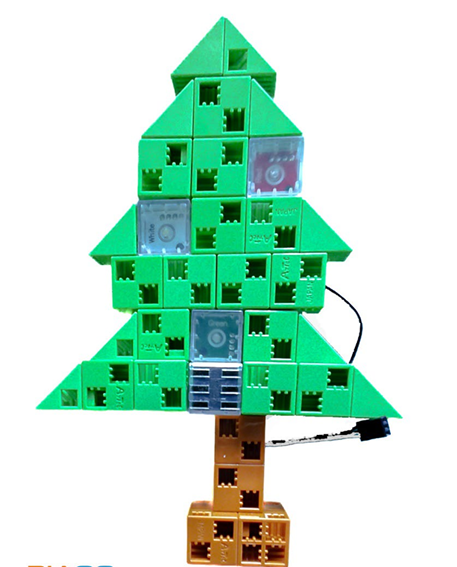
Concevoir un mini-projet : un « arbre de Noël » avec 3 LED qui s’allument au claquement de mains.
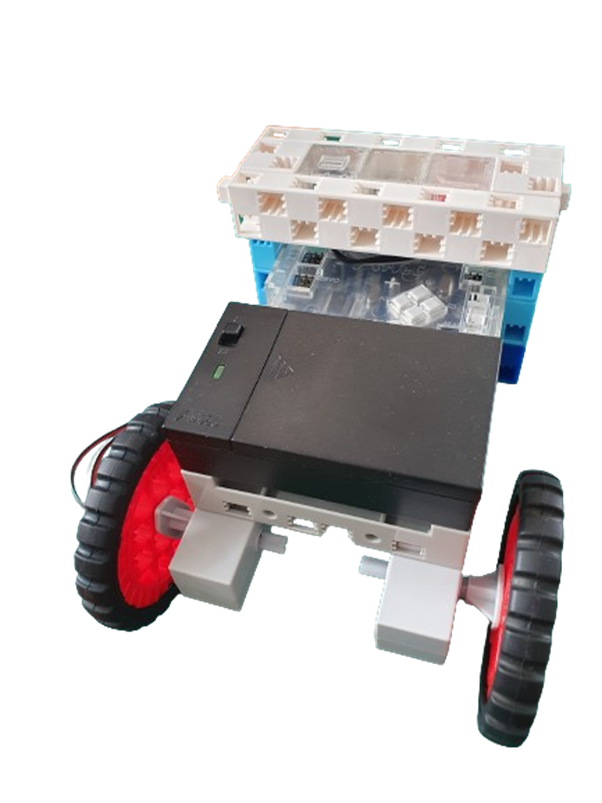
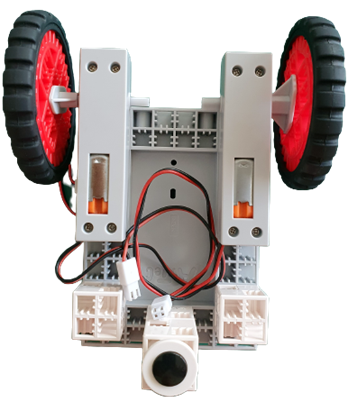
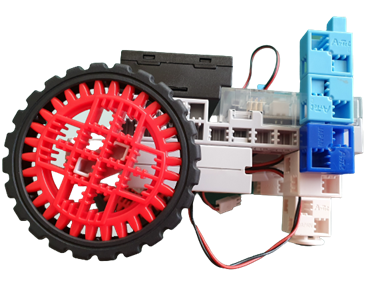
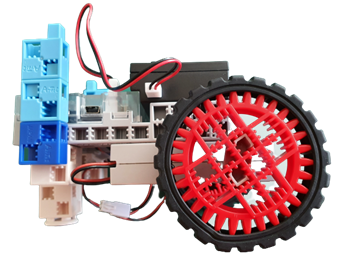
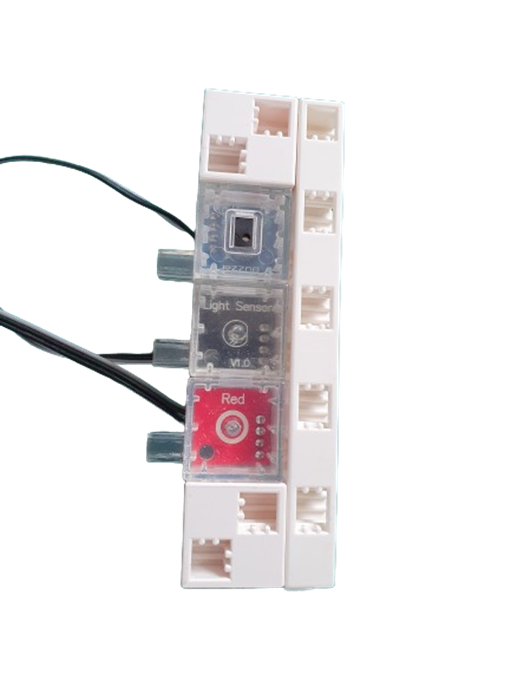
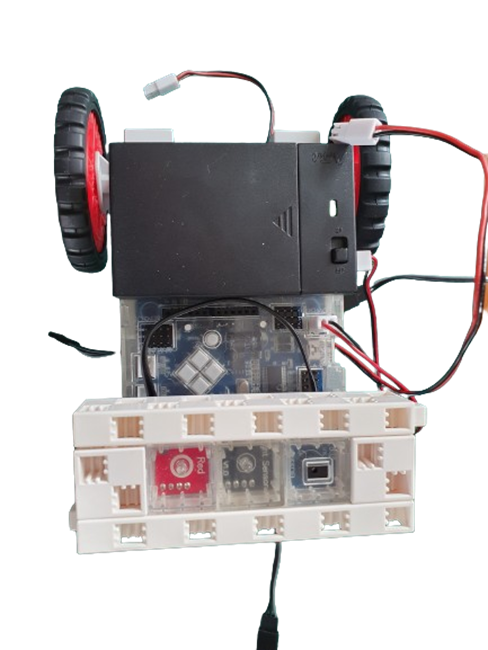
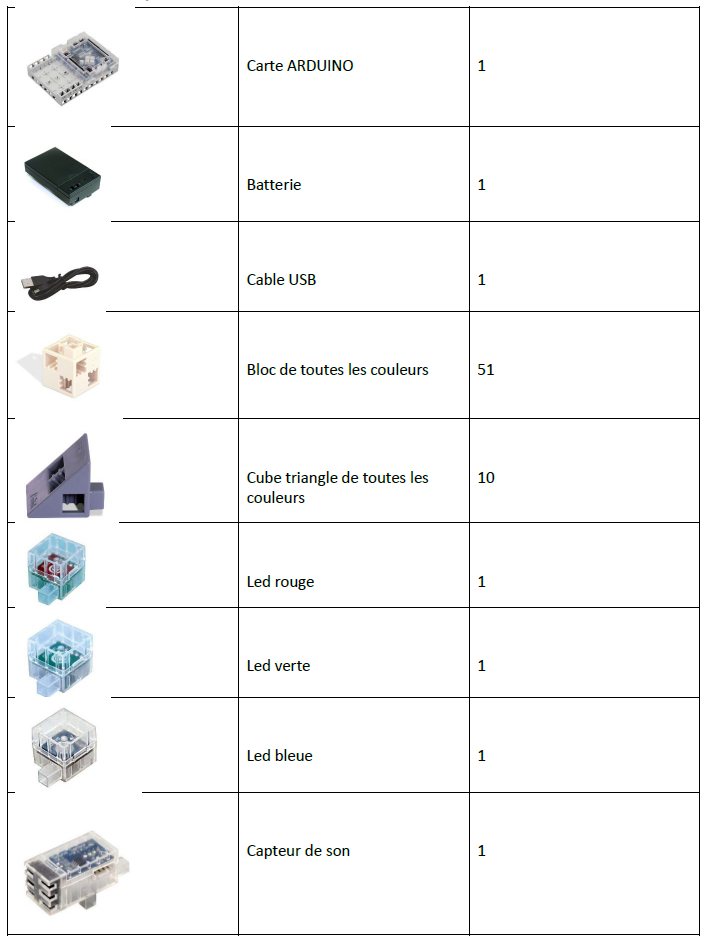
Liste du matériel
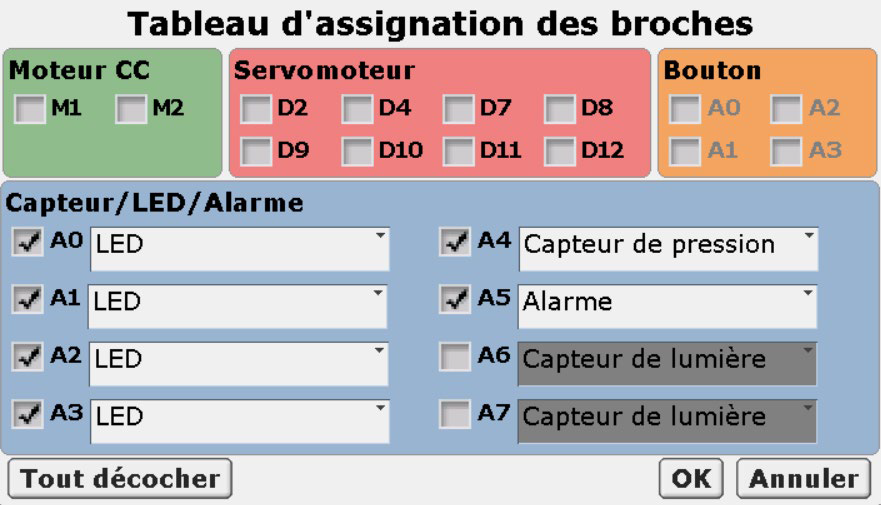
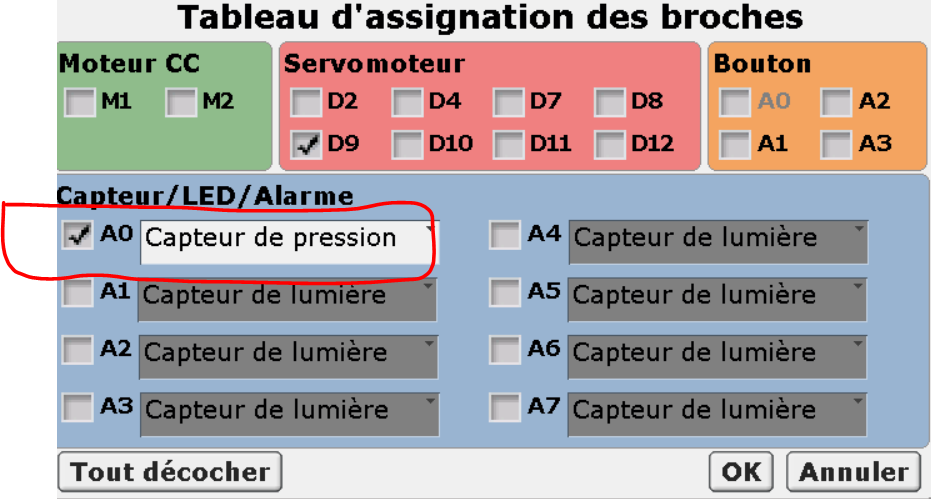
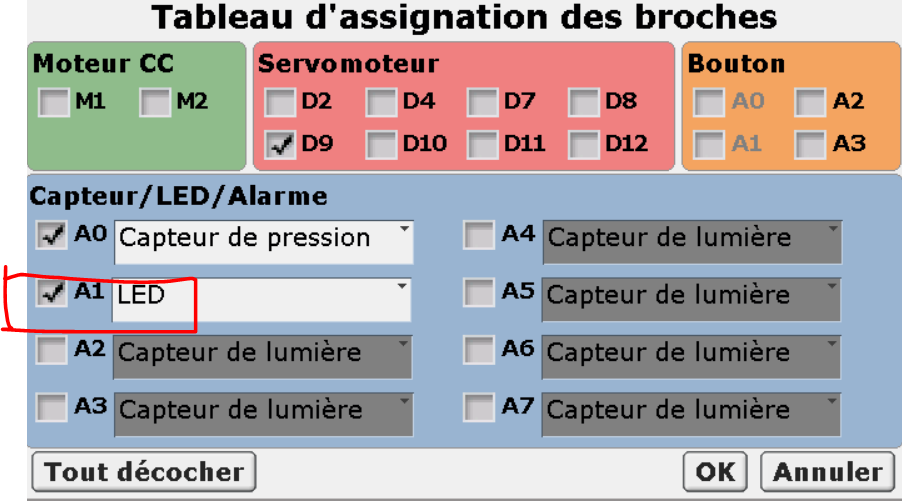
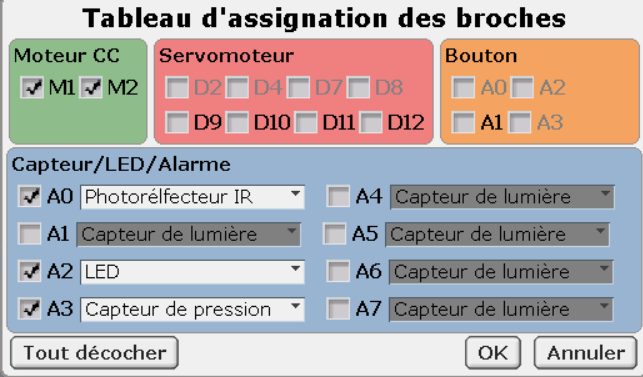
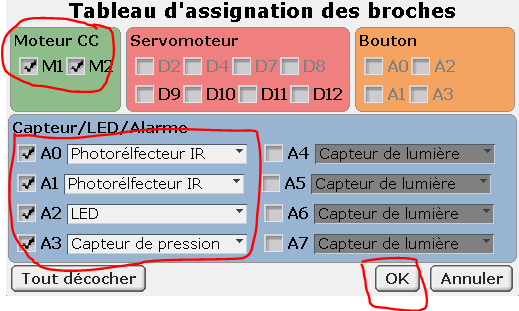
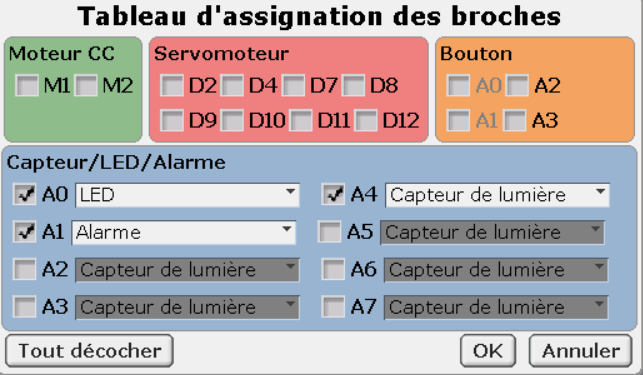
Etape 01 : Le tableau des assignations
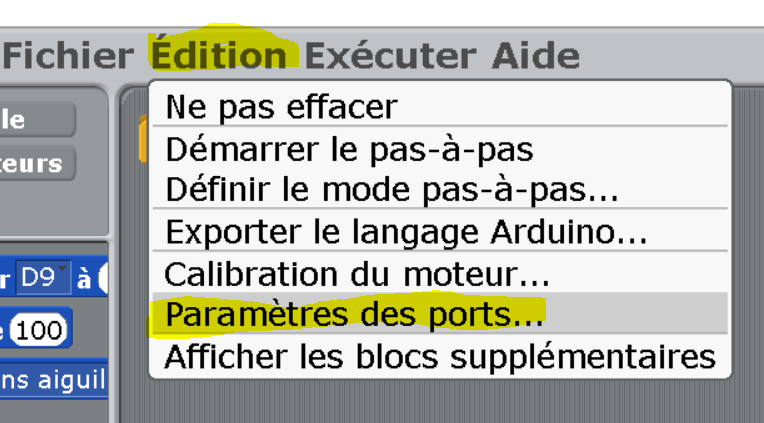
Clique sur le menu Edition en haut de l’écran et choisis Paramètres des ports.
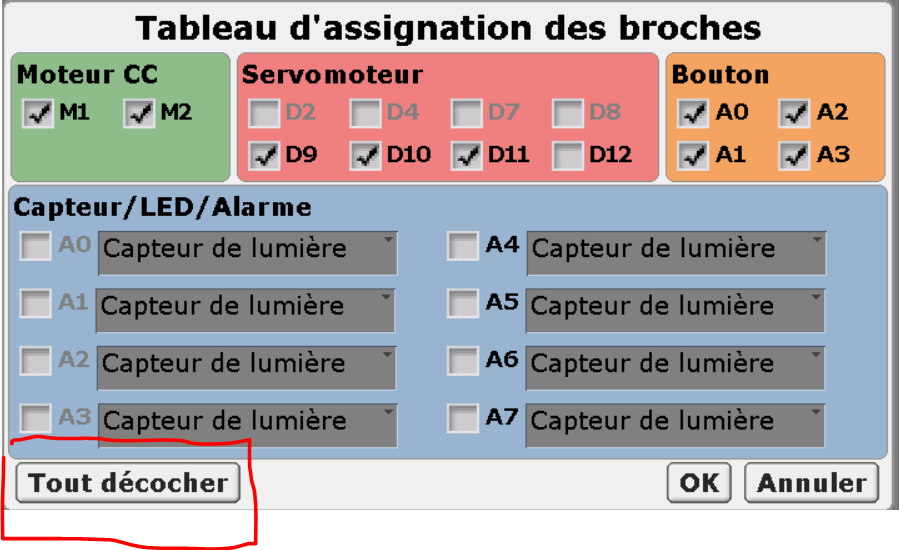
Clique ensuite sur le bouton Tout décocher .
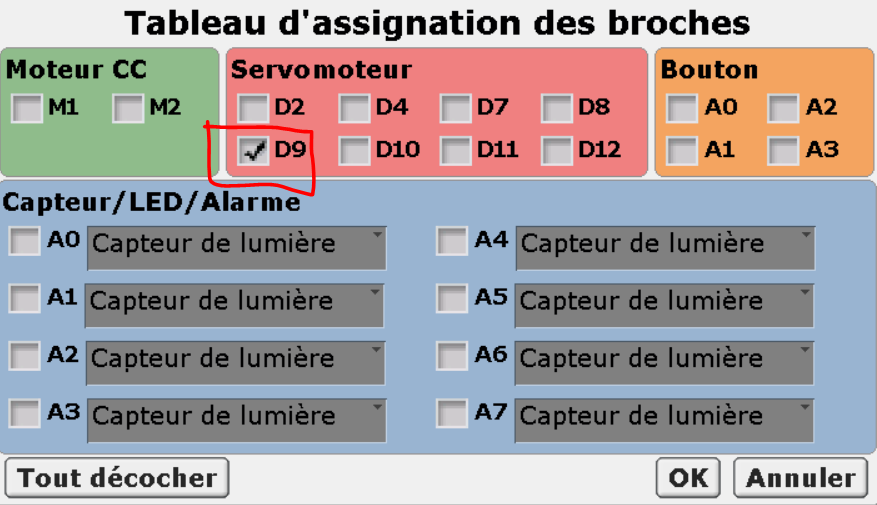
Puis indique tous les éléments que tu as rajoutés sur ton robot.
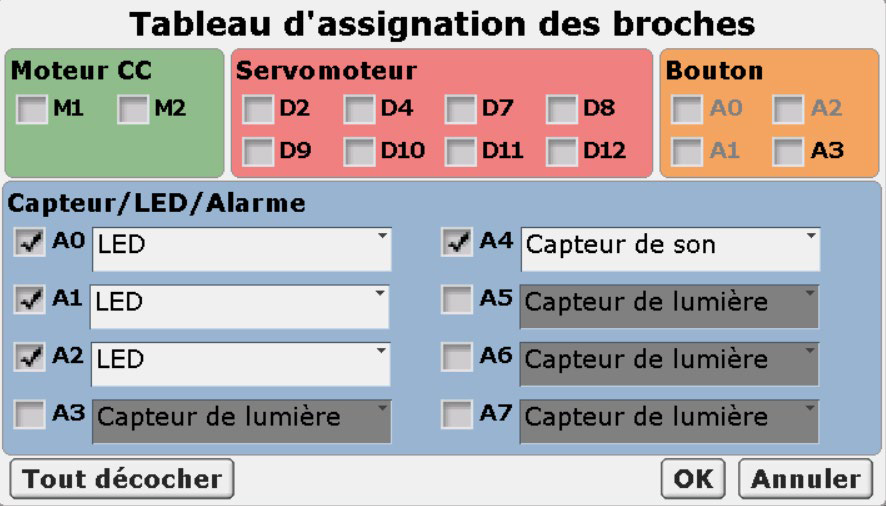
Cable et valide tes modifications en cliquant sur le bouton OK
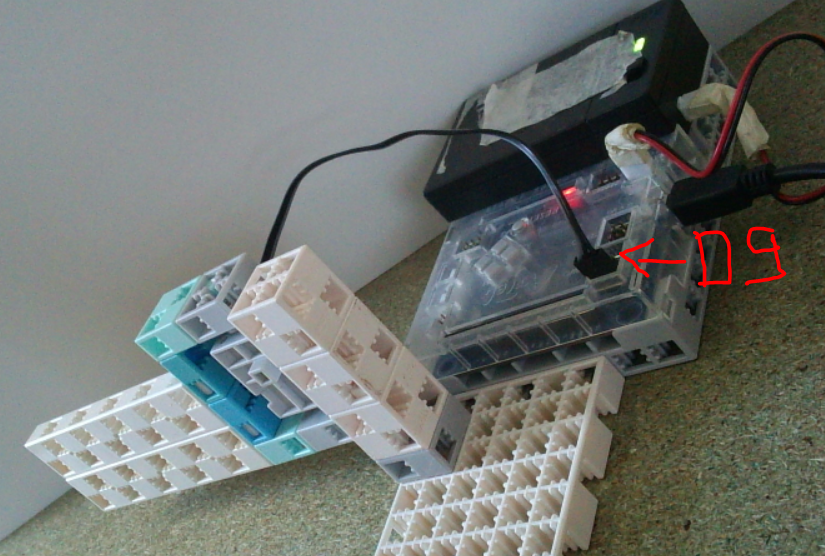
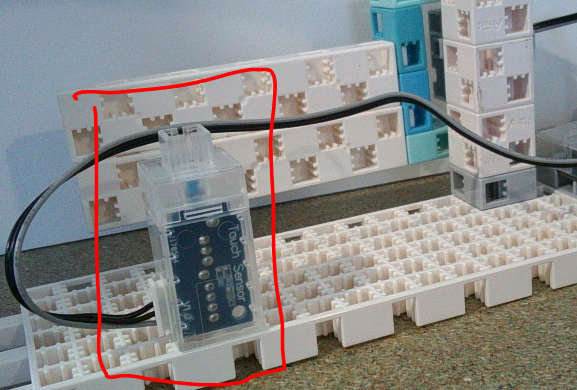
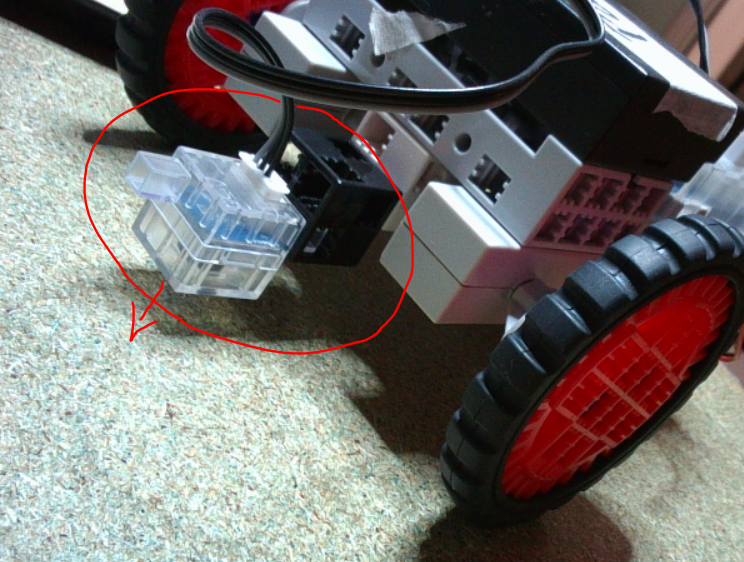
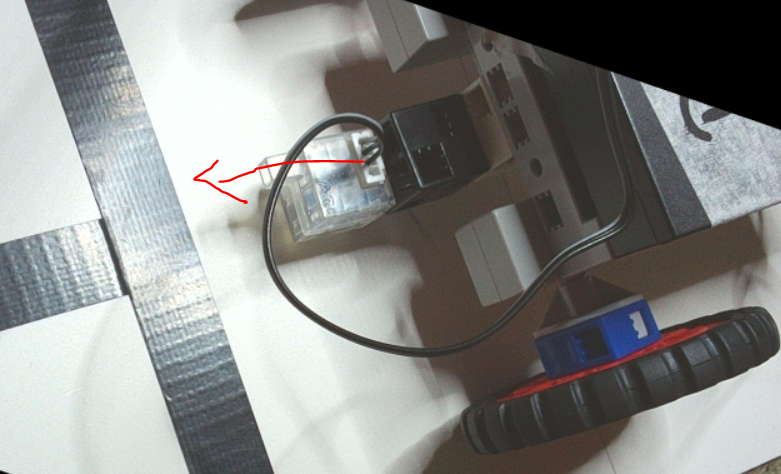
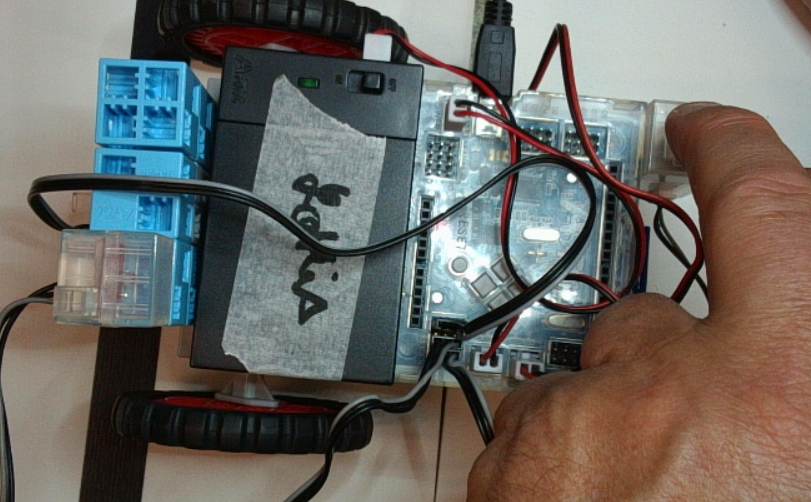
Attention au positionnement du câble gris sur la carte ARDUINO !!!
Etape 02 : Crée des animations
Tu vas créer 5 animations :
- Allume toutes les leds
- Eteins toutes les leds
- Allume la led0
- Allume la led1
- Allume la led2
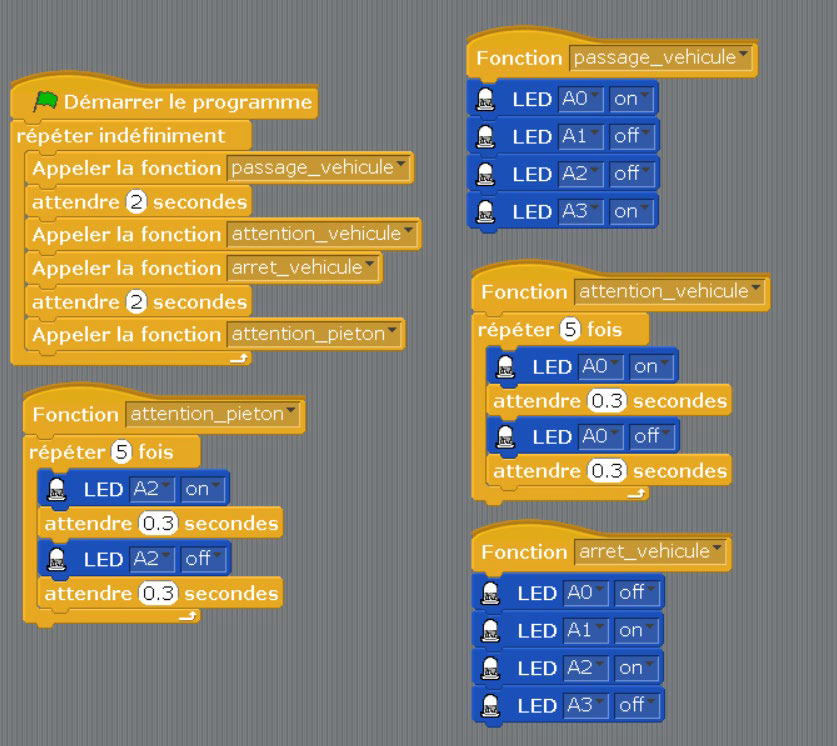
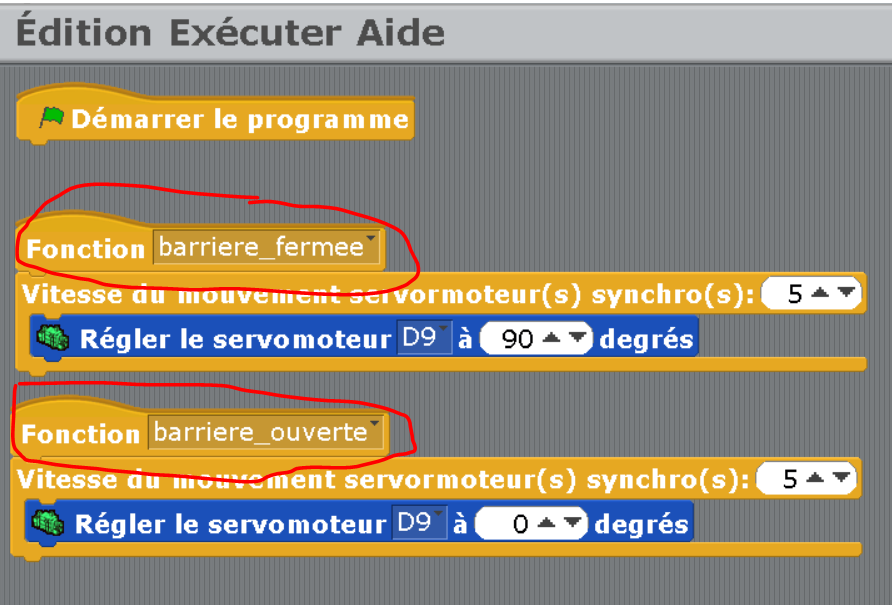
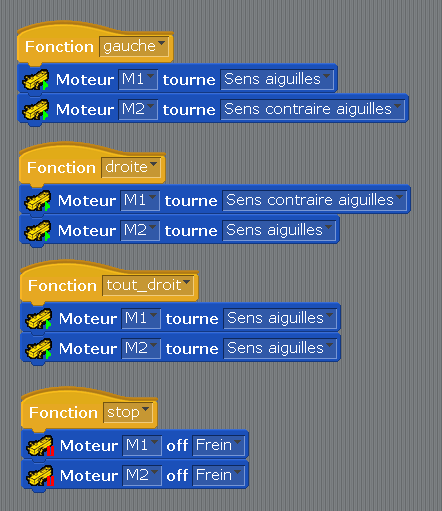
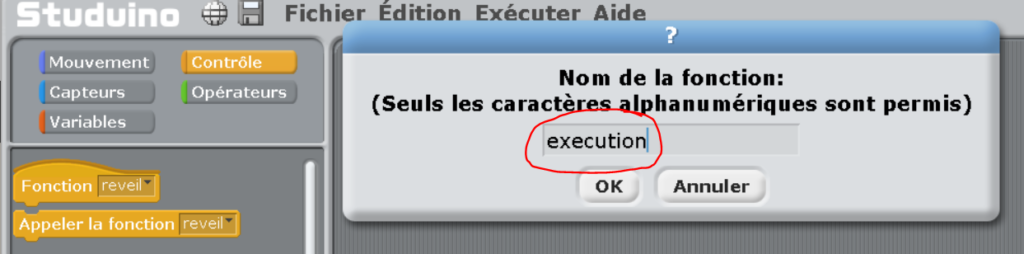
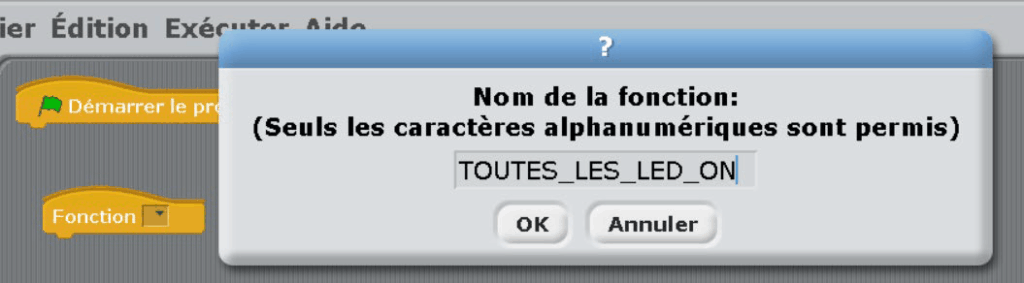
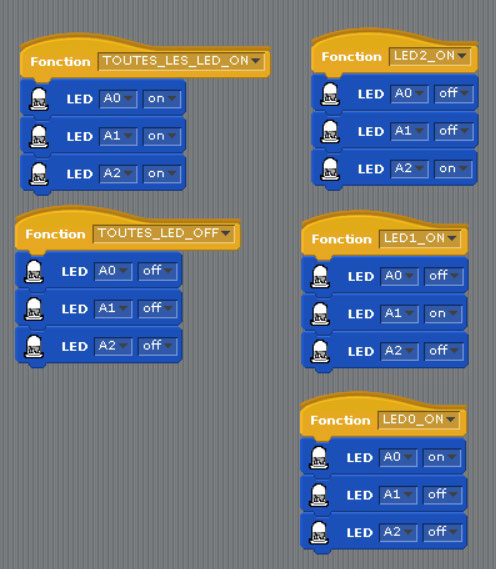
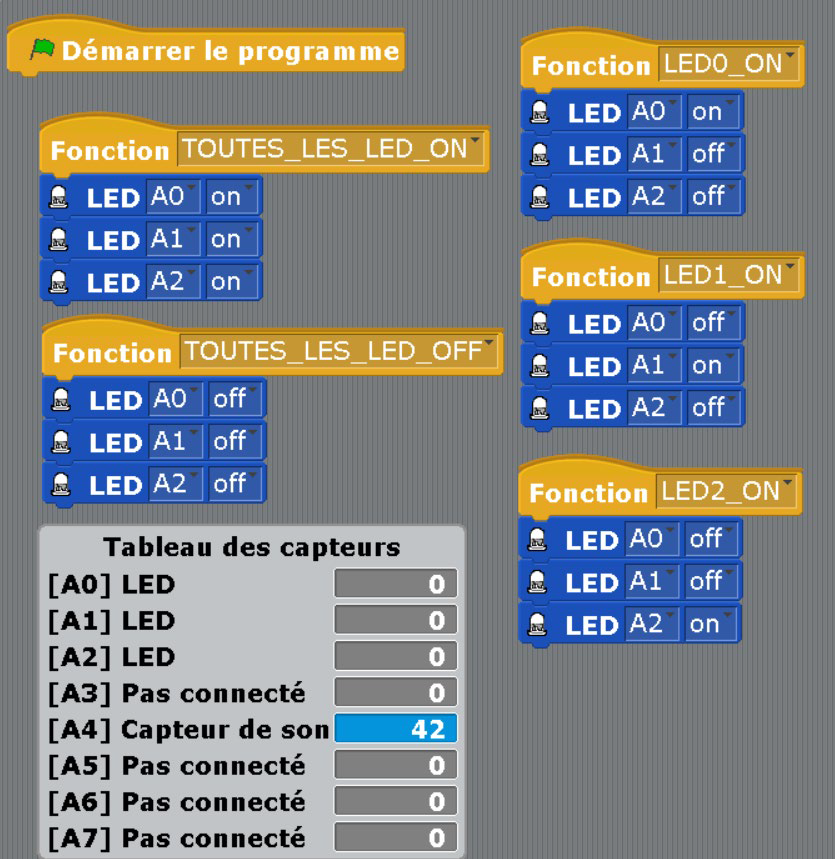
Pour cela tu vas créer 5 fonctions :
- TOUTES_LES_LED_ON
- TOUTES_LES_LED_OFF
- LED0_ON
- LED1_ON
- LED2_ON

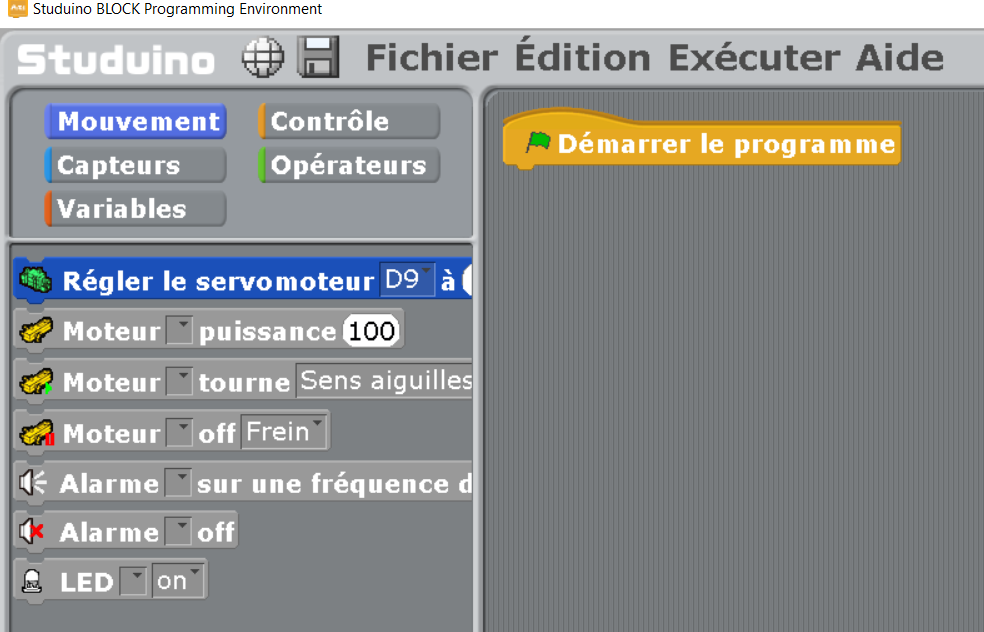
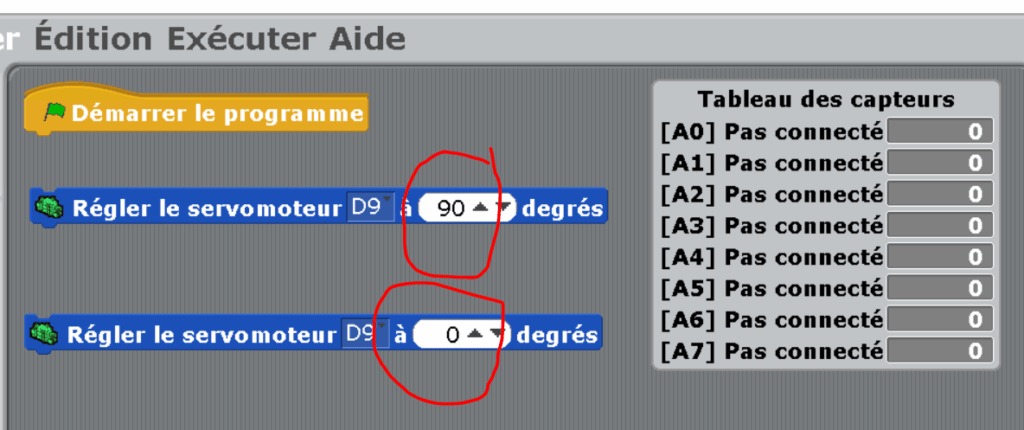
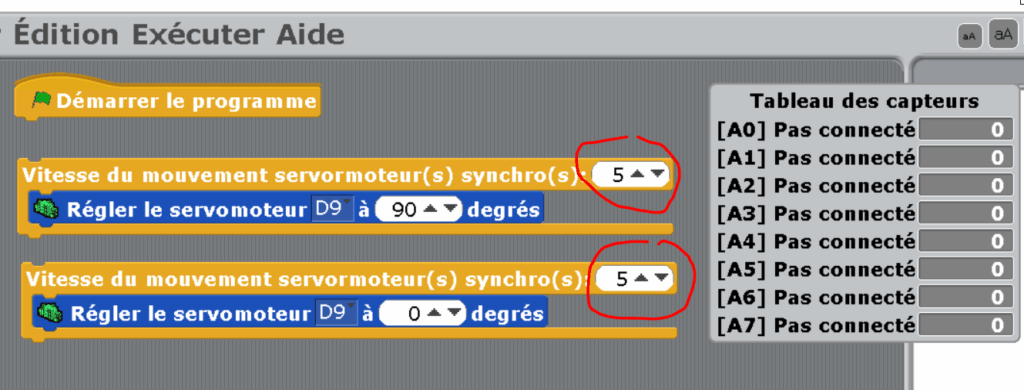
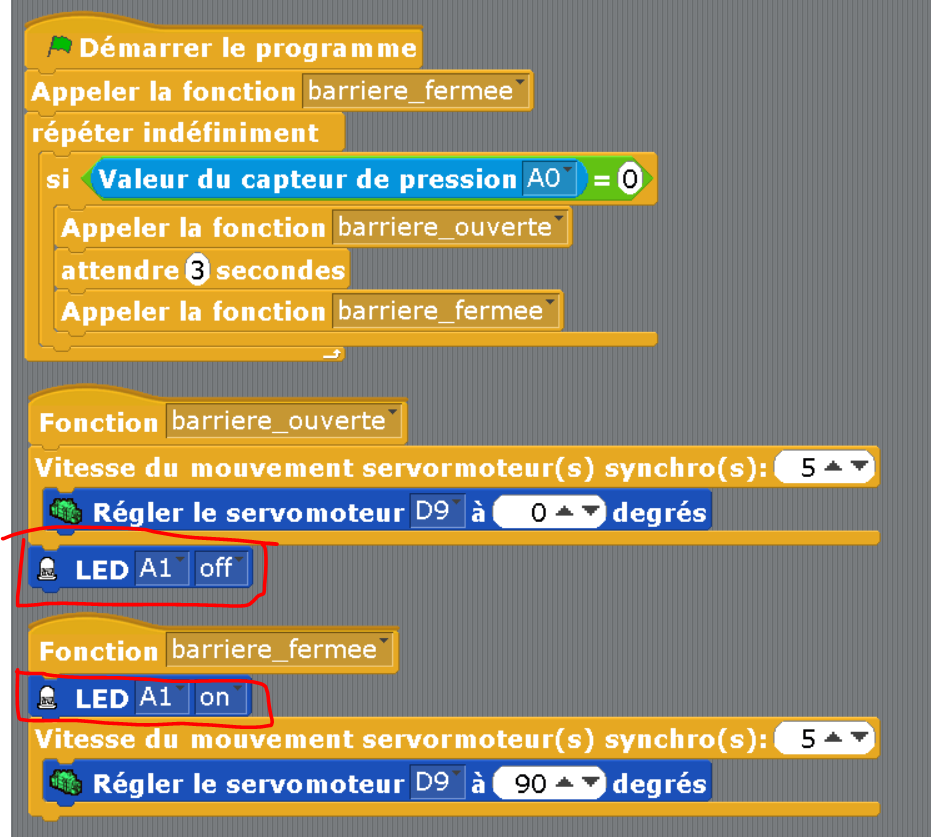
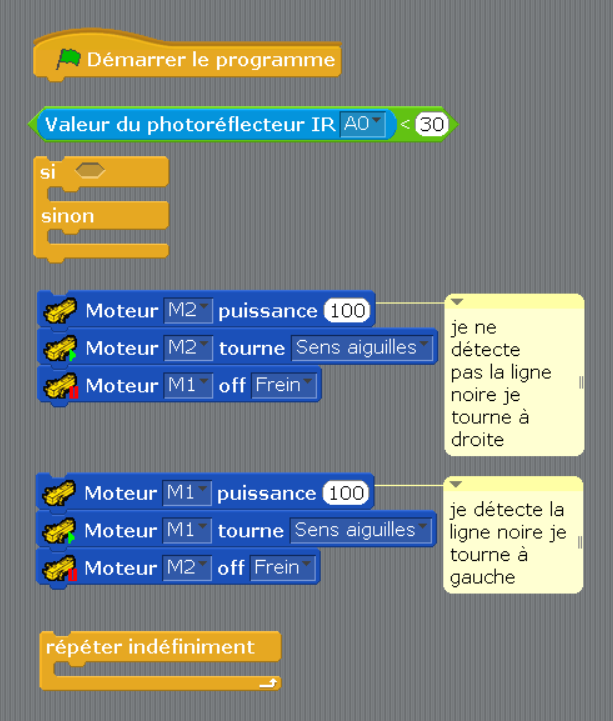
Code les 5 fonctions pour allumer ou éteindre les LEDs en choisissant « on » ou « off ».
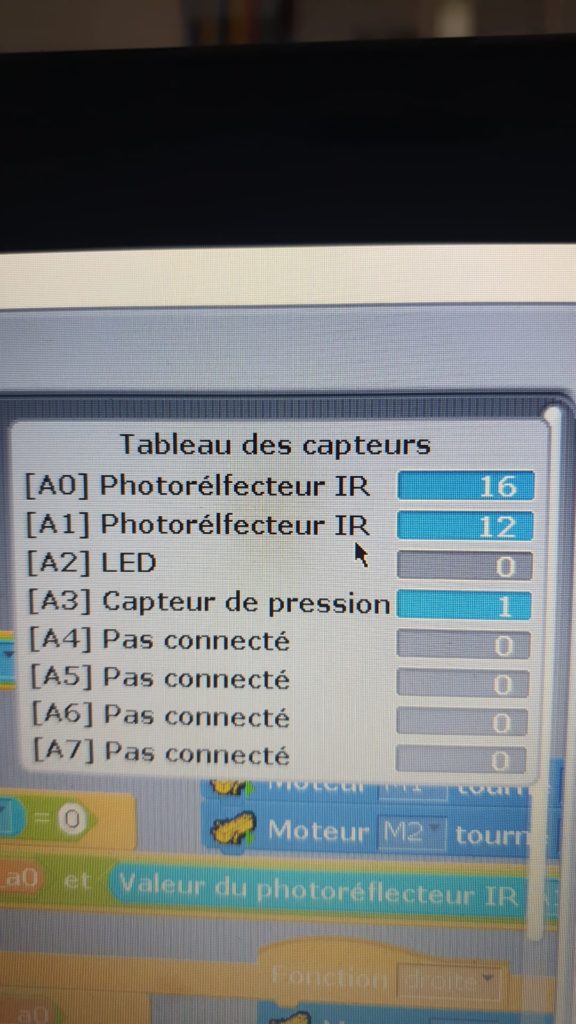
Puis testes le fonctionnement des fonctions en mode test :
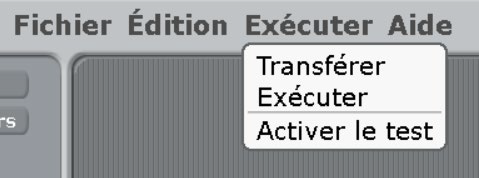
Après l’affichage du tableau des capteurs clique sur l’étiquette de chaque « Fonction » pour tester l’animation des diffréntes LEDs.
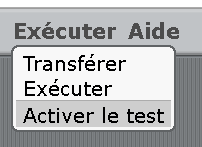
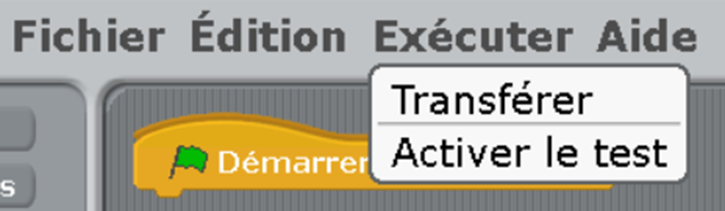
Clique sur « Exécuter » puis sur « Activer le test »
Tu animes ton arbre de Noël en cliquant sur chaque fonction.
Etape 02 : Teste le chronomètre
Ta mission :
Maintenant, automatises l’animation pour ne plus avoir besoin de cliquer sur chaque animation.
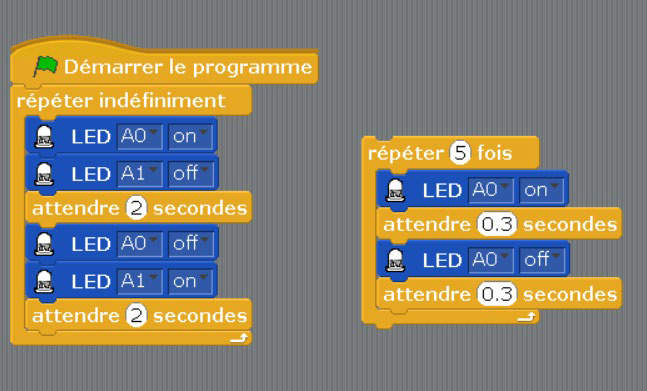
Code les animations pour qu’elles se succédent indéfiniment.
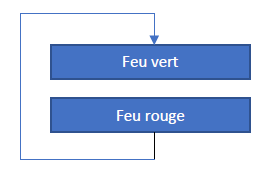
Une solution
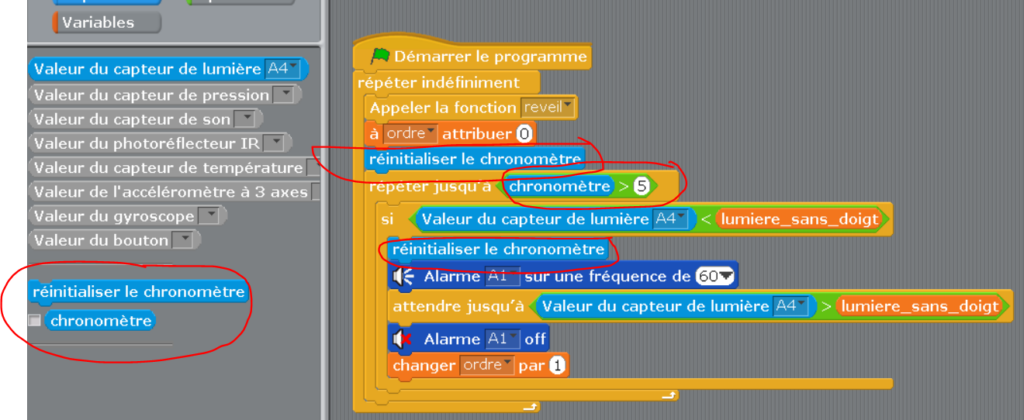
Automatise ton spectacle d’animation lumineux en utilisant le « chronomètre » pour cadencer ton animation.
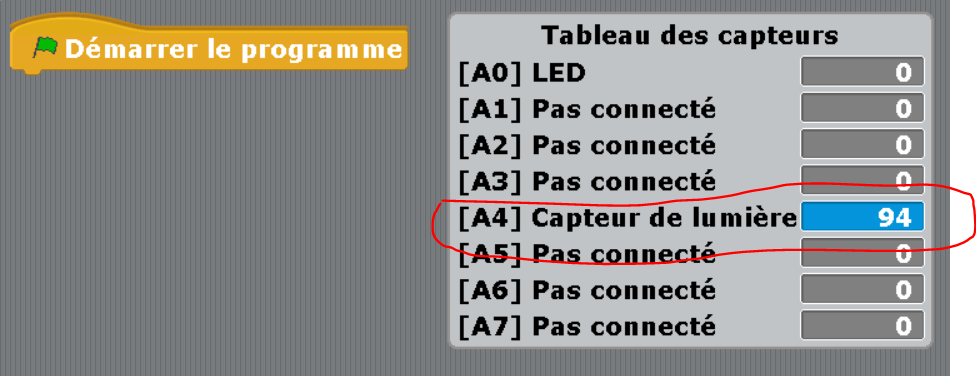
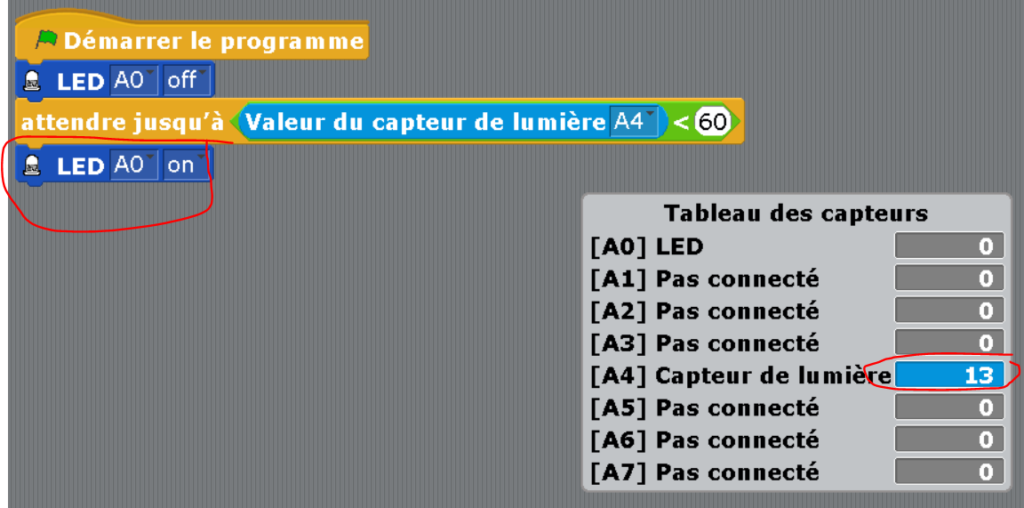
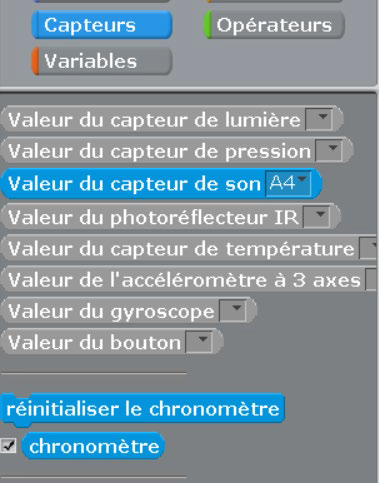
Teste le fonctionnement du « chronomètre ». Dans « Capteurs », coche l’affichage de « chronomètre ».
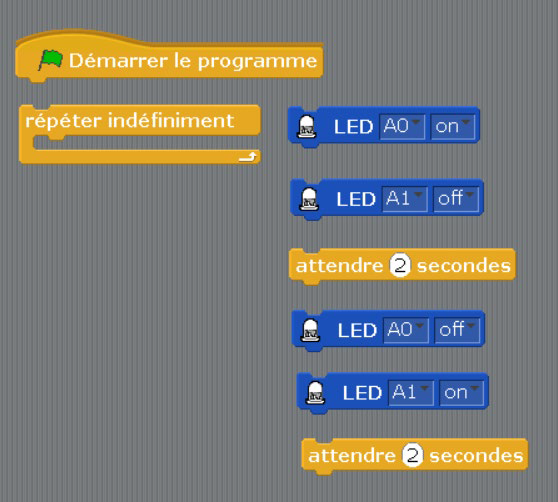
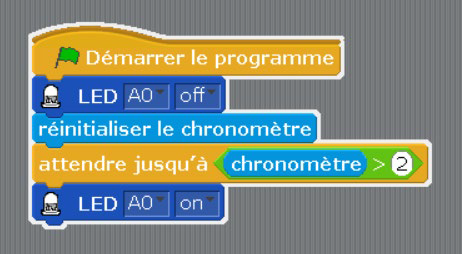
Utilise le « chronomètre » pour allumer ta LED au bout de 2 secondes.
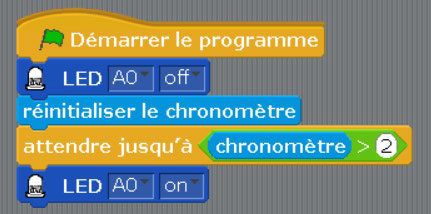
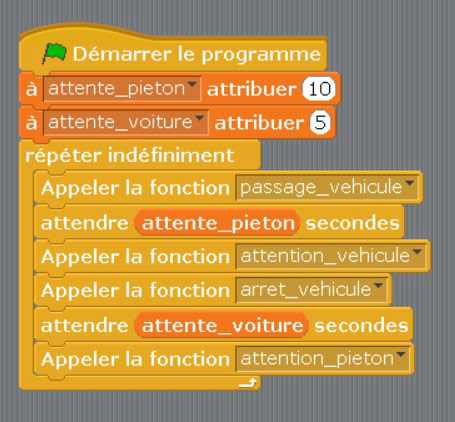
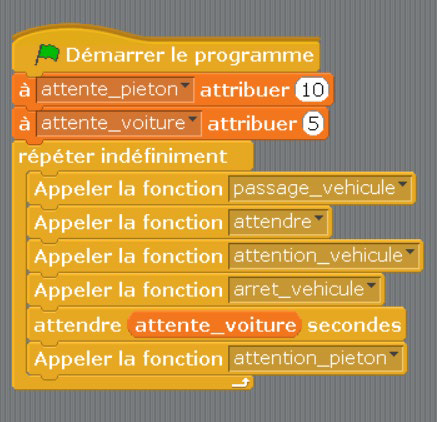
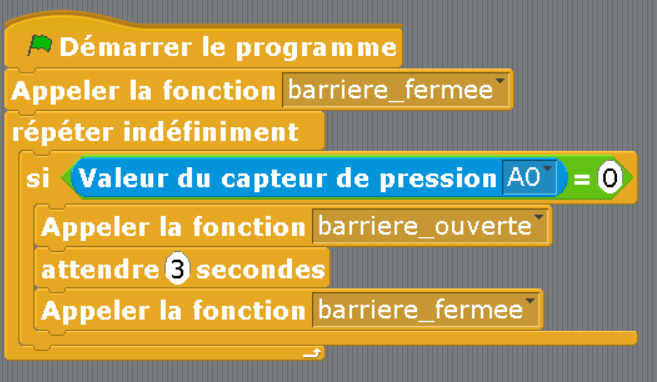
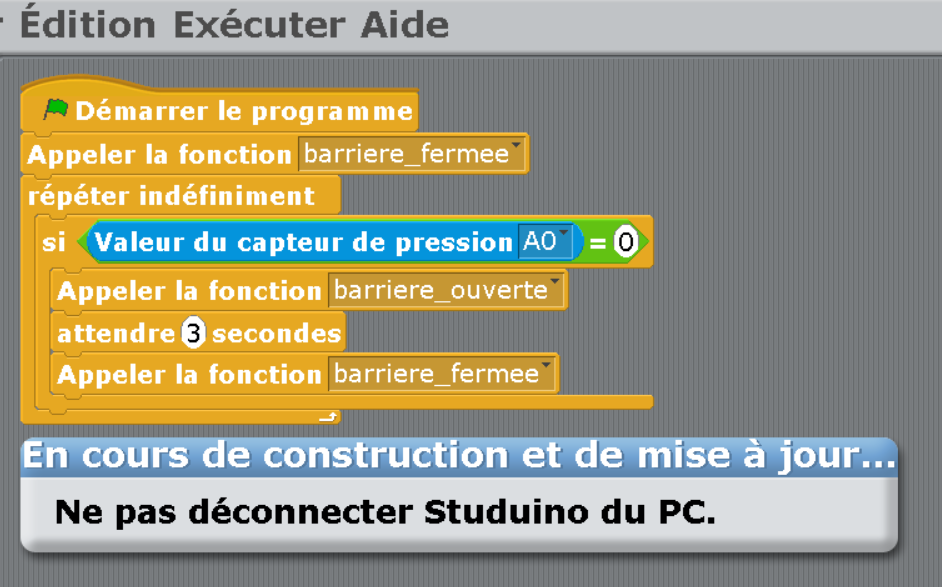
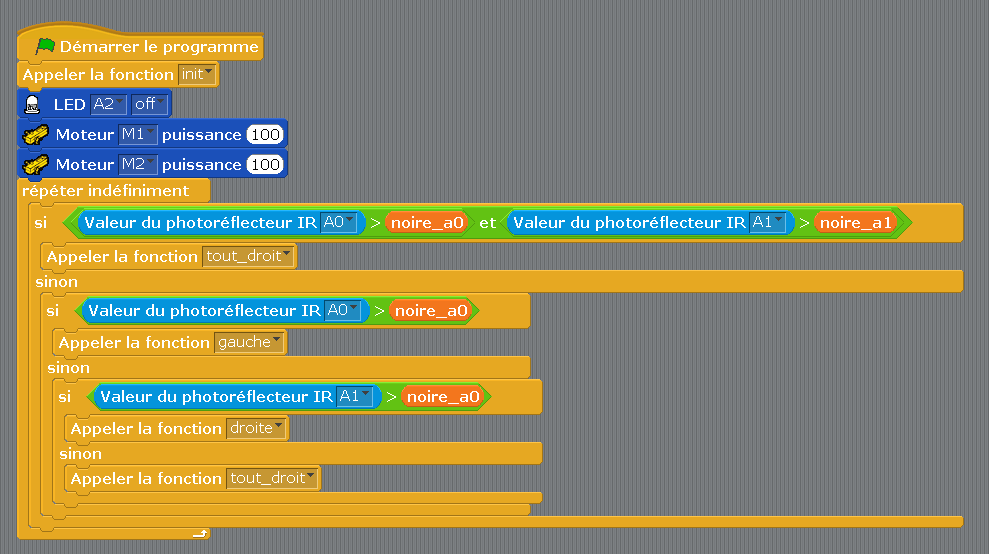
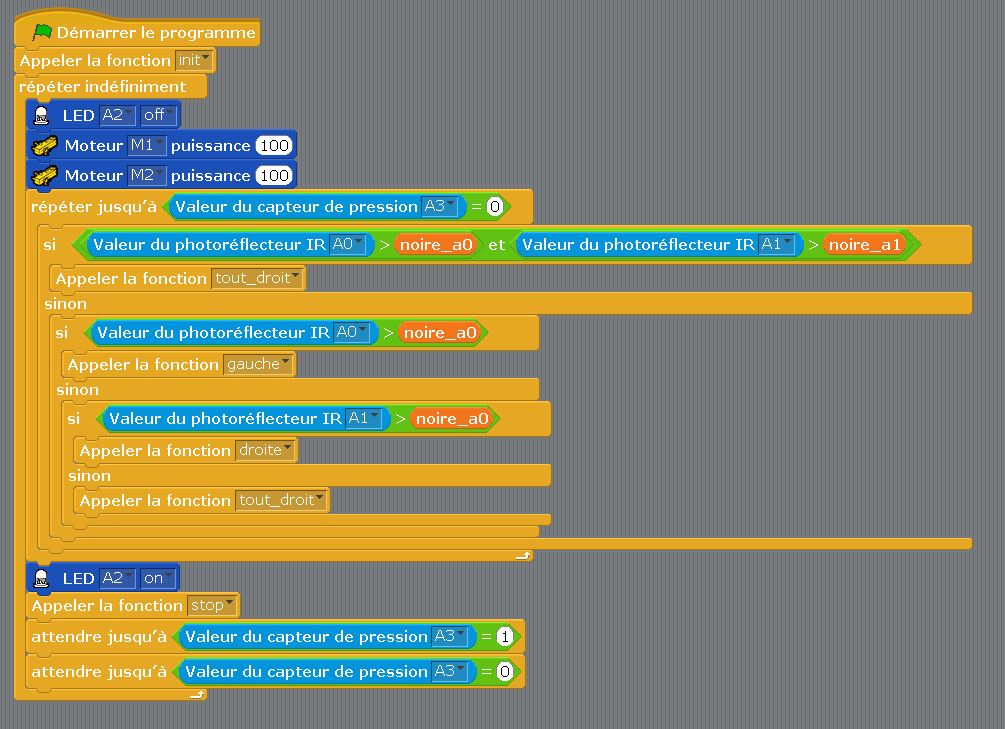
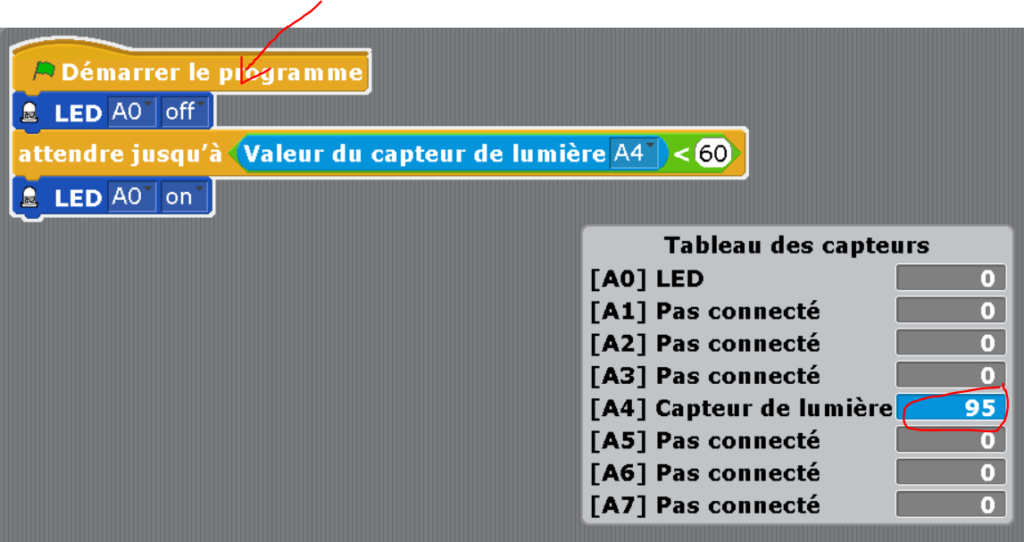
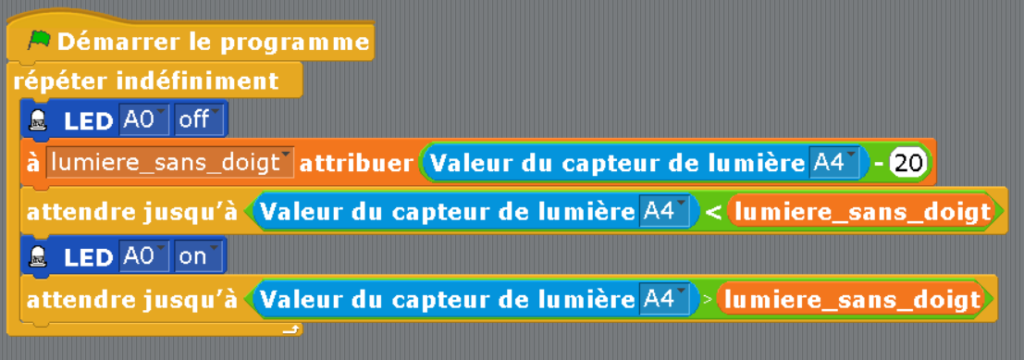
Agence ces instructions sous « démarrer le programme «
Clique sur « Exécuter » puis sur « Activer le test »
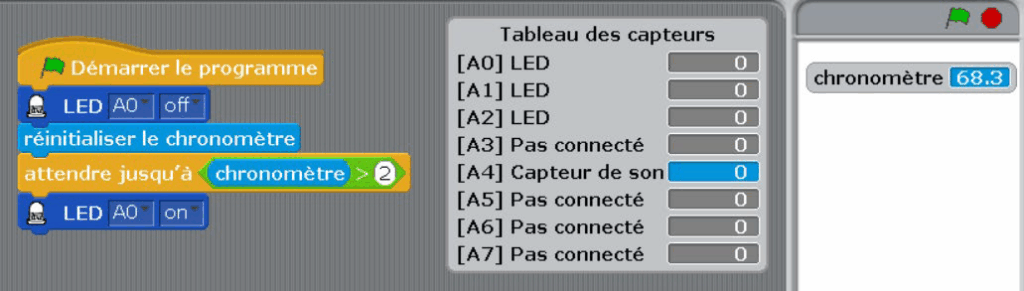
Clique sur le drapeau vert en haut à droite de l’écran pour lancer l’exécution de ton programme.
Un bord blanc apparaît pour indiquer que le programme s’exécute.
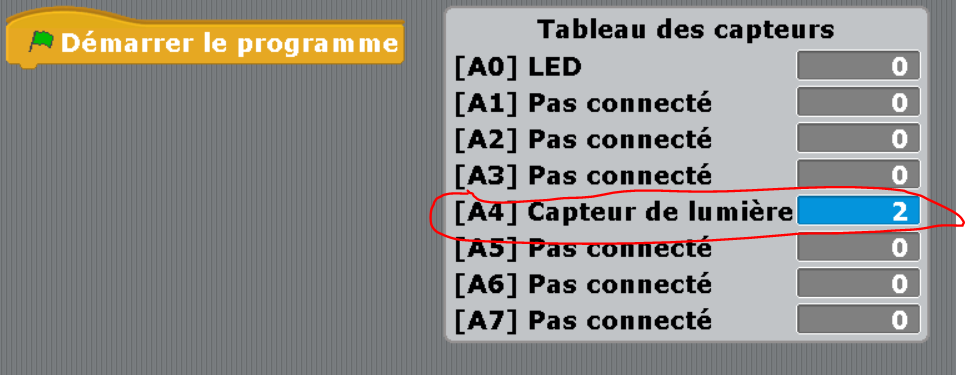
Que constates-tu ? Le chronomètre evolue-t-il ? La LED s’allume-t-elle ? Le bord blanc disparait-il ?
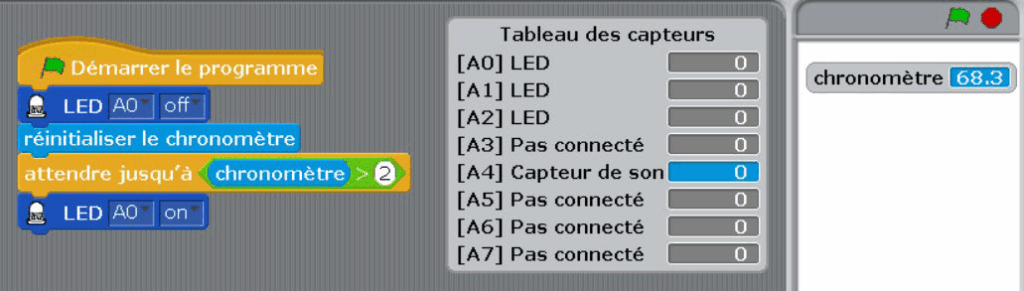
La LED s’allume et le bord blanc disparaît au bout de 2 secondes.
Etape 03 : Automatise tes animations
Ta mission :
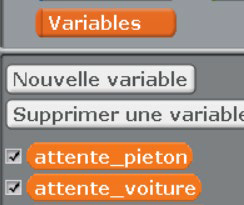
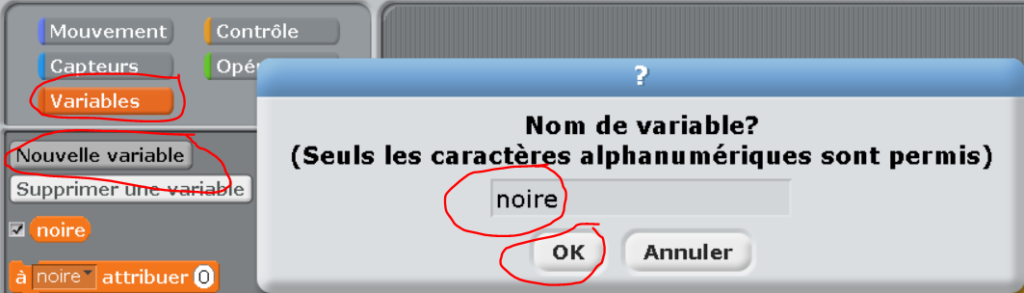
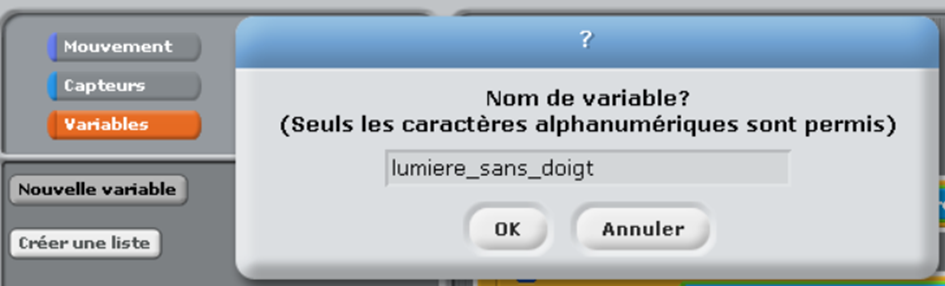
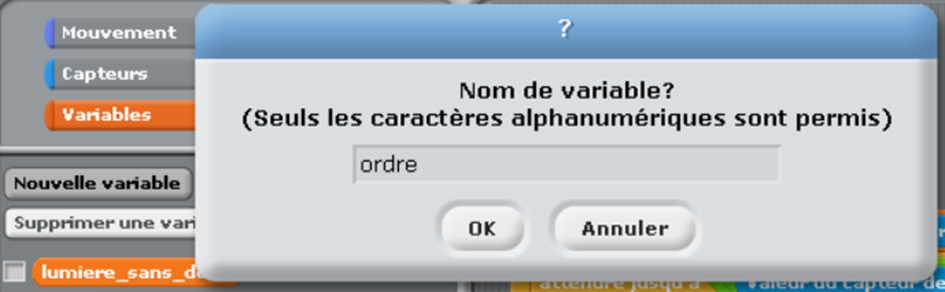
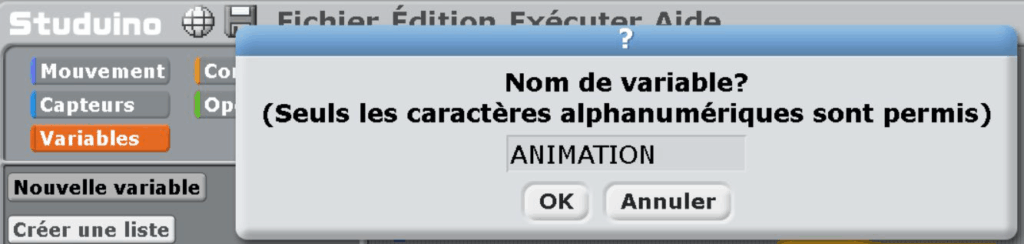
Fais clignoter ta LED toutes les secondes. Pour cela, crée une variable « ANIMATION ». Elle prendra les valeurs suivantes :
- 0 éteinte
- 1 allumée
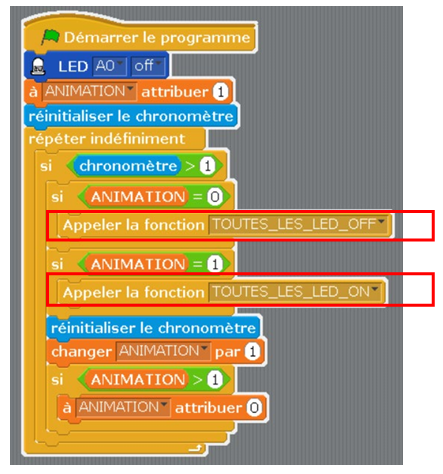
Toutes les secondes la variable ANIMATION passe de la valeur 0 à 1, la LED s’allume et s’éteint ainsi toutes les secondes.

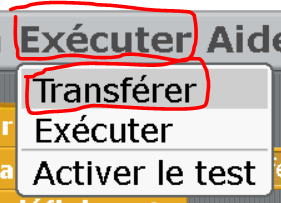
Clique sur le menu Exécuter en haut de l’écran puis choisis Transférer
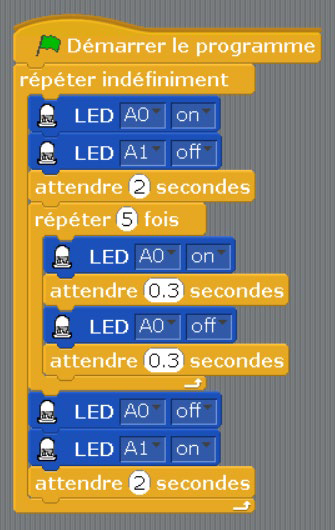
Utilise les animations que tu avais crées pour utiliser plusieurs LEDs :
Clique sur le menu Exécuter en haut de l’écran puis choisis Transférer
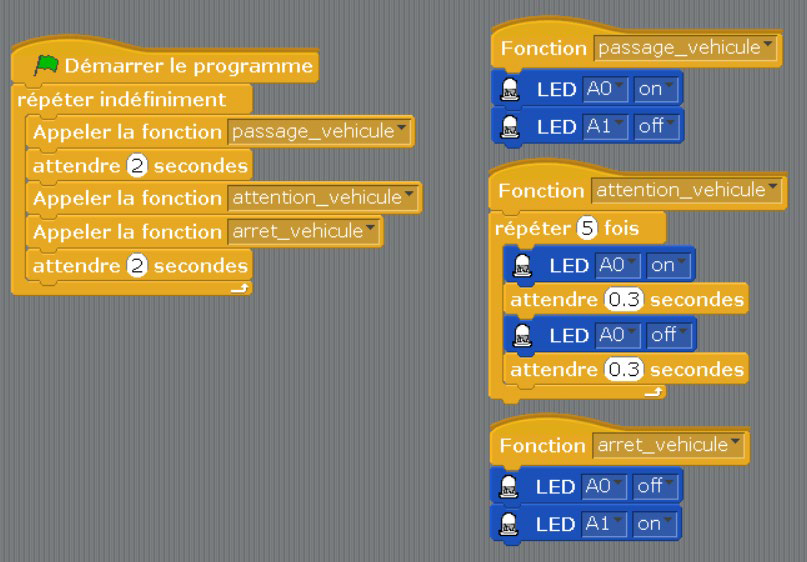
Tu peux améliorer ton code pour le rendre plus lisible :
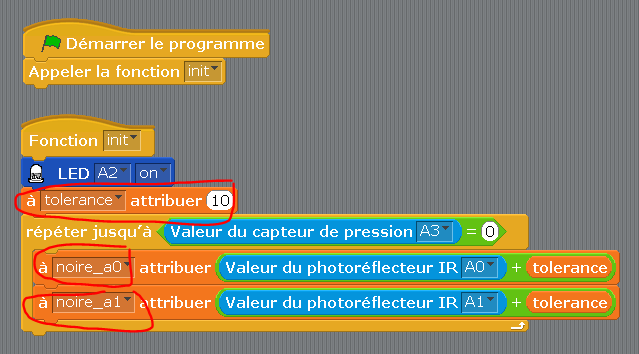
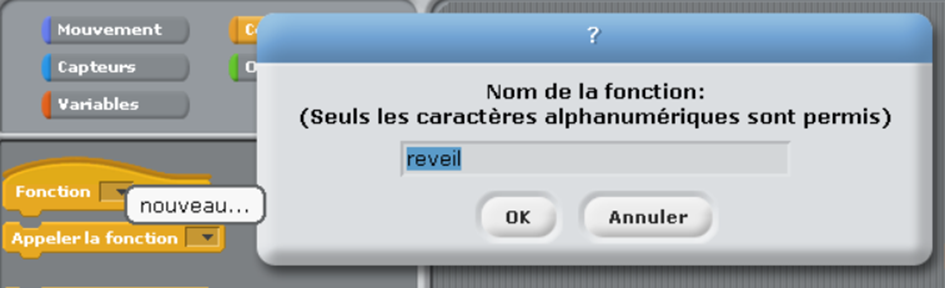
Crée une fonction INIT pour regrouper les instructions au lancement de ton programme :
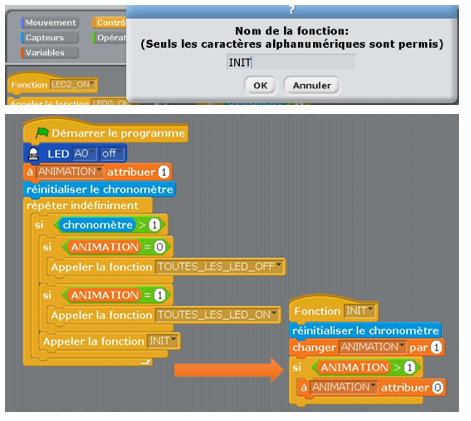
Ton code est ainsi plus facile à comprendre.
Clique sur le menu Exécuter en haut de l’écran puis choisis Transférer
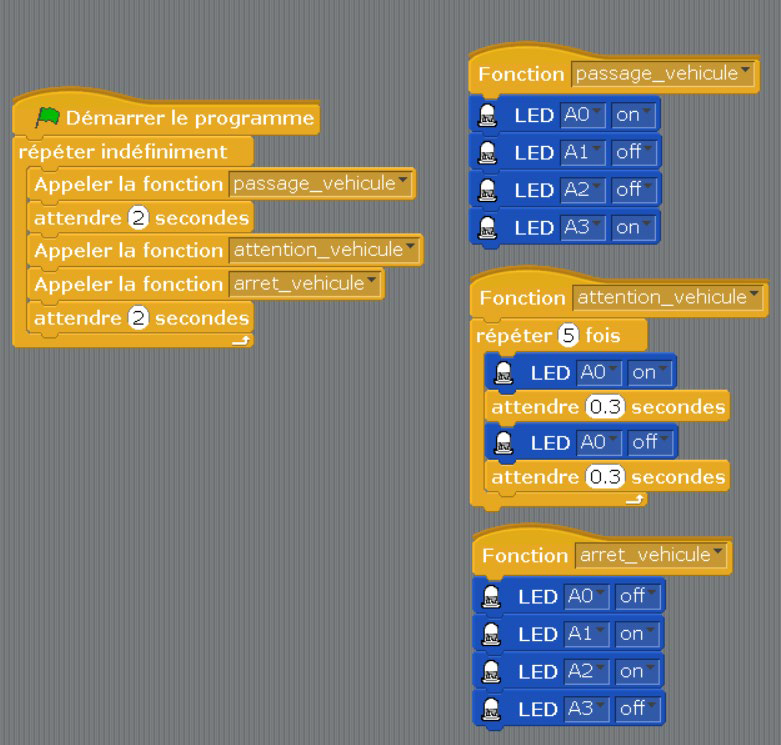
Etape 04 : Encore plus d’animations
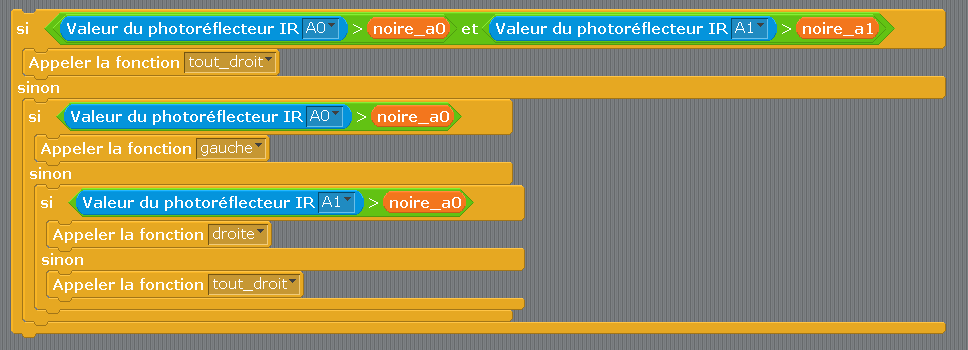
Continue à améliorer ton animation des LEDs. Allume les trois LEDs, puis la LED0, puis la LED1, puis la LED2.

Tu peux inventer autant d’animations que tu souhaites. A toi d’être imaginatif, tu peux faire varier la variable ANIMATION à plus de 4 animations. A toi de trouver les animations et de faire attention à modifier dans la fonction INIT le nombre maximum d’animation.
Code tes animations puis clique sur le menu Exécuter en haut de l’écran puis choisis Transférer
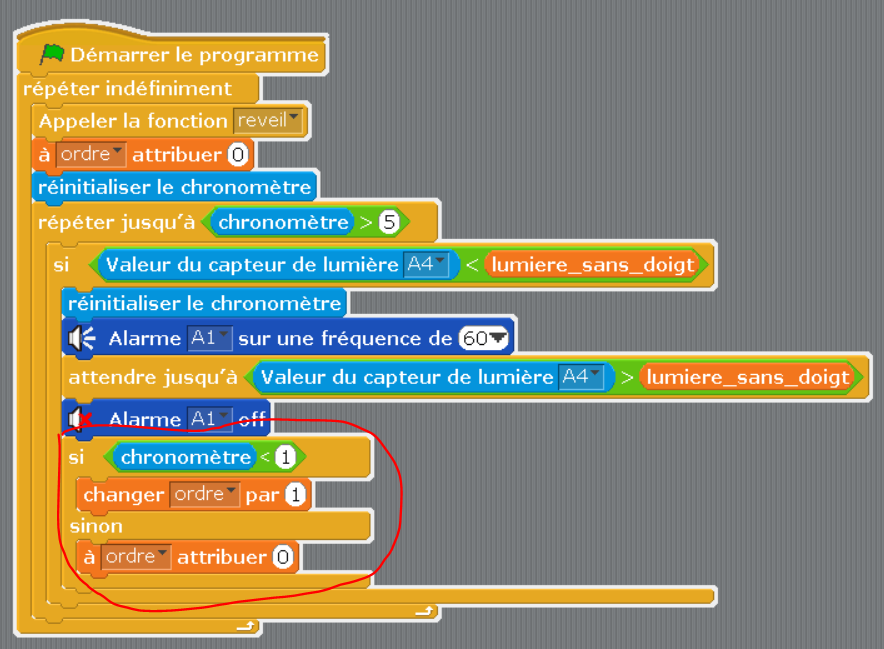
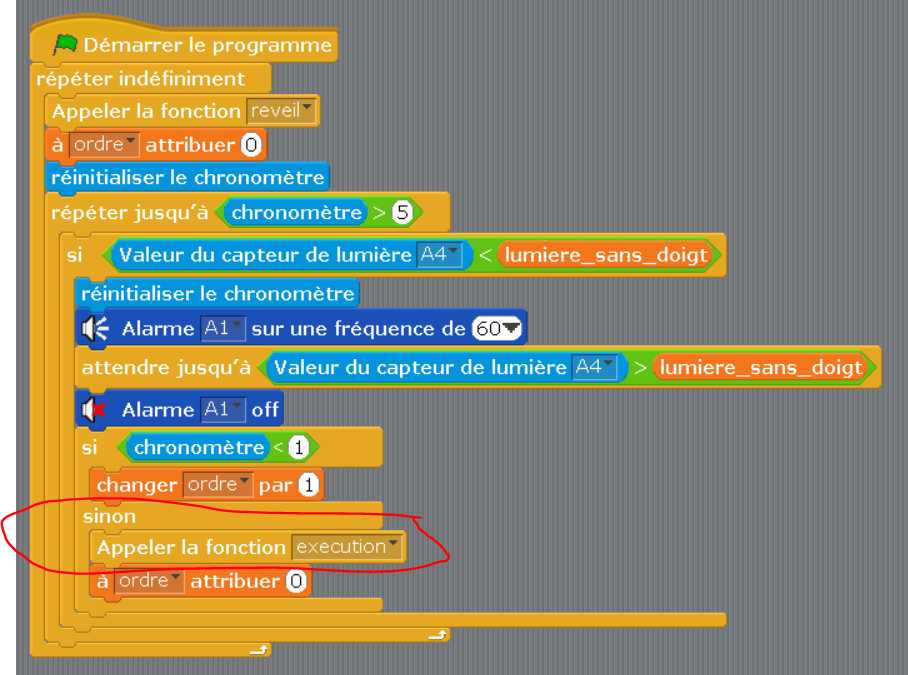
Etape 05 : Commande tes animations d’un clap de main
Code pour que ton spectacle se lance par un clap des mains puis s’arrête par un nouveau clap des mains.
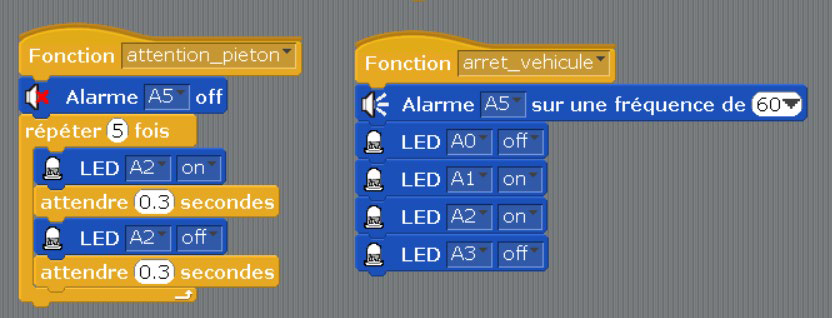
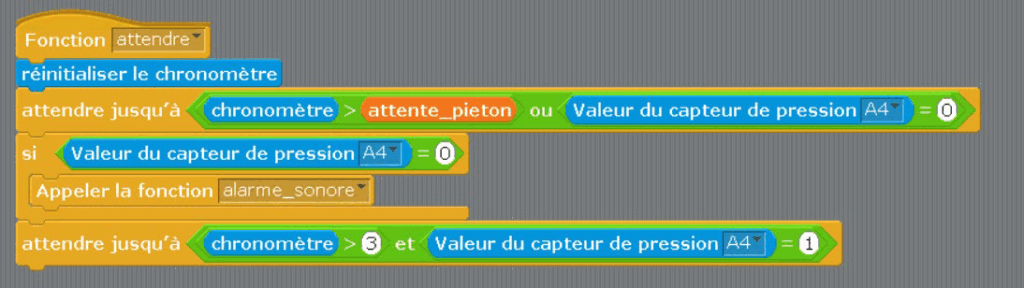
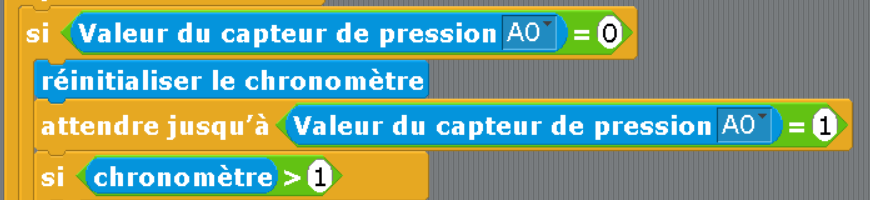
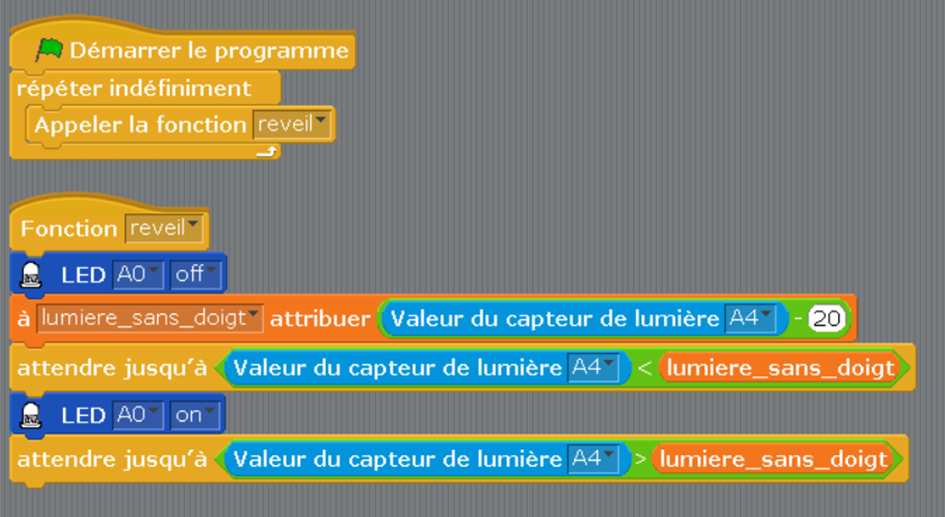
Le son de ton clap de main dure un certain temps. Les instructions suivantes te permettent de détecter un son puis de détecter quand le son se termine :

Il est important d’attendre que le son du claquement de mains soit terminé.
Sinon, ton programme risque de détecter un nouveau claquement alors que le premier n’est pas encore fini !
À chaque claquement de mains, ton robot allume ou éteint les LED.
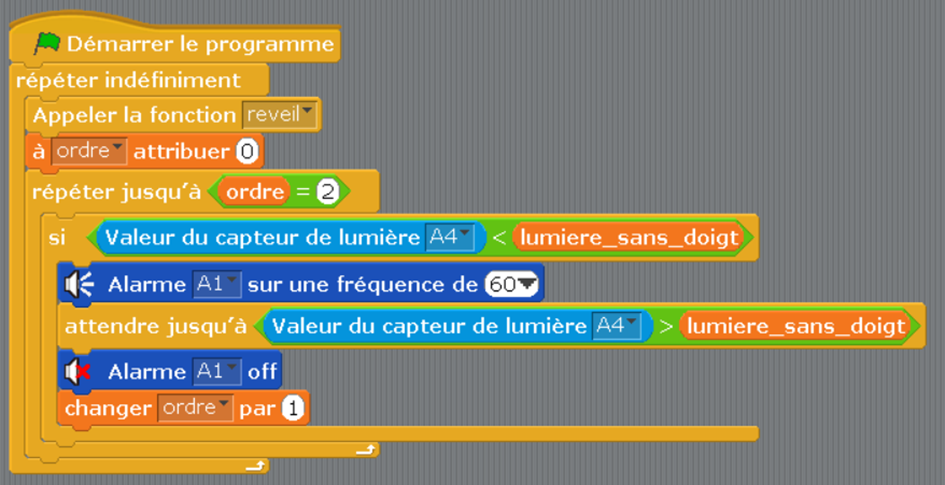
Maintenant programme pour que sur un clap des mains le spectacle de lumière se lance puis tu peux l’arrêter par un nouveau clap des mains.
Ton spectacle doit être magnifique, faire clignoter toutes les LEDs en même temps, les faire clignoter successivement …
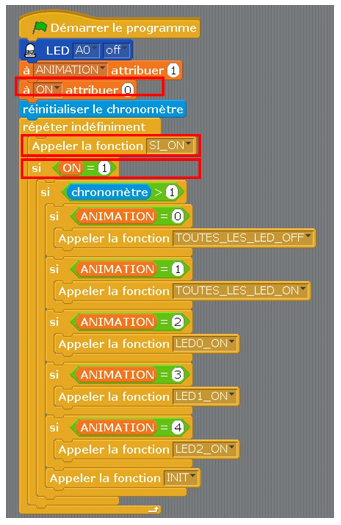
Crée une variable « ON » qui va mémoriser l’état de ton animation :
- 1 en fonctionnement
- 0 éteinte

Puis une fonction qui teste le microphone pour allumer ou éteindre
l’animation :


Insère ta fonction « SI_ON » dans le code principal et conditionne le lancement de ton animation en fonction de la variable « ON ».
Clique sur le menu Exécuter en haut de l’écran puis choisis Transférer