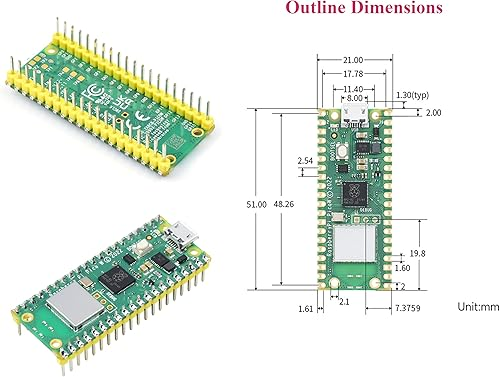
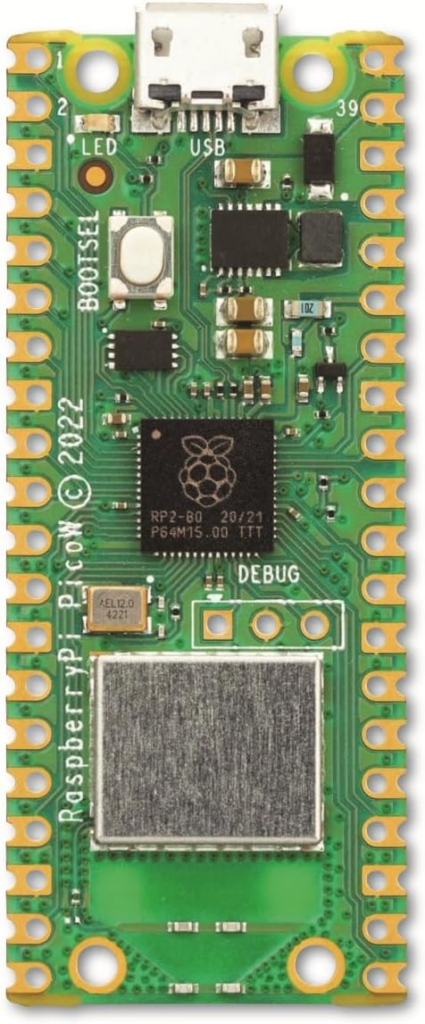
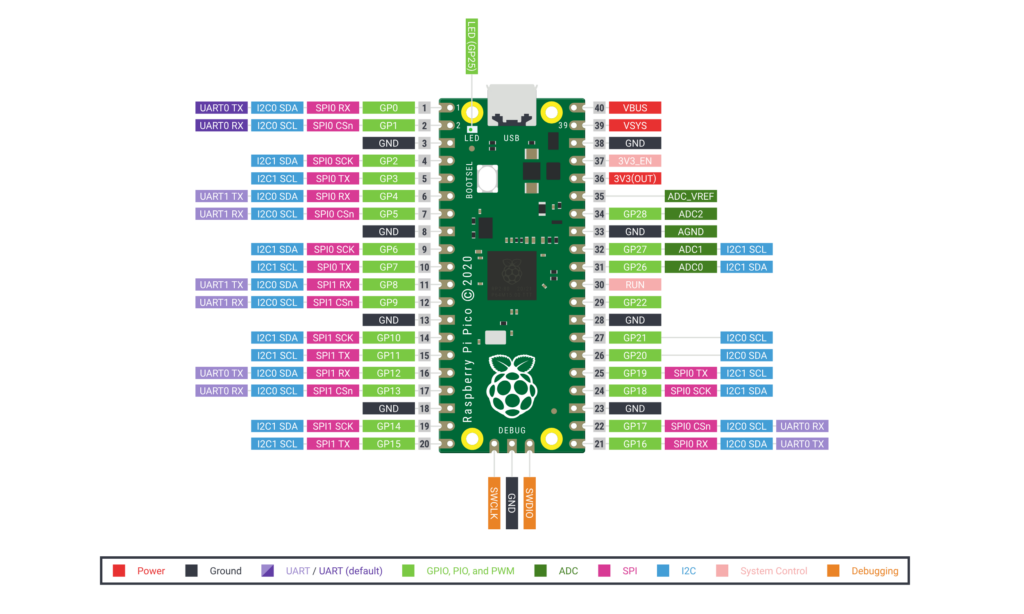
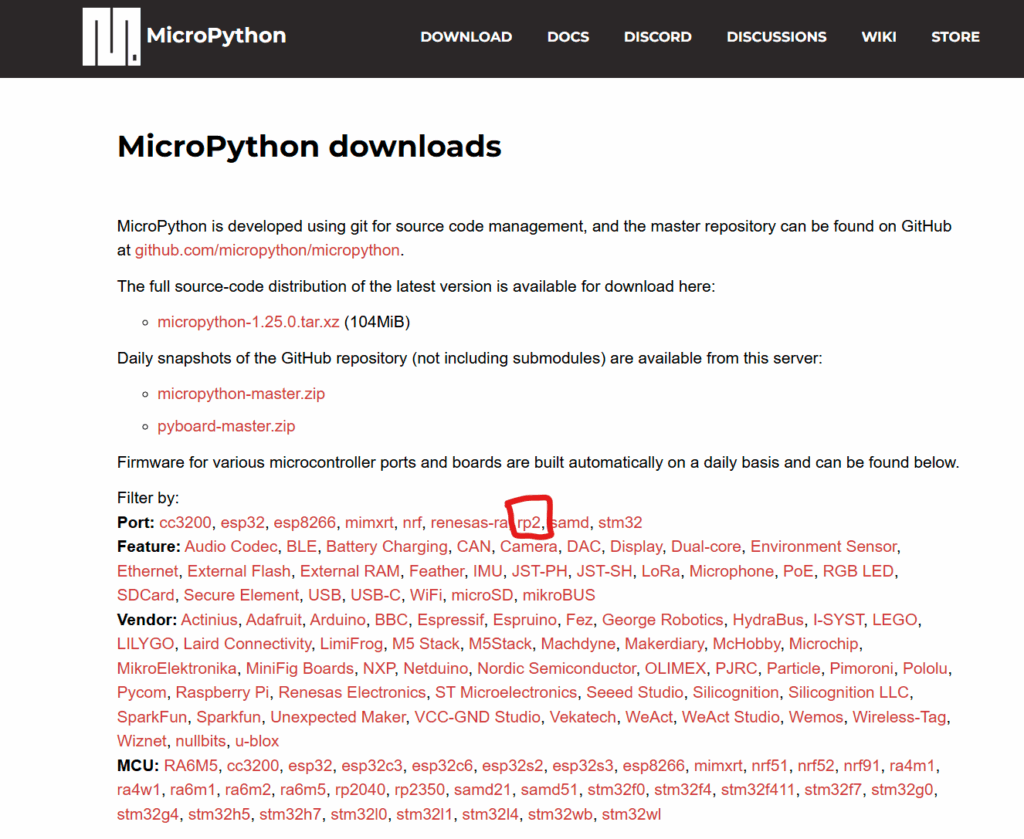
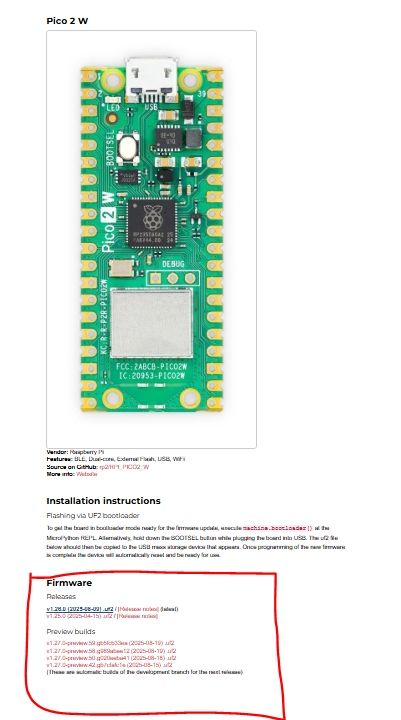
RASPBERRY PICO W
Le capteur de couleur TCS34725 (Gravity)

À quoi ça sert sur notre robot ?
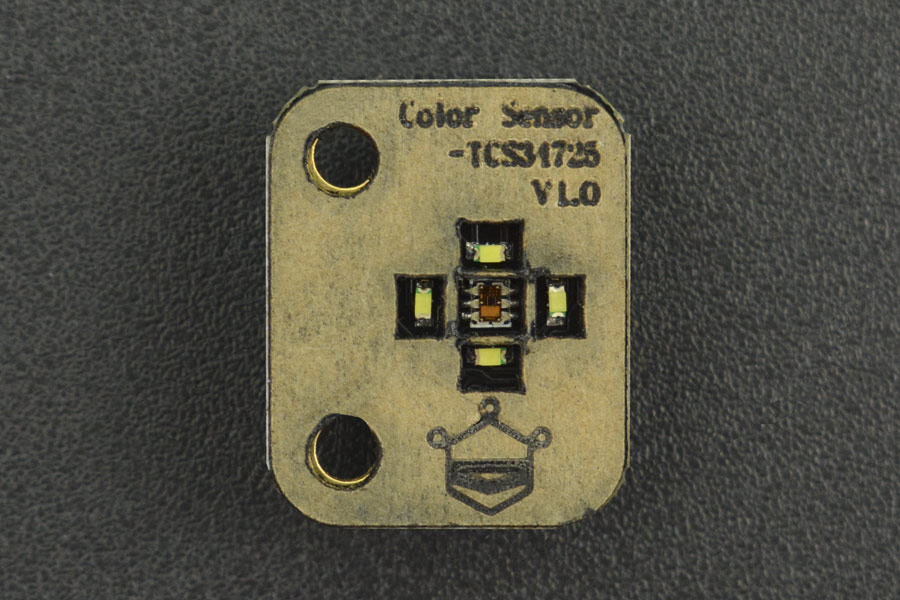
Le TCS34725 est un capteur de couleur.
Sur la compétition Rescue Line, il sert principalement à :
- suivre la ligne noire
- repérer les carrés verts pour savoir quand tourner à droite ou à gauche
Comment “voit” le capteur ?
Il éclaire le sol
Le capteur possède quatre petites LEDs blanches.
- Elle éclaire le sol juste en dessous du robot
- La lumière rebondit sur le sol et revient vers le capteur
- Un sol clair renvoie beaucoup de lumière
- Un sol foncé (ligne noire) renvoie peu de lumière
Il sépare la lumière en couleurs
À l’intérieur du capteur, il y a 4 détecteurs :
- 🔴 Rouge (R)
- 🟢 Vert (G)
- 🔵 Bleu (B)
- ⚪ Luminosité totale (Clear)
Pour chaque couleur, le capteur donne un nombre.
Ces nombres sont envoyés au microcontrôleur (ex : Raspberry Pico, mBot, etc.).
Le multiplexeur I2C
Pourquoi on en a besoin avec plusieurs capteurs de couleur ?
Rappel : c’est quoi le bus I2C ?
Le bus I2C, c’est comme une route avec quatres fils :
- SDA : pour envoyer et recevoir les données
- SCL : pour donner le rythme (l’horloge)
Tous les capteurs sont branchés sur la même route et parlent avec le microcontrôleur.
Avec un bus I2C ont peut dialoguer avec plusieurs dispositifs sur le même bus.
Chaque capteur a une adresse
Sur cette route, chaque capteur a une adresse, comme un numéro de maison.
Exemple :
- Capteur température : adresse
0x48 - Capteur distance : adresse
0x29 - Capteur couleur TCS34725 : adresse
0x29
Quand le microcontrôleur veut parler à un capteur, il dit :
« Je parle au capteur numéro 0x29 »
Le problème avec plusieurs capteurs identiques
Dans notre robot, on utilise plusieurs capteurs de couleur identiques :
- gauche
- centre
- droite
Et ils ont tous la même adresse I2C
Résultat :
- Le microcontrôleur dit :
« Capteur 0x29, réponds ! » - Tous répondent en même temps
- Ça crée un conflit → le bus ne fonctionne plus
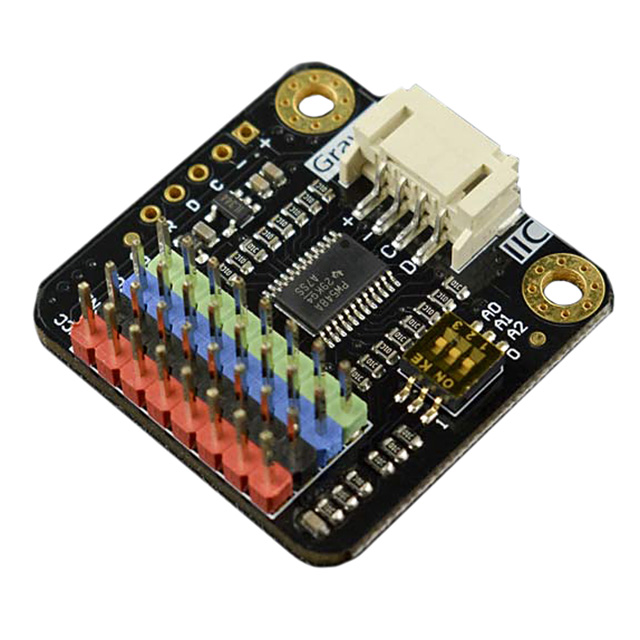
La solution : le multiplexeur I2C
Un multiplexeur I2C (ex : TCA9548A) est comme :
un aiguillage ou un feu de circulation pour le bus I2C
Il permet de choisir quel capteur est connecté au bus à un instant donné.
Comment fonctionne le multiplexeur ?
Le multiplexeur est lui-même un appareil I2C
- Il a sa propre adresse
- Le microcontrôleur peut lui parler
Il possède plusieurs “canaux” de 1 à 8 canaux
Par exemple :
- canal 0
- canal 1
- canal 2
- …
- jusqu’à 8 canaux
Chaque canal peut avoir :
- un capteur
- ou même plusieurs capteurs (s’ils ont des adresses différentes)
On ouvre un canal à la fois
Le microcontrôleur dit au multiplexeur :
« Ouvre le canal 2 »
Résultat :
- Seul le capteur branché sur le canal 2 est visible
- Les autres sont déconnectés temporairement
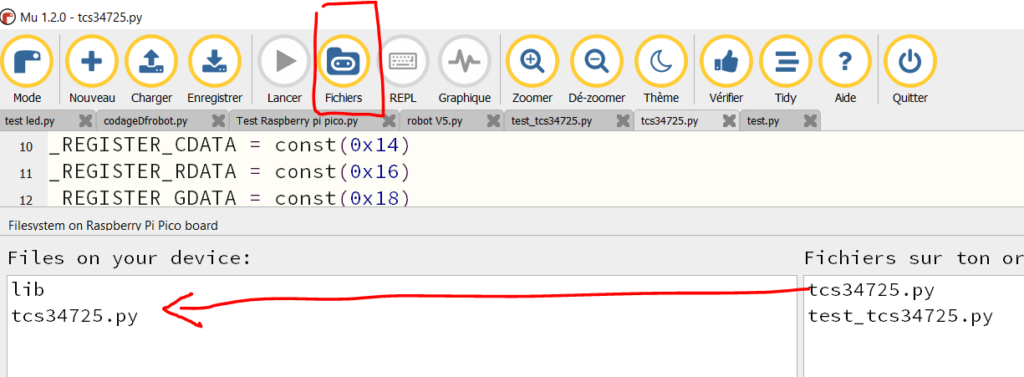
Pour programmer, le capteur TCS34725 utilise la librairie class tcs34725.py à télécharger sur le microcontroleur :
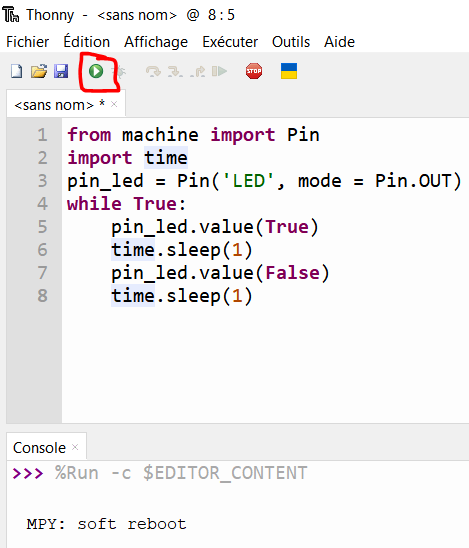
Dans ton programme importe ces bibliothèques :
from machine import I2C
import time
from tcs34725 import TCS34725Recherche les adresses sur le bus i2c :
from machine import I2C
import time
from tcs34725 import TCS34725
print("Initialisation I2C...")
i2c = I2C(0)
print("Scan I2C en cours...")
devices = i2c.scan()
print("Adresses trouvées:", [hex(d) for d in devices])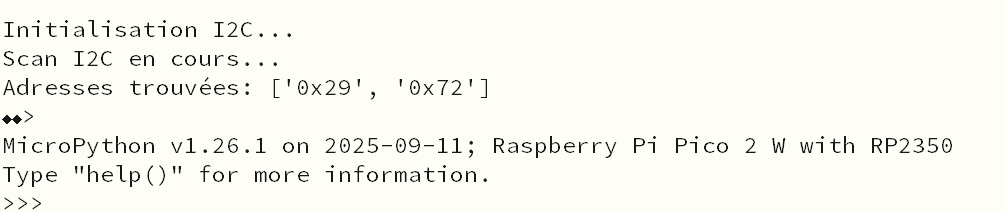
- 0x29 : capteur de couleur
- 0x72 : multiplexeur i2c
Exemple d’un programme de test pour lire les valeurs de deux capteurs sur les port 0 et 1 :
from machine import I2C
import time
from tcs34725 import TCS34725
print("Initialisation I2C...")
i2c = I2C(0)
print("Scan I2C en cours...")
devices = i2c.scan()
print("Adresses trouvées:", [hex(d) for d in devices])
# Initialisation du capteur
# Si vous n'utilisez PAS de multiplexeur, laissez multiplexer_addr=None
# Si vous en utilisez un, changez multiplexer_addr=0x70 (ou autre) et le port=0-7
ADDRESS_MULTIPLEXER = const(0x72)
try:
print("Initialisation TCS34725...")
#sensor = TCS34725(i2c)
# Pour un multiplexeur:
sensor01 = TCS34725(i2c, ADDRESS_MULTIPLEXER, 0)
sensor02 = TCS34725(i2c, ADDRESS_MULTIPLEXER, 1)
print("Capteur trouvé !")
# Configuration optionnelle
sensor01.integration_time(50) # 50ms (plus rapide mais moins précis que 2.4ms * n)
sensor01.gain(4) # Gain 4x (1, 4, 16, 60)
sensor02.integration_time(50)
sensor02.gain(4)
while True:
# Lecture brute
r, g, b, c = sensor01.read(raw=True)
# Lecture interprétée
temp, lux = sensor01.read(raw=False) # Note: refait une lecture
print(f"R:{r} G:{g} B:{b} C:{c} | Temp:{temp}K Lux:{lux}")
gray01 = sensor01.read_grayscale()
gray02 = sensor02.read_grayscale()
print("Read Gray : ", gray01)
# Détection simple couleur
if sensor01.is_red():
print(" >> ROUGE détecté !")
elif sensor01.is_green():
print(" >> VERT détecté !")
elif sensor01.is_blue():
print(" >> BLEU détecté !")
time.sleep(1)
except RuntimeError as e:
print("ERREUR FATALE:", e)
except Exception as e:
print("Erreur inattendue:", e)Exemple initialisation capteur de couleur en direct sans le multiplexeur :
sensor = TCS34725(i2c)Exemple initialisation capteurs couleur via le multiplexeur :
sensor01 = TCS34725(i2c, ADDRESS_MULTIPLEXER, 0)
sensor02 = TCS34725(i2c, ADDRESS_MULTIPLEXER, 1)Lecture de la nuance de gris :
gray01 = sensor01.read_grayscale()
print("Read Gray : ", gray01)Détection d’une couleur :
if sensor01.is_red():
print( » >> ROUGE détecté ! »)
elif sensor01.is_green():
print( » >> VERT détecté ! »)
elif sensor01.is_blue():
print( » >> BLEU détecté ! »)