PARTIE 01 : Introduction au Maqueen Plus V2
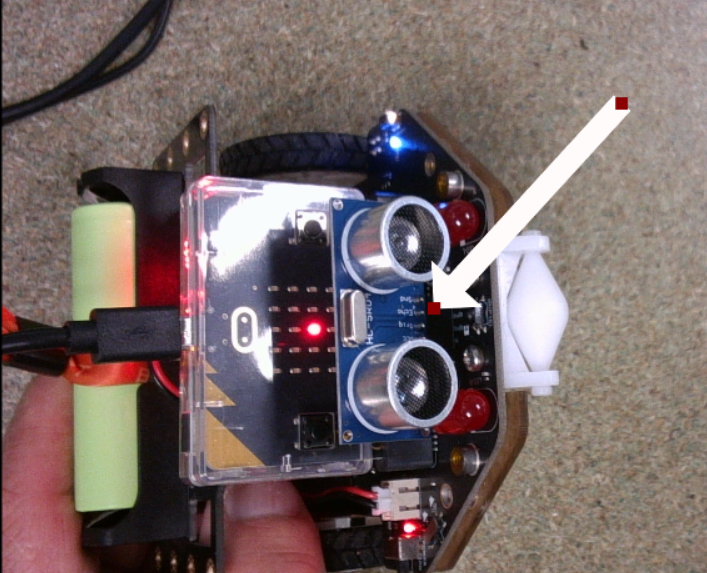
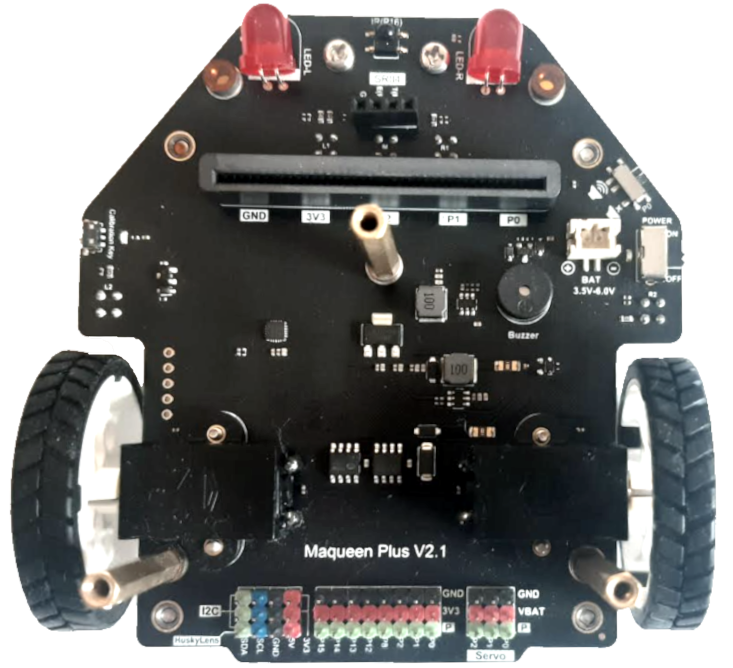
| Caractéristiques : 5 capteurs de suivi de ligne (sorties analogiques et digitales), calibration automatique via bouton-poussoir 2 LEDs frontales rouges 4 LEDS RGB Néopixels Capteur de distance ultrason HC-SR0 4Buzzer pour effets sonores 2 motoréducteurs N20 :vitesse de rotation nominale : 266 tr/minmodulation PWM rapport de réduction: 1:75 Capteur infrarouge permettant au robot d’être télécommandé Port d’extension GPIO : 8 ports : P0 P1 P2 P8 P12 P13 P14 P15 avec 3,3V 3 ports pour servomoteur : P0 P1 P2 avec Vbat 2 Ports I2C 3.3V1 Port I2C 5V Alimentation par batterie Li-Ion 18650 3.7V 3500 mAh avec circuit de chargement Tension de charge : 5 V, temps de charge : 4 heures, indicateur du niveau de charge : 4 LED Dimensions du produit : 14 x 101 x 70 mm | 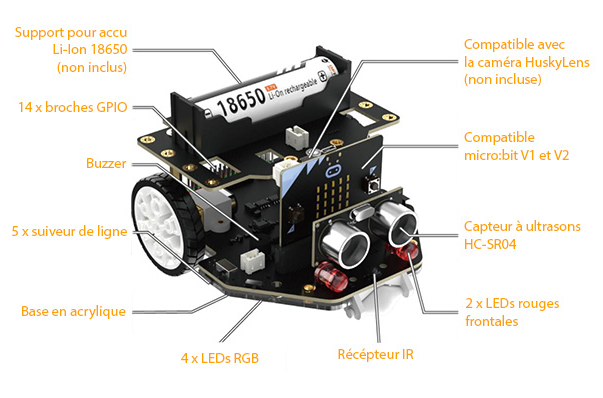 |
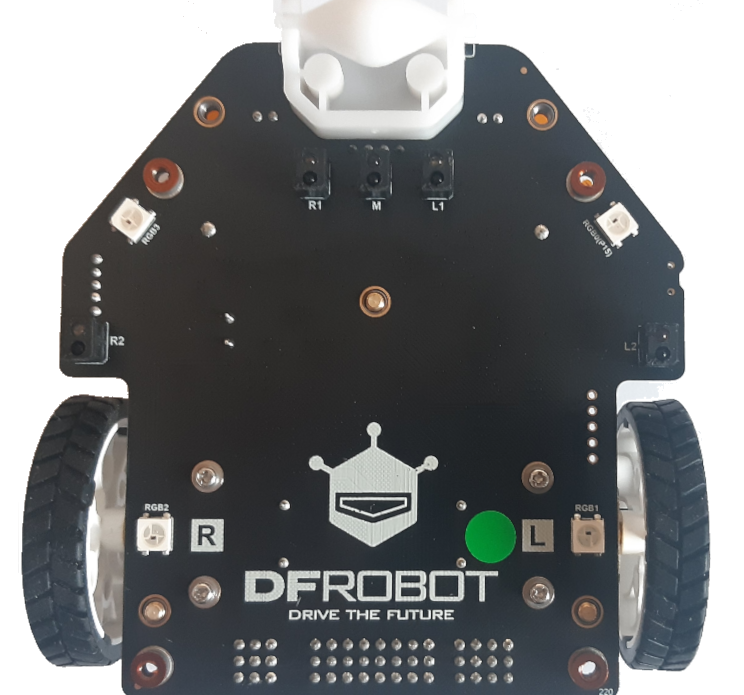
| Le robot dispose à l’avant de 5 capteurs optiques infrarouge. | 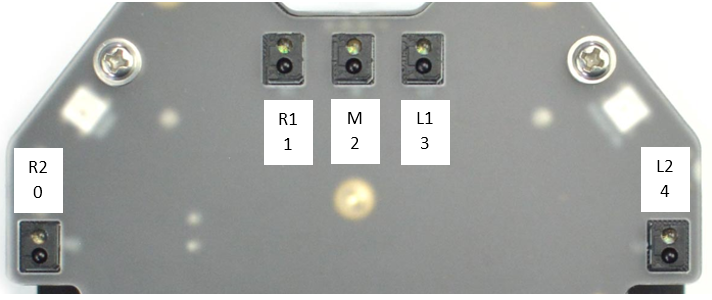 |
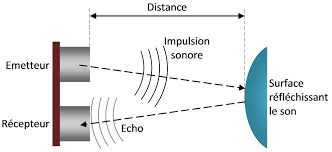
| Fonctionnement d’un capteur optique infrarouge | |
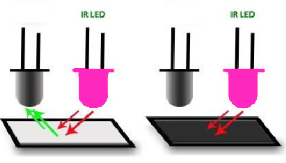 | Le capteur optique infrarouge est constitué : d’une LED infrarouge d’un photo-transistor Le capteur envoie un signal haut lorsqu’il détecte le noir et un signal bas quand il détecte le blanc. |
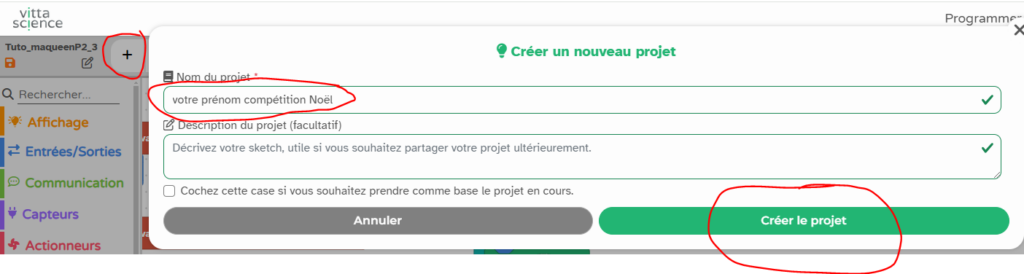
Pour le programmer
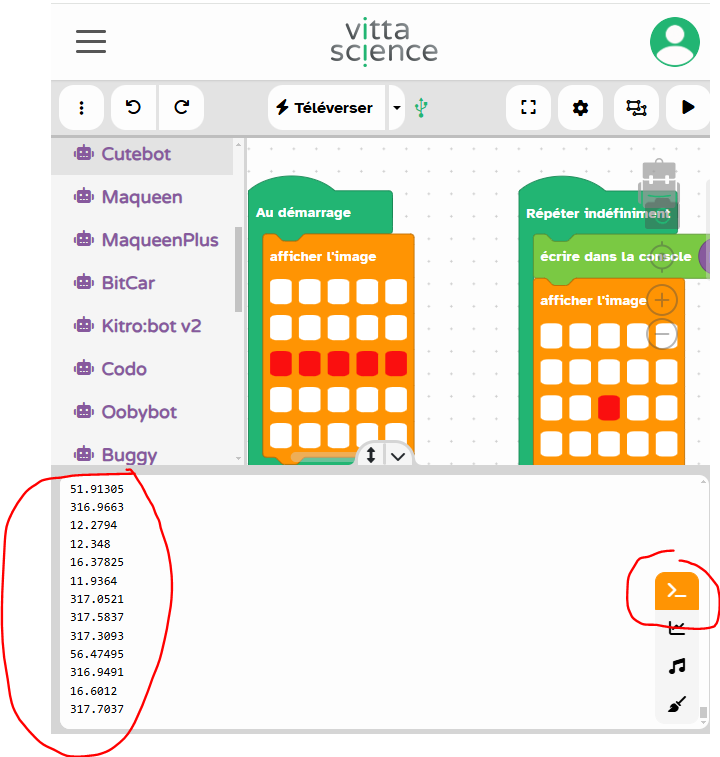
Va sur le site vittascience : fr.vittascience.com

Choisis « Programmer »

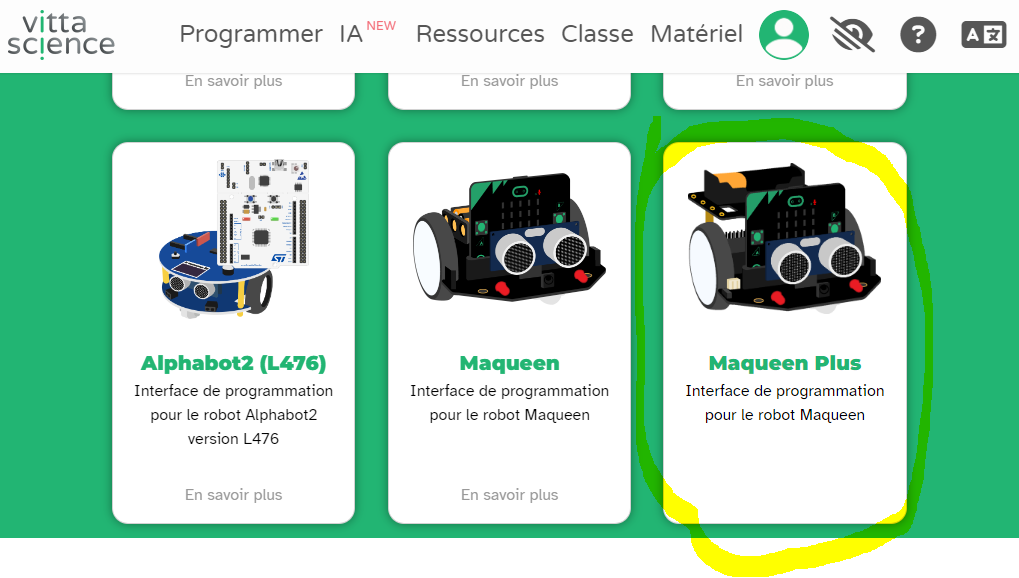
Puis fais défiler ton écran pour choisir le robot Maqueen Plus
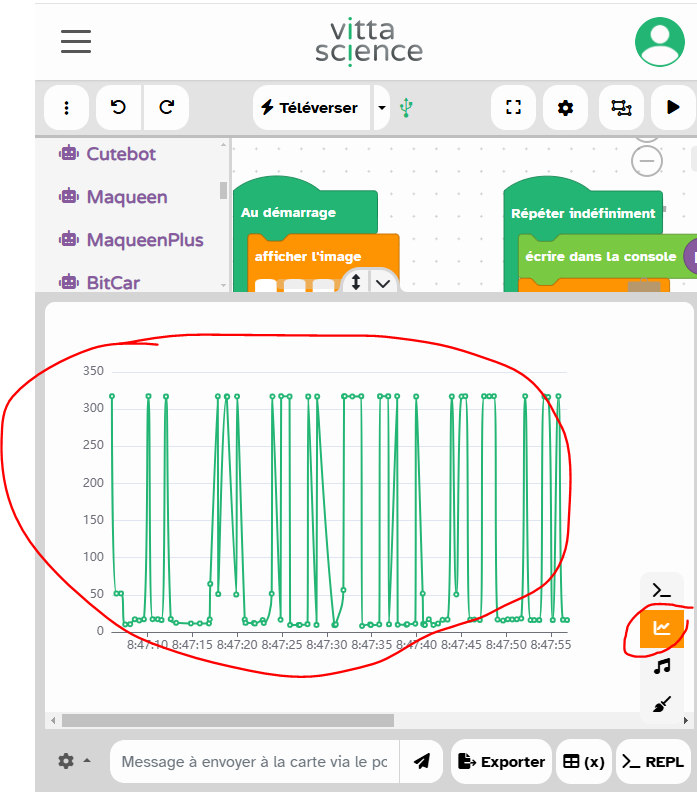
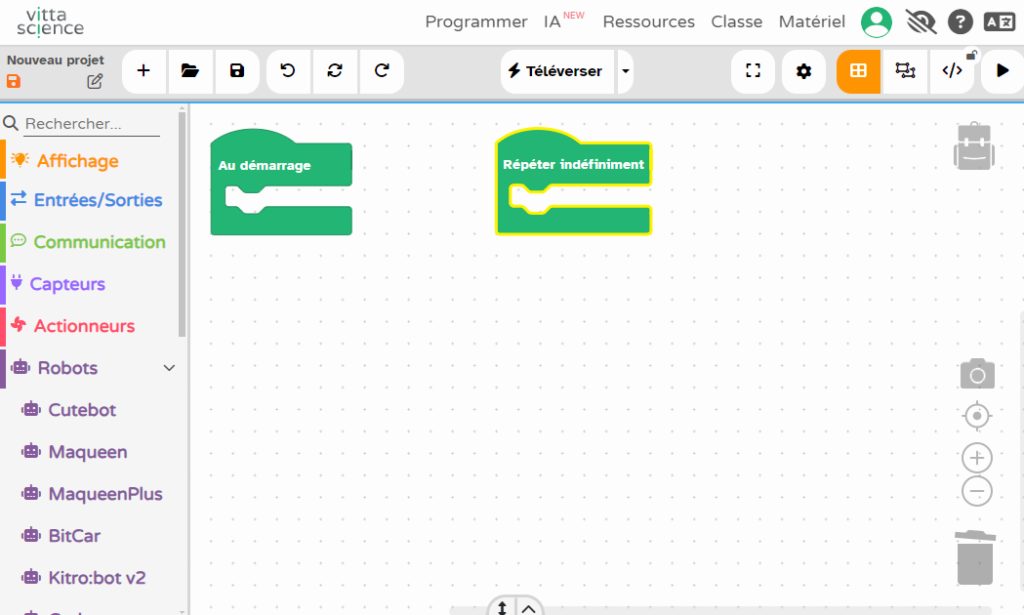
Choisis le mode Bloc et agrandis ton écran en baissant la console du bas :

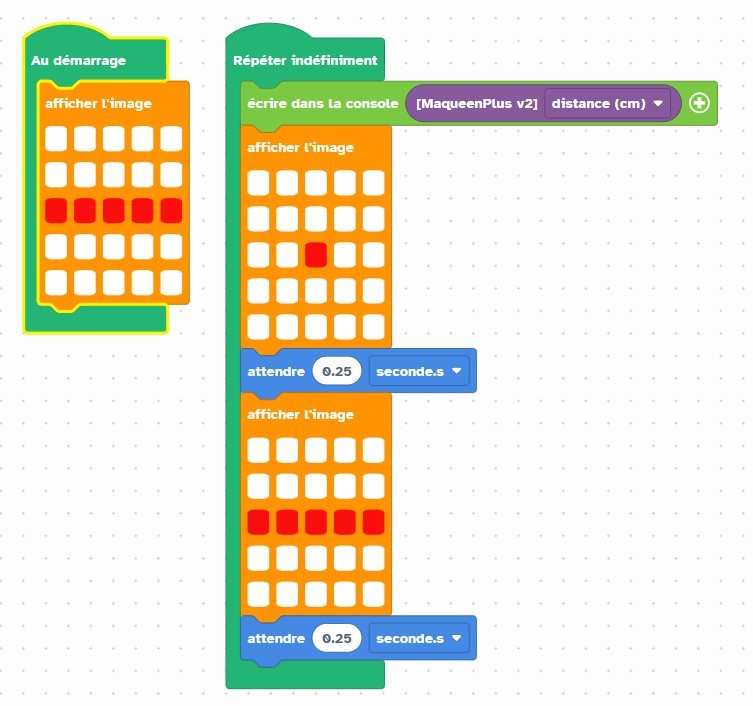
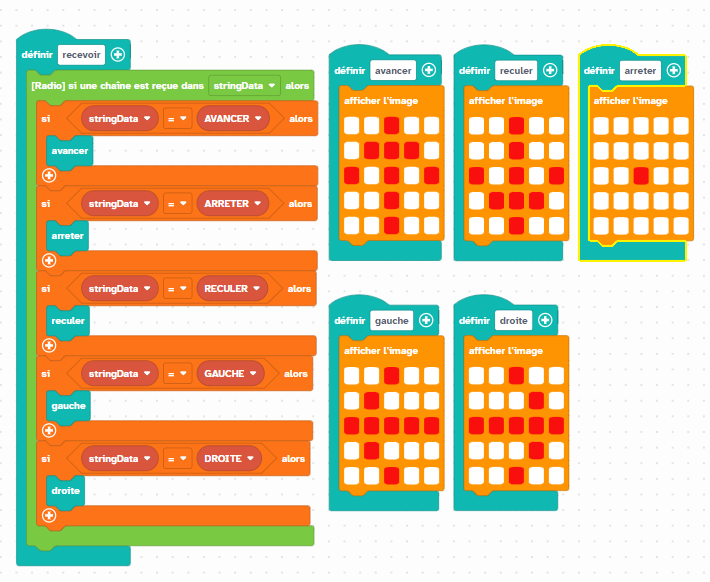
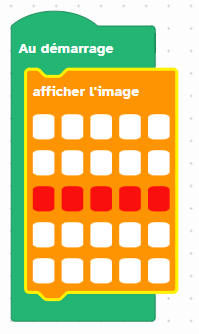
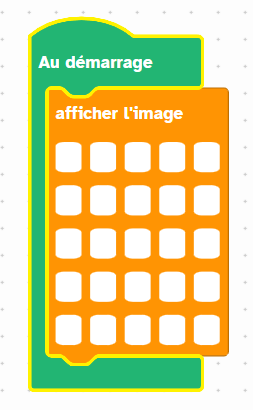
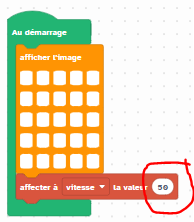
Pour gérer le tableau de LED de la carte microbit utilise l’instruction « afficher l’image » sous Affichage :
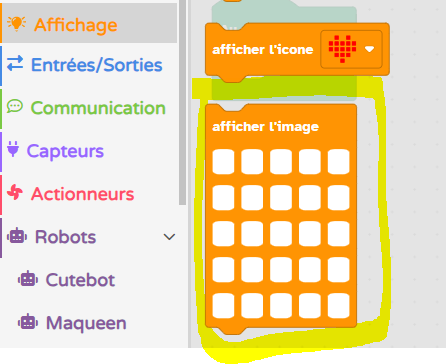
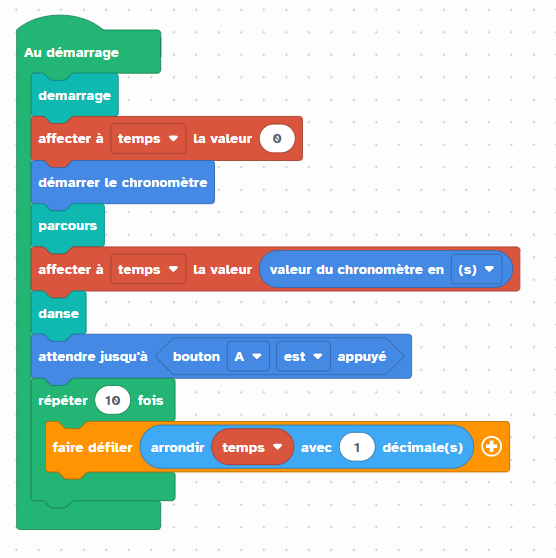
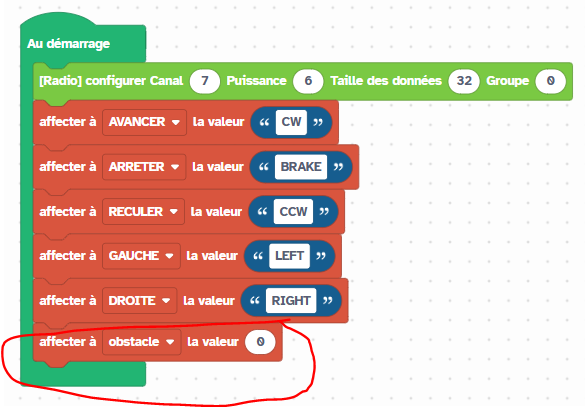
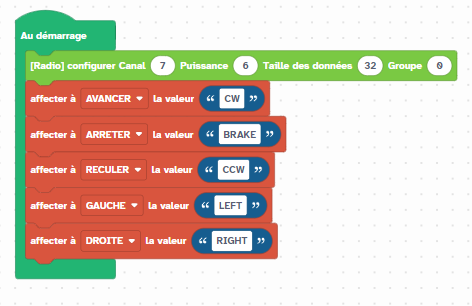
Par exemple allume les LEDs de la manière suivante dans « Au démarrage » :
Tu peux tester en demandant à Téléverser sur la carte :

Demande la connexion avec la carte puis valide le transfert.
Tu utilises les instructions suivantes pour le suivi de la ligne noire.
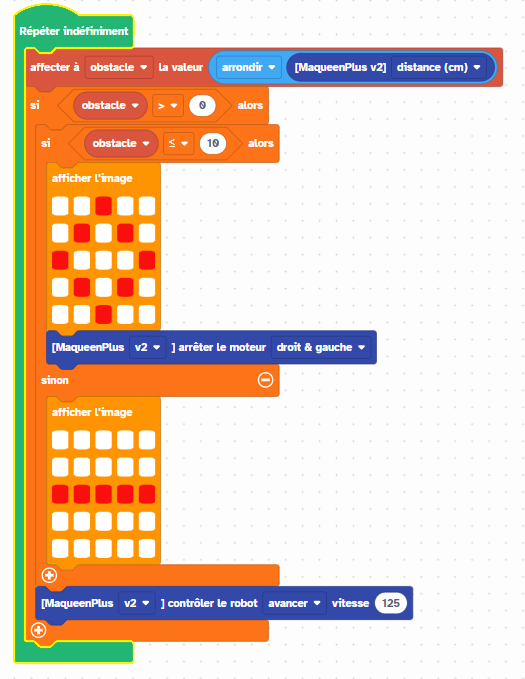
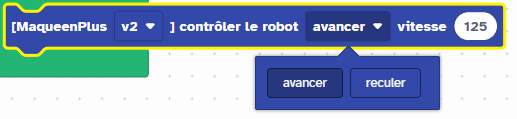
Pour faire avancer ton robot :

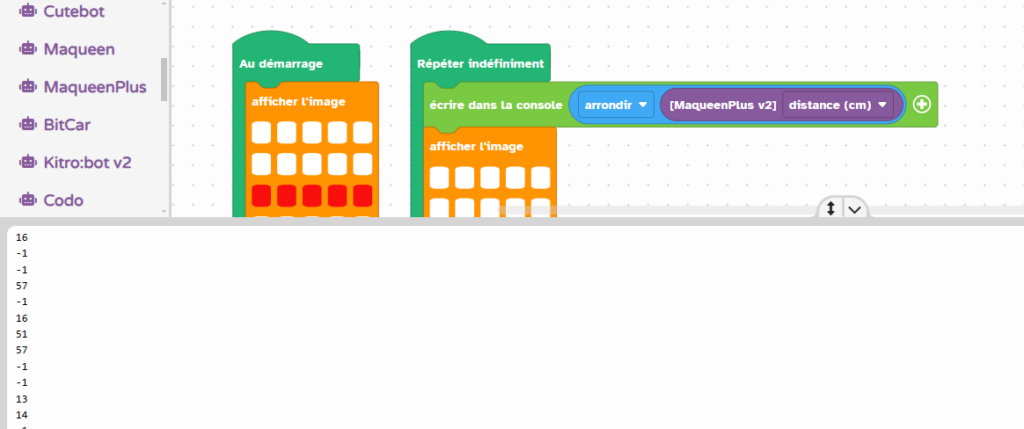
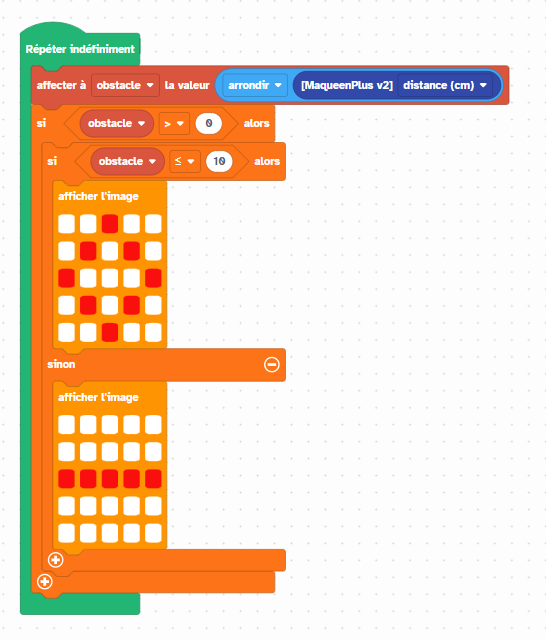
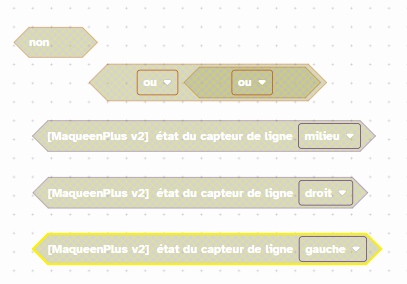
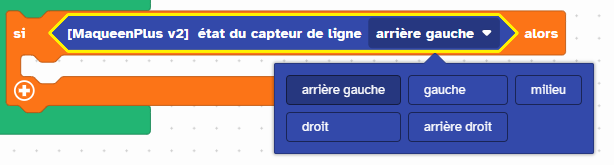
Pour détecter la ligne noire :
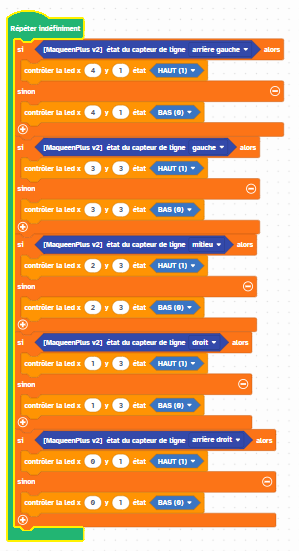
Programme pour vérifier que ton robot détecte bien la ligne noire :
Téléverse ton programme :

Puis teste si la LED correspondante s’allume lorsque le phot réflecteur passe sur la ligne noire ? :

Comment calibrer le Maqueen Plus ?
5 capteurs de suivi de ligne sur Maqueen Plus ont chacun une LED bleue qui indique l’état.
Si vous constatez qu’un capteur de suivi de ligne n’est pas sensible à une ligne noire, calibrez-le comme suit :
1. Mettez Maqueen Plus dans la zone d’étalonnage, une feuille noire par exemple. Le mettre sous tension
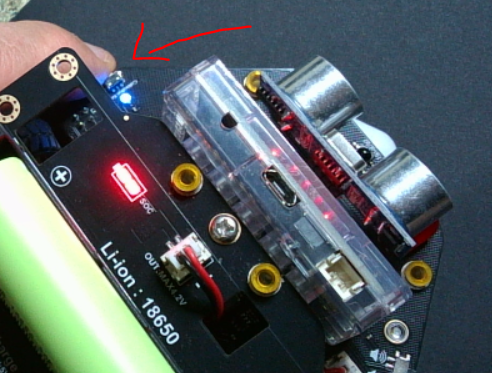
2. Appuyez sur « Calibration-key » pendant environ 1 seconde, les 2 grandes LED avant clignoteront en vert. Relâchez la touche, puis l’étalonnage est terminé.
PARTIE 02 : SUIVI LIGNE
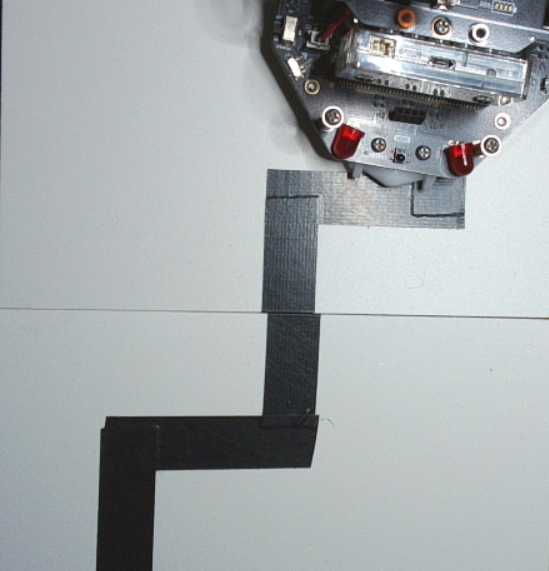
Comment suivre la ligne noire
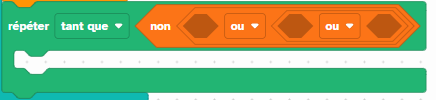
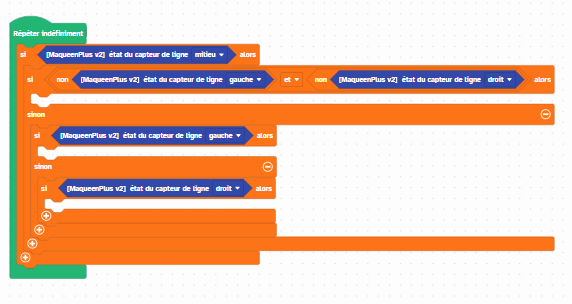
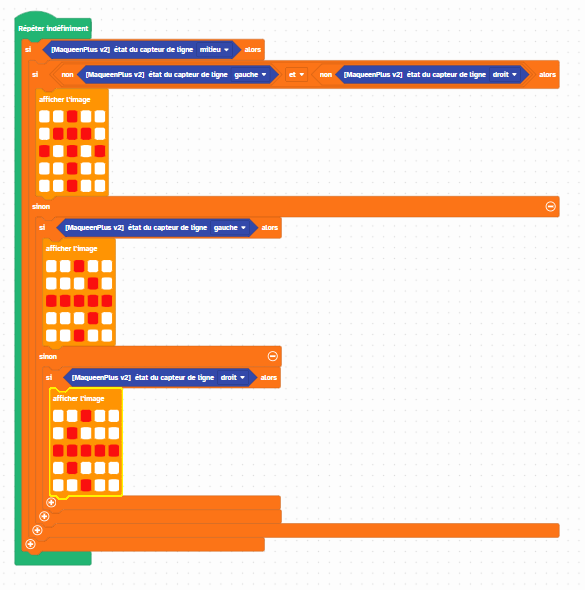
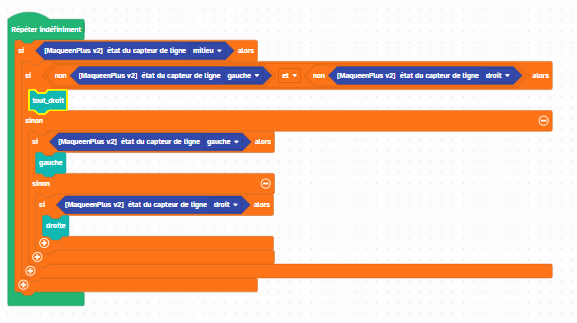
Programme ton robot pour qu’il tente de rester sur la ligne noire :
Le capteur de gauche et celui de droite ne captent pas la ligne noire, alors les deux capteurs sont de chaque coté de la ligne noire, le robot peut avancer tout droit.
Le capteur de gauche est sur la ligne noire, ramène ton robot vers la gauche.
Le capteur de droite est sur la ligne noire, alors ramène ton robot vers la droite.



Premier essai pour suivre la ligne noire
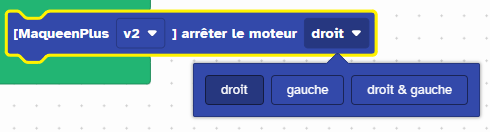
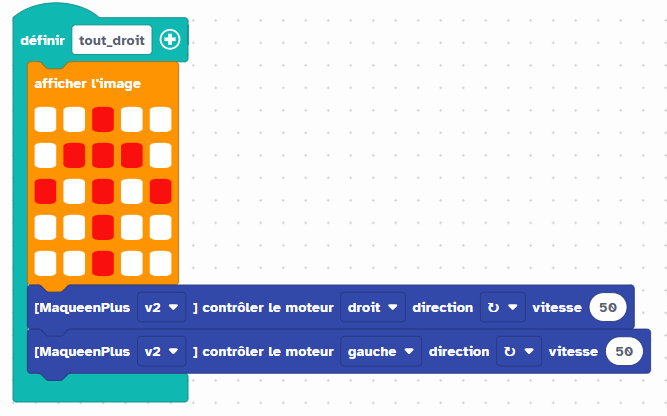
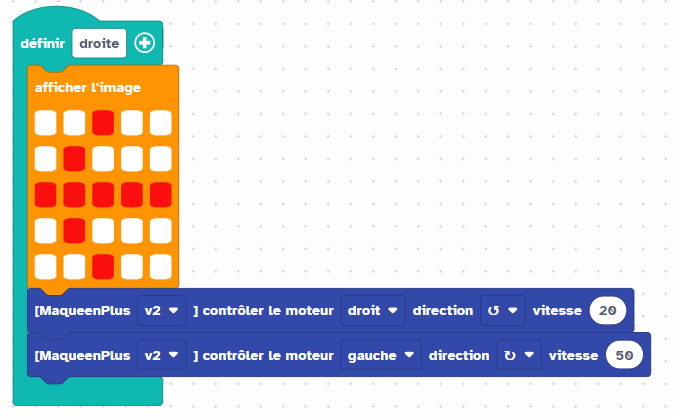
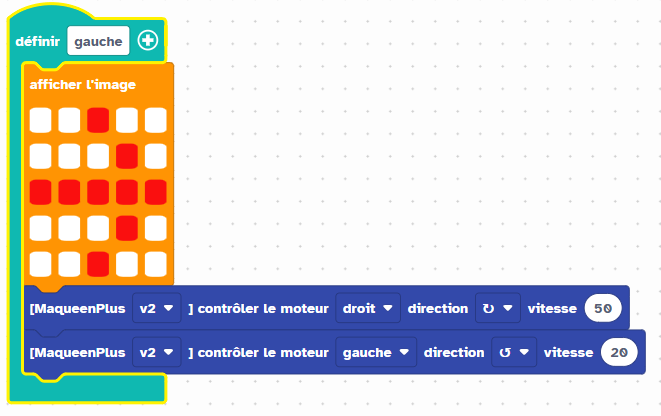
Programme les deux moteurs pour aller tout droit, à gauche et à droite.
Pour ton premier essai réduit la vitesse à 50, le Maqueen est très véloce :
Plus vite
Augmente la vitesse en utilisant une variable :



Utilise un pourcentage de la vitesse pour le moteur qui tourne en sens inverse :
par exemple si on souhaite une vitesse réduite de 35% de la vitesse initiale de 50 : (50 * 35) /100 soit :


Puis arrondir pour obtenir la partie entière de la division :



Augmente petit à petit la vitesse pour voir jusqu’à quand ton robot peut suivre la ligne noire :

Ou diminue ou augmente le pourcentage pour prendre des virages plus larges ou plus serrés :

PARTIE 03 : SUIVI LIGNE AMELIORE
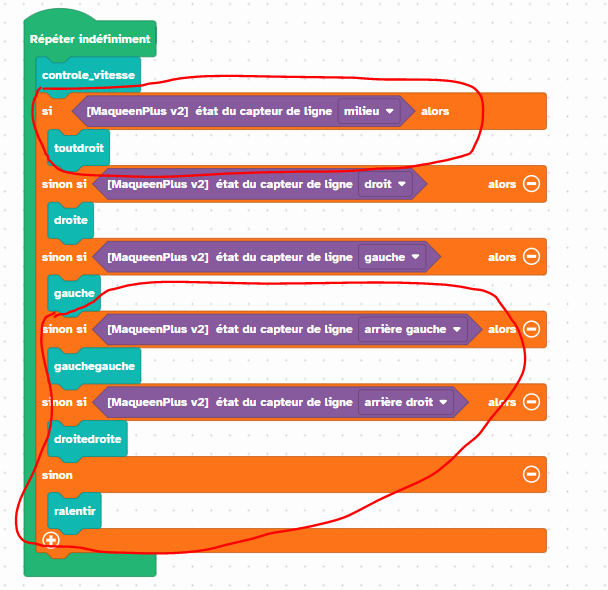
Améliore ta programmation pour des passages très difficile en utilisant les capteurs arrière gauche et droit :

Quand le capteur arrière droit ou gauche détecte la ligne noire, on peut supposer que le robot est sur une courbe prononcée ou un angle droit de la ligne noire. Afin que le robot puisse suivre la ligne noire, donne la possibilité au robot de tourner plus rapidement sur la détection des capteurs arrière droit ou gauche.
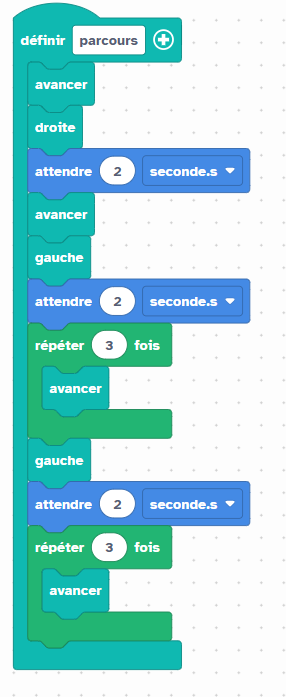
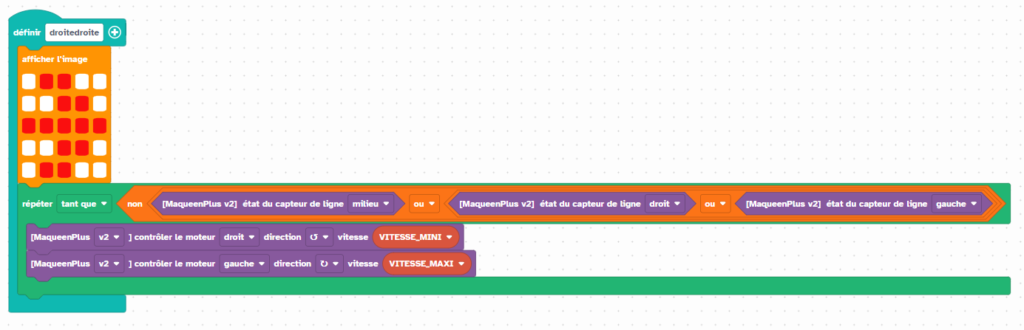
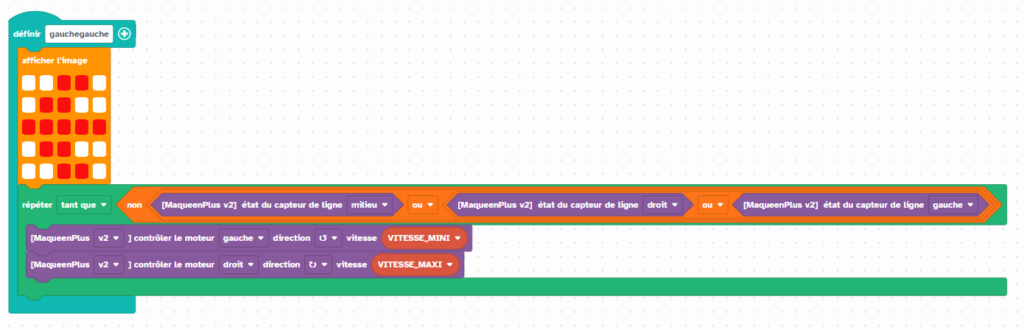
Rajoute des fonctions pour tourner plus droitePlus et gauchePlus qui vont pouvoir suivre la courbe en angle droit :
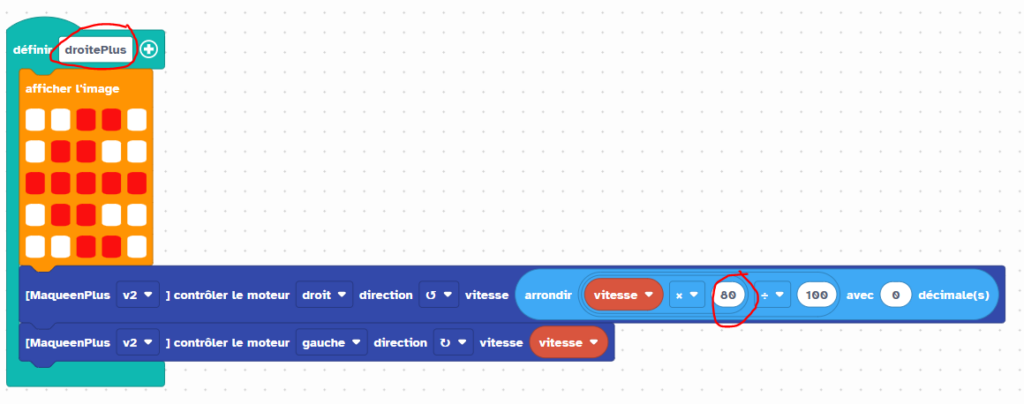
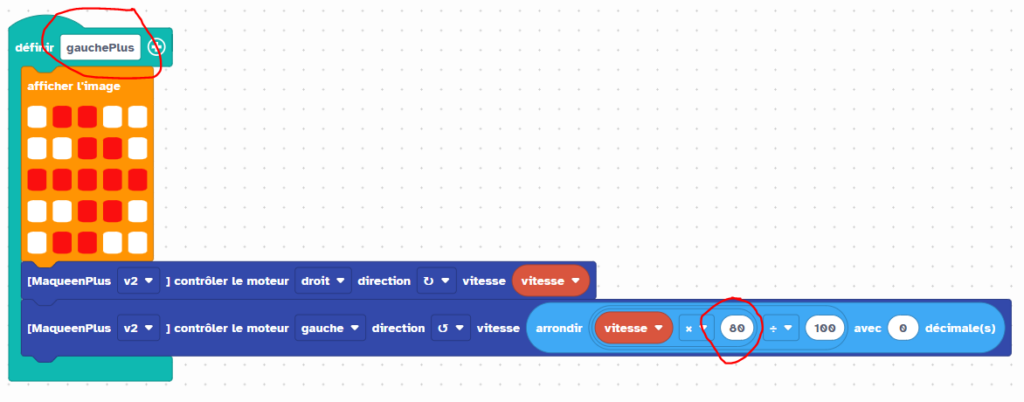
Puis modifie ton programme pour prendre en compte les capteurs arrière droit et arrière gauche :

Puis téléverse ton programme pour tenter un parcours difficile :
Tu peux jouer avec la vitesse :
Ou sur le pourcentage