
Ce que tu vas apprendre :
Apprendre à utiliser :
- Un capteur de lumière
- Deux moteurs à courant continu
Ta mission :
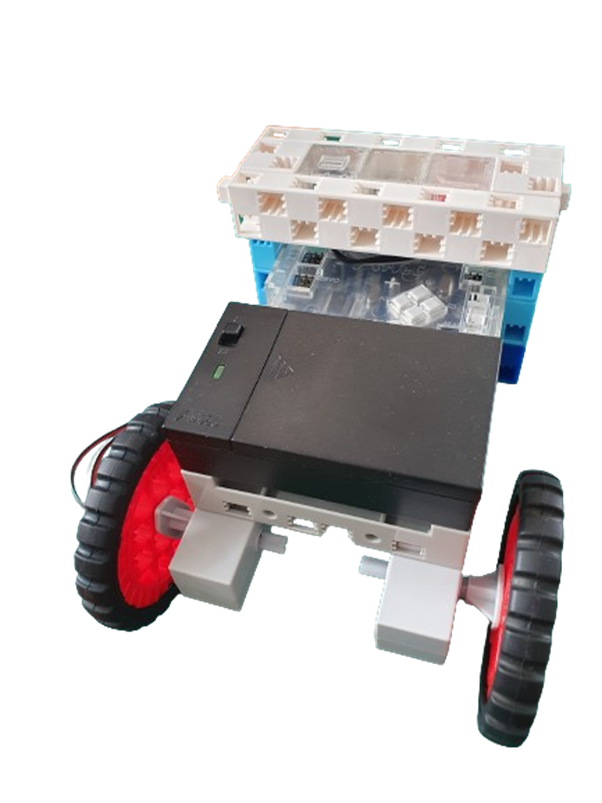
Apprendre à construire un robot qui obéit au doigt.
Liste des pièces avant la construction
 | Carte ARDUINO | 1 |
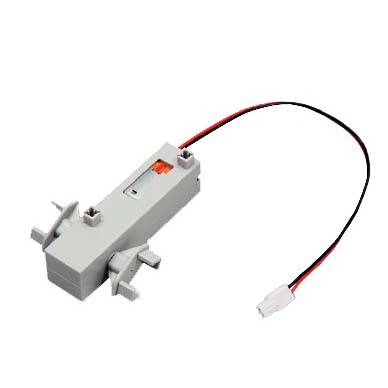
 | Batterie | 1 |
 | Cable USB | 1 |
 | Moteur CC plus les deux moyeux | 2 |
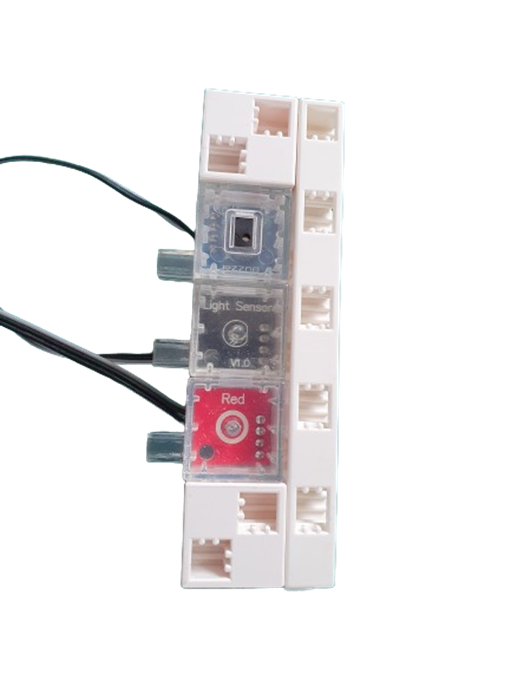
 | Capteur de lumière | 1 |
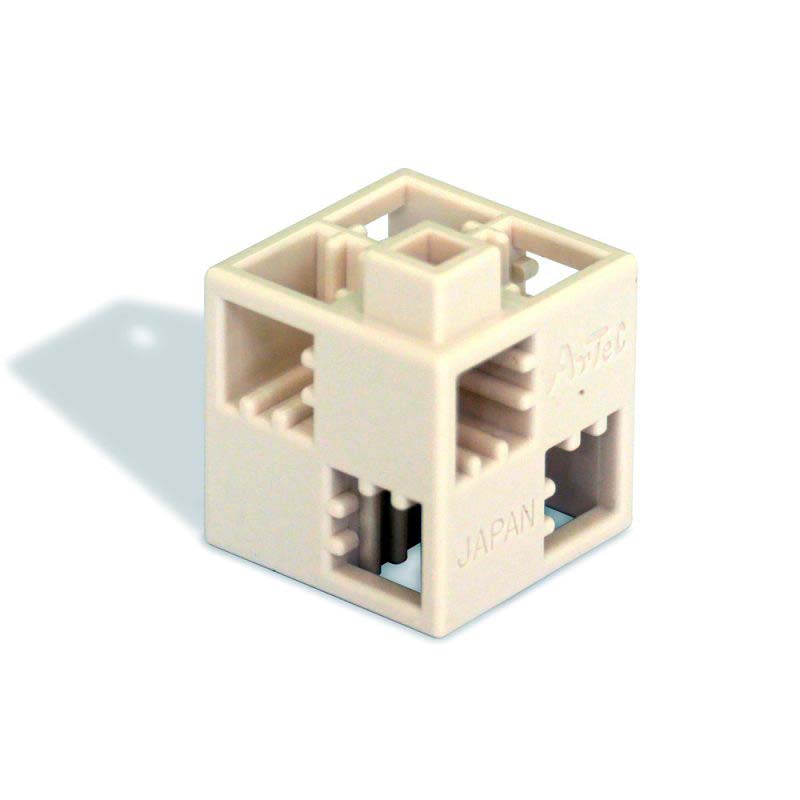 | Bloc blanc ou de différentes couleurs | 6 |
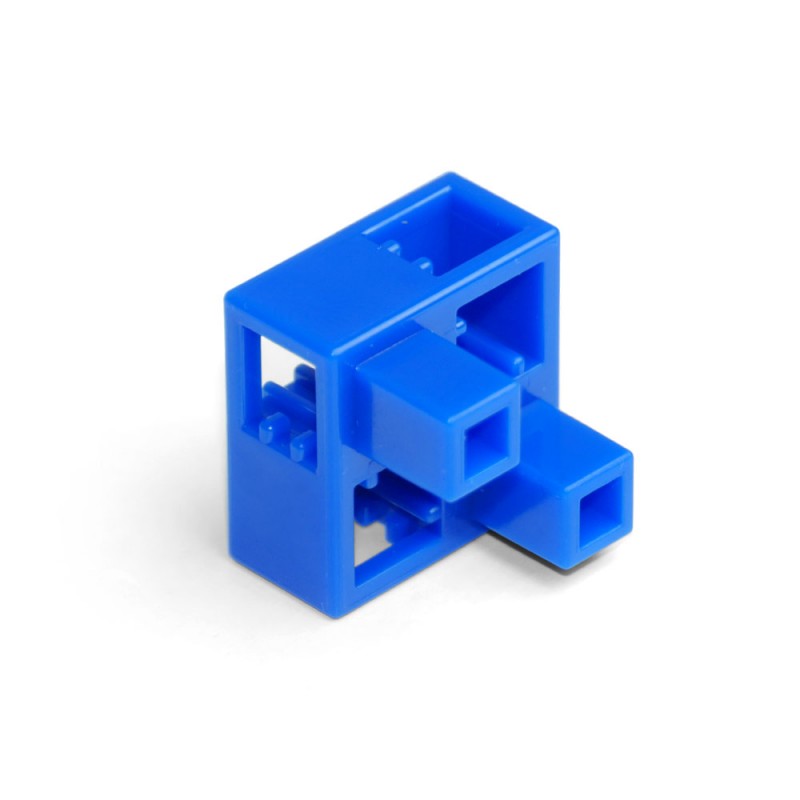 | Demi-cube | 2 |
 | Demi-cube | 4 |
 | Disque | 1 |
 | LED rouge | 1 |
 | Buzzer | 1 |
 | Roue | 2 |
 | barre | 2 |
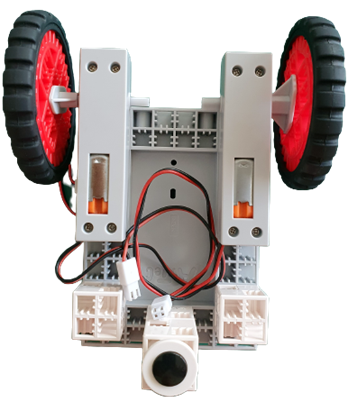
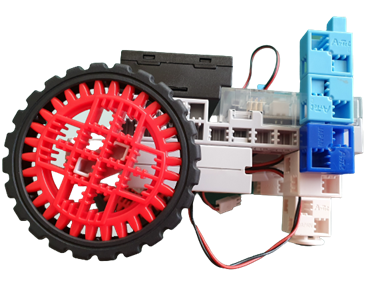
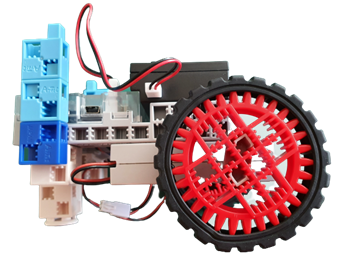
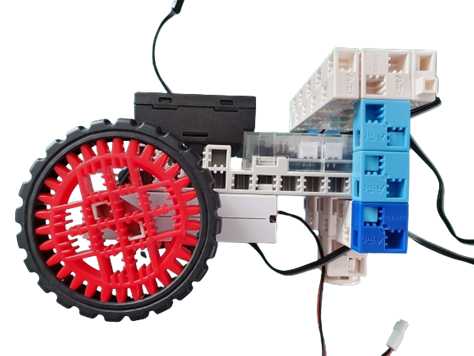
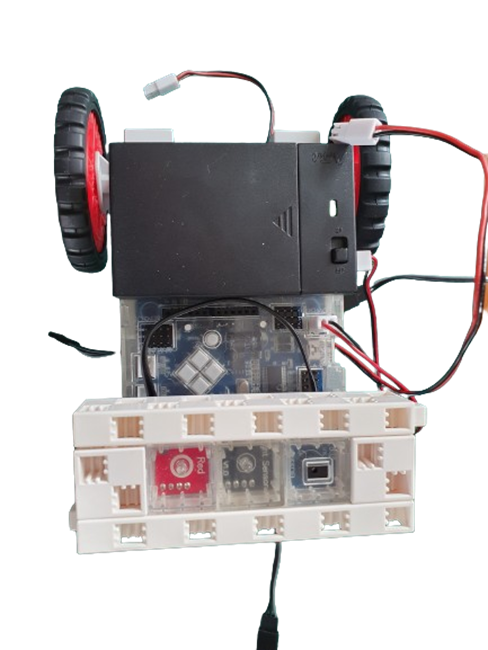
Construction de ton robot :




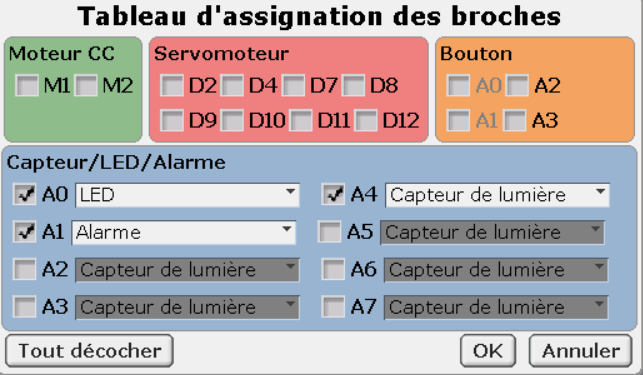
Le tableau des assignations
Clique sur le menu Edition en haut de l’écran et choisis Paramètres des ports
Clique ensuite sur le bouton Tout décocher .
Puis indique tous les éléments que tu as rajoutés sur ton robot.
Réveiller ton robot
A la mise sous tension de ton robot, celui-ci est dans un état « endormi ». En mettant le doigt sur le capteur de lumière, le robot se réveille et allume une LED.
Ta mission
Ton robot se réveille dès qu’il détecte la présence de ton doigt sur le capteur de lumière puis allume une LED.
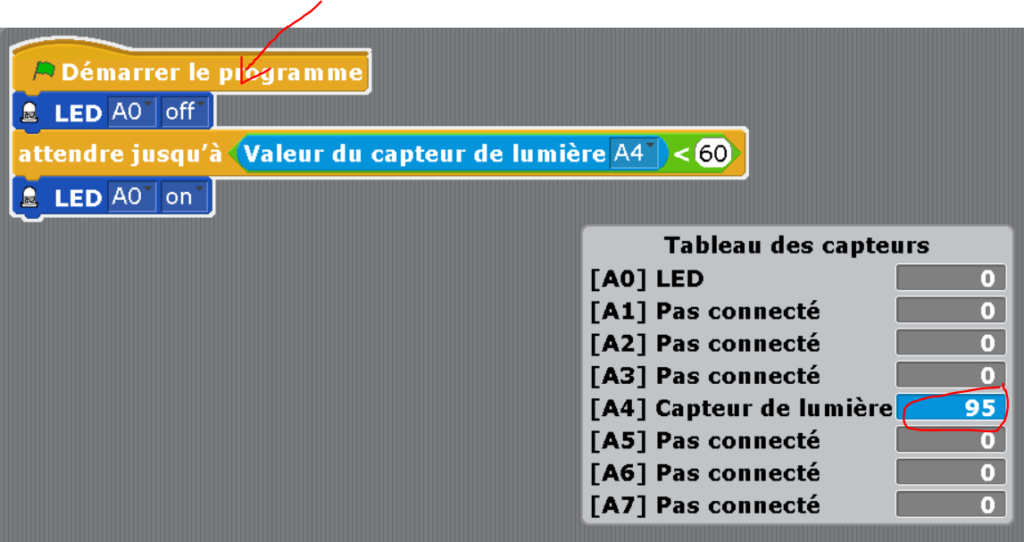
Tu dois réaliser le programme suivant après « Démarrer le programme » :

- Eteindre la LED 0
- Détecter la présence de ton doigt sur le capteur de lumière
- Allumer la LED 0
Dès que tu as écrit ton programme, clique sur le menu Exécuter en haut de l’écran et choisis Transférer.
Une solution
Teste ton code en activant le mode test :
Visualise que ton capteur de lumière fonctionne correctement en posant ton doigt sur le capteur de lumière et vérifie la valeur sur le tableau des capteurs.
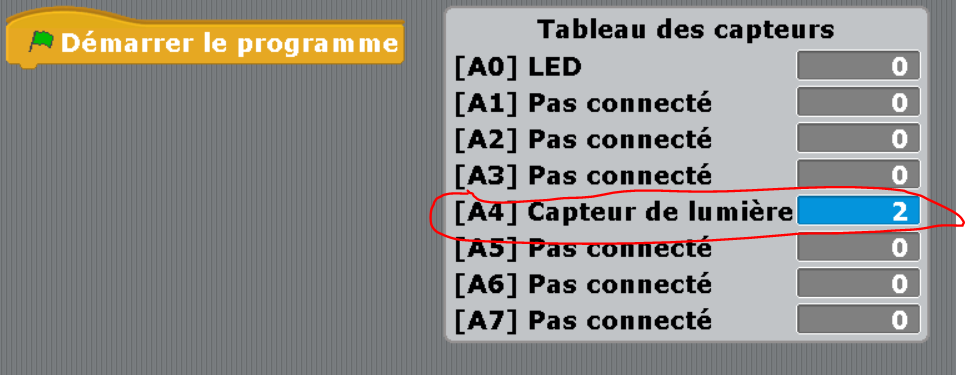
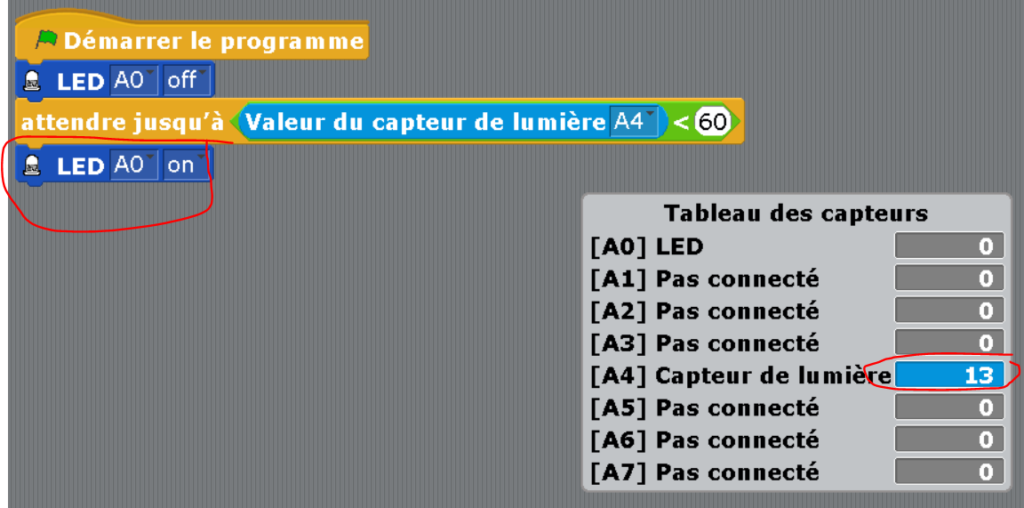
Vérifie la valeur du capteur de lumière sans ton doigt sur ce dernier :
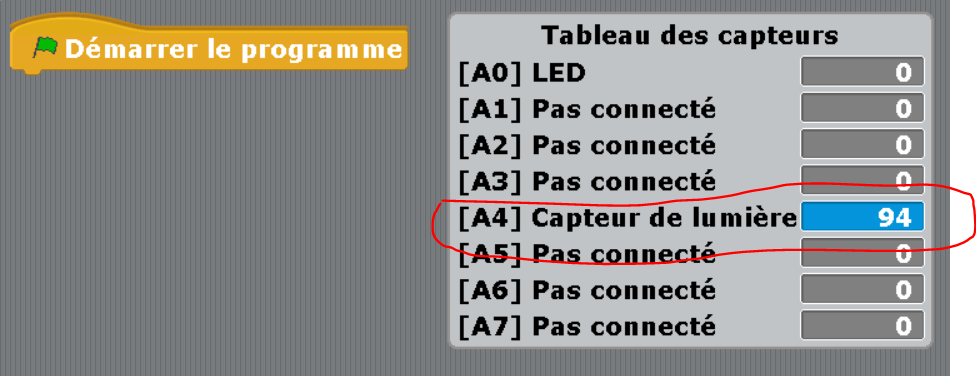
Puis vérifie la valeur du capteur de lumière avec ton doigt sur ce dernier :
Exécute ce programme par un clic sur Démarrer le programme :
Pose ton doigt sur le capteur de lumière, la LED doit s’allumer :
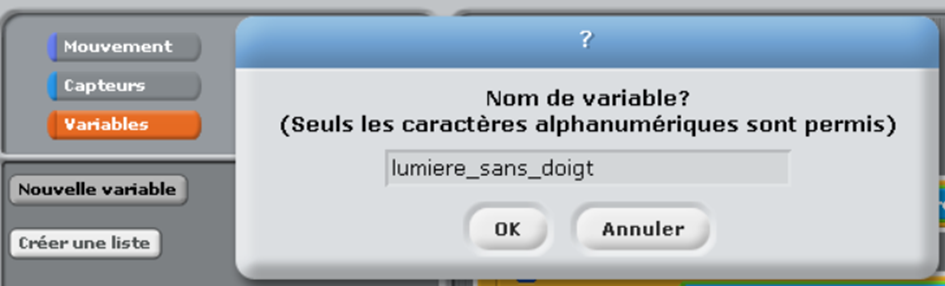
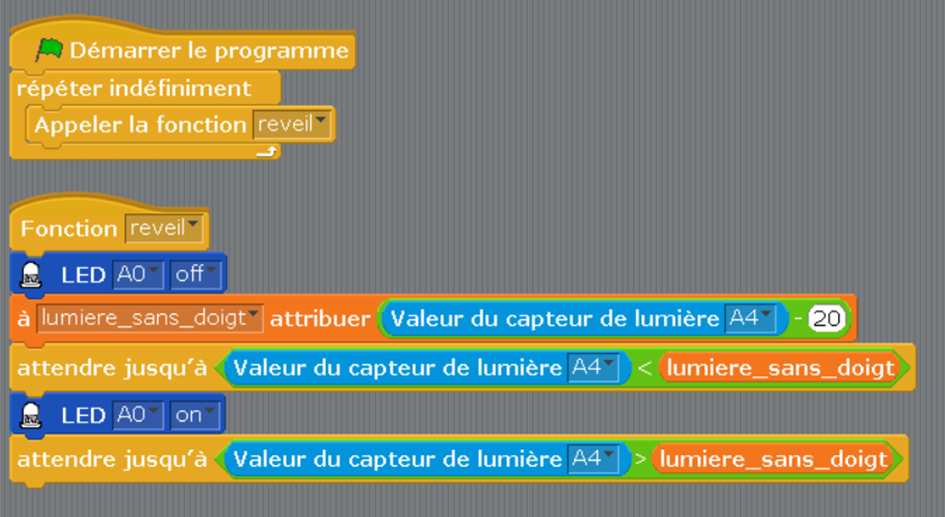
Pour que ton programme fonctionne dans toutes les situations de lumière ambiante, tu vas créer une variable pour mémoriser la valeur de la lumière ambiante :
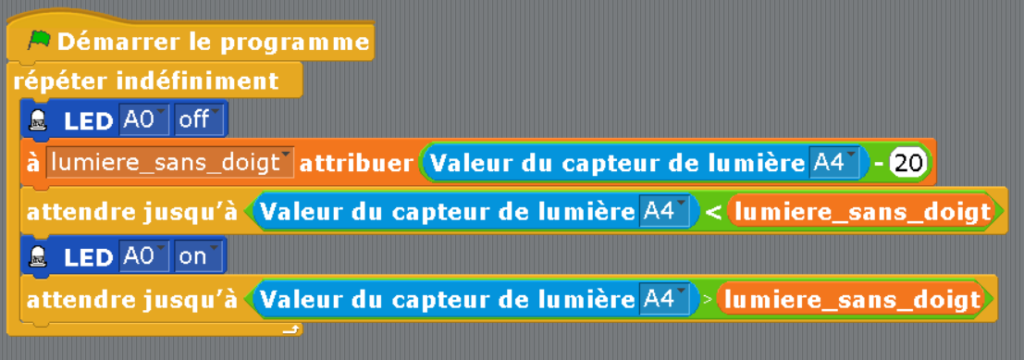
Mémorise ainsi la valeur de la lumière ambiante dans cette variable :

Ainsi tu peux détecter la présence du doigt sur le capteur avec une tolérance de variance de la lumière de 20 :

Puis attendre que le doigt ne soit plus présent :

Dès que tu as écrit ton programme, clique sur le menu Exécuter en haut de l’écran et choisis Transférer.
La LED 0 s’allume dès que tu mets ton doigt sur le capteur puis elle s’éteint dès que tu enlèves ton doigt.
Ta mission
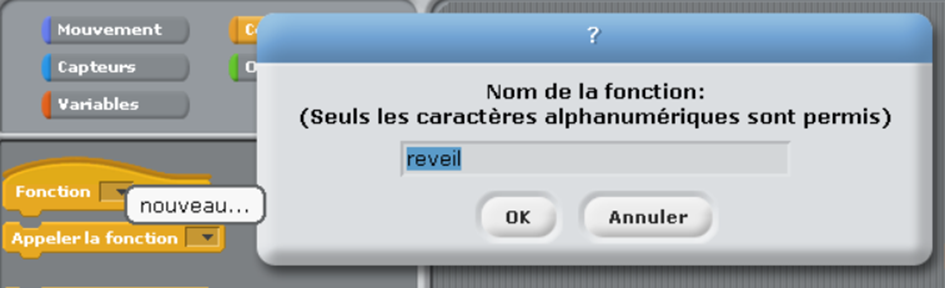
Tu vas utiliser cet alghorithme comme fonction pour le réveil de ton robot.
L’idée principale est d’attendre que l’utilisateur pose son doigt sur le capteur de lumière, puis d’allumer la LED 0 pour indiquer que le robot est prêt à être utilisé.
Une solution
Dès que tu as écrit ton programme, clique sur le menu Exécuter en haut de l’écran et choisis Transférer.
Passer un ordre à ton robot
Ta mission
Maintenant que tu as la possibilité de réveiller ton robot, tu vas lui donner des ordres par l’appui sur le capteur de lumière. Deux appuis et ton robot se rendort.
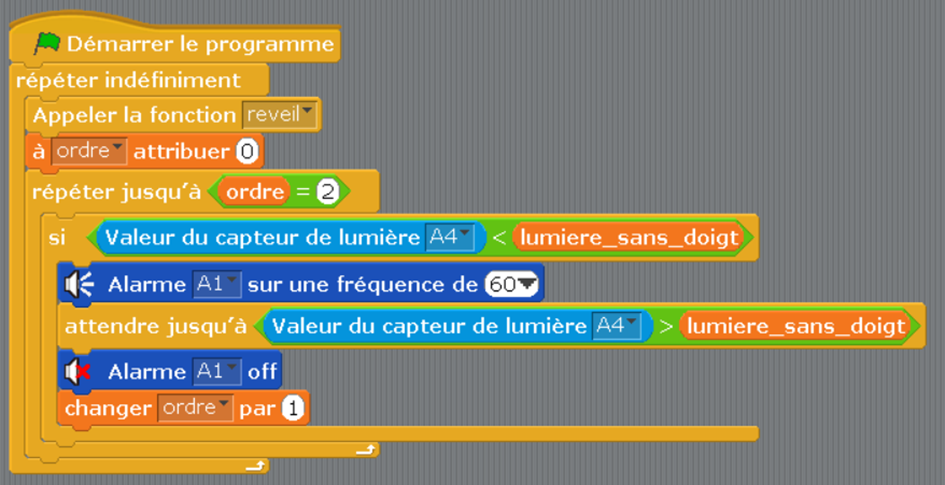
Une solution
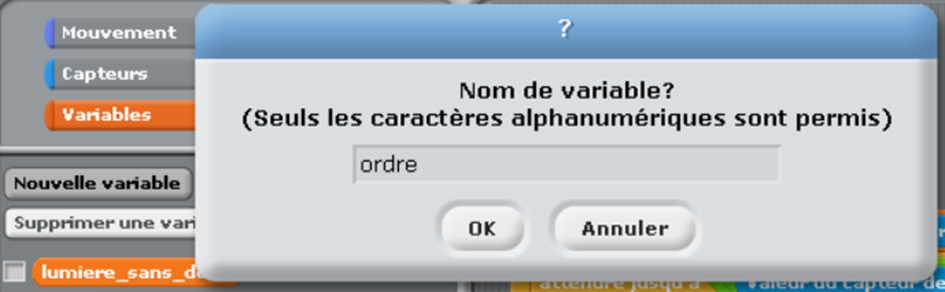
Tu dois créer une variable pour mémoriser l’ordre donné par l’utilisateur de ton robot :
Comme tu l’as expérimenté précédemment, détecte l’appui sur le capteur de lumiére puis son relachement afin de mémoriser l’ordre.
Active le mode test pour tester ton programme :
Vérifie que la variable « ordre » est bien cochée pour qu’elle soit visible :

Dans la partie droite en haut de l’écran, visualise les valeurs de « ordre » en fonction de la progression de ton programme.
Au lancement de ton programme « ordre » est égal à la valeur zéro.

Réveille ton robot en posant ton doigt sur le capteur de lumière.
Puis pose à nouveau ton doigt sur le capteur, tant que ton doigt est sur le capteur tu entends le buzzer, dès que tu relaches ton doigt du capteur, la variable « ordre » s’incémente de la valeur 1.

Si tu appuies de nouveau ordre s’incrémente à 2 et le robot s’éteint :
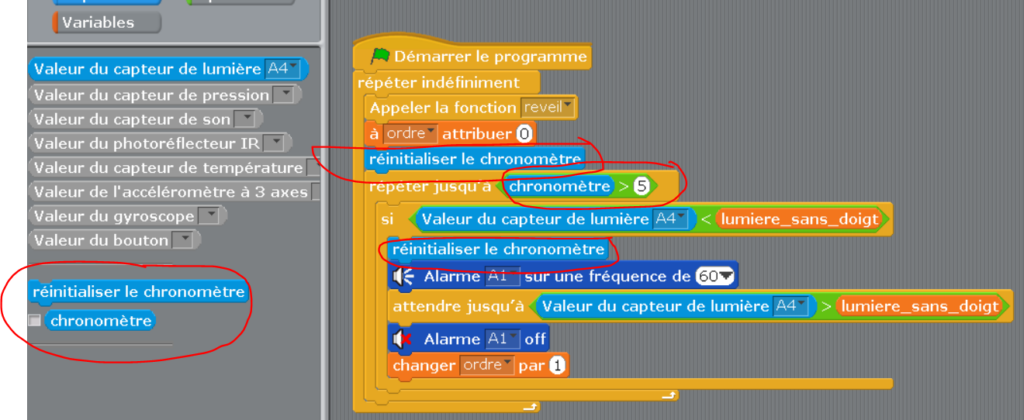
Endormir ton robot
Ton robot doit s’endormir si tu ne passes plus d’ordre au bout d’un certain temps. Pour cela tu utilises le chronomètre pour mesurer le temps pendant lequel aucun ordre n’est donné :
Dès que tu as écrit ton programme, clique sur le menu Exécuter en haut de l’écran et choisis Transférer.
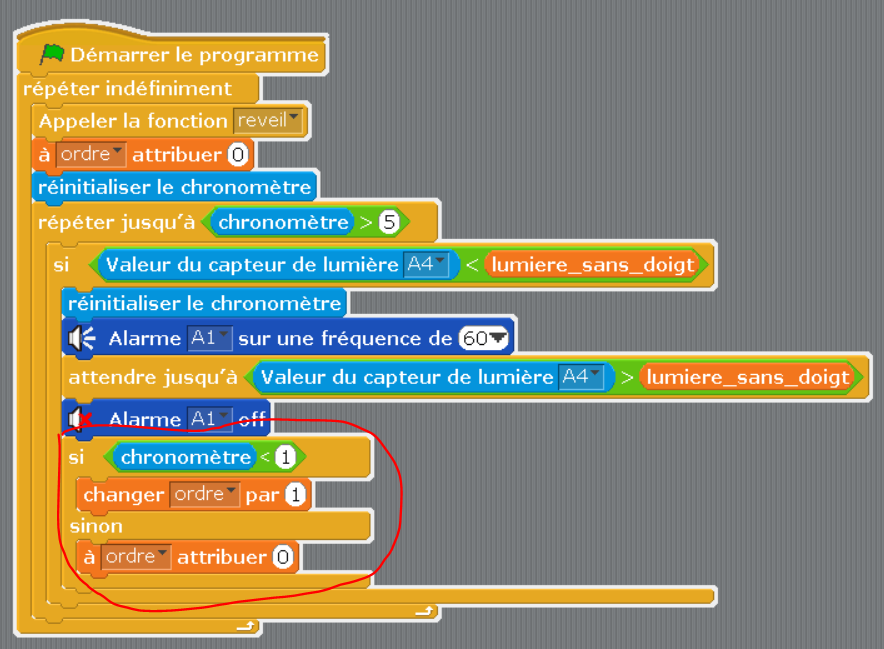
Comment valider un ordre
Ta mission
Pour valider l’ordre donné, tu utilises un appui plus long, par exemple plus d’une seconde :
Dès que tu as écrit ton programme, clique sur le menu Exécuter en haut de l’écran et choisis Transférer.
Faire bouger ton robot au doigt
Ta mission
Maintenant, tu peux faire bouger ton robot en lui donnant des ordres par des appuis successifs sur le capteur de lumière.
En appuyant plusieurs fois, tu peux donner des ordres à ton robot pour qu’il se déplace :
- En avant (1 appui court puis un appui long)
- En arrière (2 appuis courts successifs puis un appui long)
- À droite (3 appuis courts successifs puis un appui long)
- À gauche (4 appuis courts successifs puis un appui long)
Une solution
Crée une fonction « execution » pour déclencher les mouvements du robot en fonction de la valeur dans ordre :
- faire avancer
- faire tourner à droite
- faire tourner à gauche
- et le faire reculer
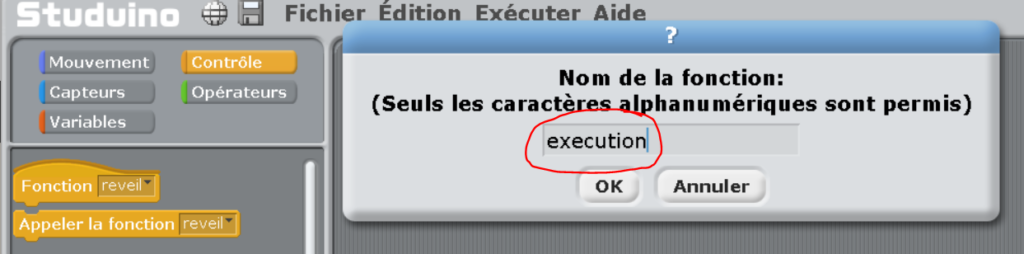

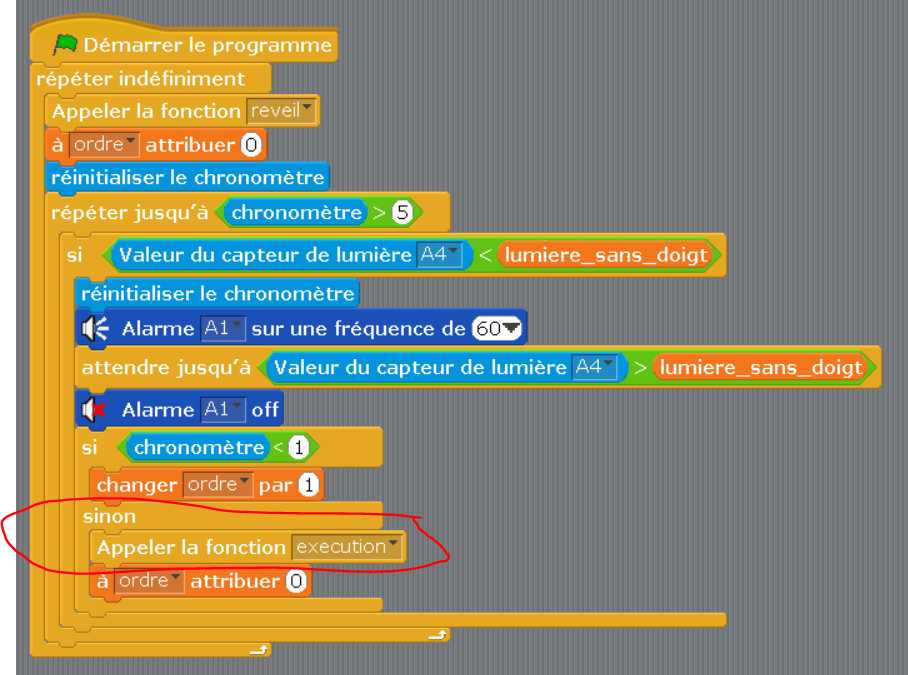
A toi d’écrire les fonctions avancer, reculer, droite, gauche.
Dès que tu as écrit ton programme, clique sur le menu Exécuter en haut de l’écran et choisis Transférer.