Pour que ton robot puisse passer les pentes, il doit déterminer quand il est dans cette situation et programmer pour éviter des anomalies de lecture du capteur RGB :
Détection de l’obstacle ou de la pente :
- Quand ton robot commence à monter une pente ou à passer un obstacle, la distance entre le capteur RGB (sous le robot) et le sol devient plus grande.
- À ce moment-là, le capteur RGB peut avoir du mal à donner des informations fiables au robot. Il peut même penser que les quatre capteurs voient la ligne, alors que ce n’est pas vrai.
Utilisation des capteurs de mouvement :
- Pour détecter cette situation, utilise les capteurs de mouvement du robot, notamment celui qui mesure l’inclinaison et tangage.
Réaction aux changements :
- Dès que tu détectes une inclinaison différente et que tous les capteurs semblent voir la ligne en même temps, cela signifie que le robot est en train de monter une pente ou de passer un obstacle.
- À ce moment-là, programme ton robot pour qu’il continue tout droit pendant un certain temps. Cela lui permettra de passer l’obstacle ou de monter la pente sans s’arrêter.
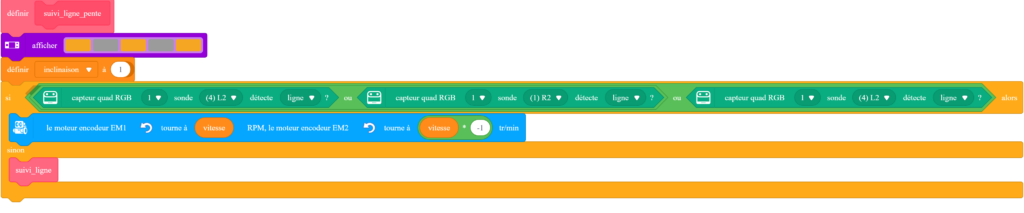
Teste l’inclinaison du robot en montée ou en descente :





Ce cas n’est pas possible sur une montée :
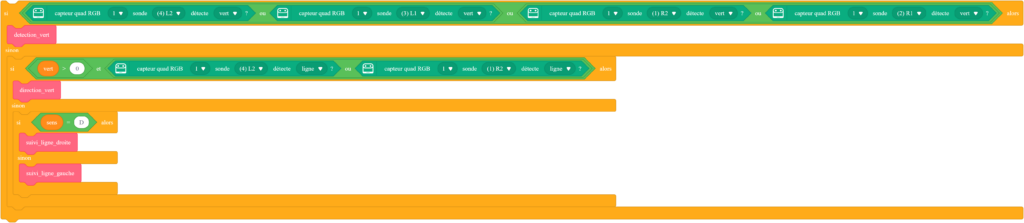
si le capteur RGB du robot ne voit plus correctement la ligne :


si le capteur de ligne voit en même la ligne :

En suivant ces étapes, ton robot pourra mieux gérer les obstacles et les pentes !
Lorsque le robot aborde une pente ou un obstacle la ligne noire est bien droite sans angle droit. Les capteurs L2 et R2 ne sont pas sensés capter la ligne noire. Si ces capteurs détectent une ligne noire alors on peut donc considérer qu’ils sont trop éloignés du sol pour tenir compte de leur résultat. Dans ces cas, on fait avancer le robot tout droit autrement on suit la ligne droite :