Configure MBLOCK pour le suivi de ligne
Utilise le bouton extension

Rajoute ces deux éléments :


Premier essai de fonctionnement du MBOT
Premier téléchargement
Teste ton programme
Teste une programmation des moteurs
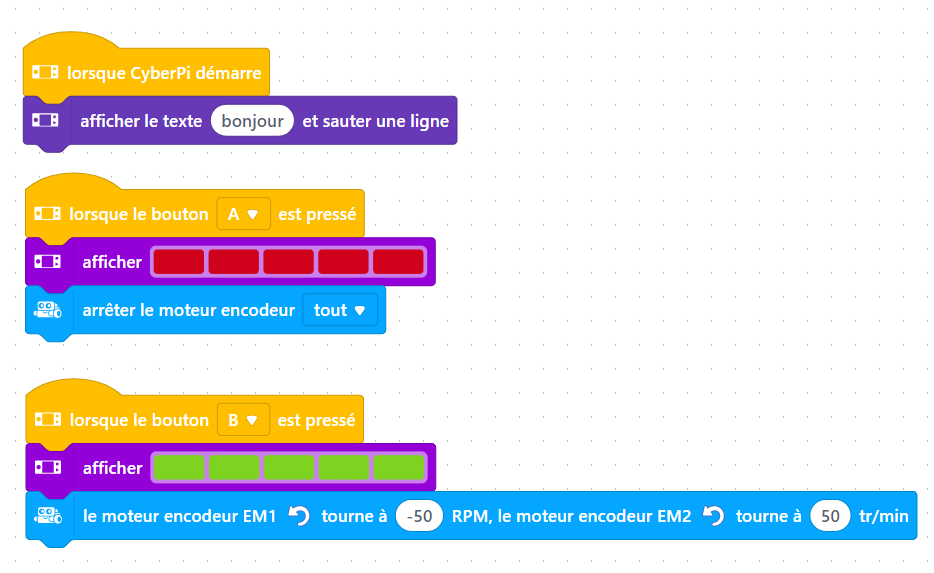
Teste ton programme
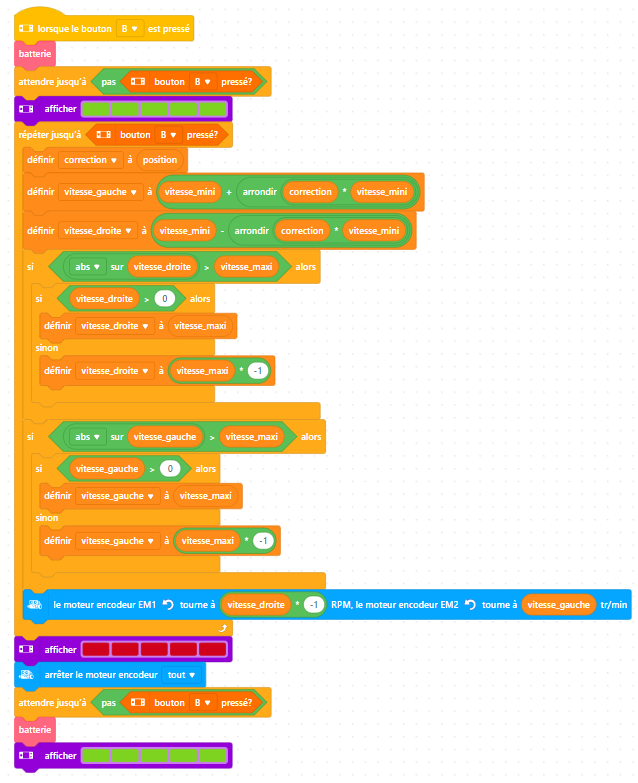
Essayons de programmer par étape le suivi de ligne
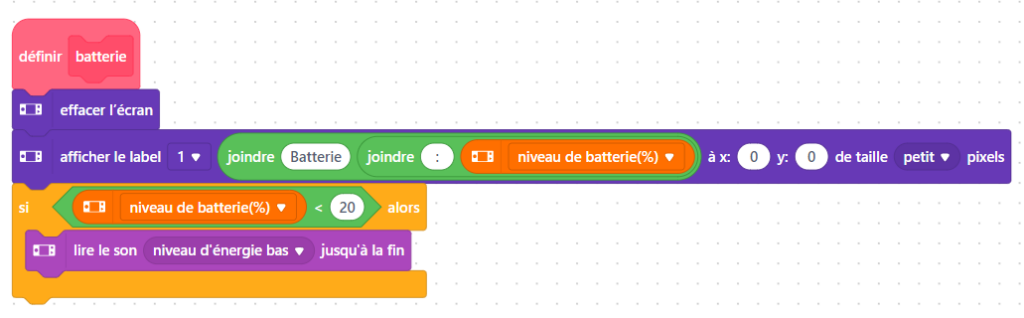
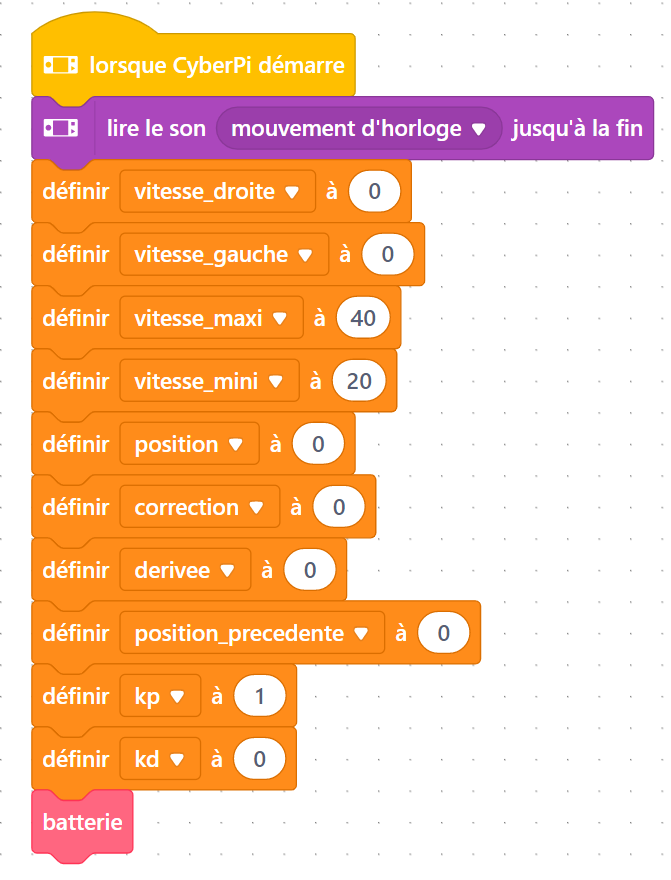
Affichons le niveau de batterie car si celle-ci est inférieure à un certain niveau, le comportement du robot devient incohérent :
Sous le lancement du MBOT CyberPi crée les variables suivantes :
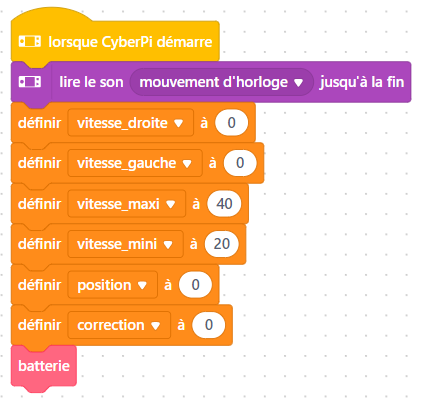
- vitesse_droite : pour gérer la vitesse du moteur EM1
- vitesse_gauche : pour gérer la vitesse du moteur EM2
- vitesse_maxi : vitesse maximum du robot
- vitesse_mini : vitesse moyenne du robot
- position : poids de la position du robot par rapport à la ligne noire
- correction : correction à appliquer aux moteurs pour suivre la ligne noire
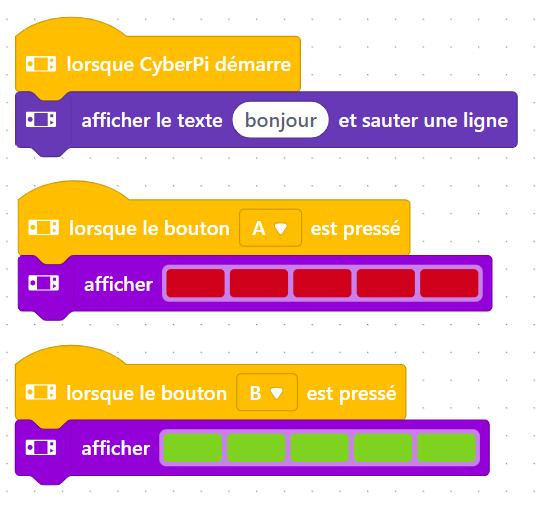
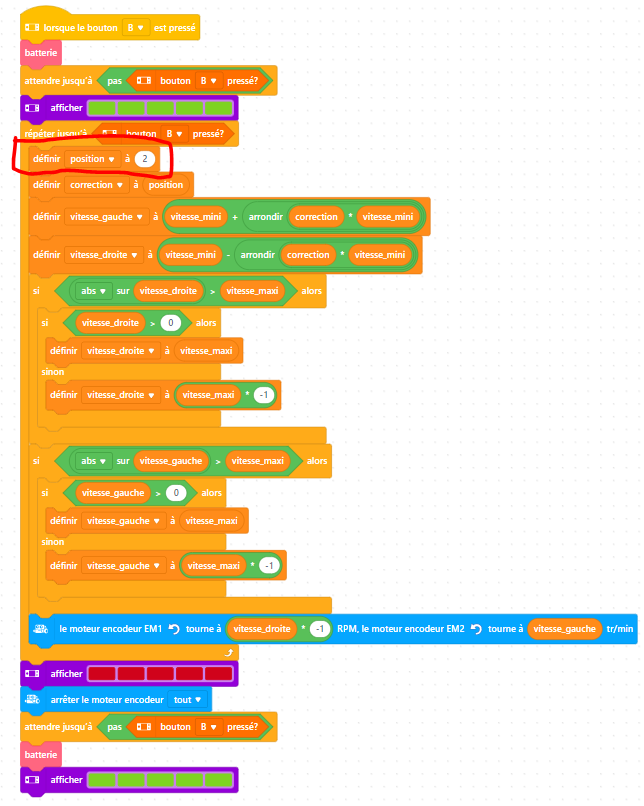
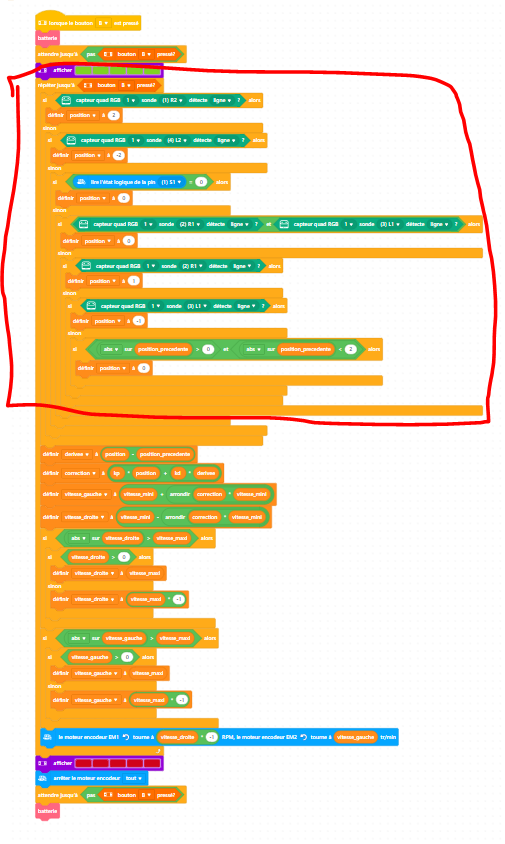
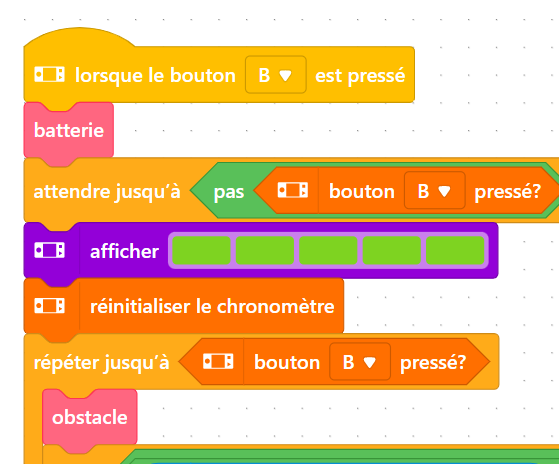
Gestion du bouton B pour lancer le suivi de ligne puis l’arrêter
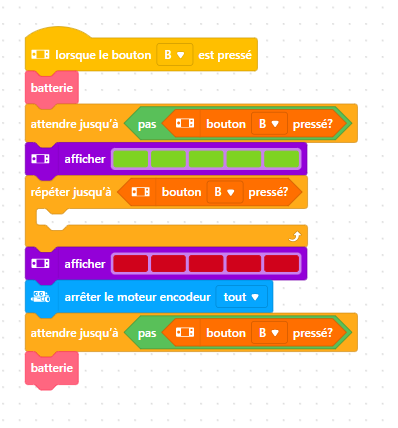
Tester le bouton B , les leds s’allument en vert puis en rouge
Calcul la vitesse des moteurs en fonction de la position du robot par rapport à la ligne noire
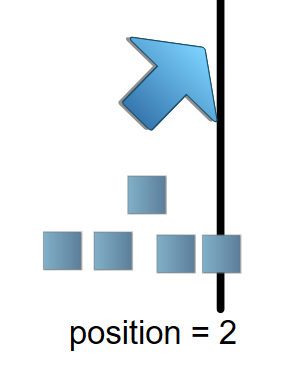
Si le robot est à gauche de la ligne noire, il tourne à droite pour se recentrer sur la ligne :
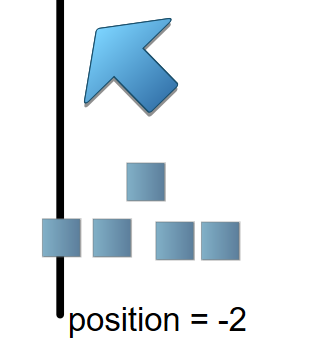
Si le robot est à droite de la ligne noire, il tourne à gauche pour se recentrer sur la ligne :
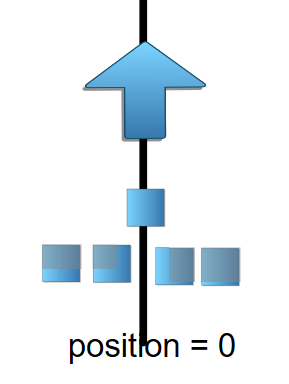
Si le robot est centrer sur la ligne noire, il va tout droit :
Détail du calcul :
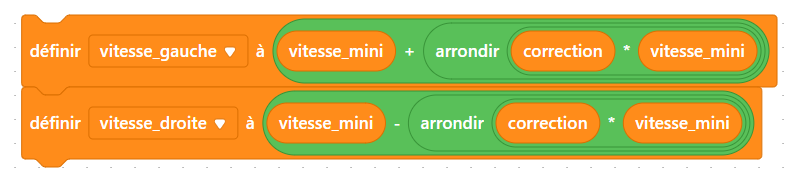


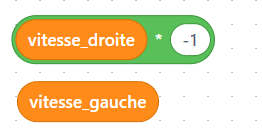
Ne pas oublier que les moteurs du MBOT sont inversés :

Teste pour vérifier que ton calcul est correct avec position = 0 pour aller tout droit :

Teste, le robot roule tout droit
Faire tourner le robot
Teste des valeurs de position de -2 à 2 :
Teste le robot pour qu’il tourne plus ou moins à gauche ou à droite avec des valeurs dans position entre -2 et 2
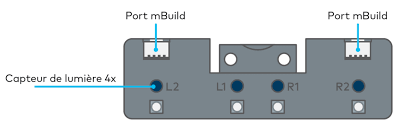
Une première version pour un Suivi de ligne
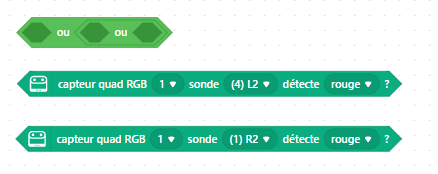
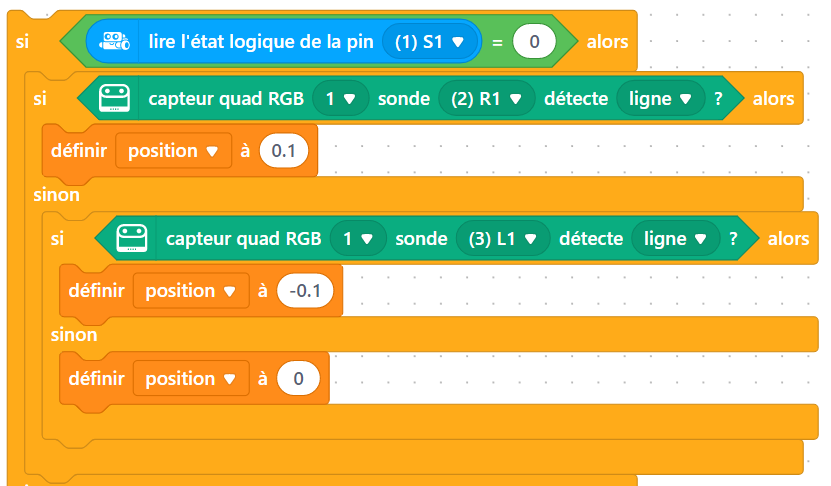
Utilise cette instruction pour la détection de la ligne noire :
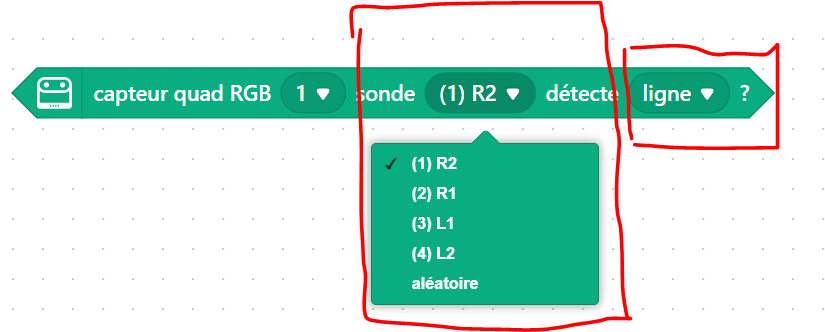
Elle permet une détection par capteur L2, L1, R1, R2 :
Plus de détail de la gestion des capteurs :
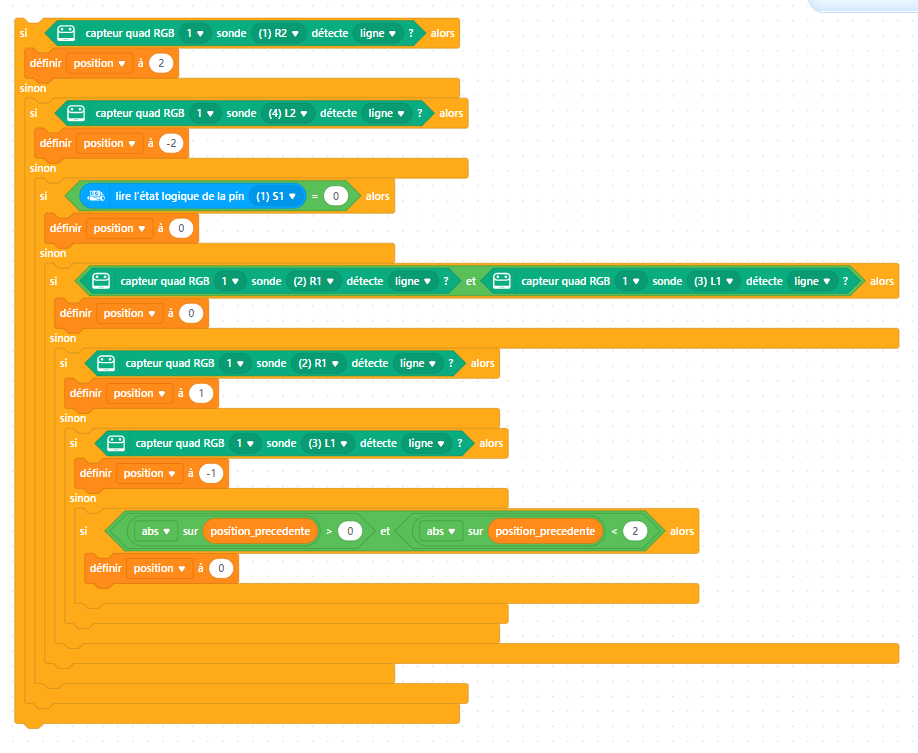
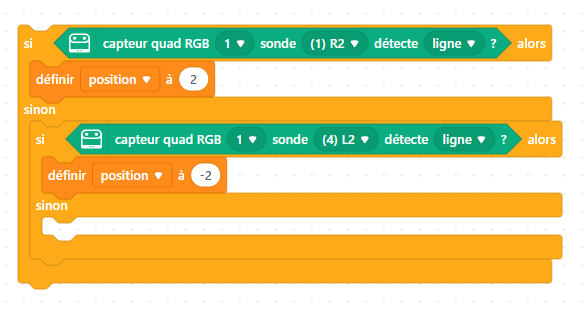
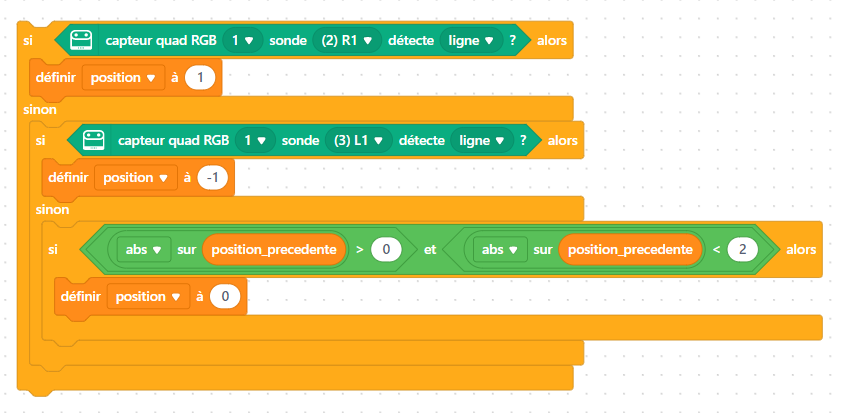
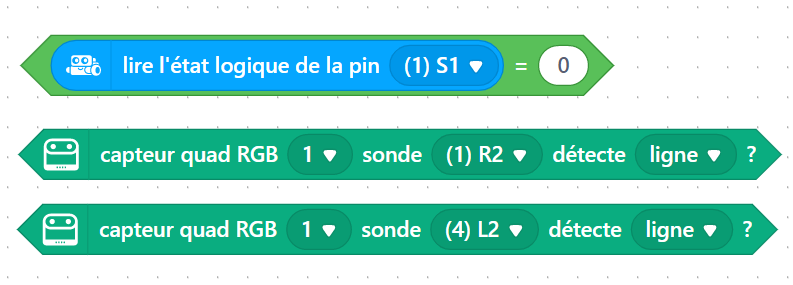
Détection d’un virage par les capteurs extrêmes L2, D2 du Quad RGB du MBOT :

Capteur central ou L1 et R1 sur la ligne pour aller tout droit :
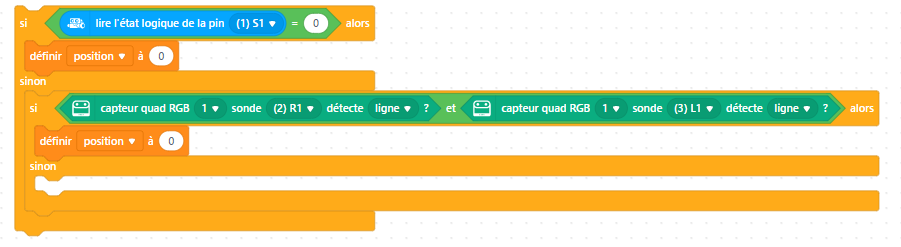
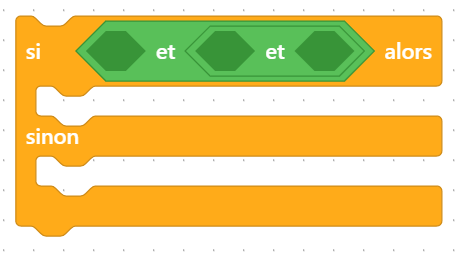
Détail du si :
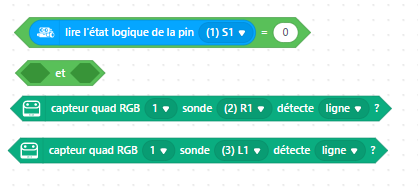
Et les 2 capteurs L1 et R1 du Quad RGB du MBOT :
Teste le suivi de ligne
Tu peux rajouter plus de précision :
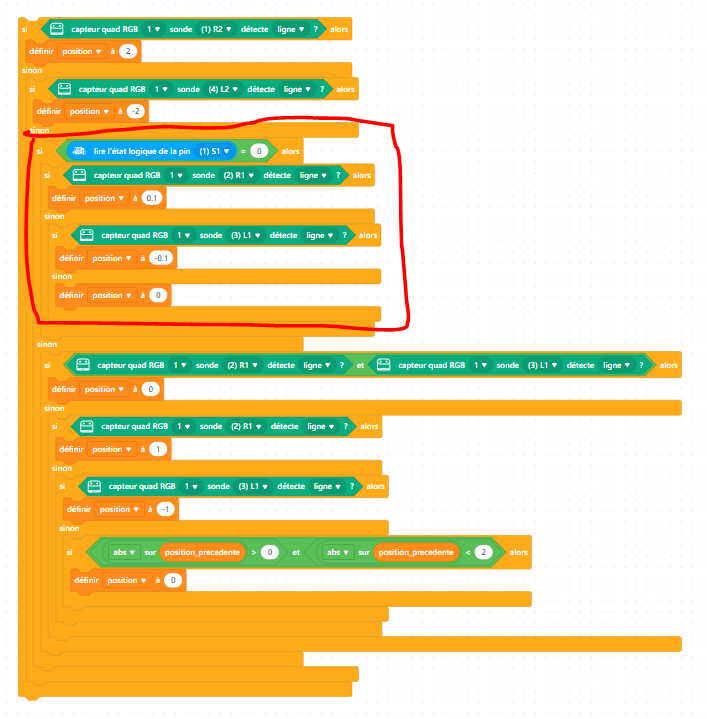
Plus de détail sur le rajout :
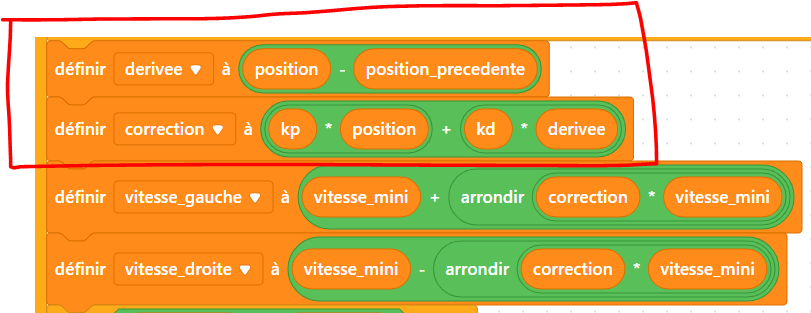
Modifie le suivi de ligne avec le calcul du PID
- derivee : afin de suivre quand le robot passe de gauche à droite de la ligne noire
- Kp : pour accentuer ou diminuer pour prendre le angles droits,
- 1 ne fait rien
- < 1 diminue l’angle des virages
- > 1 augmente l’angle des virages
- Kd : pour empêcher le robot de faire des zigzags
- 0 ne fait rien
- 0 à 3 diminuer les zigzags en ligne droite

Tu peux jouer sur ces deux valeurs pour ajuster ton suivi de ligne :
à
puis teste :

à
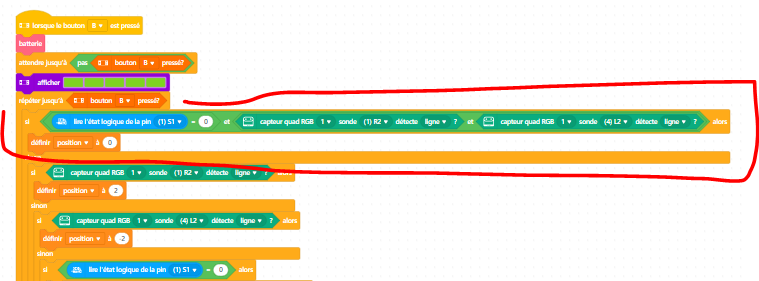
Cas du croisement, le robot doit aller tout droit
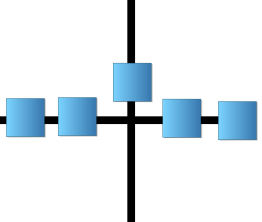
Si le capteur au central détecte une ligne noire en même temps que les capteurs L2 et R2, on peut déduire que le robot est sur un croisement. Le robot doit aller tout droit.

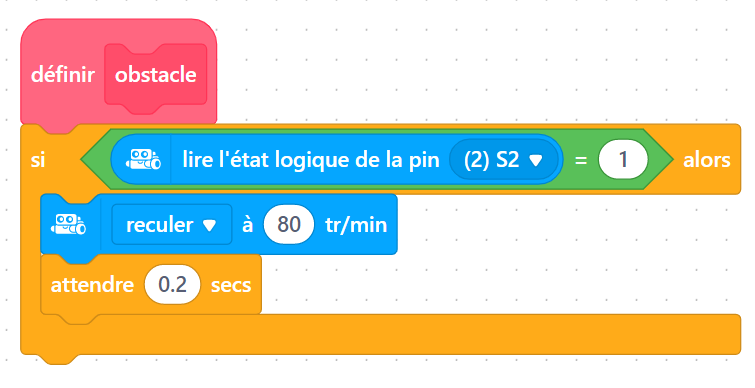
Passage d’un obstacle
Si le robot détecte un obstacle avec un dispositif placé à l’avant du robot, une stratégie de forçage est déclenchée : le robot effectue une accélération franche vers l’avant afin de franchir l’obstacle.
Puis rajouter l’appel de la fonction dans le code :
Arrêt du robot sur une ligne rouge