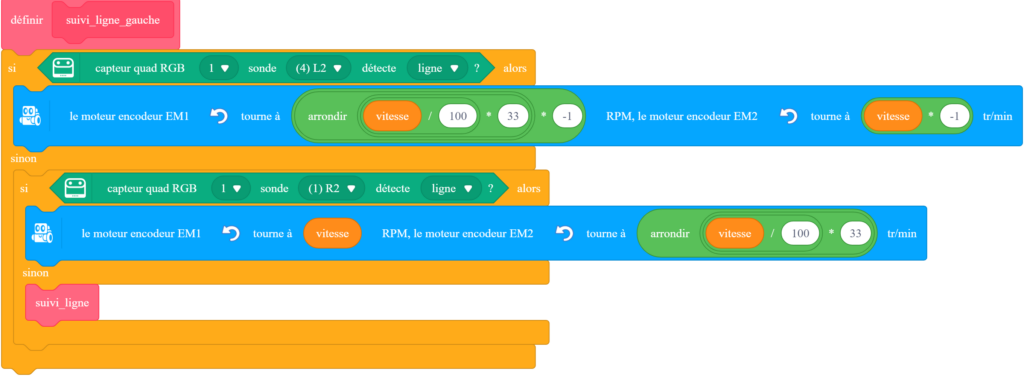
Suivre les angles droits
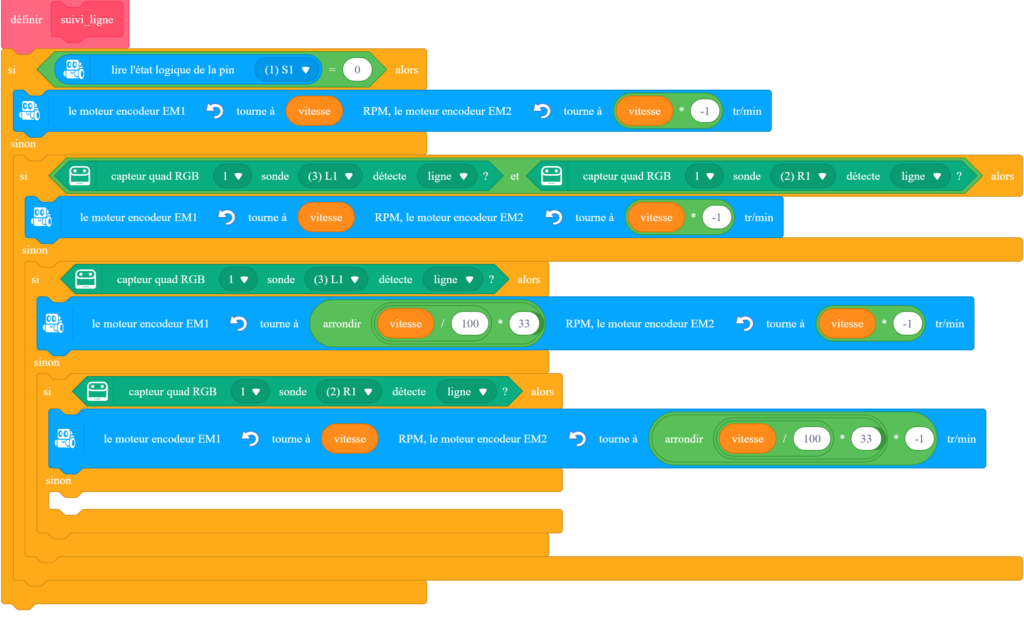
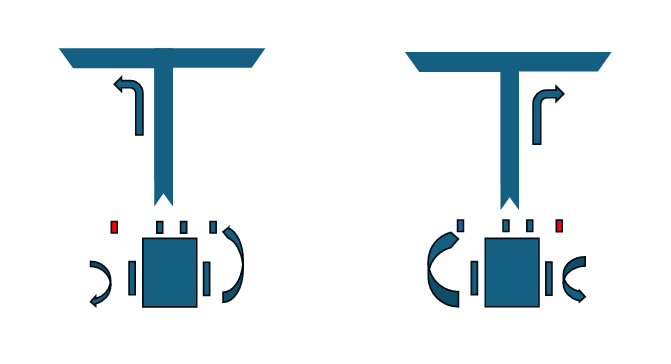
Tu remarques que le robot choisit à gauche sur un croisement :
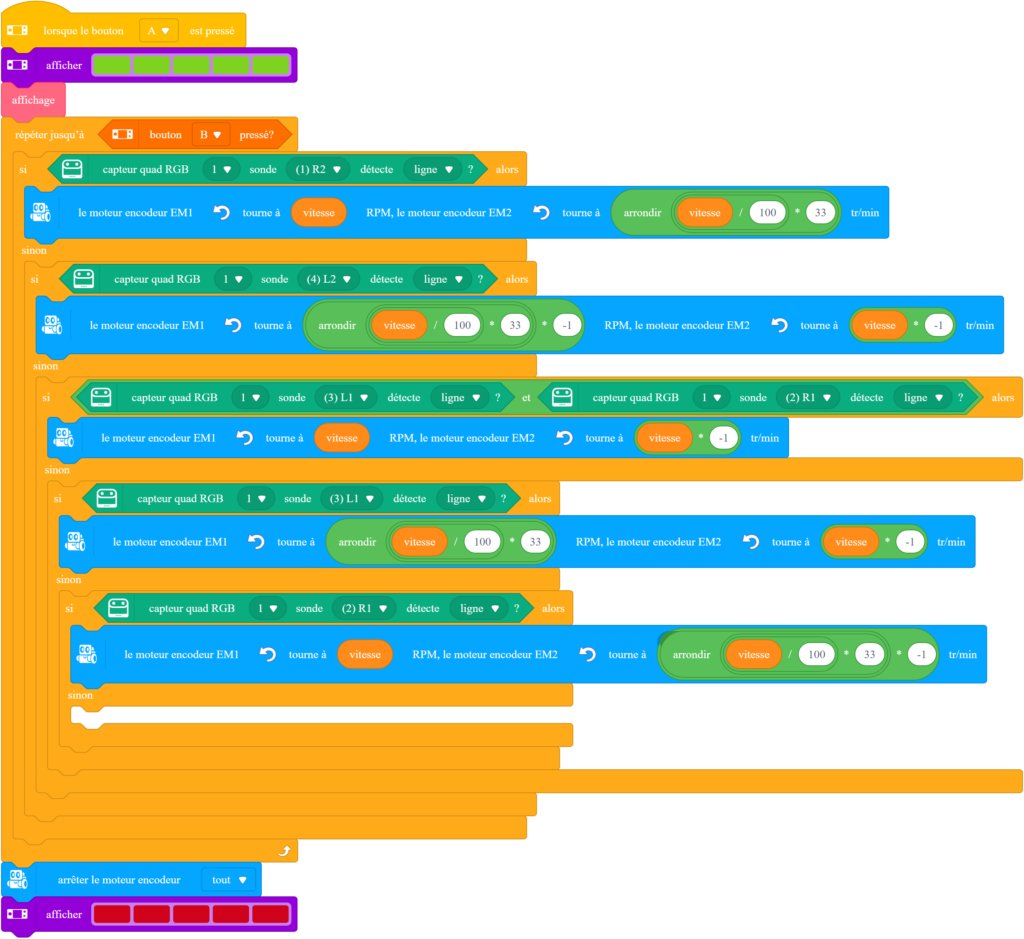
En inversant L2 par R2 le robot choisit au croisement par la droite :
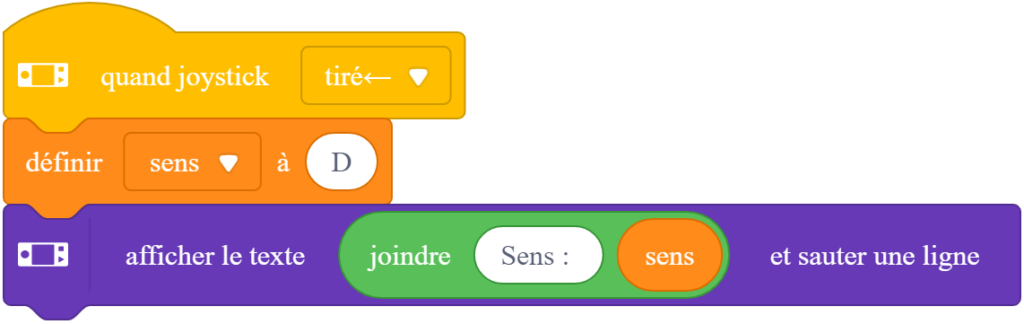
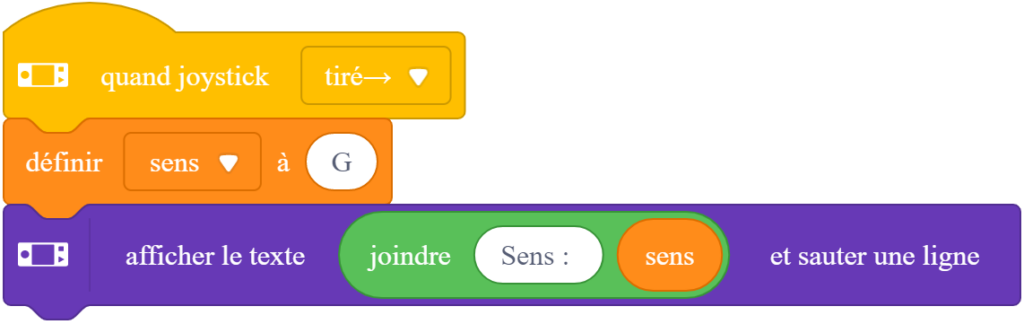
Choisir le sens
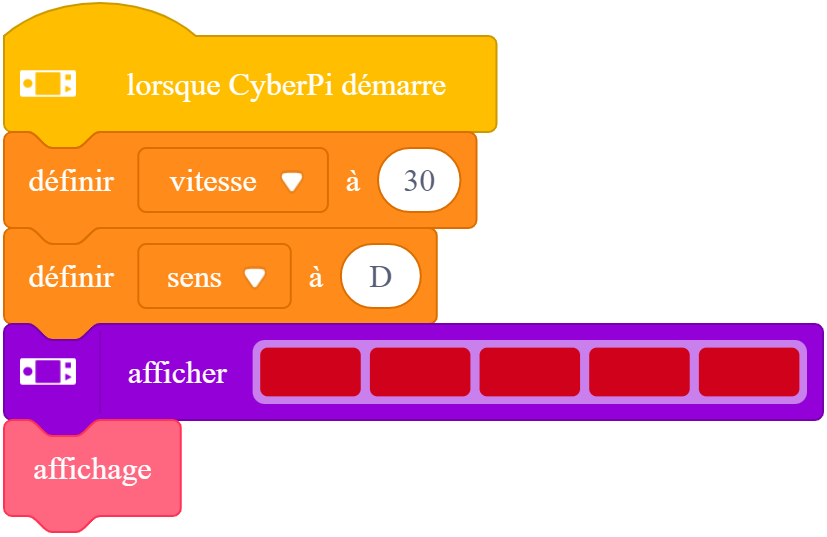
Crée une variable sens afin de déterminer dans quel sens le robot doit prendre les croisement :
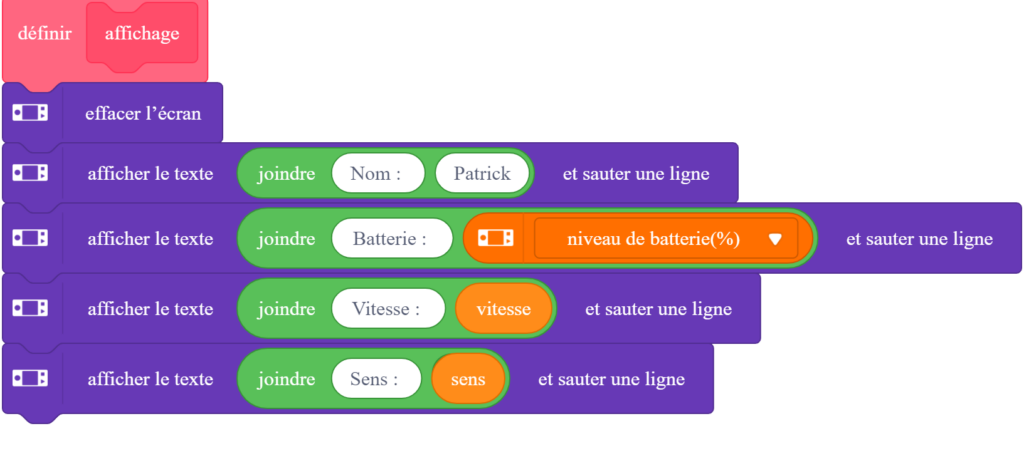
La variable sens prend deux valeurs :
- D pour droite
- G pour gauche
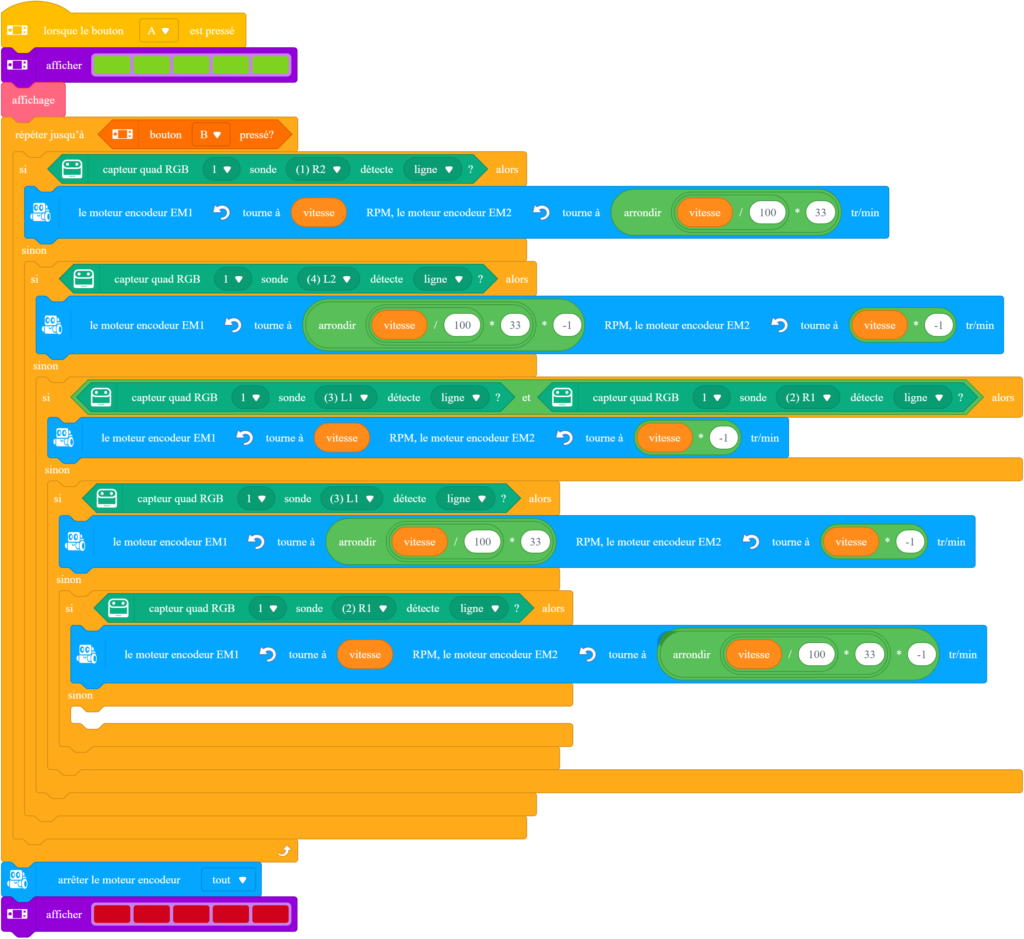
Modifie ton code pour créer ses fonctions :
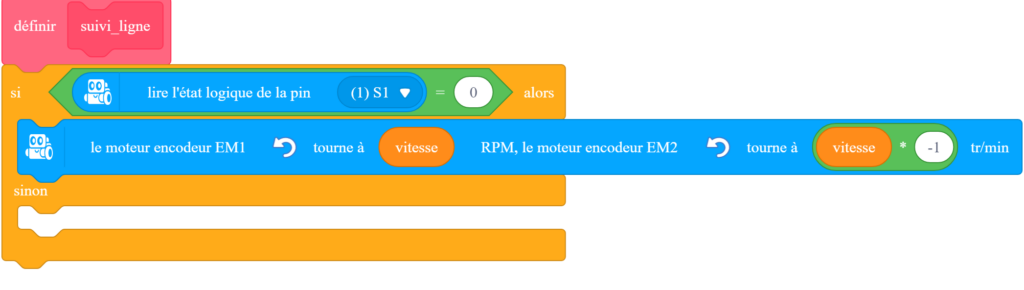
une fonction pour suivre la ligne noire

une fonction pour prendre les virages à angle droit en privilégiant la droite :

une fonction pour prendre les virages à angle droit en privilégiant la gauche :

pour modifier le sens avec le joystick
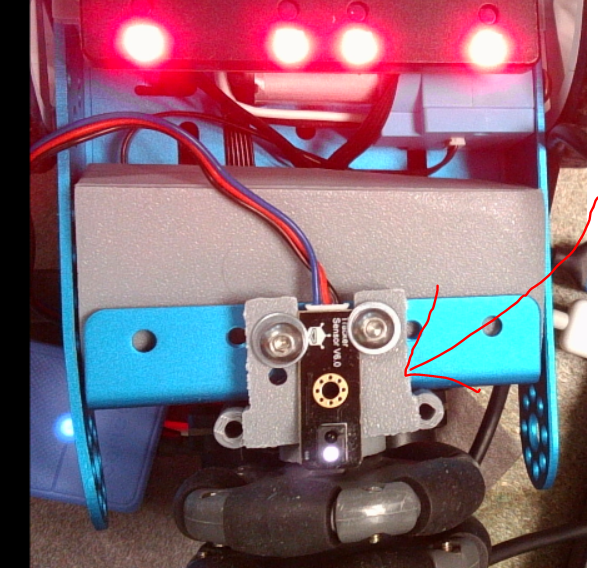
Suivi de ligne en utilisant un trackeur de ligne sur le port S1 du MBOT 2. Son utilisation permet au robot de mieux suivre en ligne droite la ligne noire.