Découvrir le code en python :
Bienvenue dans ce livret qui va te permettre de découvrir le monde
passionnant de la programmation avec le langage Python et la carte
micro:bit ! Tu vas t’amuser à apprendre les bases du codage tout en
explorant les fonctionnalités géniales de la carte micro:bit. Python est un langage de programmation puissant, mais pas compliqué une fois qu’on le comprend bien. Avec lui, tu pourras créer des jeux, contrôler des robots, afficher des messages et bien plus encore sur ta carte micro:bit.
Contrôler la carte micro:bit en python :
Dans ce livret, tu vas découvrir pas à pas comment écrire des lignes de code en Python pour contrôler ta carte micro:bit. N’aie pas peur, on va commencer par les bases, et tu verras à quel point coder peut-être amusant et créatif ! Alors, prêt à plonger dans le monde magique de la programmation avec Python et la carte micro:bit ? C’est parti !
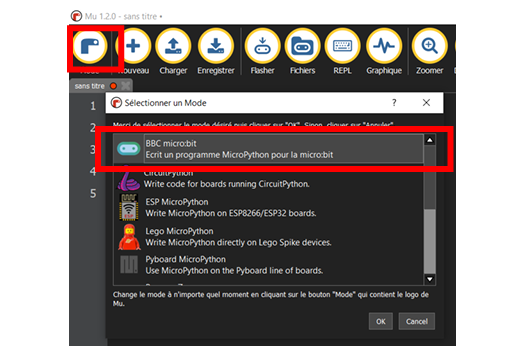
Editeur MU Python :
MU est choisi comme éditeur pour sa simplicité d’utilisation et sa
convivialité, spécialement conçu pour les débutants en programmation.
Son interface intuitive offre une plateforme idéale pour coder en Python pour la carte micro:bit. Avec ses fonctionnalités adaptées, MU facilite l’écriture, la modification et l’exécution du code, offrant ainsi une expérience d’apprentissage agréable et efficace dans le cadre de la robotique.
PARTIE 01 : Découverte de la MICRO:BIT et de PYTHON
Découverte de MU
Dans MU par le bouton Mode sélectionner BBC microbit :
Puis créé un nouveau fichier

La première fonction, toute simple, de la carte micro:bit consiste à afficher un texte qui va défiler lettre par lettre sur l’écran :
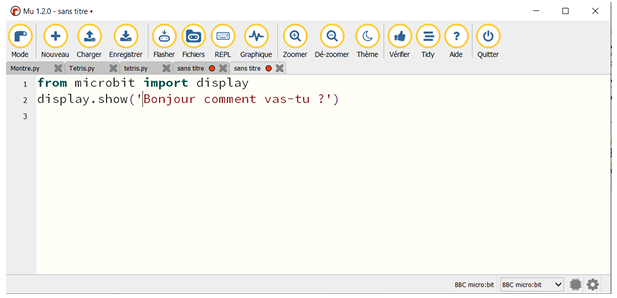
from microbit import display
display.show('Bonjour comment vas-tu ?') 
Que constates-tu après avoir téléversé le programme ?
Le texte doit défilé sur la carte micro :bit.
Tu peux simuler ton code sur le site : https://create.withcode.uk/
Copie et colle ton programme Python
Appuie ensuite sur les touches Ctrl+Entrée. Le simulateur démarre et affiche la carte micro:bit avec laquelle il est possible d’interagir.
PARTIE 02 : Afficher un dessin
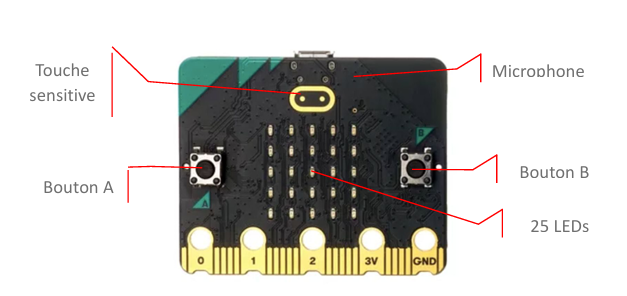
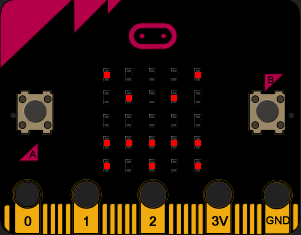
Il est possible d’afficher des icônes sur l’écran composé d’une matrice de 5×5 LEDs en utilisant la commande display.show().
from microbit import display
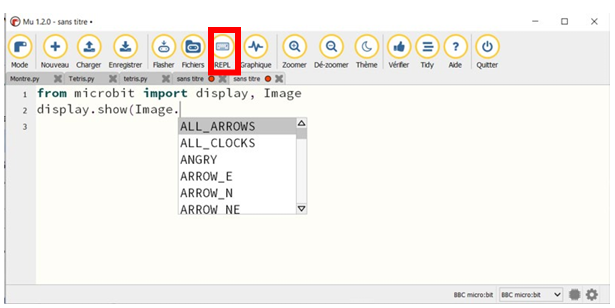
display.show(Image.ANGRY)Utilise l’icône « Vérifier » pour ton code : il te manque l’objet « Image »
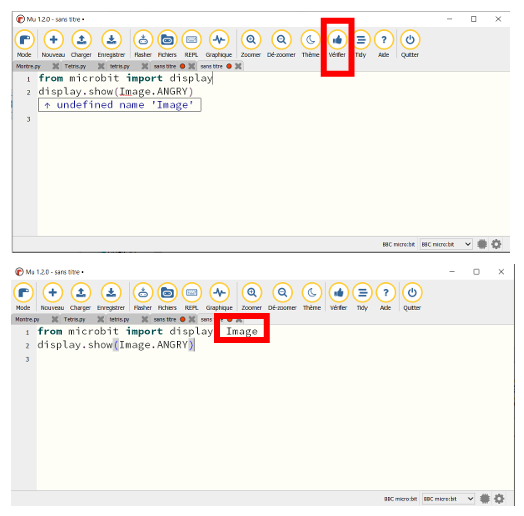
from microbit import display, Image
display.show(Image.ANGRY) Que constates-tu après avoir téléversé le programme ?
L’icone s’affiche sur l’écran des 25 LEDs ?
Pour connaître toutes les images possibles deux solutions :
Solution 1 :
Solution 2 :
Utilise l’icône « REPL » et dans la fenêtre ouverte frappe les indications
suivantes :
from microbit import *
dir(display)
dir(Image)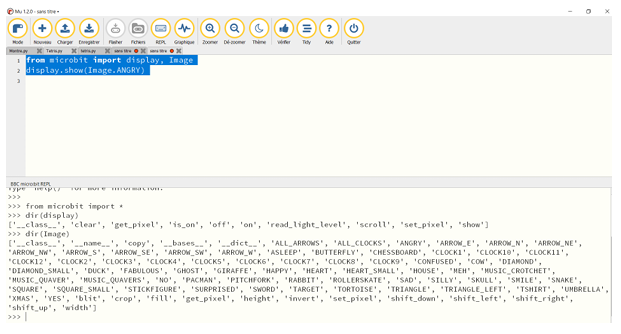
PARTIE 03 : Créer sa propre icône
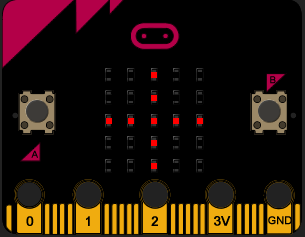
Tu peux concevoir ta propre icône en spécifiant quelles LEDs doivent être allumées pour dessiner l’image désirée.
from microbit import display, Image
led_image = Image('00900:00900:99999:00900:00900')
display.show(led_image)Que constates-tu après avoir téléversé le programme ?
A quoi correspond les 0 et les 9 de led_image ?
Comment modifier led_image pour avoir ton icône ?
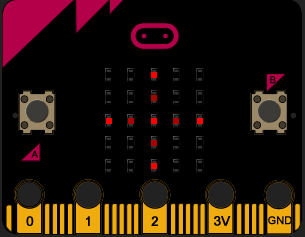
Tu as la possibilité de contrôler l’intensité de chaque LED en ajustant la valeur de chacune sur une échelle de 1 à 9.
from microbit import display, Image
led_image = Image( '00900:00500:95959:00500:00900')
display.show(led_image)Que constates-tu après avoir téléversé le programme ?
Vois-tu des différences d’intensité entre chaque LED ?
PARTIE 04 : Faire clignoter une icône
Pour créer un effet de clignotement d’une icône, tu dois afficher cette dernière pendant une durée déterminée, puis éteindre la matrice de LEDs.
from microbit import display,Image
import time
while True:
led_image = Image('00900:00900:99999:00900:00900')
display.show(led_image)
time.sleep(0.5)
display.clear()
time.sleep(0.5) Que constates-tu après avoir téléversé le programme ?
Comment peux-tu modifier pour un clignotement plus rapide ou plus lent ?
PARTIE 05 : Afficher un chronomètre en seconde
Afficher les aiguilles toutes les secondes.
from microbit import display,Image
import time
seconde=0
while True:
if seconde==0:
display.show(Image.CLOCK12)
if seconde==1:
display.show(Image.CLOCK1)
if seconde==2:
display.show(Image.CLOCK2)
if seconde==3:
display.show(Image.CLOCK3)
if seconde==4:
display.show(Image.CLOCK4)
if seconde==5:
display.show(Image.CLOCK5)
if seconde==6:
display.show(Image.CLOCK6)
if seconde==7:
display.show(Image.CLOCK7)
if seconde==8:
display.show(Image.CLOCK8)
if seconde==9:
display.show(Image.CLOCK9)
if seconde==10:
display.show(Image.CLOCK10)
if seconde==11:
display.show(Image.CLOCK11)
seconde=-1
time.sleep(1)
seconde+=1 
PARTIE 06 : Animer des images et jouer une note
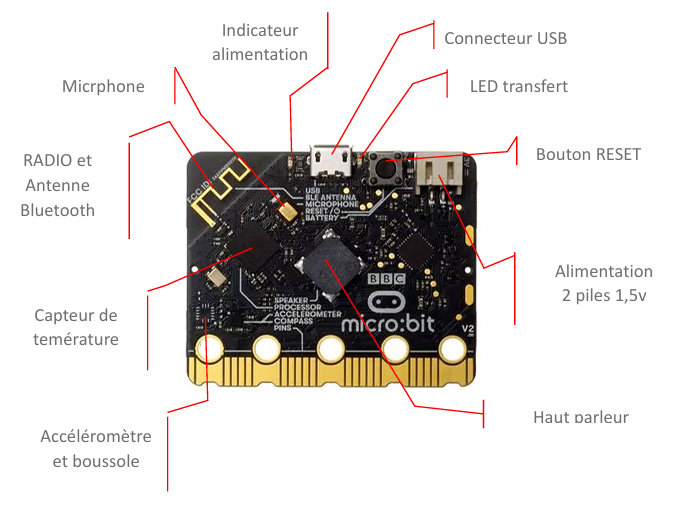
La carte micro:bit dispose d’un buzzer. Programme le battement d’un cœur !
from microbit import *
import time
import music
# Buzzer on pin_speaker
while True:
display.show(Image.HEART)
time.sleep(1)
led_image = Image('00000:09090:09990:00900:00000')
display.show(led_image)
music.pitch(200, duration=500) PARTIE 07 : Utiliser les boutons
La carte micro:bit dispose de deux boutons permettant de déclencher des actions : le bouton A à gauche de la carte, le bouton B à droite.
Programme en utilisant le bouton A :
from microbit import display, button_a, Image
import time
while True:
if button_a.is_pressed():
led_image = Image("40004:06060:00900:06060:40004")
display.show(led_image)
time.sleep(0.5)
display.clear()
time.sleep(0.5)
led_image = Image("33333:30003:30003:30003:33333")
display.show(led_image)
Optimise ton code :
from microbit import display, button_a, Image
import time
led_image_a = Image("40004:06060:00900:06060:40004")
led_image = Image("33333:30003:30003:30003:33333")
while True:
if button_a.is_pressed():
display.show(led_image_a)
time.sleep(0.5)
display.clear()
time.sleep(0.5)
display.show(led_image) Programme en utilisant le bouton A et le bouton B:
from microbit import display, button_a, button_b, Image
import time
led_image_a = Image("90009:09090:00900:09090:90009")
led_image_b = Image("99999:99999:99999:99999:99999")
led_image = Image("33333:30003:30003:30003:33333")
while True:
if button_a.is_pressed():
display.show(led_image_a)
time.sleep(0.5)
display.clear()
time.sleep(0.5)
if button_b.is_pressed():
display.show(led_image_b)
time.sleep(0.5)
display.clear()
time.sleep(0.5)
display.show(led_image) PARTIE 08 : Utiliser la touche sensitive

Touche la touche sensitive pour changer les LEDs.
from microbit import display, Image, pin_logo
import time
while True:
# Détection de la zone sensible
if pin_logo.is_touched():
led_image = Image('90009:09090:00900:09090:90009')
display.show(led_image)
# Affichage tant que la zone sensible est touchée
while pin_logo.is_touched():
pass
led_image = Image('00900:00900:99999:00900:00900')
display.show(led_image)Que constates-tu après avoir téléversé le programme ?
Les LEDs changent quand tu passes ton doigt sur la zone sensitive ?
PARTIE 09 : Utiliser la touche sensitive et les boutons
Modifie ton programme sur le battement du cœur pour augmenter ou baisser la note par les touches A et B, activer ou éteindre le son avec la zone sensitive.
from microbit import display, Image, button_a, button_b, pin_logo
import time
import music
note = 200
on = True
start = time.time()
while True:
# Battement du coeur toutes les 1 seconde
if time.time() - start > 1:
start = time.time()
display.clear()
if on :
music.pitch(note, 200)
time.sleep(0.1)
else:
display.show(Image.HEART)
# Modification de la note avec la touche A
if button_a.is_pressed():
if note > 0 :
note -= 10
while button_a.is_pressed():
pass
on = True
# Modification de la note avec la touche B
if button_b.is_pressed():
if note < 600 :
note += 10
while button_b.is_pressed():
pass
on = True
# Activer ou non le battement du coeur
if pin_logo.is_touched():
if on :
on = False
else:
on = True
while pin_logo.is_touched() :
pass PARTIE 10 : Secouer les LEDs
Secouer la carte pour allumer les LEDs.
from microbit import display, Image, accelerometer
import time
while True:
if accelerometer.current_gesture() == 'shake' :
led_image = Image('90009:09090:00900:09090:90009')
display.show(led_image)
time.sleep(0.1)
led_image = Image('00900:00900:99999:00900:00900')
display.show(led_image)Que constates-tu après avoir téléversé le programme ?
Tu peux essayer ces différentes possibilités :
- « shake » : secoué
- « up » : vers le haut
- « down » : vers le bas
- « face up » : écran vers le haut
- « face down » : écran vers le bas
- « left » : penché à gauche
- « right » : penché à droite
- « freefall » : chute libre
- « 3g » : 3g
- « 6g » : 6g
- « 8g » : 8g
Documentation sur l’accéléromètre
from microbit import *
led_image = Image("33333:30003:30003:30003:33333")
while True:
if accelerometer.current_gesture() == 'face up':
display.show(Image.ARROW_N)
elif accelerometer.current_gesture() == 'face down':
display.show(Image.ARROW_S)
elif accelerometer.current_gesture() == 'left':
display.show(Image.ARROW_W)
elif accelerometer.current_gesture() == 'right':
display.show(Image.ARROW_E)
else:
display.show(led_image)PARTIE 11 : Utiliser le microphone
Claque des mains pour allumer les LEDs.
from microbit import *
microphone.set_threshold(SoundEvent.LOUD, 80)
while True:
if microphone.current_event() == SoundEvent.LOUD:
led_image = Image('90009:09090:00900:09090:90009')
display.show(led_image)
led_image = Image('00900:00900:99999:00900:00900')
display.show(led_image)from microbit import *
import time
while True:
if microphone.sound_level() > 64:
led_image = Image('90009:09090:00900:09090:90009')
display.show(led_image)
time.sleep(0.3)
else:
led_image = Image('00900:00900:99999:00900:00900')
display.show(led_image)Que constates-tu après avoir téléversé le programme ?
Essaye d’allumer les LEDs d’un claquement de mains, elles doivent rester allumer. Puis claque des mains pour les éteindre.
PARTIE 12 : Jouer de la musique
Joue différentes musiques en appuyant sur les boutons A et B et sur la zone sensitive.
from microbit import button_a, button_b, pin_logo, pin_speaker
import time
def pitch(pin, noteFrequency, noteDuration, silence_ms=10):
if noteFrequency != 0:
microsecondsPerWave = 1e6 / noteFrequency
millisecondsPerCycle = 1000 / (microsecondsPerWave * 2)
loopTime = noteDuration * millisecondsPerCycle
for x in range(int(loopTime)):
pin.write_digital(1)
time.sleep(int(microsecondsPerWave))
pin.write_digital(0)
time.sleep(int(microsecondsPerWave))
else:
time.sleep_ms(noteDuration)
time.sleep_ms(silence_ms)
def BuzzerStarWars(pin):
NOTES = ([293.66, 293.66, 293.66, 392.0, 622.25, 554.37,
523.25, 454, 932.32, 622.25, 554.37, 523.25,
454, 932.32, 622.25, 554.37, 523.25, 554.37, 454])
DURATIONS = ([180, 180, 180, 800, 800, 180, 180, 180, 800,
400, 180, 180, 180, 800, 400, 180, 180, 180, 1000])
SILENCE_DELAYS = ([40, 40, 40, 100, 100, 40, 40, 40, 100, 50,
40, 40, 40, 100, 50, 40, 40, 40, 100])
for i in range(len(NOTES)):
pitch(pin, NOTES[i], DURATIONS[i], SILENCE_DELAYS[i])
def BuzzerR2D2(pin):
R2D2_NOTES = ([3520, 3135.96, 2637.02, 2093, 2349.32,
3951.07, 2793.83, 4186.01, 3520, 3135.96,
2637.02, 2093, 2349.32, 3951.07, 2793.83, 4186.01])
for i in range(len(R2D2_NOTES)):
pitch(pin, R2D2_NOTES[i], 80, 20)
def BuzzerCarribeanPirates(pin):
NOTES_1 = ([330, 392, 440, 440, 0, 440, 494, 523, 523,
0, 523, 587, 494, 494, 0, 440, 392, 440, 0])
DURATIONS_1 = ([125, 125, 250, 125, 125, 125, 125, 250,
125, 125, 125, 125, 250, 125, 125, 125, 125, 375, 125])
NOTES_2 = ([330, 392, 440, 440, 0, 440, 523, 587, 587, 0,
587, 659, 698, 698, 0, 659, 587, 659, 440, 0,
440, 494, 523, 523, 0, 587, 659, 440, 0, 440,
523, 494, 494, 0, 523, 440, 494, 0])
DURATIONS_2 = ([125, 125, 250, 125, 125, 125, 125, 250, 125,
125, 125, 125, 250, 125, 125, 125, 125, 125,
250, 125, 125, 125, 250, 125, 125, 250, 125,
250, 125, 125, 125, 250, 125, 125, 125, 125, 375, 375])
for j in range(2):
for i in range(len(NOTES_1)):
pitch(pin, NOTES_1[i], DURATIONS_1[i])
for k in range(len(NOTES_2)):
pitch(pin, NOTES_2[k], DURATIONS_2[k])
while True:
if button_a.is_pressed():
BuzzerStarWars(pin_speaker)
if button_b.is_pressed():
BuzzerR2D2(pin_speaker)
if pin_logo.is_touched():
BuzzerCarribeanPirates(pin_speaker) Etape 13 Jouer aux dés
Secoue la micro :bit pour jouer aux dés.
from microbit import *
import random
import music
de_1 = Image('00000:00000:00900:00000:00000')
de_2 = Image('00009:00000:00000:00000:90000')
de_3 = Image('00009:00000:00900:00000:90000')
de_4 = Image('90009:00000:00000:00000:90009')
de_5 = Image('90009:00000:00900:00000:90009')
de_6 = Image('90009:00000:90009:00000:90009')
display.show('?')
nombre = 0
while True:
if accelerometer.current_gesture() == 'shake' :
nombre = random.randint(1, 6)
music.pitch(440, 50)
if nombre == 1:
display.show(de_1)
if nombre == 2:
display.show(de_2)
if nombre == 3:
display.show(de_3)
if nombre == 4:
display.show(de_4)
if nombre == 5:
display.show(de_5)
if nombre == 6:
display.show(de_6)