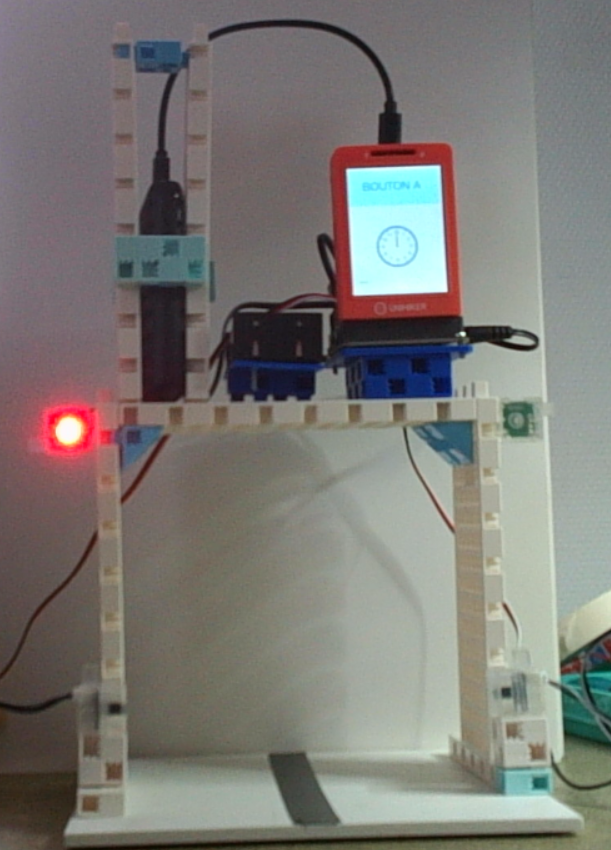
Créer un portique de chronométrage pour mesurer le temps mis par un robot suiveur de ligne pour parcourir un circuit. Le portique détecte le passage du robot grâce à des capteurs infrarouges et affiche le temps sur l’écran du microcontrôleur UNIHIKER.
Le robot passe une première fois sous le portique au départ, puis une deuxième fois à l’arrivée.
Premier passage : démarrage du chronomètre.
Deuxième passage : arrêt du chronomètre.
Les composants du portique
Élément
Rôle
Description
🧠 Microcontrôleur UNIHIKER
Le cerveau du portique
Il gère les capteurs, mesure le temps et affiche les résultats sur son écran.
👀 Deux capteurs photoréflecteurs IR
Détecter le robot
Placés en vis-à-vis de chaque côté du portique, ils détectent quand le robot passe (interruption du faisceau).
💡 LED verte
Indiquer que le portique est prêt
Allumée : le portique attend le départ du robot.
🔴 LED rouge
Indiquer la mesure en cours
Allumée : le portique mesure le temps du parcours.
📺 Écran intégré à l’UNIHIKER
Affichage du résultat
Montre le message “Prêt”, “Course en cours…” et le temps mesuré.
Le portique attend le robot (LED verte). Le robot passe une première fois → démarrage du chrono. Le robot passe une deuxième fois → arrêt du chrono et affichage.
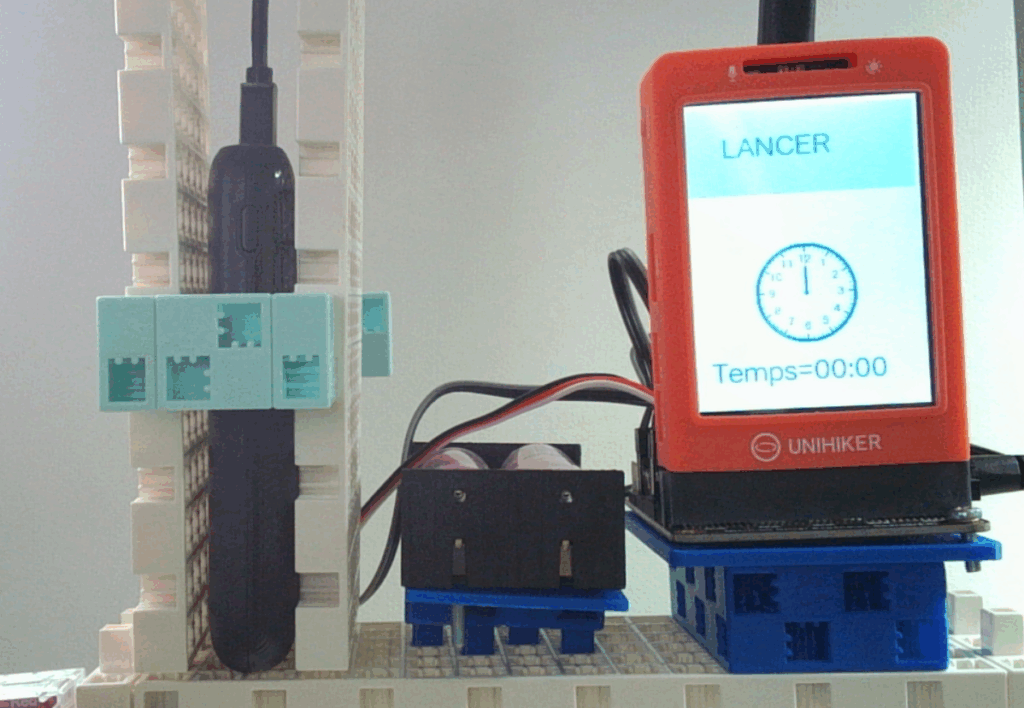
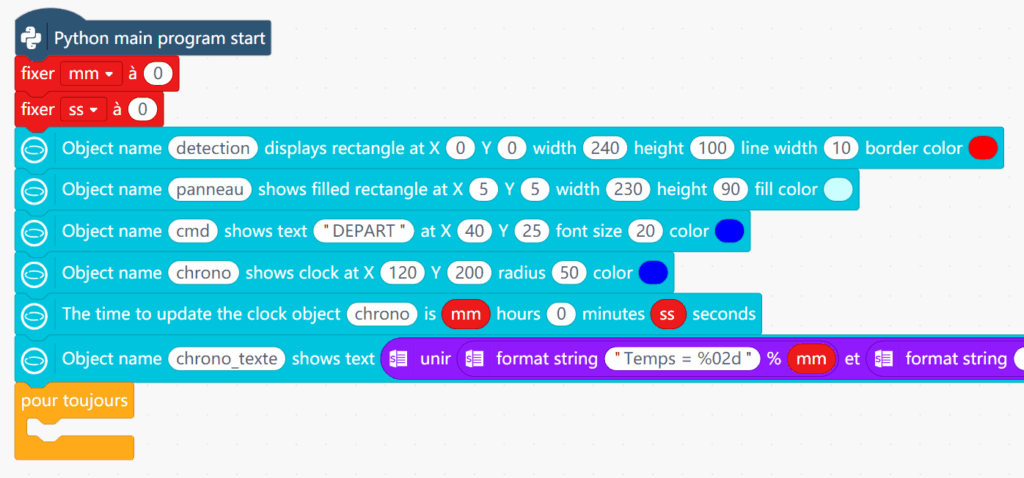
Programmation de l’interface
Détail des instructions pour l’affichage du temps :
Lance pour vérifier l’affichage
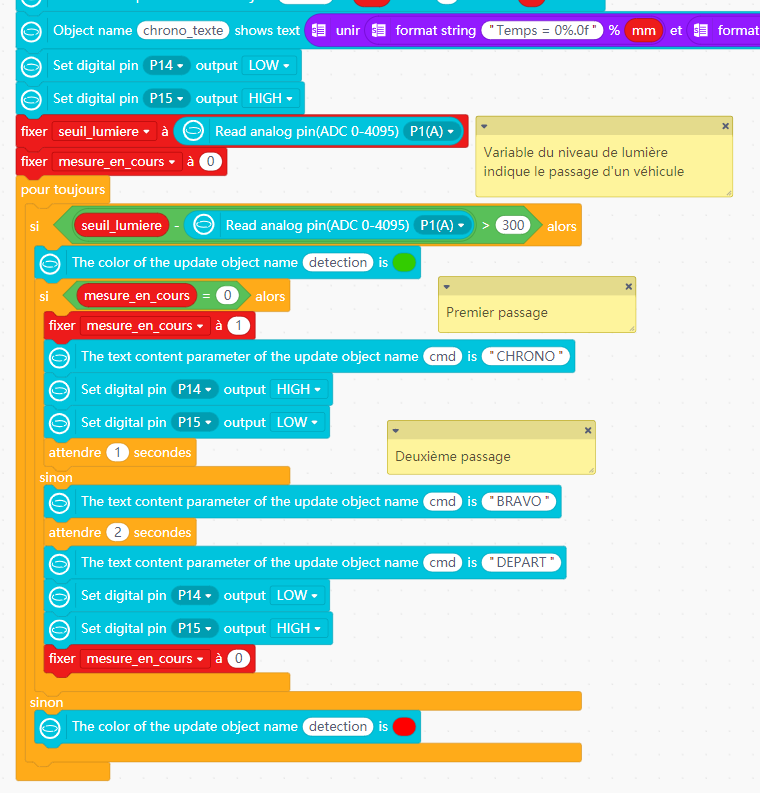
Programmation de la détection des passages
⚙️ Principe de détection du robot par le portique
🔦 1. Comment le portique détecte le passage du robot
Le portique utilise un photoréflecteur infrarouge. C’est un petit capteur qui envoie de la lumière invisible (infrarouge) et mesure la lumière qu’il reçoit en retour.
Quand rien ne passe, la lumière rebondit normalement : 👉 le capteur reçoit beaucoup de lumière.
Quand le robot passe devant, il bloque ou réfléchit moins la lumière : 👉 le capteur reçoit moins de lumière.
C’est ce changement de niveau de lumière que le portique utilise pour savoir qu’un robot vient de passer.
🧠 2. La variable mesure_en_cours
Pour que le portique sache s’il doit démarrer ou arrêter le chronomètre, on utilise une variable mémoire qu’on appelle ici :
Cette variable peut prendre deux valeurs :
Valeur
Signification
État du portique
0
Attente du robot au départ
Portique prêt, LED verte allumée
1
Chronométrage en cours
LED rouge allumée, le portique mesure le temps
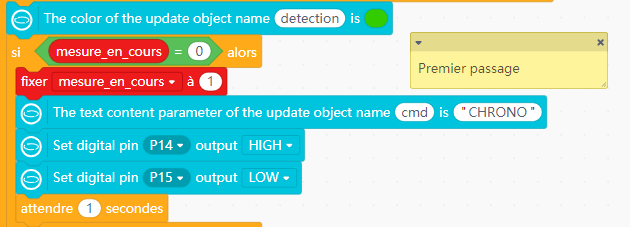
⏱️ 3. Les deux passages du robot
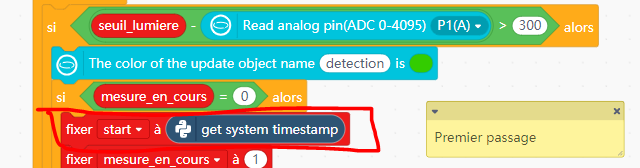
🟢 Premier passage : le départ
Le portique attend (mesure_en_cours = 0).
Le robot passe → le capteur détecte un changement de lumière.
Le portique :
allume la LED rouge,
met mesure_en_cours = 1,
attente que le véhicule passe.
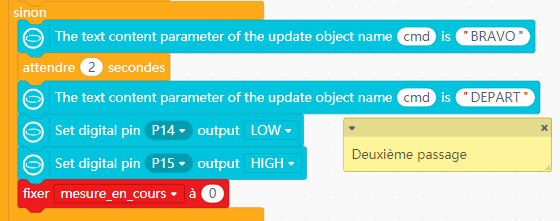
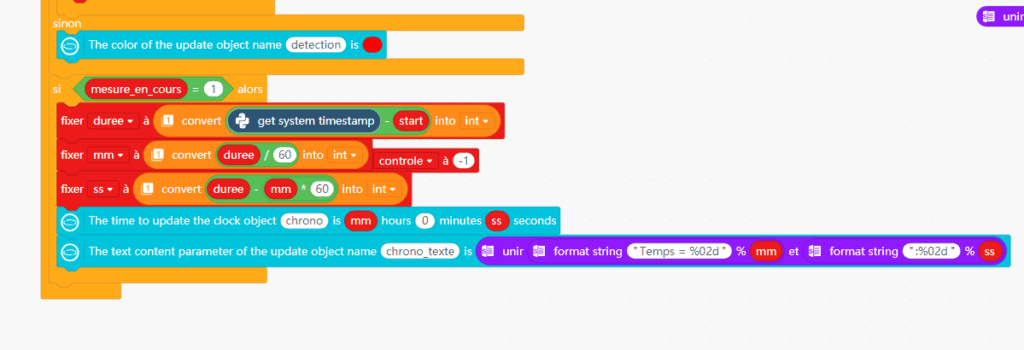
🔴 Deuxième passage : l’arrivée
Le robot repasse sous le portique.
Le capteur détecte à nouveau un changement de lumière.
Le portique :
rallume la LED verte,
remet mesure_en_cours = 0 (prêt pour une nouvelle mesure),
attente que le véhicule passe.
Le programme avec la détection et le comptage des passages :
Lance pour vérifier
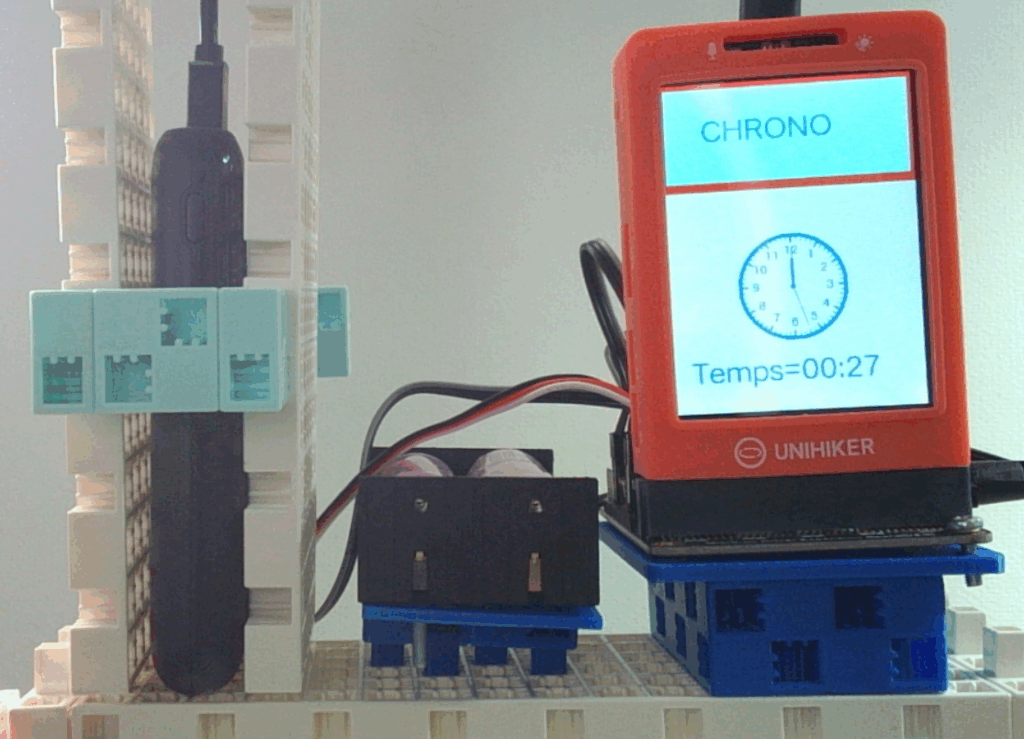
Programmation du chronomètre
🟢 Premier passage : le départ
démarre le chronomètre,
⏱️ Affichage du temps
affiche le temps sur l’écran,
Lance pour vérifier
Programmation en python
Bibliothèques conseillées
import time import math from unihiker import GUI from pinpong.board import Board,Pin from pinpong.extension.unihiker import *
Objets à instancier # Interfaces u_gui=GUI() # Micro contrôleur Board().begin()
# Photo réflecteur IR sur le port P1 p_p1_analog=Pin(Pin.P1, Pin.ANALOG)
# LED rouge p_p14_out=Pin(Pin.P14, Pin.OUT)
# LED verte p_p15_out=Pin(Pin.P15, Pin.OUT)
# Lecture du photo réflecteur IR lumiere = p_p1_analog.read_analog()
# Gestion des LEDs p_p14_out.write_digital(0) p_p15_out.write_digital(1)
# Affichage du chronomètre mm = 0 ss = 0 chrono=u_gui.draw_clock( h=mm,m=0,s=ss, x=120,y=200,r=50, color= »#0000FF ») text_chrono = u_gui.draw_text( text= »Temps= »+ str(mm).zfill(2)+ »: »+str(ss).zfill(2), x=20,y=260, font_size=20, color= »#0000FF »)
# Affichage d’un texte u_gui.draw_text( text= »texte à afficher », x=40,y=25, font_size=20, color= »#0000FF »)
# Dessin d’une surface rectangle u_gui.fill_rect(x=5,y=5,w=230,h=90,color= »#CCFFFF »)
# Dessin d’un pourtour d’un rectangle u_gui.draw_rect(x=0,y=0,w=240,h=100,width=10,color= »#FF0000″)
# Gestion du temps (pour le chrono) # Récupération du temps start = time.time() # Calcul d’une durée en minutes et secondes duree = int(time.time() – start) mm = int(duree / 60) ss = int(duree – (mm * 60))
# Exemple pour l’affichage du temps chrono.config(h=mm,m=0,s=ss) text_chrono.config(text= »Temps= »+str(mm).zfill(2)+ »: »+str(ss).zfill(2))
from unihiker import GUI
import time
gui = GUI()
# Dessin d'un cercle pour le visage
circle = gui.draw_circle(x = 120,y = 140,r = 50,width = 3,color = "#FF6666")
# Création de l'emoji
emj = gui.draw_emoji(emoji = "Wink", origin = "center", x=120, y=120, duration = 0.2, w=50)
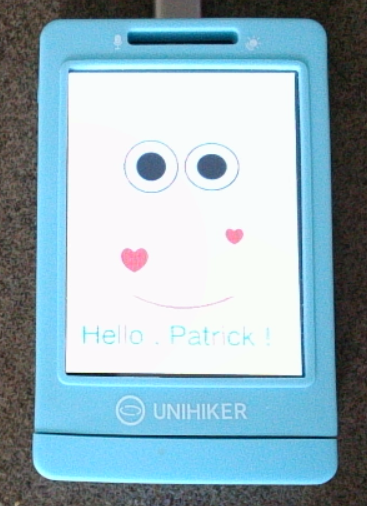
# Affichage du prénom en bas de l'écran
Text = gui.draw_text(text='Hello , Patrick !',x=15,y=260,font_size=20)
Text.config(color='#0000FF')
width = 50
radius = 30
delta_radius = 2.5
delta_width = 5
while True:
# Animation de l'emoji
time.sleep(0.3)
width += delta_width
radius += delta_radius
circle.config(r=radius)
emj.config(w = width)
if not (50 <= width <= 240):
delta_width = -delta_width
delta_radius = -delta_radius
Si tu veux une progression plus douce (effet oscillation) Tu peux remplacer l’incrémentation linéaire par une fonction sinus :
from unihiker import GUI
import time, math
gui = GUI()
# Dessin d'un cercle pour le visage
circle = gui.draw_circle(x = 120,y = 140,r = 50,width = 3,color = "#FF6666")
# Création de l'emoji
emj = gui.draw_emoji(emoji = "Wink", origin = "center", x=120, y=120, duration = 0.2, w=50)
# Affichage du prénom en bas de l'écran
Text = gui.draw_text(text='Hello , Patrick !',x=15,y=260,font_size=20)
Text.config(color='#0000FF')
width = 50
radius = 30
delta_radius = 2.5
delta_width = 5
t = 0
while True:
time.sleep(0.03)
radius = 80 + 40 * math.sin(t)
width = 120 + 60 * math.sin(t)
circle.config(r=int(radius))
emj.config(w=int(width))
t += 0.1
Les différentes possibilité des emoji.
Angry,
Nerve,
Peace,
Shock,
Sleep,
Smile,
Sweat,
Think,
Wink
Changement des EMOJI avec les boutons A ou B
from unihiker import GUI
from pinpong.extension.unihiker import *
import time, math
gui = GUI()
# Dessin d'un cercle pour le visage
circle = gui.draw_circle(x = 120,y = 140,r = 50,width = 3,color = "#FF6666")
emoji_table = ["Angry", "Nerve", "Peace", "Shock", "Sleep", "Smile", "Sweat", "Think", "Wink"]index = 0
# Création de l'emoji
emj = gui.draw_emoji(emoji = emoji_table[index], origin = "center", x=120, y=120, duration = 0.2, w=50)
# Affichage du prénom en bas de l'écran
Text = gui.draw_text(text='Hello , Patrick !',x=15,y=260,font_size=20)
Text.config(color='#0000FF')
width = 50
radius = 30
delta_radius = 2.5
delta_width = 5
import time, math
t = 0
while True:
time.sleep(0.03)
radius = 80 + 40 * math.sin(t)
width = 120 + 60 * math.sin(t)
circle.config(r=int(radius))
emj.config(w=int(width))
t += 0.1
# Changement de l'emoji avec le bouton A ou B
if (button_a.is_pressed()==True):
index = index + 1 if index < 8 else 0
emj.config(emoji = emoji_table[index])
if (button_b.is_pressed()==True):
index = index - 1 if index > 0 else 8
emj.config(emoji = emoji_table[index])
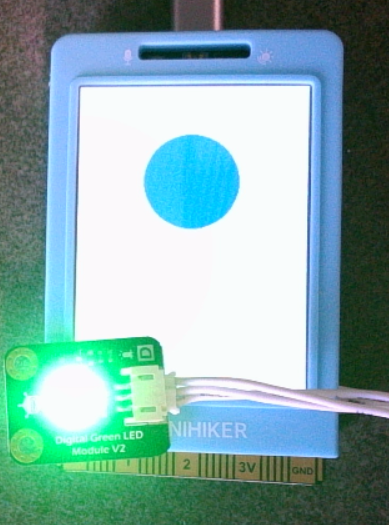
Bouton A ou B lumineux
Les boutons A et B de l’UNIHIKER sont accessibles à l’utilisateur, ce qui permet de créer un projet impliquant une LED contrôlée par des boutons. Ce projet vérifie d’abord si les boutons A et B de l’UNIHIKER ont été enfoncés, puis contrôle l’allumage et l’extinction de la LED bleue située à l’arrière de l’UNIHIKER. La bibliothèque PinPong propose deux façons d’utiliser les boutons : la première consiste à lire directement la requête, la seconde à utiliser les rappels d’événements d’interruption. Voici un exemple de contrôle de l’allumage et de l’extinction de la LED à l’aide des boutons A et B.
Utilise ces librairies :
from pinpong.extension.unihiker import *
from pinpong.board import Board,Pin
from unihiker import GUI
from pinpong.extension.unihiker import *
from pinpong.board import Board,Pin
from unihiker import GUI
# Initialisation de l'interface et de la carte
gui=GUI()
Board().begin()
# Initialisation de la LED
ledUI = gui.fill_circle(x=120,y=100,r=50,color="#FFFF00")
led = Pin(Pin.P25, Pin.OUT)
while True:
# Bouton A appuyé
if (button_a.is_pressed()==True):
led.write_digital(1)
ledUI.config(color="#0000FF")
# Bouton B appuyé
if (button_b.is_pressed()==True):
led.write_digital(0)
ledUI.config(color="#FF0000")
Fonctions d’interception de l’événement de l’appui sur le bouton A ou B
from pinpong.extension.unihiker import *
from pinpong.board import Board,Pin
from unihiker import GUI
# Controle de l'appui du bouton A
def on_buttona_click_callback():
led.write_digital(1)
ledUI.config(color="#0000FF")
# Controle de l'appui du bouton B
def on_buttonb_click_callback():
led.write_digital(0)
ledUI.config(color="#FF0000")
# Initialisation de l'interface et de la carte
gui=GUI()
Board().begin()
ledUI = gui.fill_circle(x=120,y=100,r=50,color="#FFFF00")
# Eteindre la LED
led = Pin(Pin.P25, Pin.OUT)
# Intercpetion des boutons A et B
gui.on_a_click(on_buttona_click_callback)
gui.on_b_click(on_buttonb_click_callback)
while True:
pass
LED externe sur le port 22
led = Pin(Pin.P22, Pin.OUT)
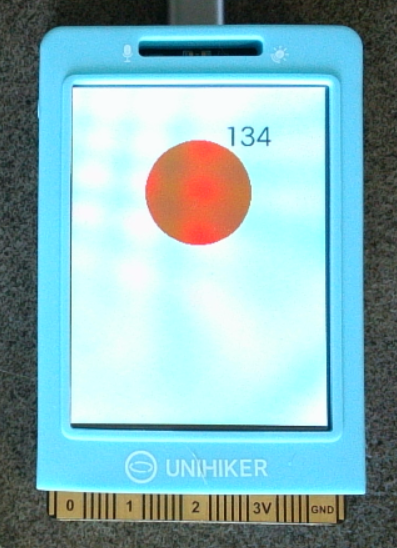
Détecteur de luminosité
UNIHIKER est équipé d’un capteur de lumière placé au-dessus de l’écran frontal, permettant de détecter l’intensité lumineuse ambiante. Grâce à cette fonctionnalité, un détecteur de luminosité peut être développé. Ce projet consiste à afficher la valeur lumineuse détectée par le capteur sur l’écran.
from unihiker import GUI
import time
from pinpong.board import Board
from pinpong.extension.unihiker import *
# # initialization
Board().begin()
# Instantiate a GUI object
gui = GUI()
img = gui.fill_circle(x=120,y=100,r=50,color="#FFFF00")
value = gui.draw_text(x=145, y=28, text='0', font_size=18)
while True :
# Update the displayed light value
Light = light.read()
value.config(text = Light)
# Light value level
if Light < 600:
img.config(color="#FF6600")
elif 600 <= Light < 1024:
img.config(color="#FF9900")
elif 1024 <= Light < 2048:
img.config(color="#FFCC33")
elif 2048 <= Light < 3072:
img.config(color="#FFFF99")
else:
img.config(color="#FFFF00")
time.sleep(1)
Dans cet exemple, UNIHIKER est initialisé avec Board().begin(). Ensuite, un objet GUI est instancié et un objet image et un objet texte sont créés à l’aide des méthodes draw_image() et draw_text(), respectivement. Dans la boucle principale, l’intensité lumineuse ambiante est obtenue grâce à la méthode light.read() de la bibliothèque PinPong, et la valeur lumineuse est affichée à l’écran grâce à la méthode draw_text() de la bibliothèque GUI.
L’intensité lumineuse ambiante est divisée en cinq niveaux en moyenne, et différents niveaux de luminosité sont représentés par des cercles de couleurs différentes, selon les conditions d’éclairage.
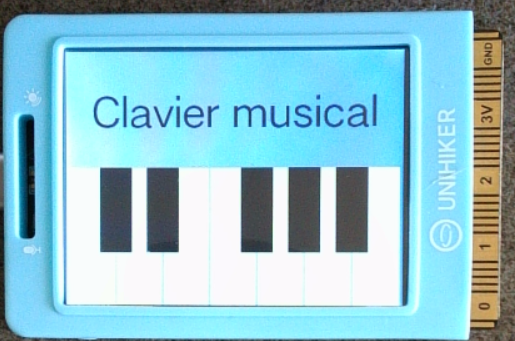
Piano musical
L’UNIHIKER est équipé d’un buzzer capable d’émettre différentes tonalités en réglant différentes fréquences. Cette fonctionnalité permet de créer un piano électronique. Ce projet propose une interface utilisateur simple permettant aux utilisateurs de jouer différentes notes en appuyant sur des boutons à l’écran. Voici un exemple de piano électronique :
from pinpong.extension.unihiker import *
from pinpong.board import Board,Pin
from unihiker import GUI
import time
# Gestion des touches du piano
def button_click1():
buzzer.pitch(262,1)
text.config(text="C4")
def button_click2():
buzzer.pitch(294,1)
text.config(text="D4")
def button_click3():
buzzer.pitch(330,1)
text.config(text="E4")
def button_click4():
buzzer.pitch(349,1)
text.config(text="F4")
def button_click5():
buzzer.pitch(392,1)
text.config(text="G4")
def button_click6():
buzzer.pitch(440,1)
text.config(text="A4")
def button_click7():
buzzer.pitch(494,1)
text.config(text="B4")
def button_click8():
buzzer.pitch(277,1)
text.config(text="C#4")
def button_click9():
buzzer.pitch(311,1)
text.config(text="D#4")
def button_click10():
buzzer.pitch(370,1)
text.config(text="F#4")
def button_click11():
buzzer.pitch(415,1)
text.config(text="G#4")
def button_click12():
buzzer.pitch(466,1)
text.config(text="A#4")
# Initialisation de l'interface et de la carte
u_gui=GUI()
Board().begin()
# Affichage du titre
bg=u_gui.fill_rect(x=0,y=0,w=240,h=320,color="#CCCCFF")
text = u_gui.draw_text(x=185,y=160,text="Clavier musical",origin="center",font_size=28,angle=270)
# Zones sensibles du clavier musical (touches blanches)
do=u_gui.fill_rect(x=0,y=3,w=130,h=43,color="#FFFFFF",onclick=button_click1)
re=u_gui.fill_rect(x=0,y=48,w=130,h=43,color="#FFFFFF",onclick=button_click2)
mi=u_gui.fill_rect(x=0,y=93,w=130,h=43,color="#FFFFFF",onclick=button_click3)
fa=u_gui.fill_rect(x=0,y=138,w=130,h=43,color="#FFFFFF",onclick=button_click4)
so=u_gui.fill_rect(x=0,y=183,w=130,h=43,color="#FFFFFF",onclick=button_click5)
la=u_gui.fill_rect(x=0,y=228,w=130,h=43,color="#FFFFFF",onclick=button_click6)
xi=u_gui.fill_rect(x=0,y=273,w=130,h=43,color="#FFFFFF",onclick=button_click7)
# Zones sensibles du clavier musical (touches noires)
bian1=u_gui.fill_rect(x=50,y=32,w=80,h=30,color="#000000",onclick=button_click8)
bian2=u_gui.fill_rect(x=50,y=77,w=80,h=30,color="#000000",onclick=button_click9)
bian3=u_gui.fill_rect(x=50,y=167,w=80,h=30,color="#000000",onclick=button_click10)
bian4=u_gui.fill_rect(x=50,y=212,w=80,h=30,color="#000000",onclick=button_click11)
bian5=u_gui.fill_rect(x=50,y=257,w=80,h=30,color="#000000",onclick=button_click12)
while True:
time.sleep(0.1)
Dans cet exemple, UNIHIKER est initialisé avec Board().begin().
Ensuite, un objet GUI est instancié, sur un fond bleu plusieurs rectangles noirs et blancs (représentant différentes touches de piano) sont créés à l’aide de la fonction fill_rect().
Ensuite, une série de fonctions d’événements sur le click de chaque touche sont définies, chacune correspondant à une note de musique.
Dans les fonctions appelées par un click sur la touche, le buzzer est contrôlé pour émettre un son d’une fréquence et d’une durée spécifiques à l’aide de la fonction buzzer.pitch (frequency, duration).
Chaque note de musique est liée à une touche de piano, et lorsque la touche est enfoncée, la fonction de rappel correspondante est exécutée et le buzzer joue la note correspondante.
De plus, une zone de texte affiche le nom de la note jouée, permettant ainsi à l’utilisateur d’identifier la note jouée.
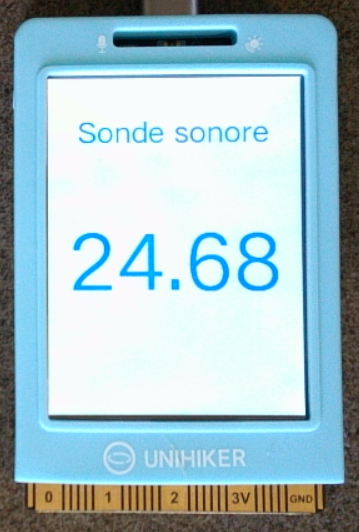
Sonde sonore
L’UNIHIKER est également équipé d’un microphone capable de capter l’intensité du bruit ambiant. Cette fonctionnalité permet de créer un dispositif de surveillance du bruit, affichant l’intensité du bruit ambiant à l’écran. De plus, un seuil de bruit peut être défini ; lorsqu’il est dépassé, un signal sonore retentit pour vous avertir. Voici un exemple de dispositif de surveillance du bruit :
from pinpong.extension.unihiker import *
from pinpong.board import Board,Pin
from unihiker import Audio
from unihiker import GUI
Board().begin()
# Instantiation des objets audio et interface
audio = Audio()
gui = GUI()
# Titre du dispositif
gui.draw_text(text="Sonde sonore",x=120,y=50,font_size=20, color="#0000FF", origin="center")
# Affichage du niveau sonore
sound_text = gui.draw_text(text="",x=120,y=170,font_size=55, color="#0000FF", origin="center")
while True:
# Récupération du niveau sonore et son affichage
sound_value = audio.sound_level()
sound_text.config(text=sound_value, color="#0000FF")
# Déctection du niveau sonore
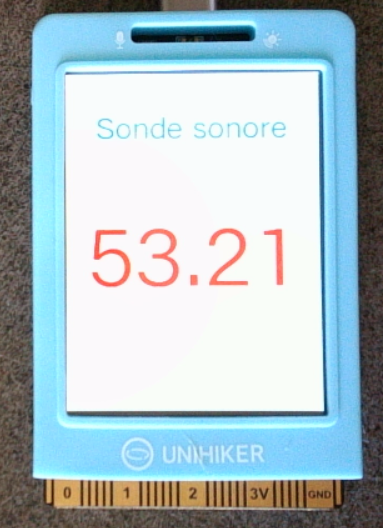
if (sound_value > 50):
# Alerte visuelle et sonore
sound_text.config(color="#FF0000")
buzzer.pitch(392)
time.sleep(0.1)
buzzer.stop()
# On laisse le niveau sonore retomber avant de le mesurer à nouveau
time.sleep(1)
Dans cet exemple, l’UNIHIKER est initialisé avec la fonction Board().begin().
Ensuite, un objet Audio et un objet GUI sont instanciés, et deux objets texte sont créés avec la fonction draw_text(). Ces objets texte affichent respectivement la surveillance du bruit et les valeurs de bruit correspondantes.
Dans la boucle principale, la méthode sound_level() de l’objet Audio permet d’obtenir l’intensité sonore ambiante, puis la méthode config() de l’objet texte permet de mettre à jour la valeur de luminosité à l’écran. Parallèlement, l’intensité sonore est vérifiée pour vérifier si elle dépasse le seuil défini. Si tel est le cas, la fonction buzzer.pitch(frequency) émet une alarme sonore, puis la fonction buzzer.stop() désactive le buzzer.
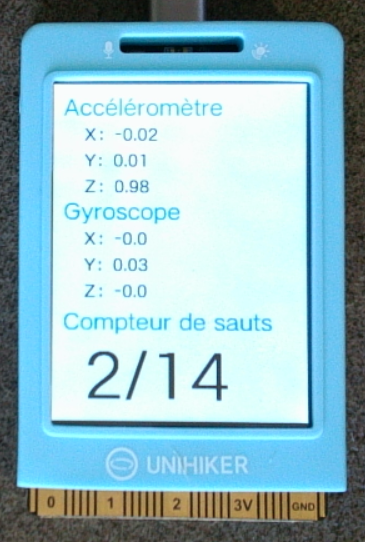
Compteur de sauts
L’UNIHIKER est également équipé d’un accéléromètre et d’un gyroscope 6 axes, capables de lire les valeurs x, y et z de l’accéléromètre et du gyroscope individuellement. Cette fonctionnalité permet de créer un compteur de saut : les valeurs de l’accéléromètre et du gyroscope s’affichent à l’écran, et le nombre de saut est calculé et affiché en fonction de l’intensité de l’accélération.
from pinpong.extension.unihiker import *
from pinpong.board import Board,Pin
from unihiker import GUI
import time
# Chronomètre du temps du jeu
chrono = 0
# Compteur de sauts
value = 0
# Réinitialisation des compteurs avec le bouton A
def on_buttona_click_callback():
global chrono
global value
chrono = 0
value = 0
# Initialisation de la carte et de l'interface
Board().begin()
gui = GUI()
# Affichage des données
gui.draw_text(text="Accéléromètre",x=10,y=5,font_size=16, color="#0000FF")
gui.draw_text(text="Gyroscope",x=10,y=105,font_size=16, color="#0000FF")
gui.draw_text(text="Compteur de sauts",x=10,y=210,font_size=16, color="#0000FF")
accelerometer_x = gui.draw_text(text="X:",x=30,y=35,font_size=12, color="#000000")
accelerometer_y = gui.draw_text(text="Y:",x=30,y=60,font_size=12, color="#000000")
accelerometer_z = gui.draw_text(text="Z:",x=30,y=85,font_size=12, color="#000000")
gyroscope_x = gui.draw_text(text="X:",x=30,y=135,font_size=12, color="#000000")
gyroscope_y = gui.draw_text(text="Y:",x=30,y=160,font_size=12, color="#000000")
gyroscope_z = gui.draw_text(text="Z:",x=30,y=185,font_size=12, color="#000000")
pedometer=gui.draw_text(text=value,x=30,y=230,font_size=45, color="#000000")
# Attente appui bouton A pour commmencer
gui.wait_a_click()
# Initialisation pour interception l'appui sur le bouton A
gui.on_a_click(on_buttona_click_callback)
while True:
# Récupération des mouvements par l'accéléromètre et le gyroscope
accelerometer_x.config(text=(str("X:") + str(accelerometer.get_x())))
accelerometer_y.config(text=(str("Y:") + str(accelerometer.get_y())))
accelerometer_z.config(text=(str("Z:") + str(accelerometer.get_z())))
gyroscope_x.config(text=(str("X:") + str(gyroscope.get_x())))
gyroscope_y.config(text=(str("Y:") + str(gyroscope.get_y())))
gyroscope_z.config(text=(str("Z:") + str(gyroscope.get_z())))
# Comptage de sauts
if (accelerometer.get_strength() > 1.5):
value = (value + 1)
# Affichage des sauts et du chronomètre
pedometer.config(text=str(value) + "/" + str(int(chrono)))
time.sleep(0.1)
chrono +=0.1
Dans cet exemple, l’UNIHIKER est initialisé avec la fonction Board().begin() et un objet GUI est instancié. Ensuite, grâce à la méthode draw_text(), plusieurs objets texte sont créés pour afficher les valeurs d’accélération, de gyroscope et de nombre de pas, ainsi que leurs valeurs correspondantes.
Le programme principal utilise accelerometer.get_x(), accelerometer.get_y() et accelerometer.get_z() pour obtenir les valeurs x, y et z de l’accélération, et gyroscope.get_x(), gyroscope.get_y() et gyroscope.get_z() pour les valeurs x, y et z du gyroscope. Ces valeurs sont ensuite affichées à l’écran grâce à la méthode config() de l’objet texte.
De plus, le nombre de saut est calculé à l’aide de la fonction accelerometer.get_strength() et incrémenté de 1 lorsque l’intensité d’accélération dépasse 1,5.
Le nombre de sauts est affiché à l’écran avec le chronomètre via la méthode config() de l’objet texte.