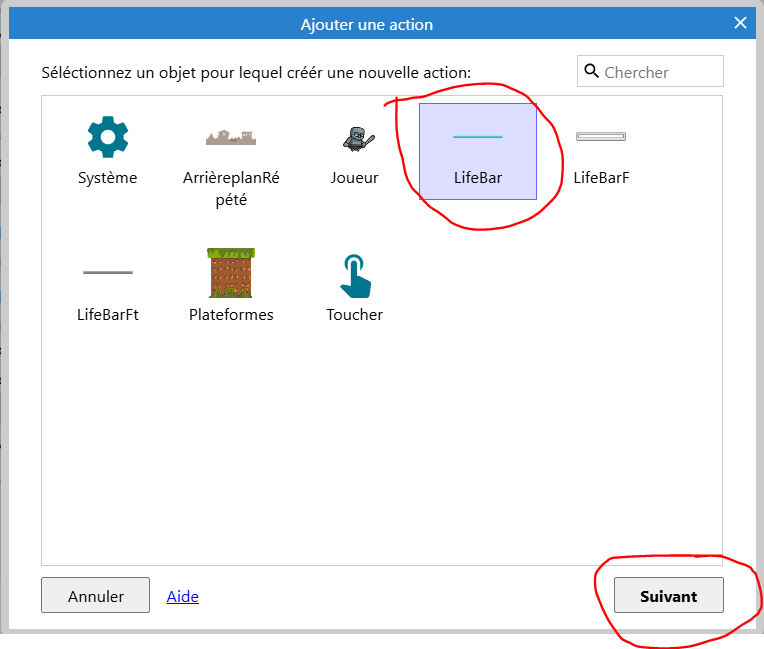
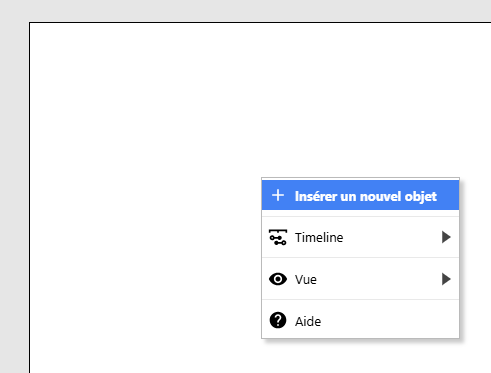
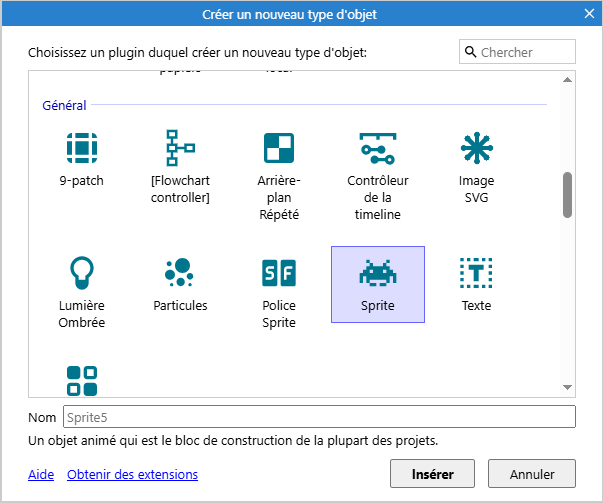
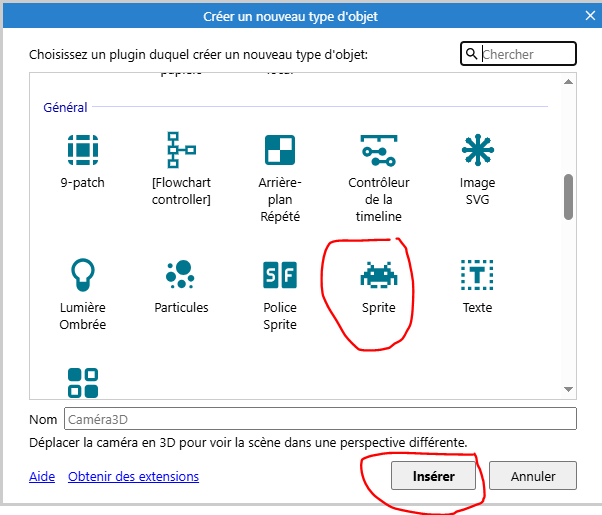
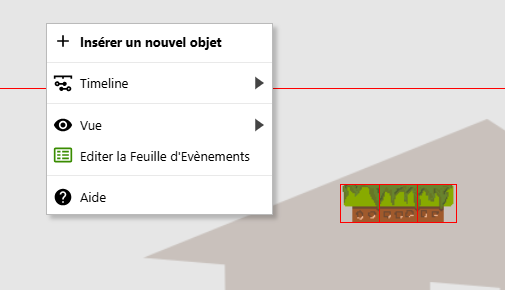
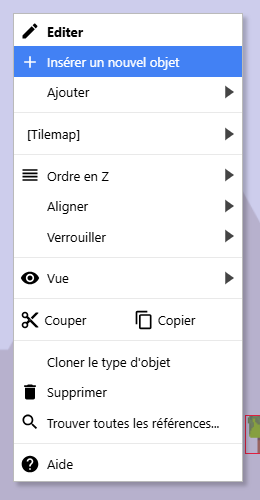
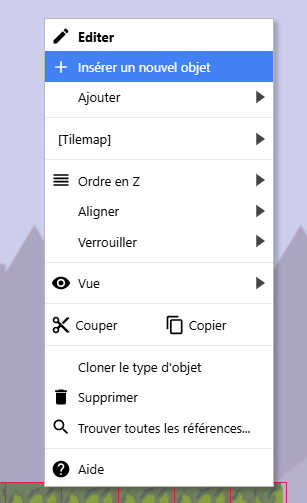
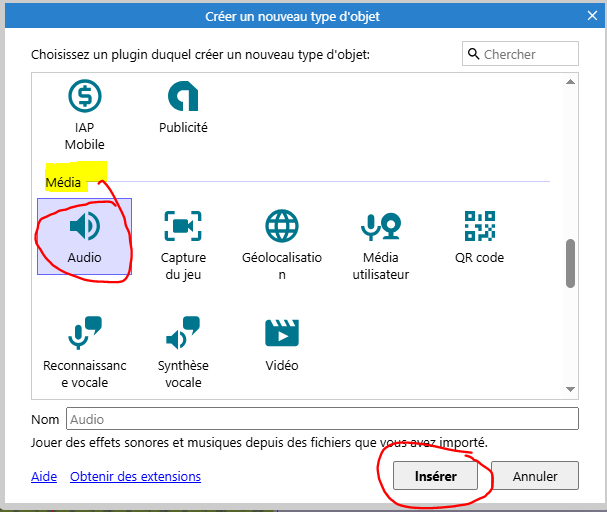
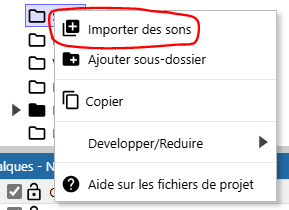
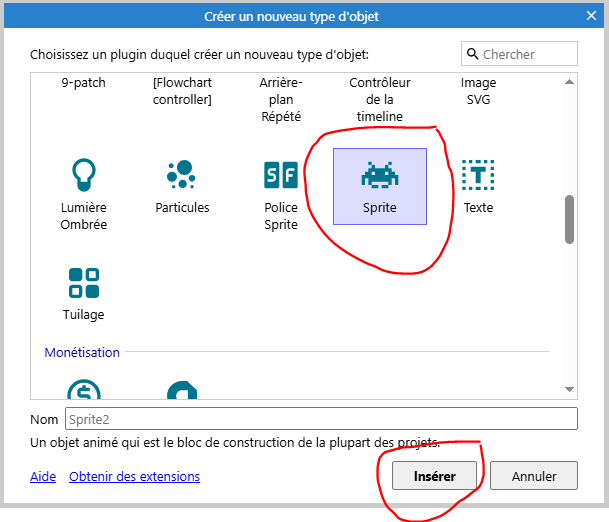
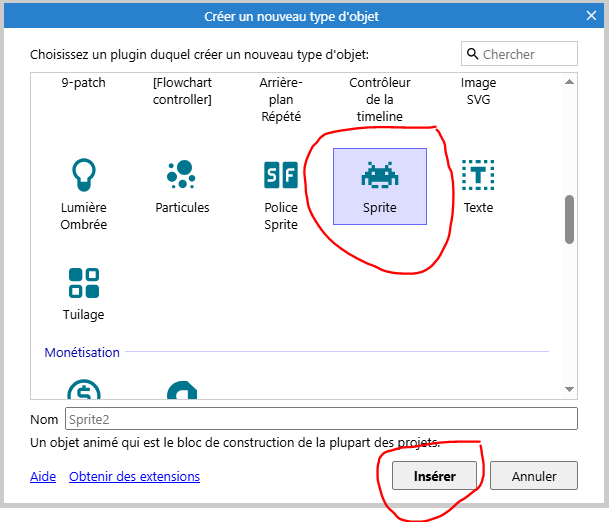
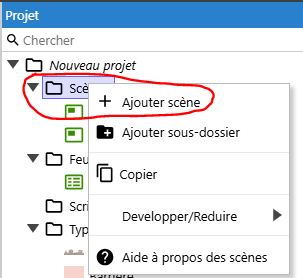
Sur la scène, clic le bouton droit de la souris et choisis Insérer un nouvel objet :
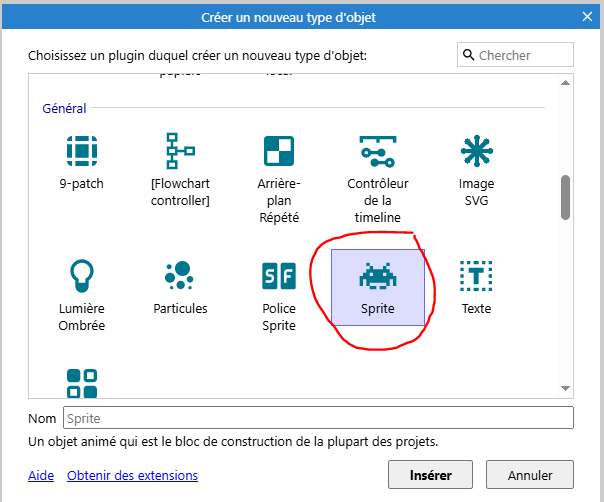
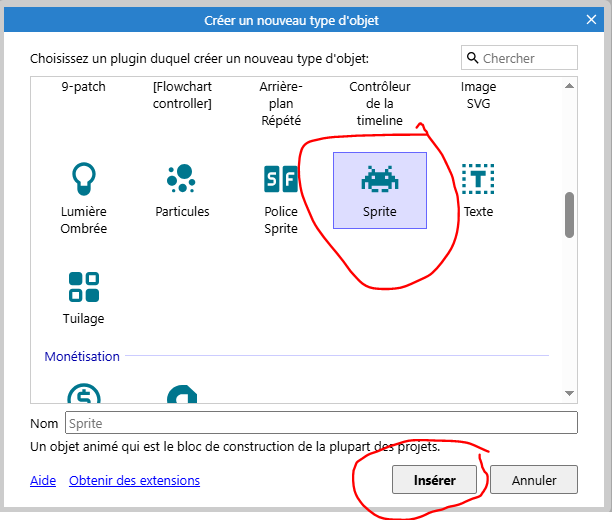
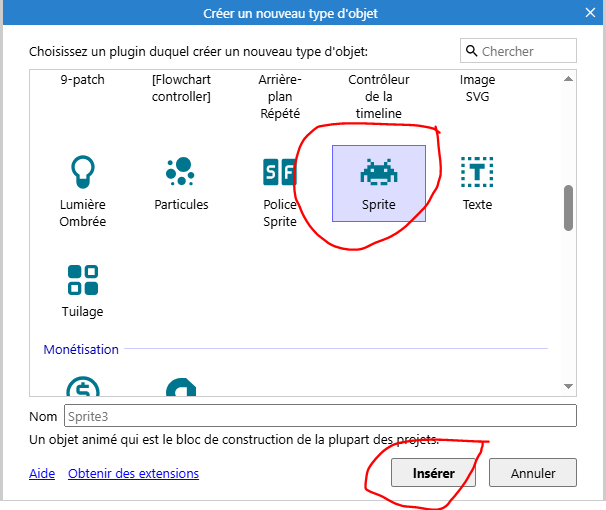
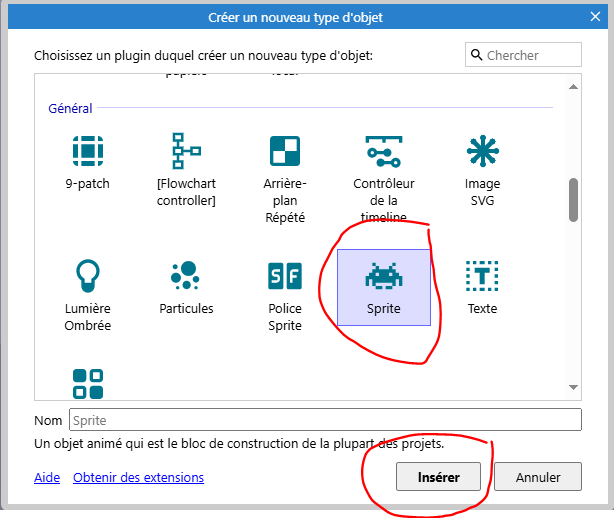
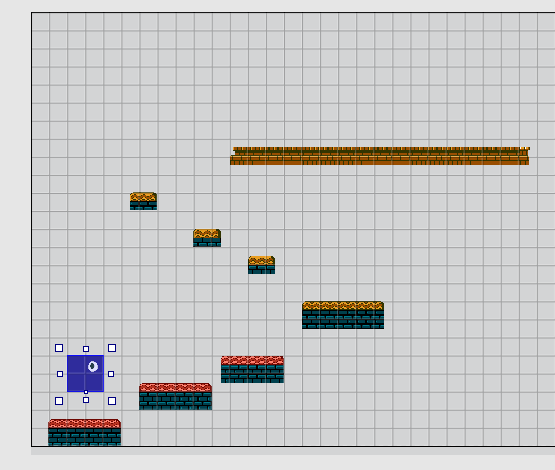
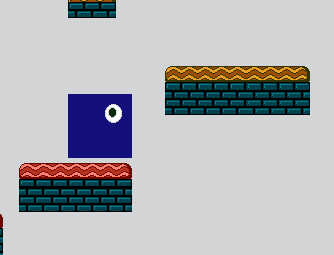
Choisis Sprite puis choisis l’endroit où tu souhaites que le joueur apparaisse avec la croix.
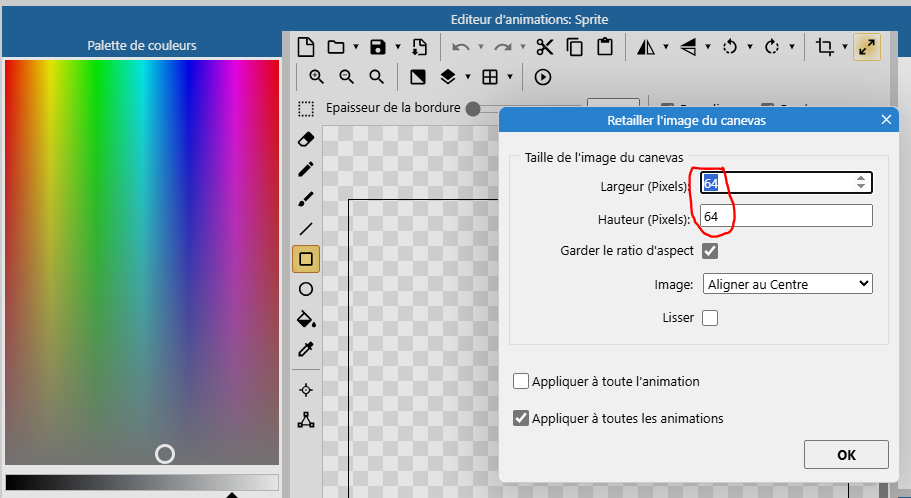
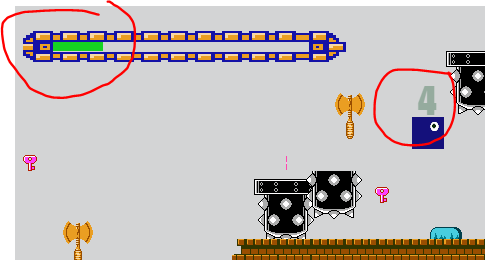
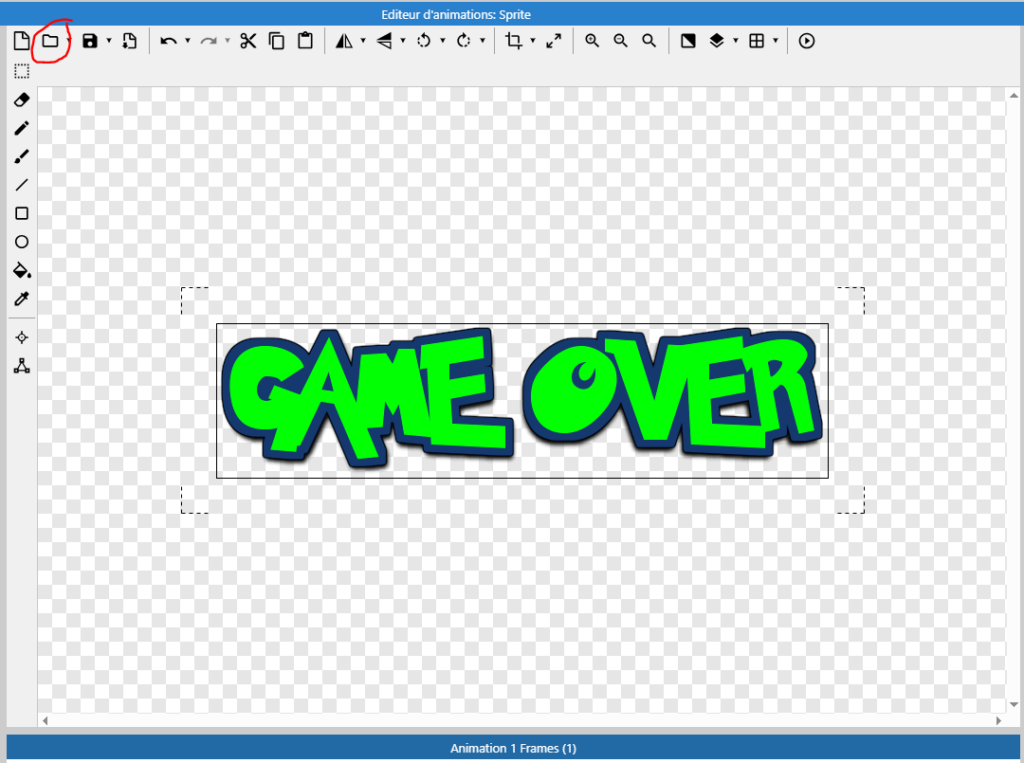
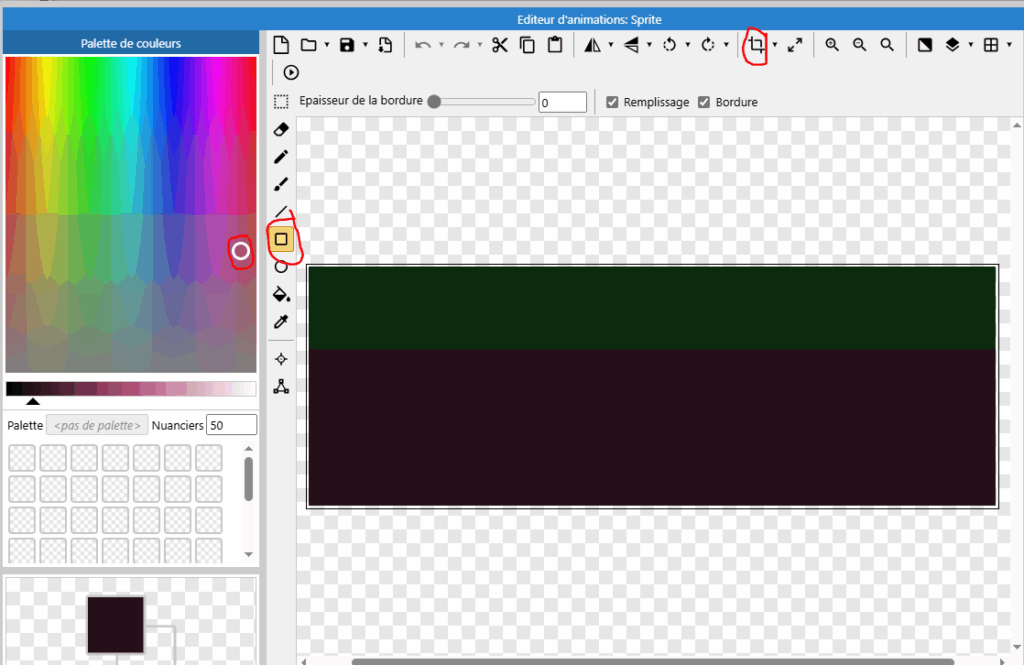
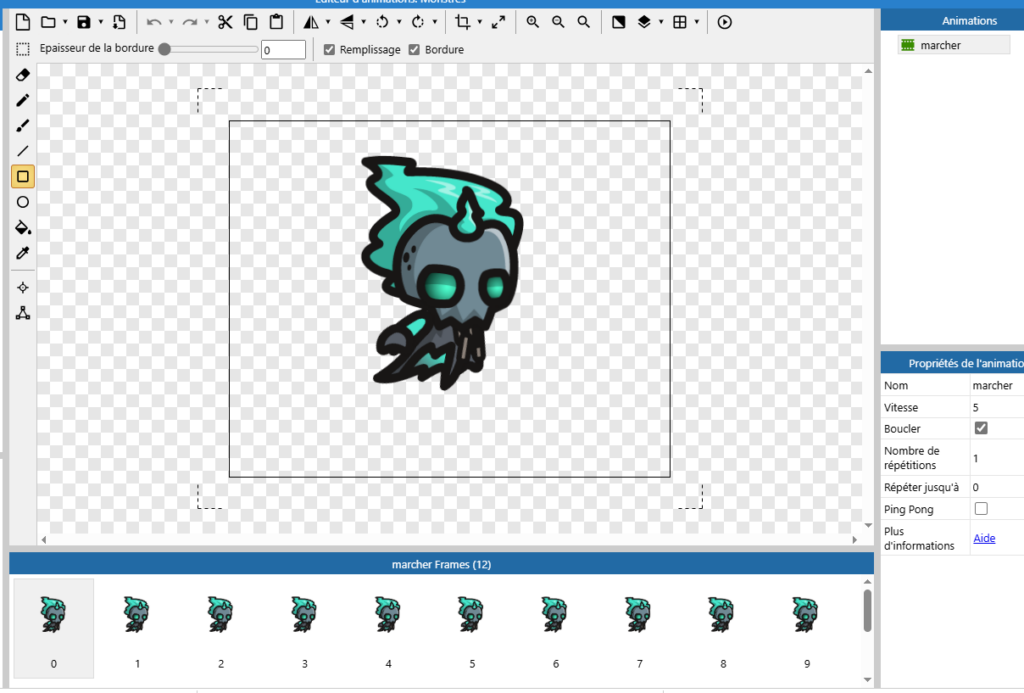
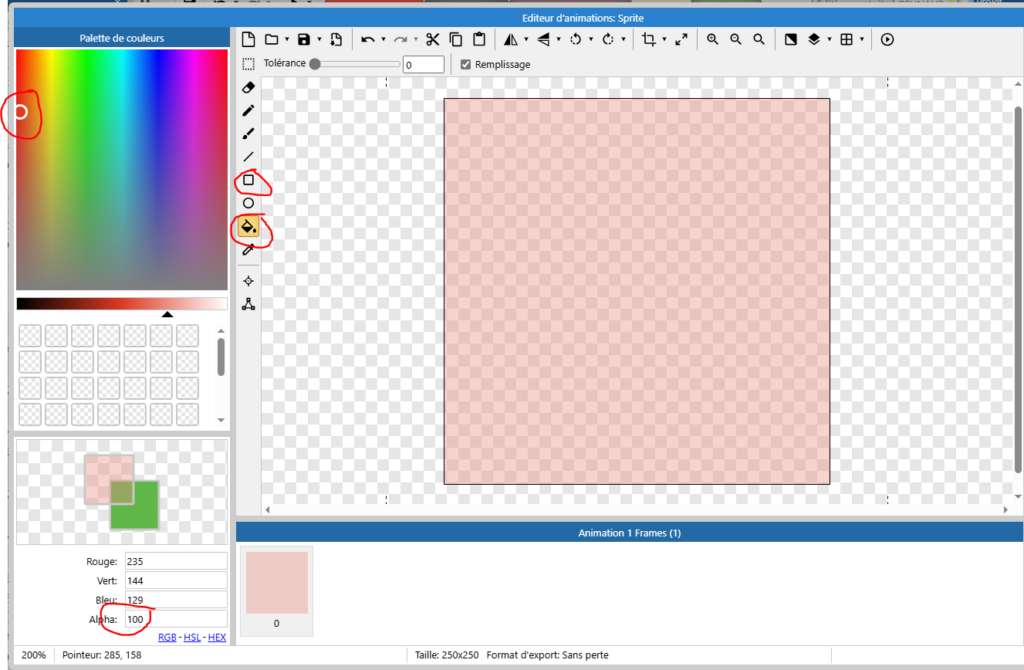
Dessine un personnage simple :
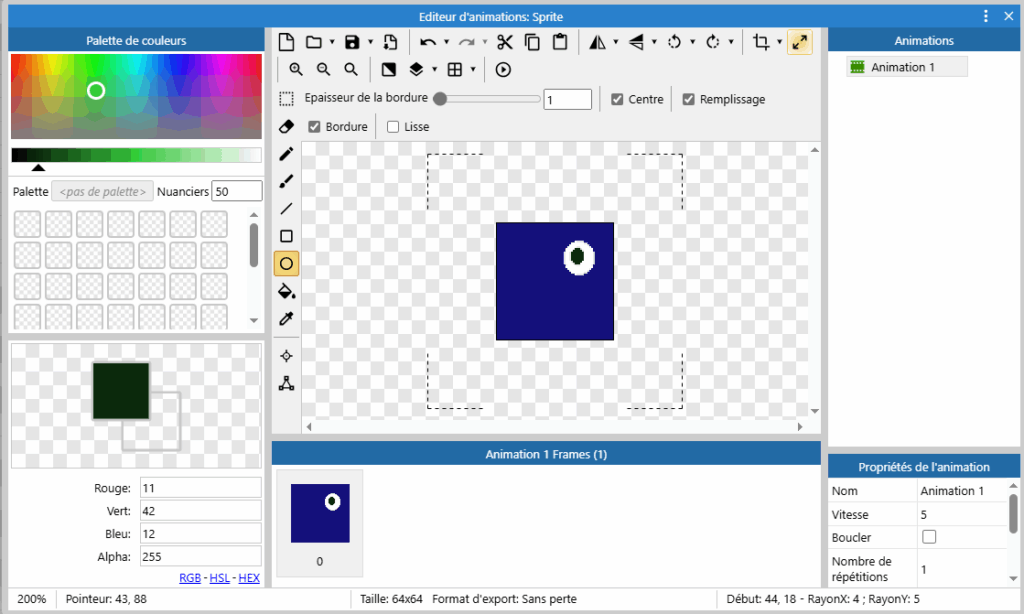
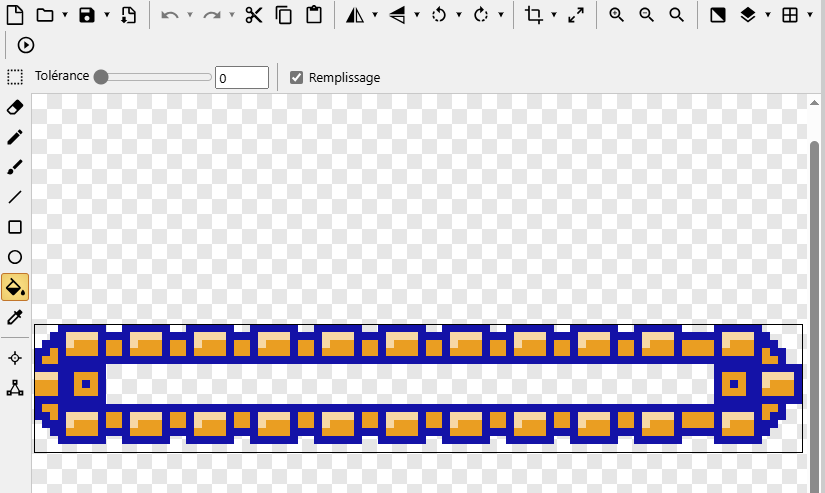
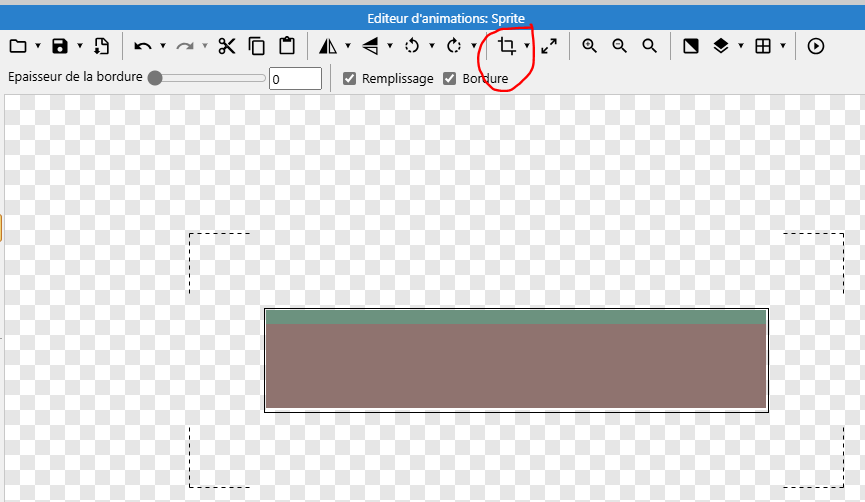
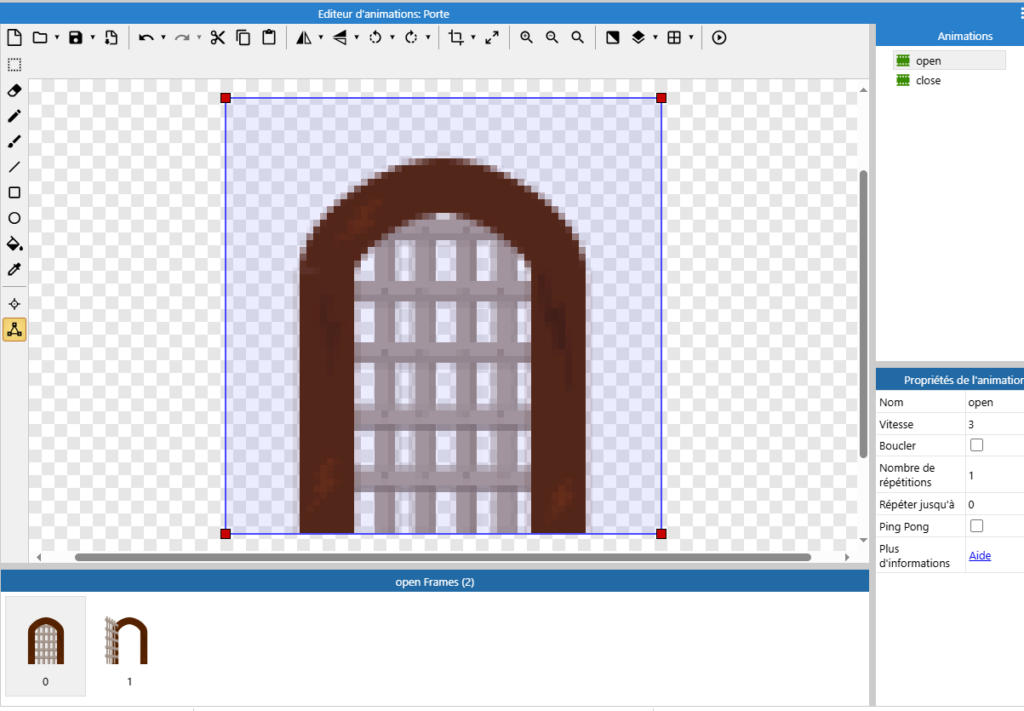
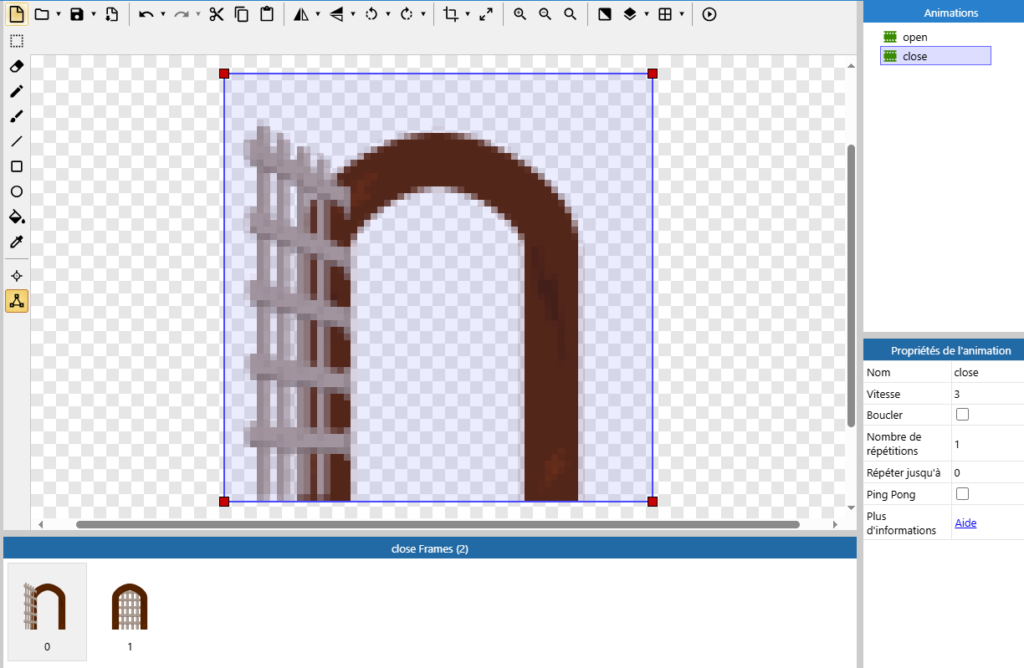
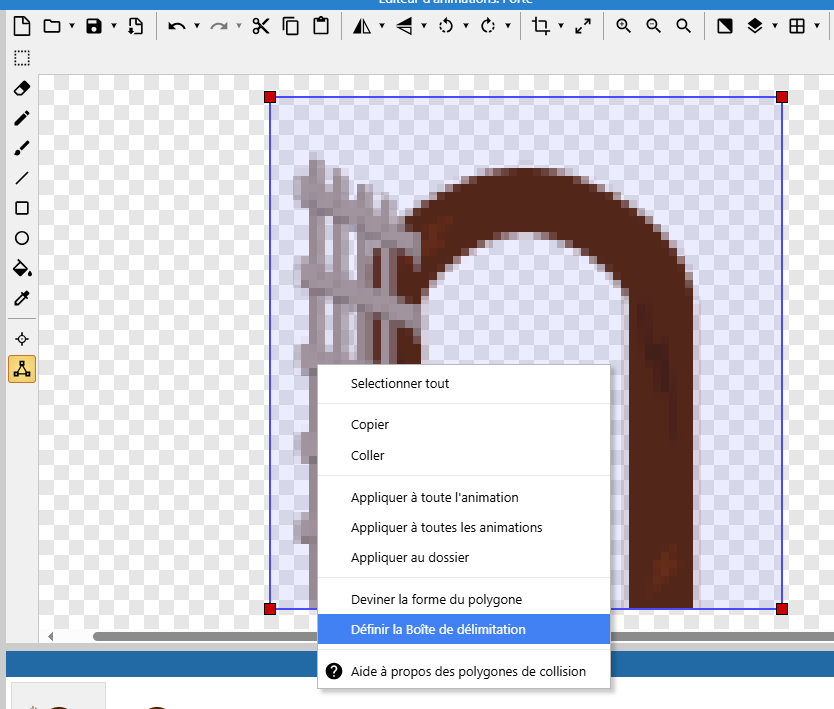
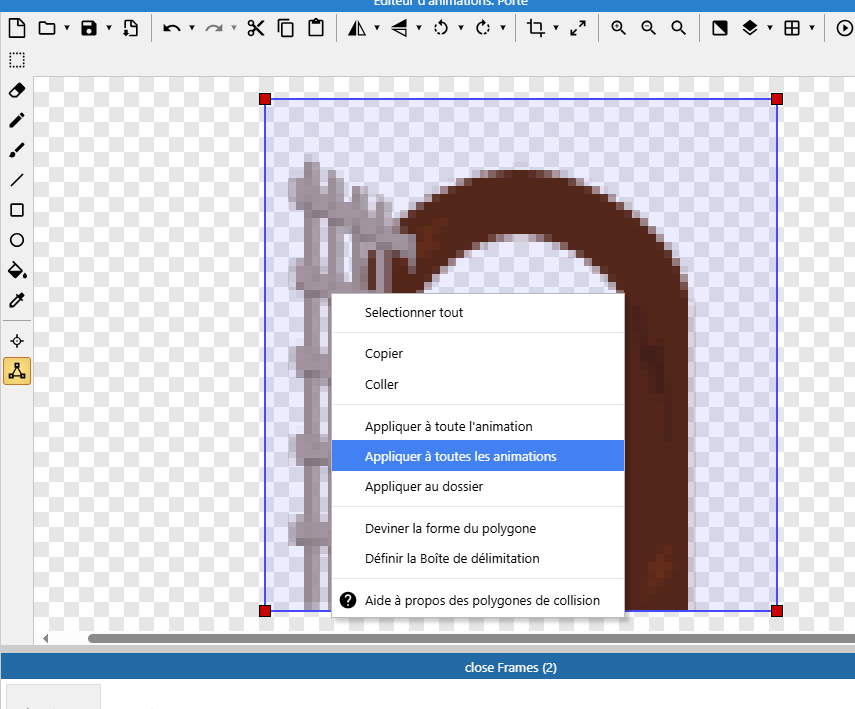
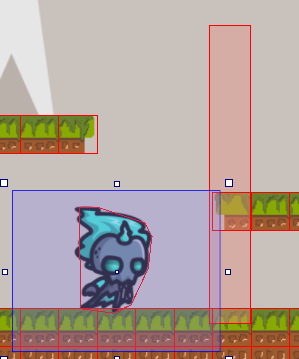
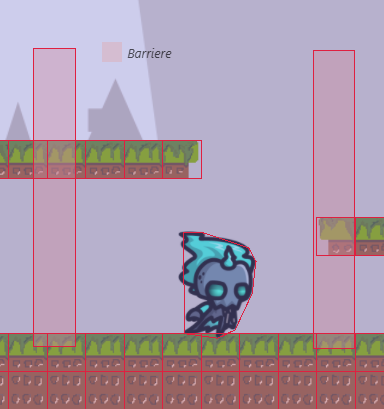
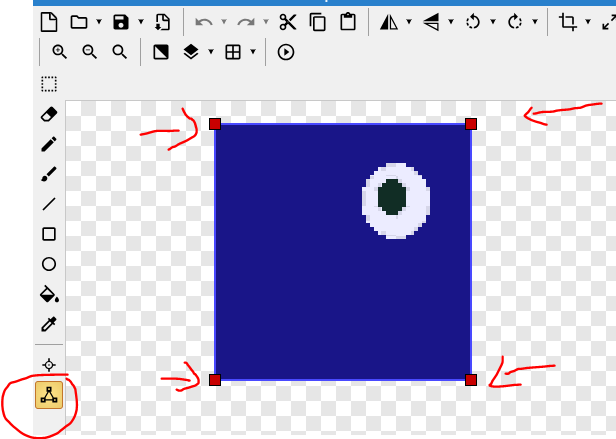
Zones de collision et point d’image
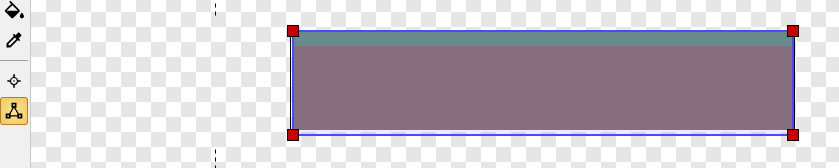
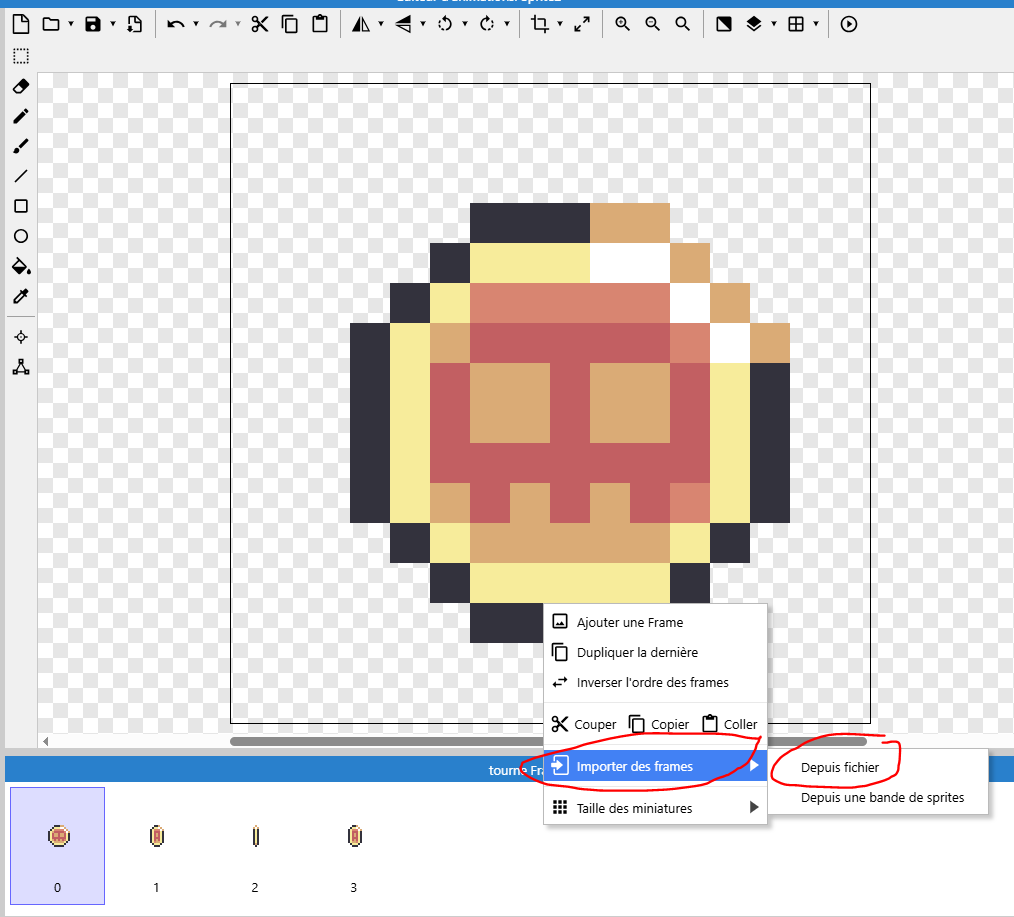
Vérifie les zones de collision de chaque image :
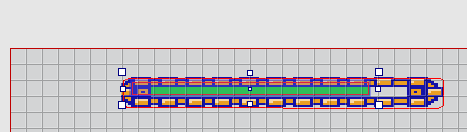
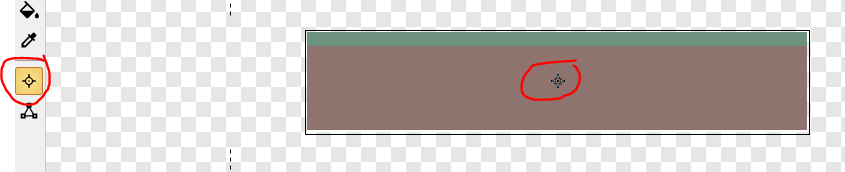
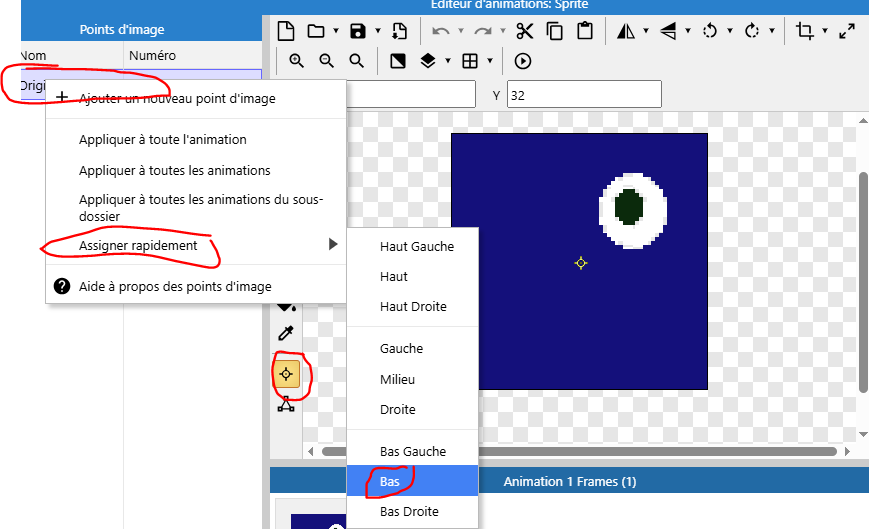
Puis fixe le point d’image en bas au milieu de ton personnage :
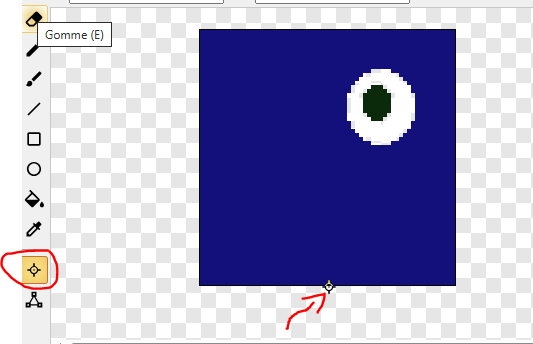
Maintenant, tu peux quitter l’éditeur graphique.
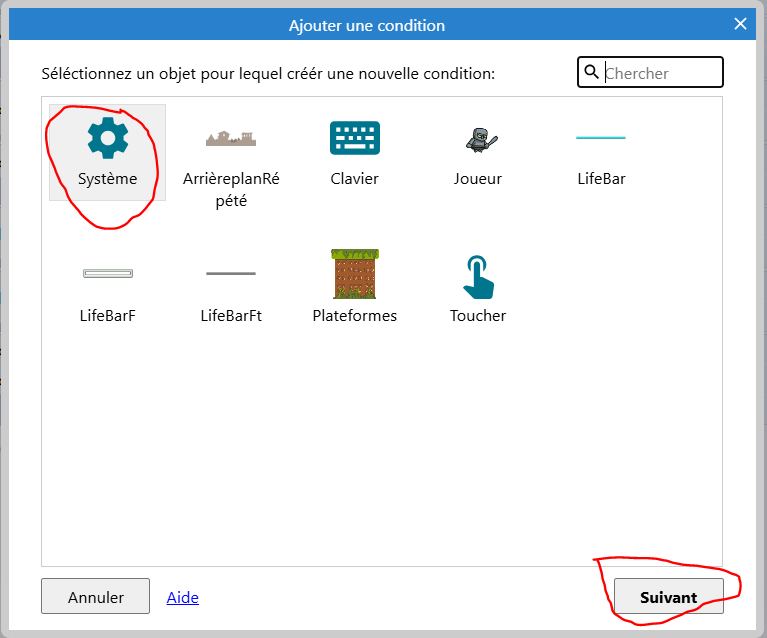
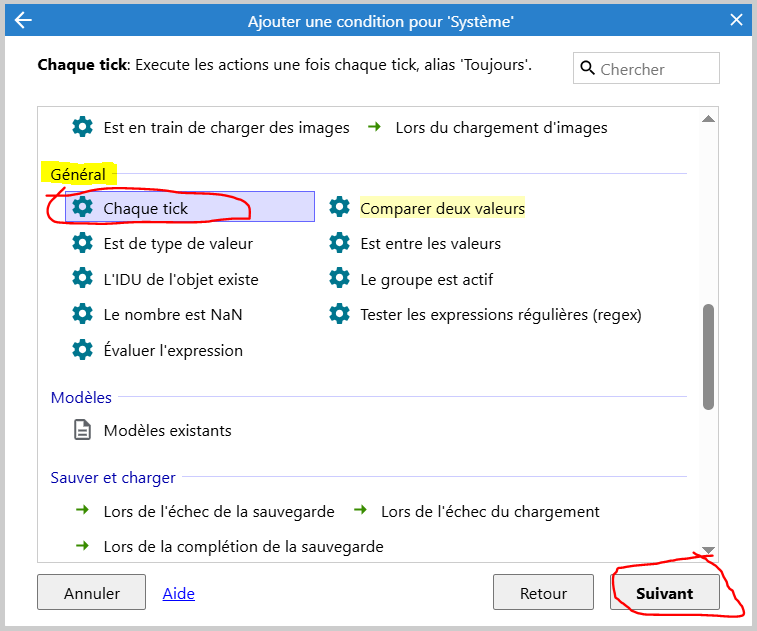
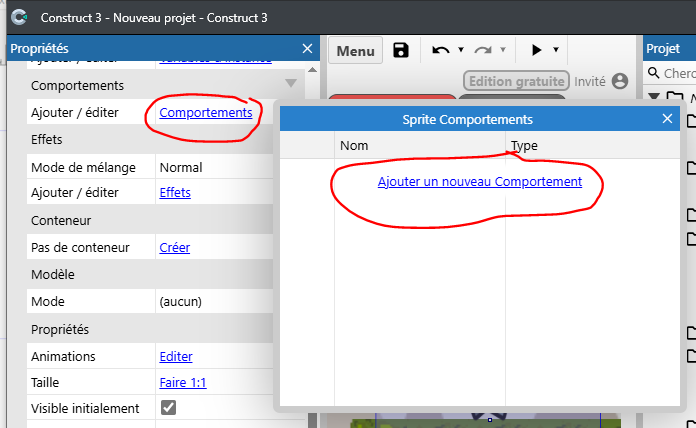
Comportement du joueur
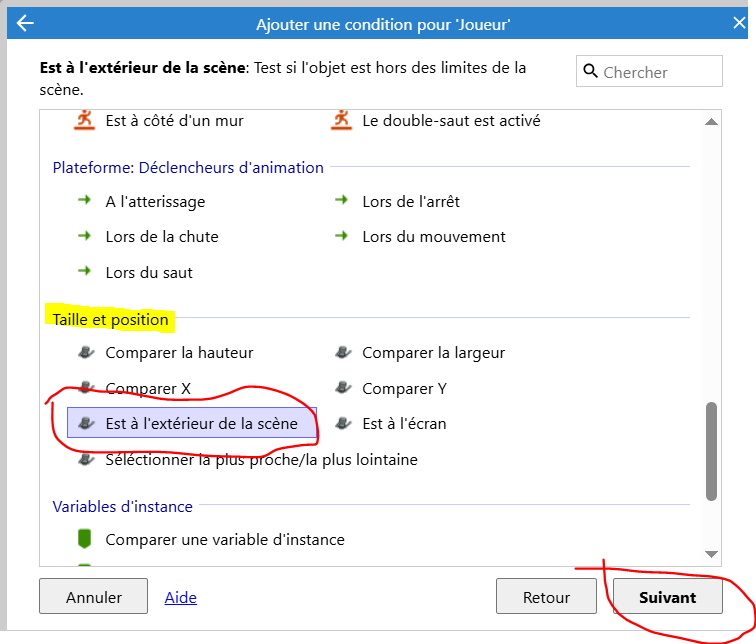
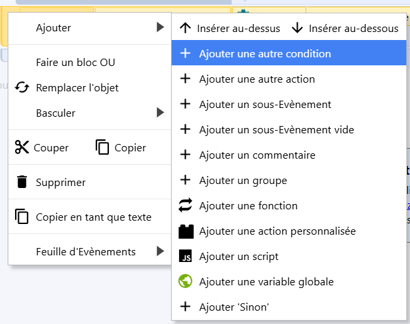
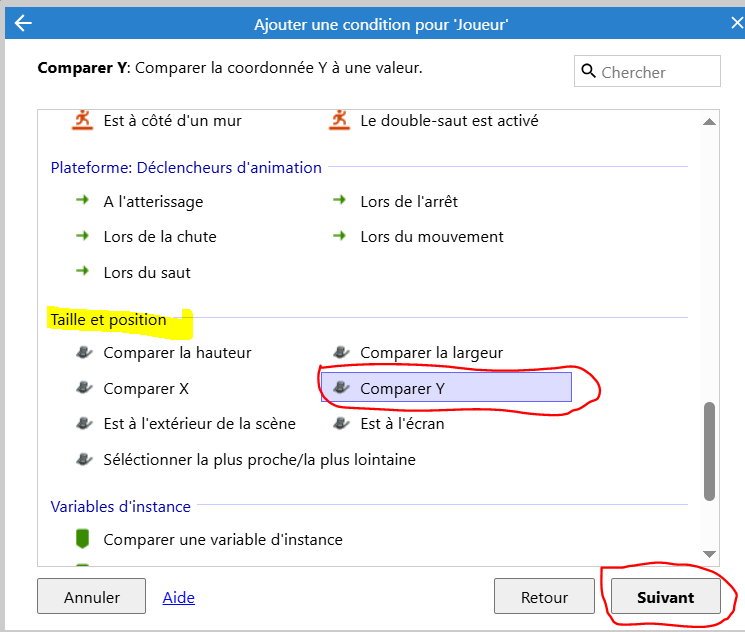
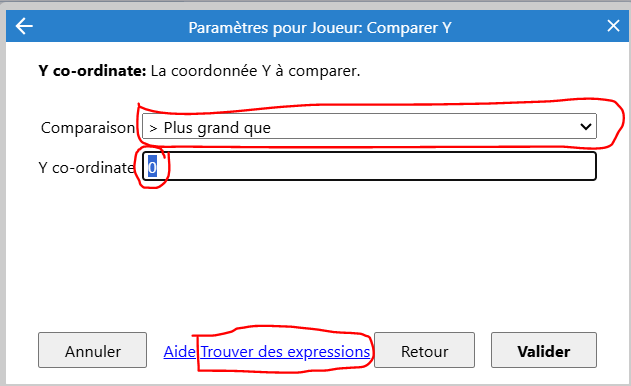
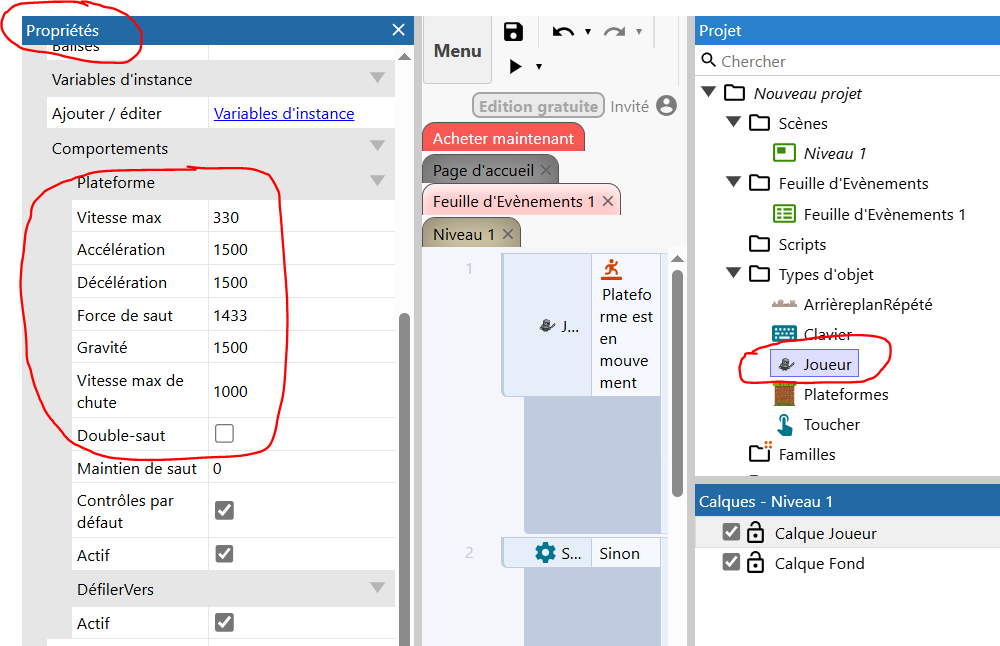
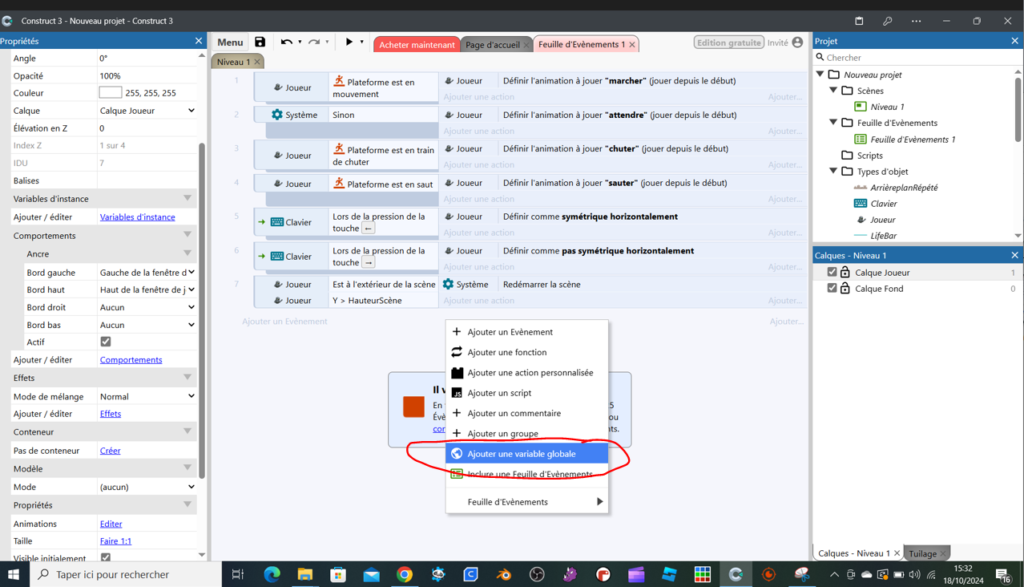
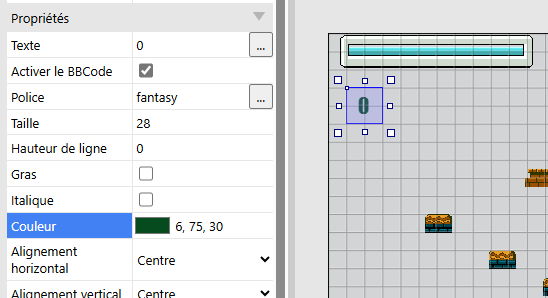
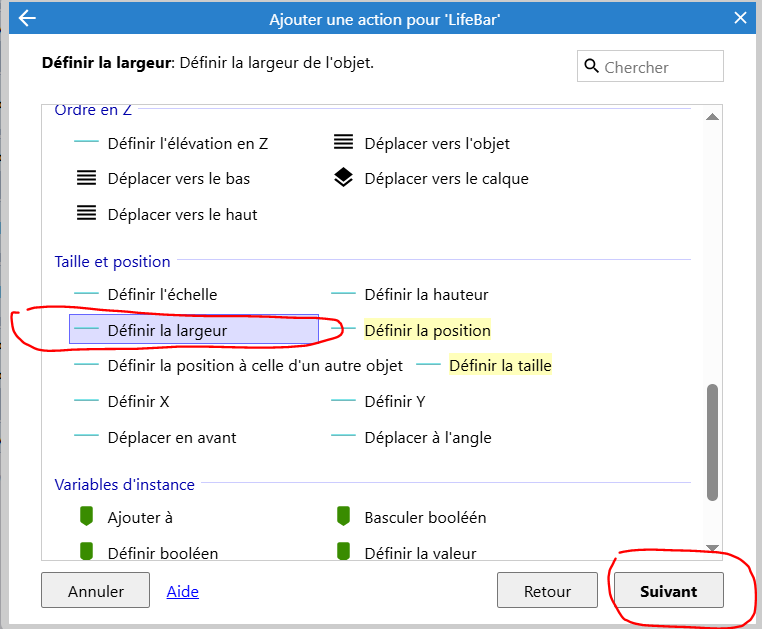
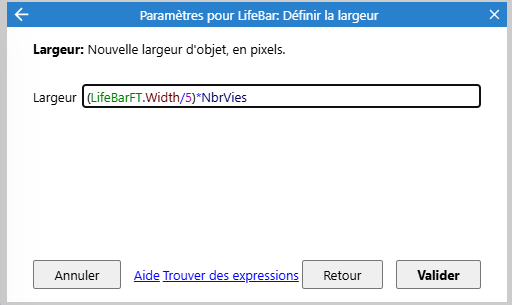
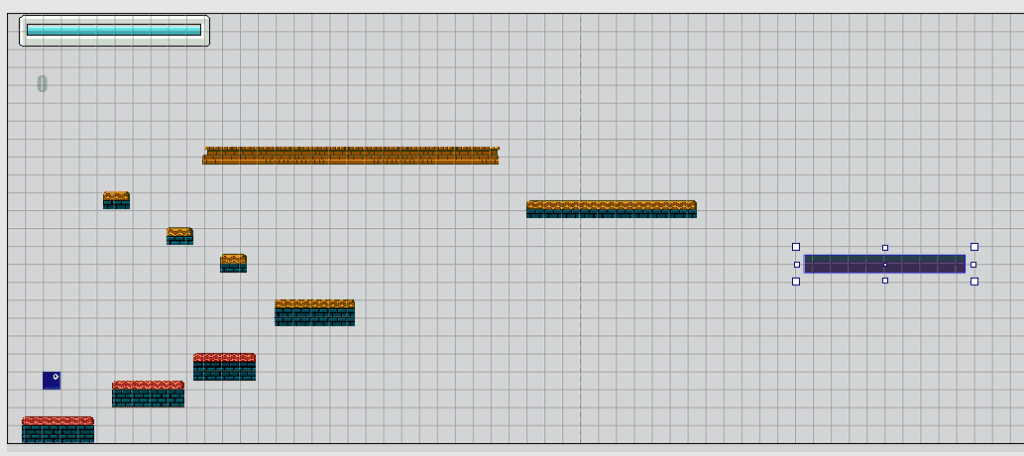
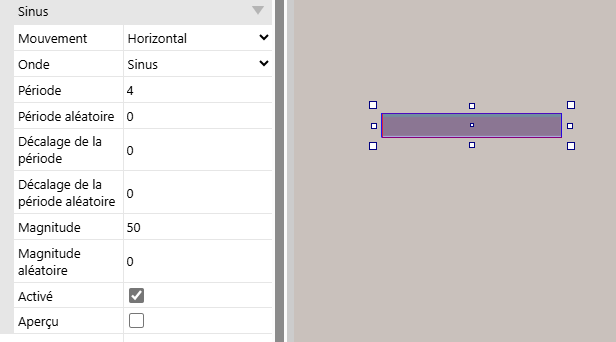
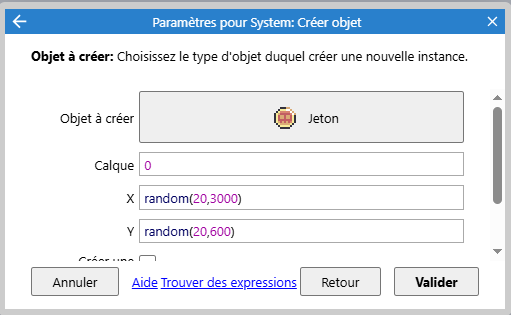
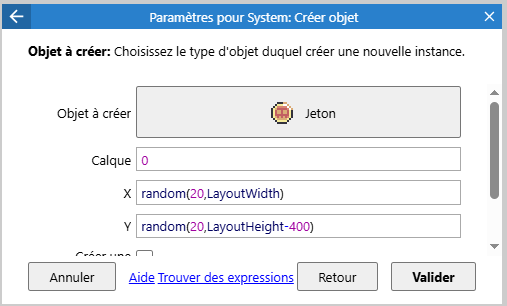
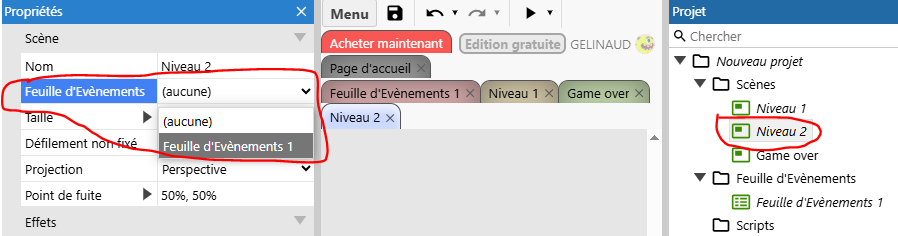
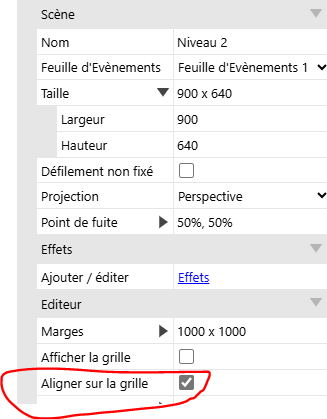
Tu vas définir la position de ton joueur, sa taille et son comportement :
Si tu lances ton jeu, tu constates que ton joueur ne bouge pas

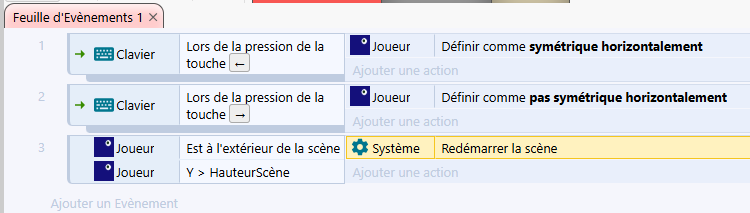
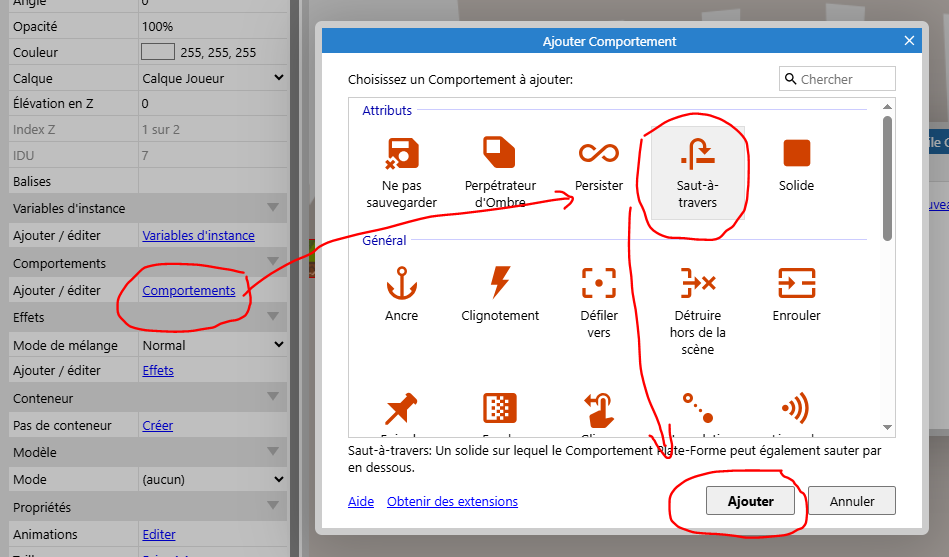
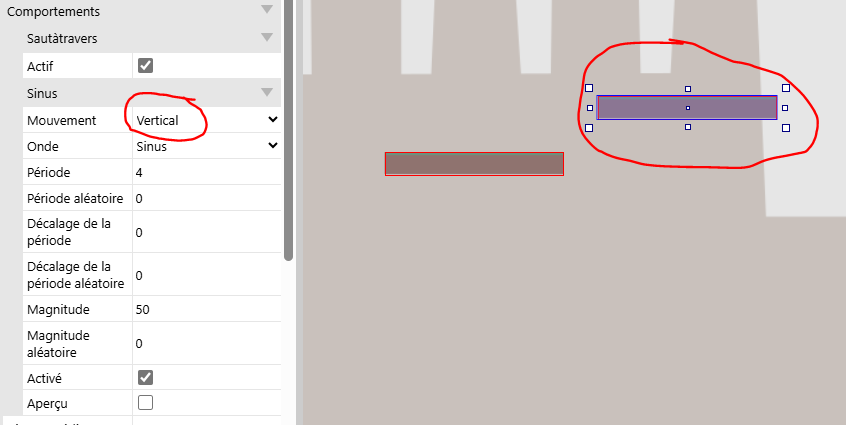
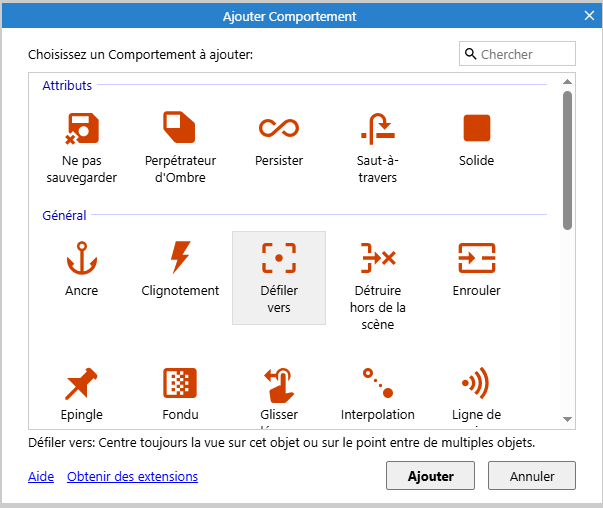
Rajoute un comportement à ton joueur pour qu’il puisse sauter de plateforme en plateforme :
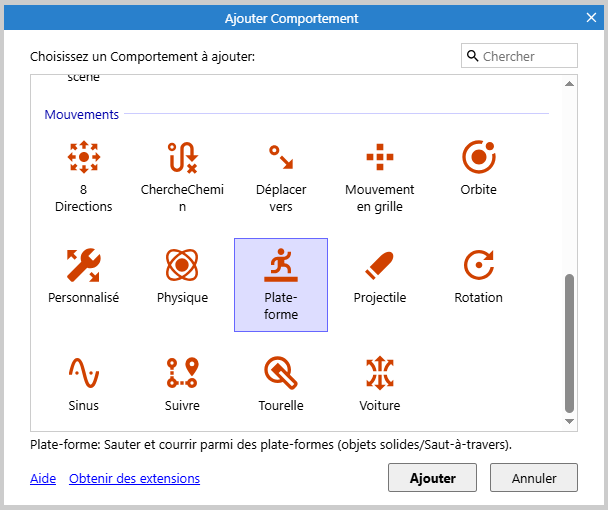
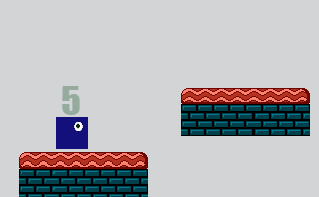
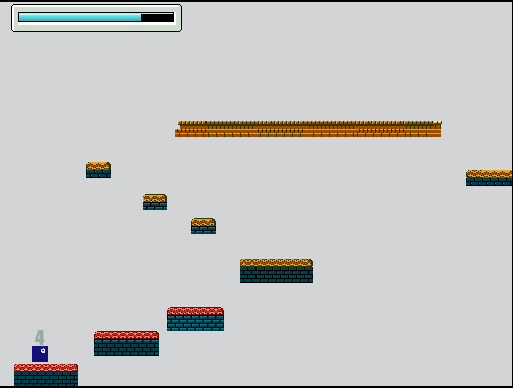
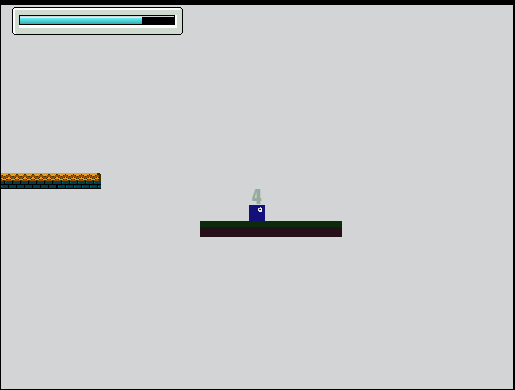
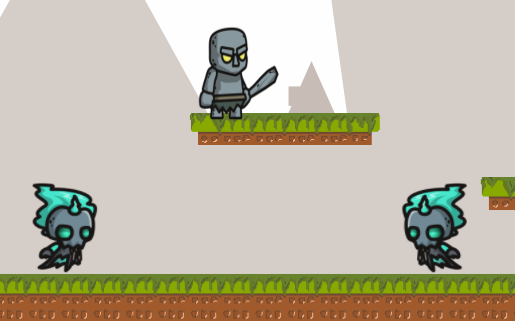
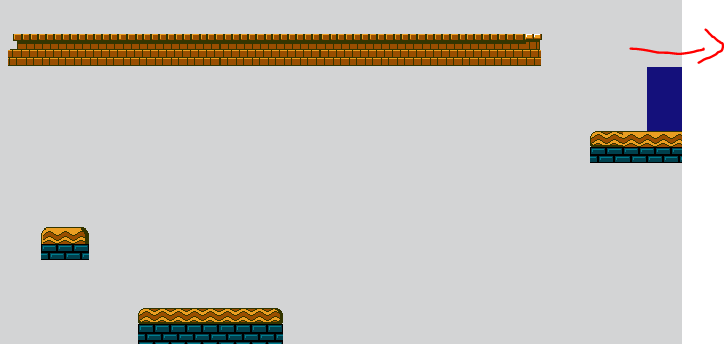
Lance de nouveau le jeu et ton joueur a la capacité de sauté de plateforme en plateforme :
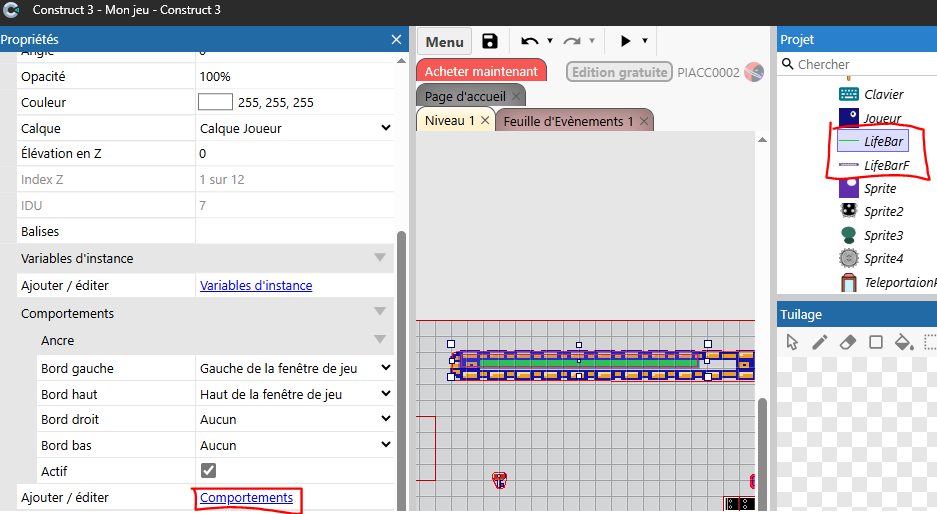
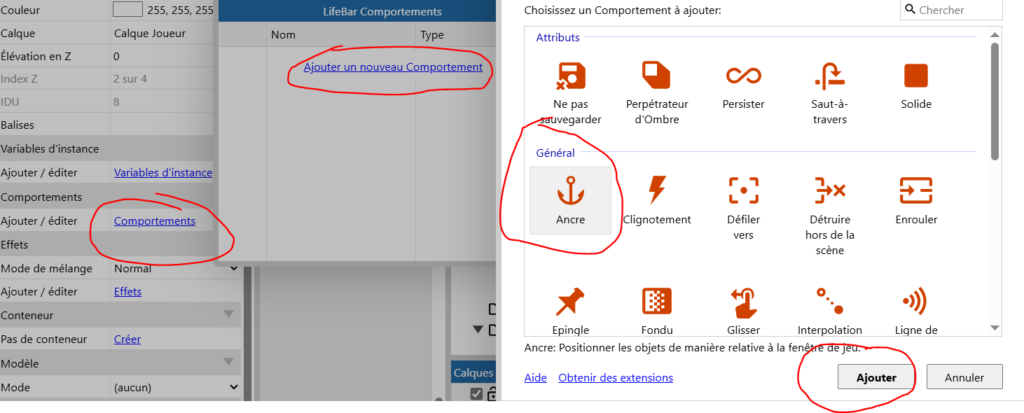
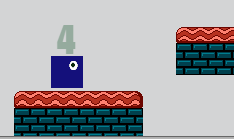
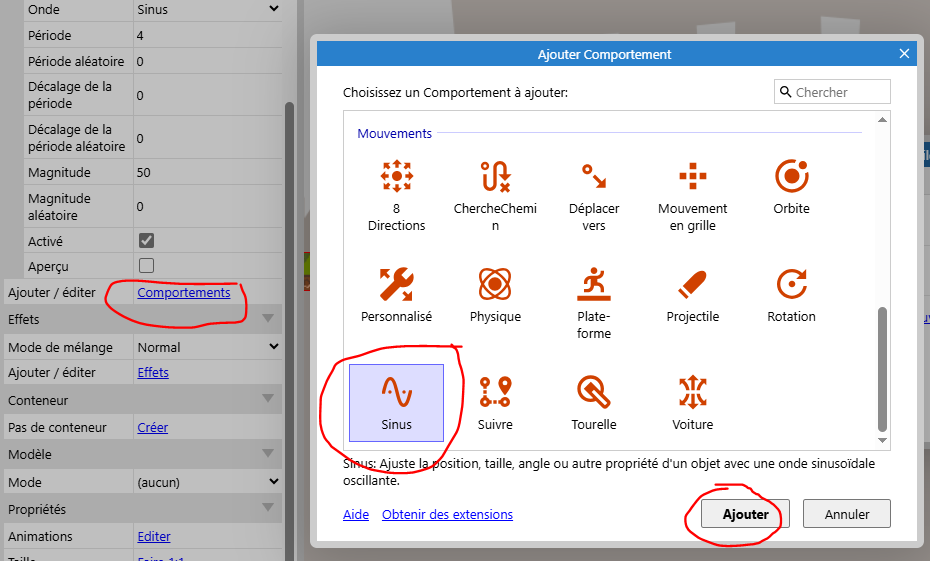
Par contre, tu constates que ton joueur sort de l’écran, tu vas rajouter un nouveau comportement pour que la caméra suive ton joueur :
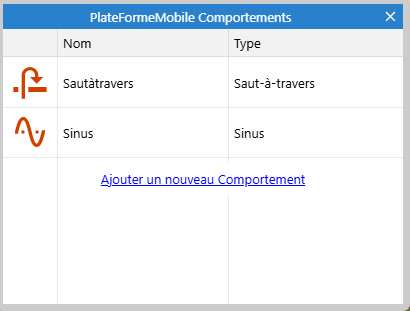
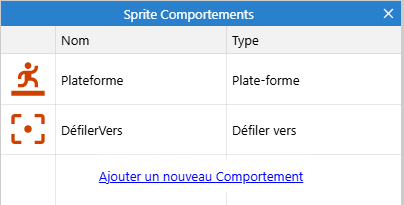
Maintenant tu as ces deux comportements pour ton joueur :
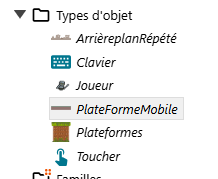
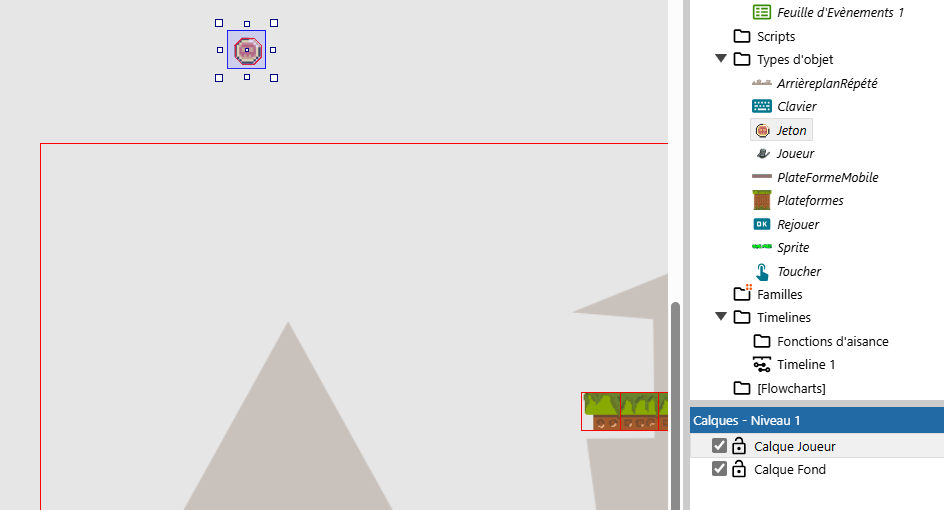
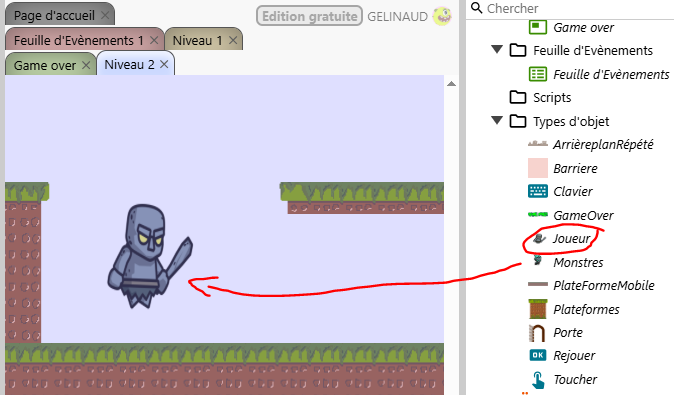
Une dernière action, tu vas renommer ton Sprite en Joueur :
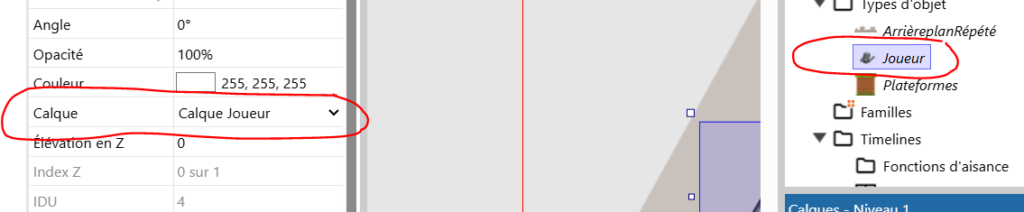
Puis vérifie que Joueur est bien sure le Calque Joueur :
N’oublie pas de sauvegarder ton jeu par Menu Projet Sauver ou par :