Voici un exemple d’une programmation SCRATCH avec un robot Algora qui passe le parcours le plus difficile en utilisant deux photoréflecteurs.
Pour la construction du robot, trois préconisations :
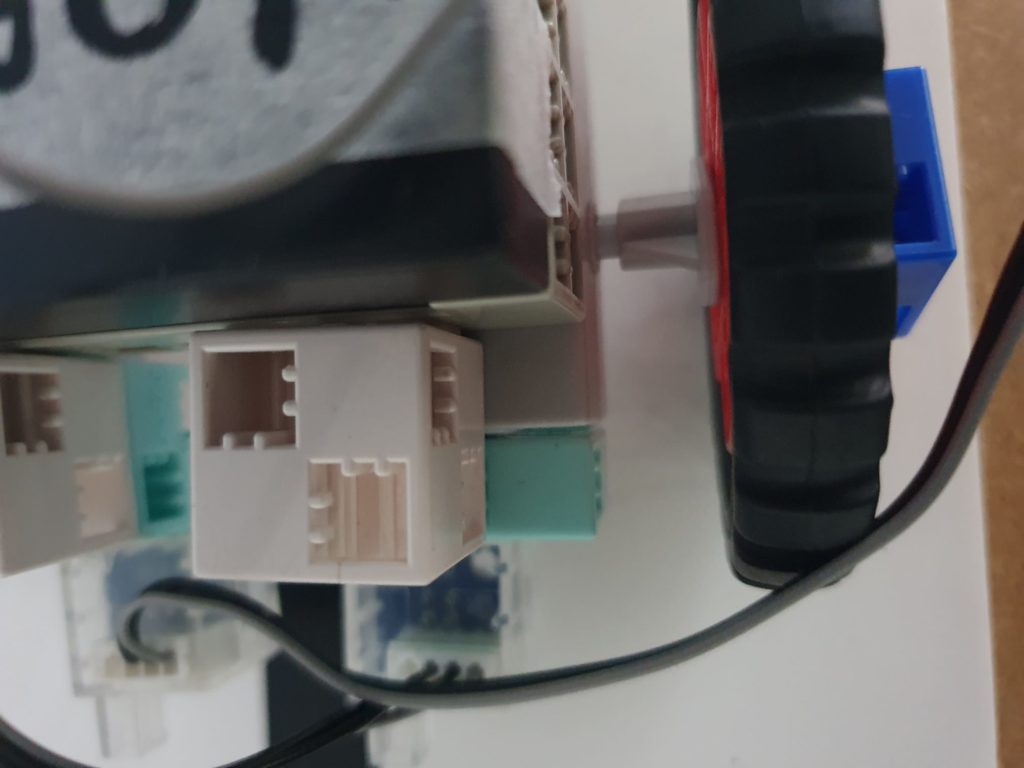
- l’espace entre les deux photoréflecteurs doit être légèrement supérieur à la largeur de la ligne noire.
- les photoreflecteurs doivent être le plus proche du sol
- les photoréflecteurs doivent être devant mais proche des roues directrices.
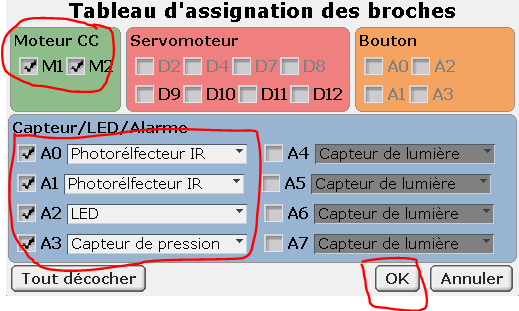
Utilise deux capteurs photo réflecteurs IR, un capteur de pression et une LED :
Active le mode test :
Pose ton robot et ses deux photo réflecteurs sur une ligne noire pour visualiser les valeurs retournées :
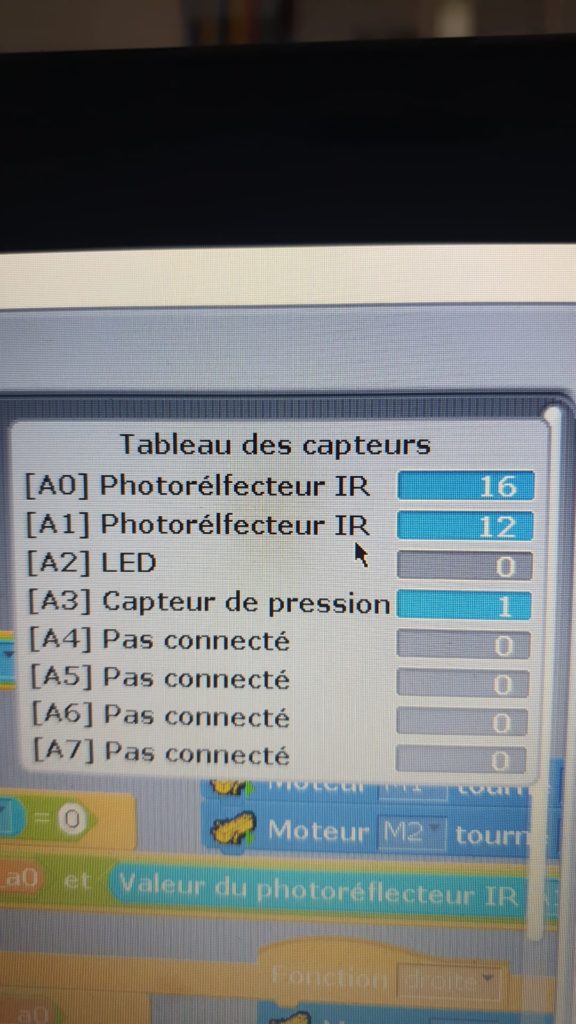
Tu peux constater les deux photo réflecteurs n’ont obligatoirement pas la même mesure de la valeur de la couleur de la ligne noire. Pour plus de justesse, utilise deux variables pour stocker la valeur de la ligne noire.
D’autre part, il semble plus pertinent de mesurer la ligne noire et d’utiliser cette valeur plutôt que le blanc. Tu peux constater également que la valeur retournée par les photoreflecteurs peut varier lors du déplacement du robot sur la ligne noire.
Utilise une variable « tolerance » afin de prendre en compte des variations dans les mesures de la ligne noire lors du parcours :
Donc avant le lancement du robot, réalise une prise des valeurs des photo réflecteurs sur la ligne noire.
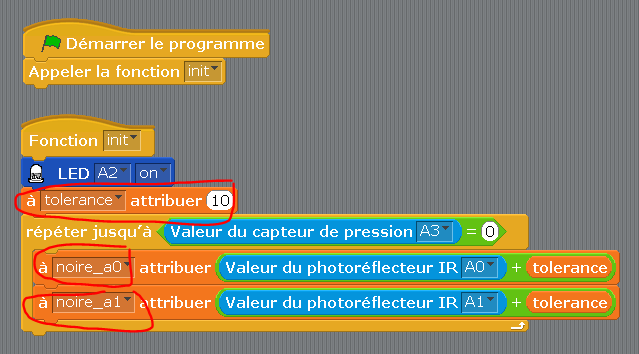
Les valeurs retournées par les deux photo réflecteurs sont mémorisées dans deux variables, une variable pour chaque photo réflecteur.
Afin de gérer les fluctuations des mesures du noir, attribue 10 à la variable tolérance.
Puis programme tes fonctions pour que ton robot se déplace tout droit, à droite et à gauche puis puisse s’arrêter.
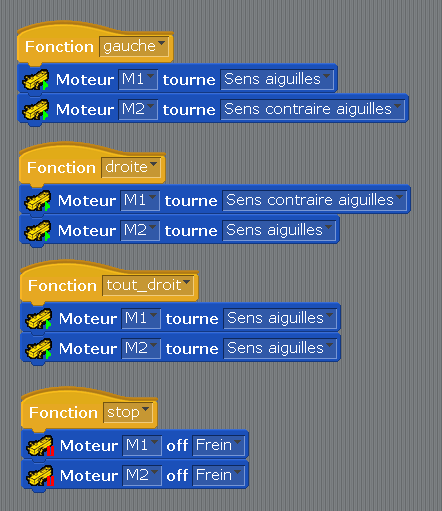
Pour passer les passages les plus difficiles, tu peux constater que la meilleure solution pour prendre des virages serrés est de faire tourner le robot sur lui même par une inversion des moteurs, un moteur vers l’avant, l’autre vers l’arrière.
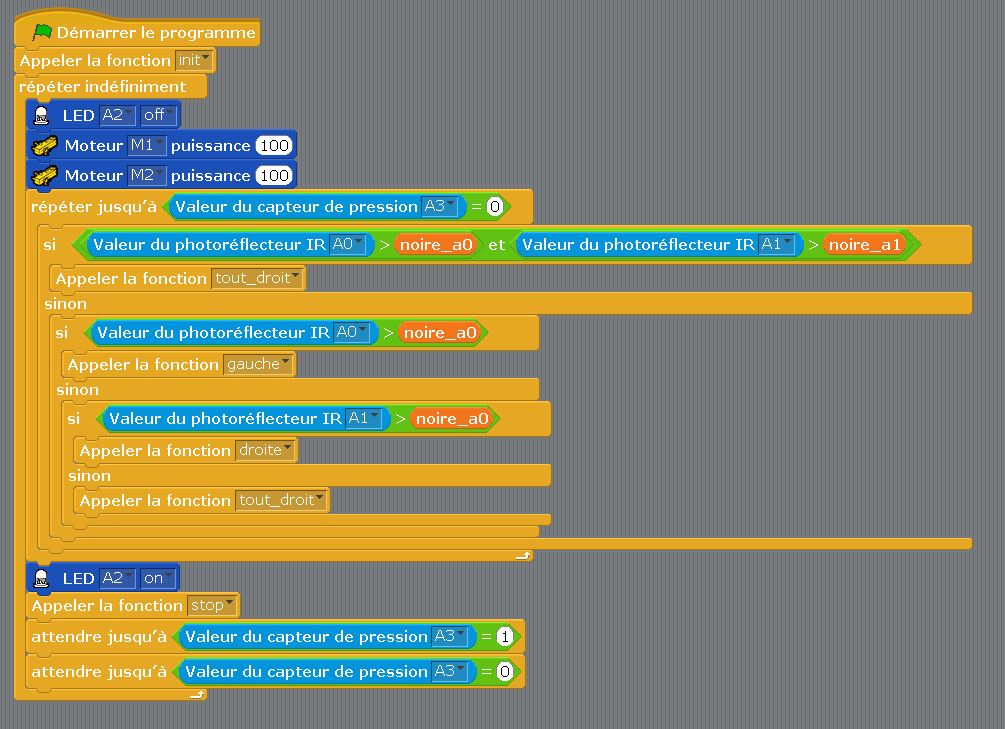
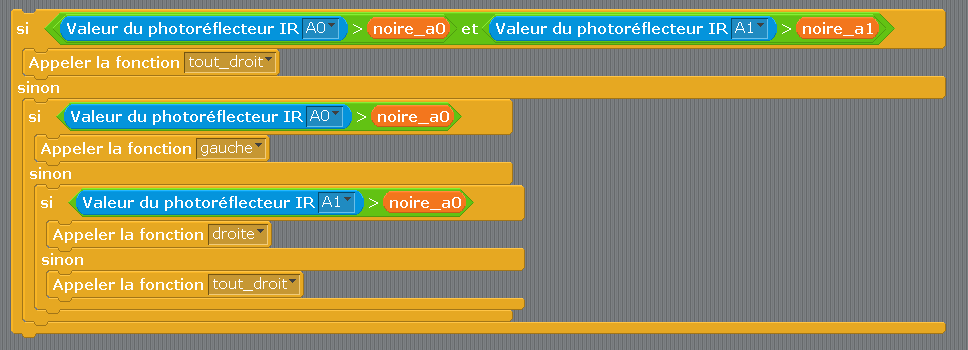
Programme pour que ton robot maintienne les deux photo réflecteurs de chaque coté de la ligne noire et ainsi suivre la ligne noire :
- si les deux photo réflecteurs sont sur le blanc, le robot va tout droit,
- si le photo réflecteur droit A0 est sur le blanc alors le robot doit aller vers la ligne noire en tournant à gauche,
- si le photo réflecteur gauche A1 est sur le blanc alors le robot doit rejoindre la ligne noire en tournant à droite :
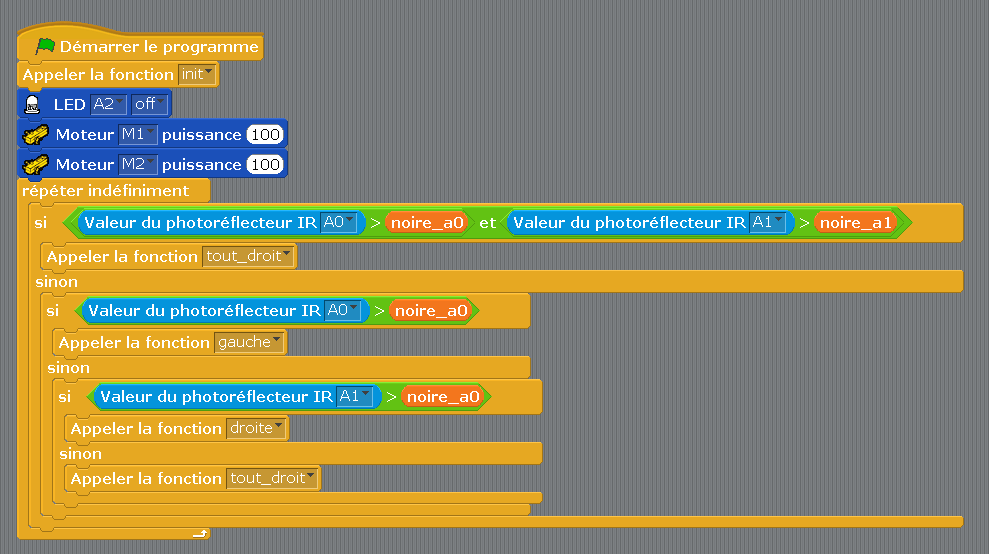
Puis rajoute au programme principal :
Essaye ton robot après un transfert :
Pose ton robot avec les deux photo réflecteurs sur la ligne noire pour la phase d’apprentissage de la couleur noire , puis appuie sur la capteur de pression. Ton robot suit la ligne noire même dans les courbes difficiles.
Vérifie le comportement de ton robot :
- Les deux photo réflecteurs dans le blanc on avance tout droit.
- Seul le photo réflecteur droit voit le blanc alors on tourne à gauche,
- Seul le photo réflecteur gauche voit le blanc alors on tourne à droite,
- Autrement le robot avance tout droit.
Modifie ton programme pour que ton robot s’arrête sur un nouvel appui sur le capteur de pression :