Ton maqueen doit disposer de ce dispositif, deux gros yeux :
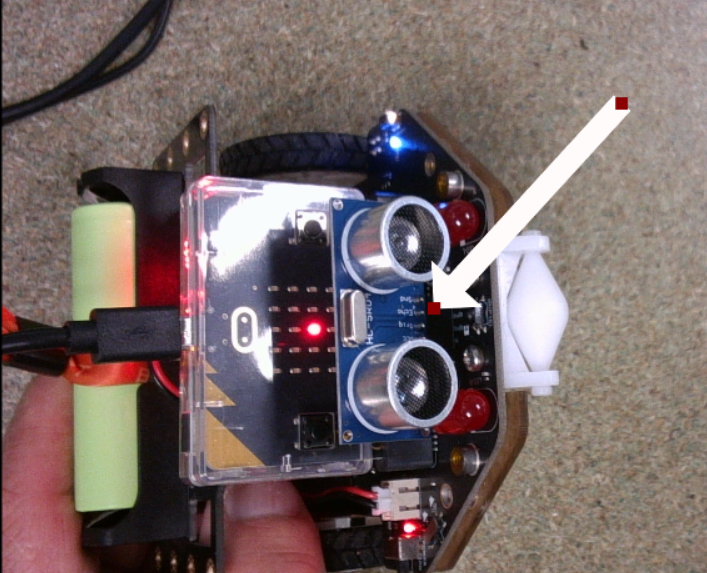
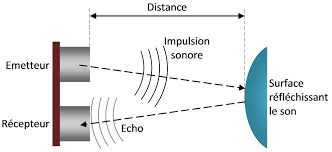
Ce capteur à ultrasons, un sonar, utilise l’écho pour déterminer la distance à laquelle se trouve un objet.
L’émetteur permet d’envoyer une impulsion sonore de l’ordre de 40 kHz. Cette impulsion est réfléchie sur un obstacle puis est détectée lorsqu’elle revient au récepteur sous la forme d’un écho.
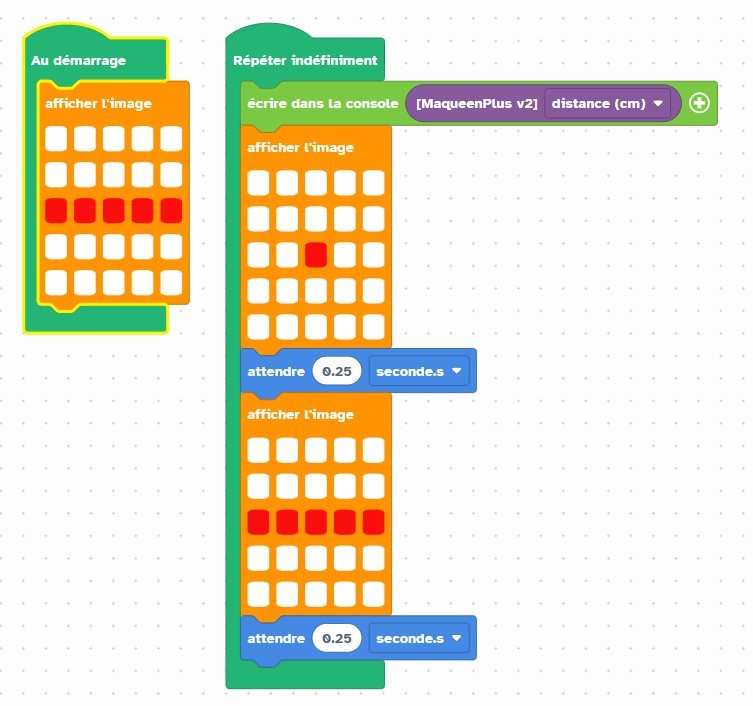
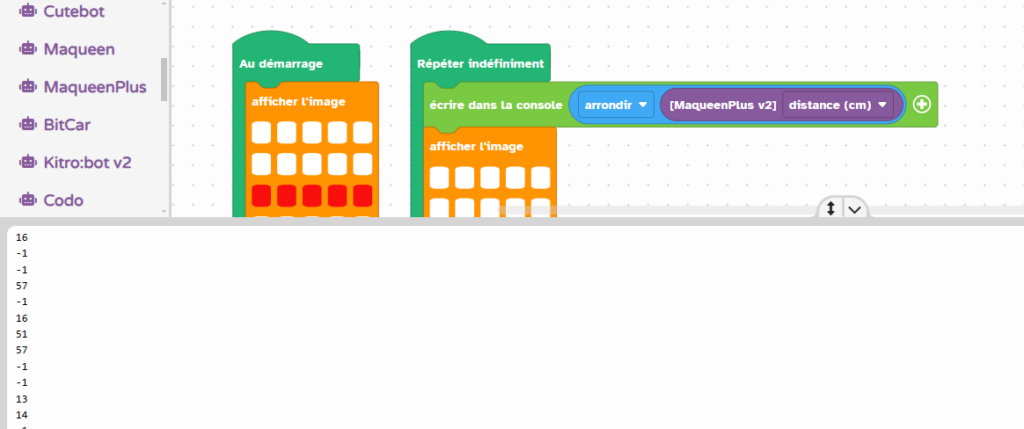
Programme pour visualiser dans la console les valeurs retournées par le dispositif de sonar pour détecter les obstacles :
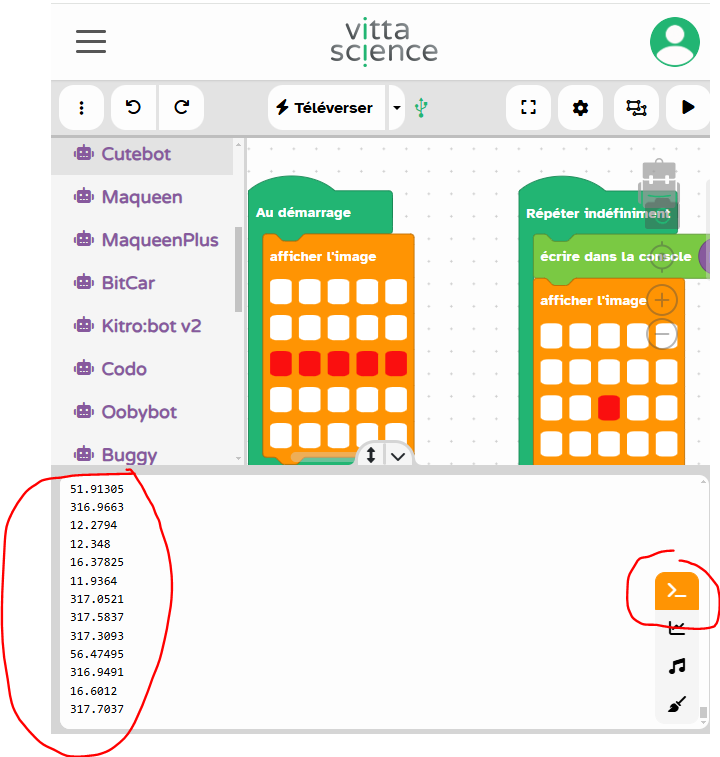
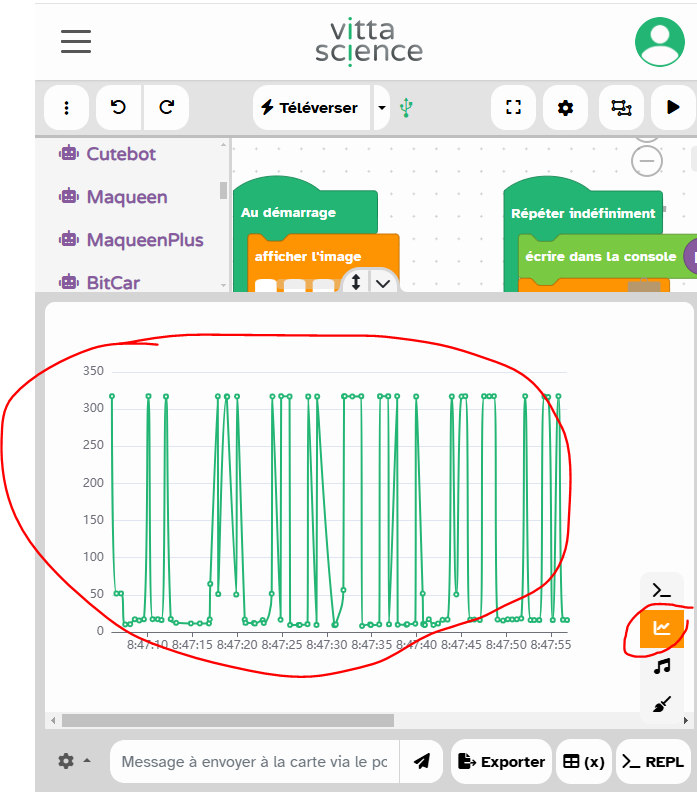
Tu peux visualiser soit les valeurs avec la console ou sous forme graphique :
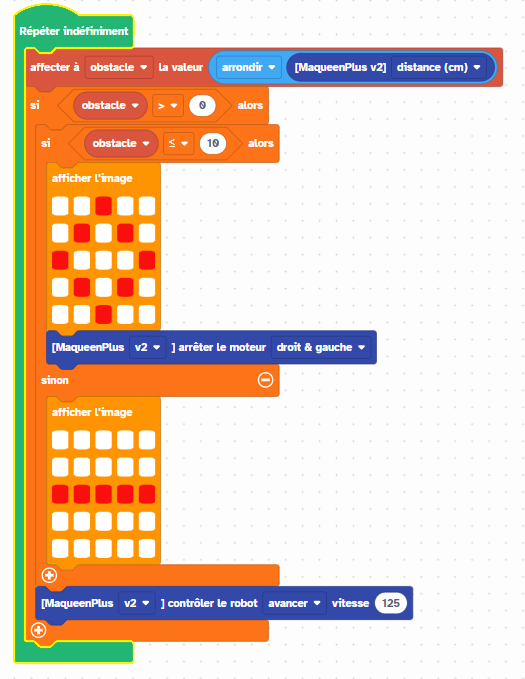
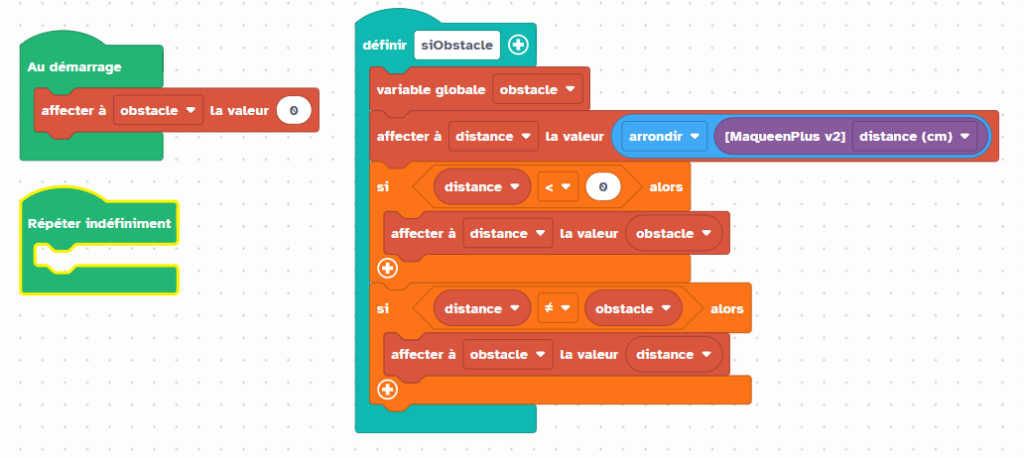
Arrondie la valeur de la distance pour obtenir une valeur entière :
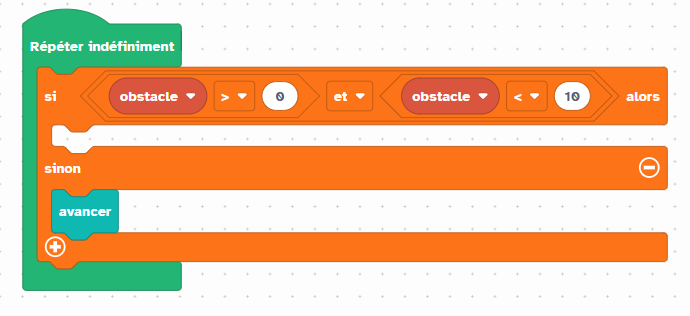
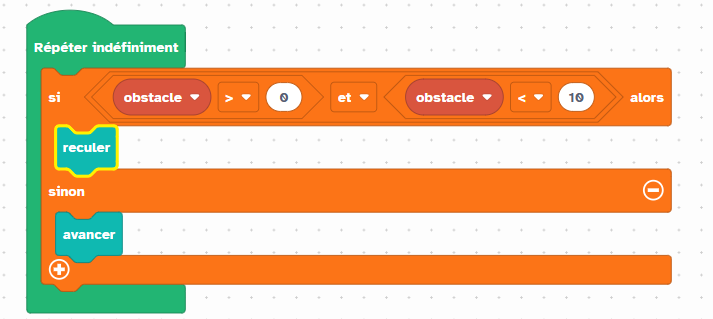
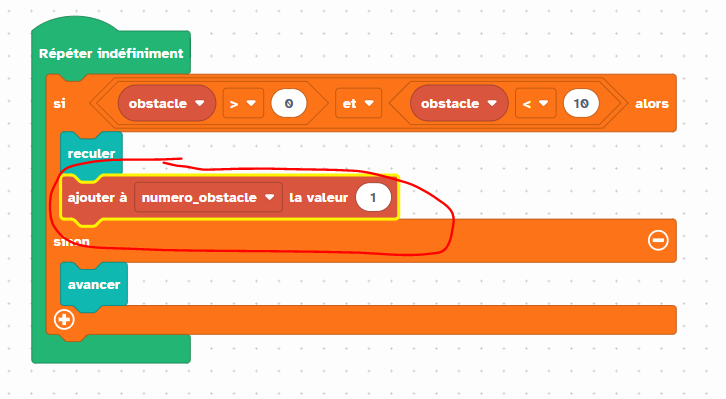
Optimise pour détecter seulement un obstacle entre > à 0 et < 10 centimètres :
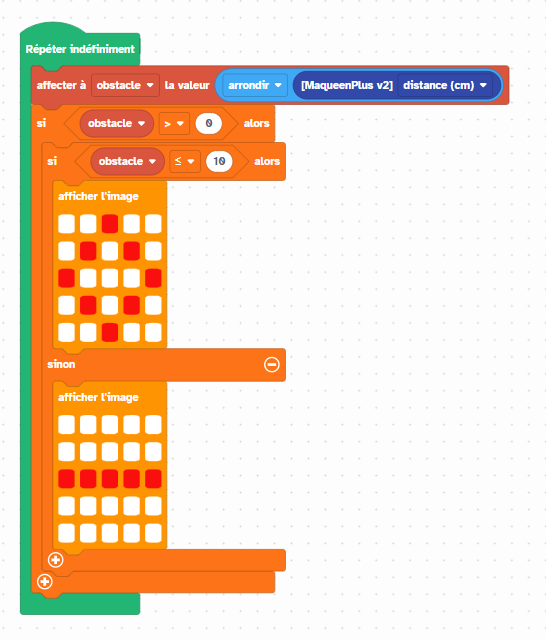
Supprime tous les retours ayant une valeur inférieure à 0. Il est possible que des valeurs de retour soient égales à -1 dans une série de valeurs indiquant la distance à un obstacle.
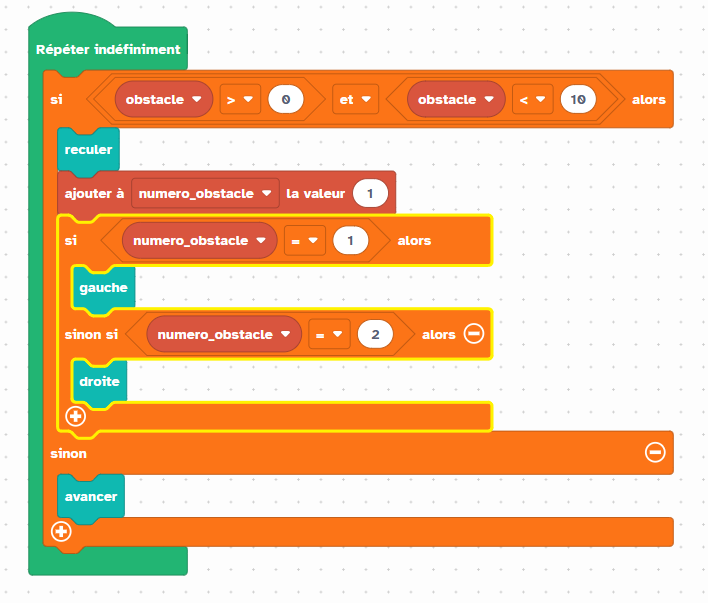
Rajoute les instructions sur les moteurs pour avancer si aucun obstacle et arrêter le robot sur l’obstacle.